Optimal Dividend, Reinsurance, and Capital Injection for Collaborating Business Lines under Model Uncertainty
This paper considers an insurer with two collaborating business lines that faces three critical decisions: (1) dividend payout, (2) reinsurance coverage, and (3) capital injection between the lines, in the presence of model uncertainty. The insurer c…
Authors: Tim J. Boonen, Engel John C. Dela Vega, Len Patrick Dominic M. Garces
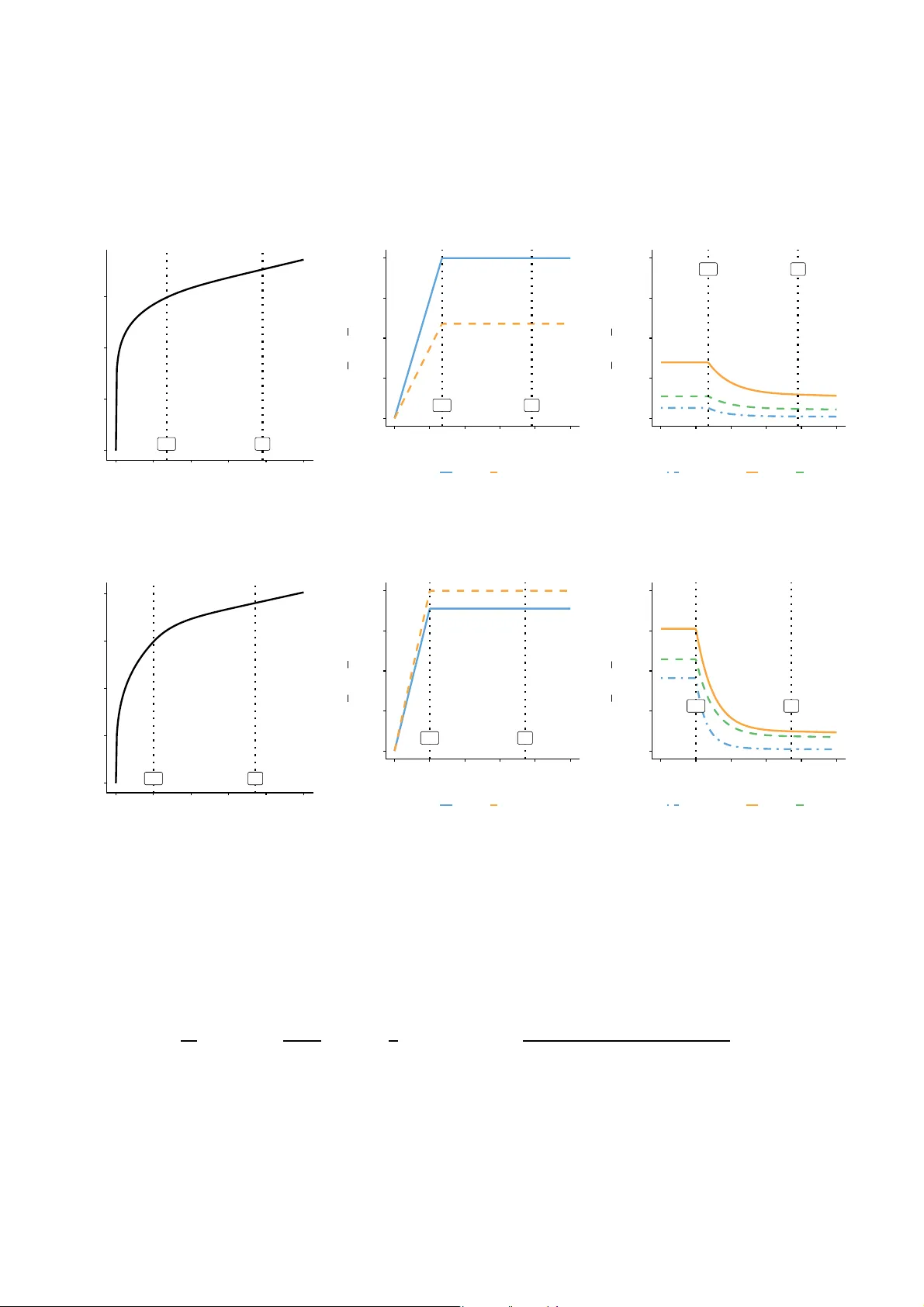
Optimal Dividend, Reinsurance, and Capital Injection for Collab orating Business Lines under Mo del Uncerta in t y Tim J. Bo onen ∗ Engel John C. Dela V ega † Len P atric k Dominic M. Garces ‡ Abstract This pap er considers an insurer with tw o collabo r ating business lines that faces three critical decisions: (1) dividend payout, (2) reinsura nce cov erage, and (3) capital injection betw een the lines, in the prese nce of model uncertain t y . The insurer considers the reference mo del to b e an appr oximation of the true mo del, and each line has its own r obustness preference. The reserve level o f each line is mo deled using a diffusion pro cess. The ob jective is to obtain a robust strategy that maximizes the exp ected weigh ted sum of discounted dividends until the first ruin time, while incorp or ating a penalty term for the distor tion b e tw een the refer ence and alterna tive mo dels in the worst-case scenario. W e completely solve this pr oblem and obtain the v alue function and optimal (equilibrium) strategies in closed form. W e show that the o ptima l dividend-capital injection strategy is a barrier stra tegy . The o ptimal prop ortion o f ris k ceded to the reinsur er and the deviation of the worst-case mo del from the r eference mo del are decr e asing with re spec t to the a g grega te reserve level. Finally , numerical examples a re presented to show the impact of the mo del pa rameters and ambiguit y aversion on the optimal stra tegies. Keyw ords : Risk management, optimal dividends, prop ortional reinsur ance, mo del uncertaint y , collab orat- ing lines . 1 In tro d uction The optimal dividend pa y out problem is a classical topic in actuarial science, op erational researc h, and mathematical finance. In his seminal wo rk, de Finetti ( 1957 ) p rop osed maximizing the d ividends p aid to the shareholders ov er the lifetime of an insu r ance p ortfolio as an alternativ e p erformance m easure to minimizing the p robabilit y of r uin. Under the fr amew ork of de Finetti ( 1957 ), the optimal w a y to distribute d ividends is the so-called b arrier -t yp e strategy , in w hic h all reserv es exceeding a fixed barrier lev el are immed iately paid out as divid ends. Since then, numerous extensions and v ariations hav e b een explored; see, e.g., Sc hmidli ( 2008 ), Albrec her and Thonhauser ( 2009 ), and Av anzi ( 2009 ) for comprehensive o v erviews. Ho w ever, muc h of the literature has fo cused on single b usiness lines. W e consid er a multiv ariate extension of the cla ssical framew ork of de Finetti ( 195 7 ) in whic h eac h b u siness line has its o wn reserve p ro cess. The insurer’s ob jectiv e is to maximize the total discoun ted d ividends paid by the b usiness lines to the sh areholders up to the p ortfolio’s r uin time. This raises an imp ortant question: how should ru in time b e defined in a multi v ariate setting? S ev eral natural d efinitions app ear in the literature. Th e most common d efinitions include first ruin time: the first time when at least one of the reserve lev el s reac hes or falls b elo w zero; sum ru in time: the fir st time that the total reserv es of all lines r eac h or fall b elo w zero; simultane ous r uin time: the first time that all of the reserv e lev e ls reac h or fall b elo w zero sim ulta neously; and la st ruin time: the firs t time that all of the reserv e level s, not n ecessarily simultaneously , ha v e reac hed or fallen b elo w zero. As such, the problem of minimizing the probability of ruin has b een widely studied; see, e.g., Asm ussen and Albrec her ( 2010 , Chapter XI I I ) and the references therein. There ha v e b een s everal w orks in the m ultiv ariate framew ork that fo cus on maximizing th e total discounted dividends to shareh olders unt il ruin time. T o the b est of the authors’ knowledge, Czarna and Palmo ws k i ( 2011 ) ∗ Department of Statistics and A ctuarial Science, School of Computing and Data Science, Universit y of Hong K on g, China. Email: tjboonen@h ku.hk . † Department of Statistics and A ctuarial Science, School of Computing and Data Science, Universit y of Hong K on g, China. Email: engel john.dela vega@mymail.uni sa.edu.au . ‡ School of Ma thematical and Ph ysical Sciences, F aculty of Science, Un iversit y of T echnology Sydney , A u stralia. E-mail: LenPatrick Dominic.G arces@uts .edu.au . 1 are the first to study this p r oblem und er the Cram ´ er-Lundb erg (CL) mo d el (i.e., a comp ound Poisson pro cess). Most su bsequen t work has also used the CL mo del; see Liu and Cheung ( 2014 ), Albrec her et al. ( 2017 ), Azcue et al. ( 2019 ), Azcue and Muler ( 2021 ), and S trietzel and Heinric h ( 2022 ). Reserve lev els mo d eled b y diffusion pro cesses h av e also b een explored in the m ultiv ariate con text; see Gu et al. ( 2018 ), Grandits ( 2019 ) , Y ang et al. ( 2025 ), Bo onen et al. ( 2025 ), and Bo onen and Dela V ega ( 2025 ). Managing risk across multiple lines of bu s iness is also essen tial for ens uring that sufficient reserves are a v ailable for d ividend p ay outs. Reinsur an ce, as a form of risk con trol, has b een explored in th e multiv ariate framew ork of optimal dividend pay out problems. Prop ortional reinsurance is the p redominan t type; see Czarna and P almo wski ( 2011 ), Liu and Cheu ng ( 2 014 ), Azcue et al. ( 20 19 ), Strietzel and Heinric h ( 2022 ), Bo onen et al. ( 2025 ), and Y ang et al. ( 2025 ). Excess-of-loss reins u rance has also b een stu d ied in Bo on en and Dela V ega ( 2025 ). Capital injection is another form of risk m anagemen t th at allo ws insurers to prev en t ru in. In the conte xt of m ultiple business lines, capital injection can b e made b et w een lines to sa v e one line from insolv ency , provided sufficien t reserv es are a v ailable. This t yp e of capital injection is referred to as c ol lab or ation . I n Albrec her et al. ( 2017 ), Gu et al. ( 2018 ), Bo onen et al. ( 2025 ), and Boonen and Dela V ega ( 2025 ), the rule of collab oration p ermits the transfer of reserv es b etw een lines only wh en one is at risk of ruin an d pro vided that the trans f er do es not endanger the solven t line. In con trast, Grandits ( 2019 ) allo ws for capital transfers but do es not oblige an y line to sa v e another. A common feature of the ab o v e-men tioned literature is the assump tion that the p robabilistic m o del that go v erns the reserve pro cesses is known. Pa rameters su c h as the drift, v olatil it y , and even the claim int ensit y are assumed to b e accurate. In practice, h o w e v er, th ese quantitie s are estimated fr om historical data and are sub ject to statistical error and missp ecification. As a r esult, strategies obtained un der a single reference mo del ma y p erf orm p o orly . Ignoring m o del uncertaint y may lead to o v e rly aggressiv e dividend pa y out policies, insufficient reinsu rance co v erage, or w eak capital injection ru les. Mo del am biguit y has b een considered in sev eral insur ance decision problems, including reinsu rance with m ultiple reinsurers ; see, e.g., Cao et al. ( 2023 ). F or a comprehensiv e discussion of decision-making under mo del uncertain t y , w e refer th e reader to Hansen and Sargen t ( 2008 ). Motiv ated by these considerations, we incorp orate m o d el u n certain t y into the problem of op timal dividend , reinsurance, and capital inj ection b et w e en collab orating bu siness lines. More precisely , th e reference prob- abilit y measure is regarded by the insurer as an appr oximati on to the true, alb eit u nkno wn, mo del, whic h is assum ed to b elong to a set of alternativ e probabilit y m easures. The in surer then considers the strategies under the wo rst-case mo d el within this set, wh ic h, consequen tly , promotes robustness against p ossible mo del missp ecification. T o pr ev en t the ins u rer from accepting implausible alternativ e models that are “t o o far” from the reference mod el, a discoun ted p enalt y term is introdu ced in the optimizati on criterion. This p enalt y is based on relativ e en trop y , whic h quan tifies the distance (i.e., div ergence) b et w een probability measures, and is mo dified to accoun t for b oth a normalization f actor and line-sp ecific ambiguit y av ersion. Th e resulting f orm u- lation falls within a p enalt y-based robust cont rol appr oac h p ioneered b y Anderson et al. ( 2 003 ) and Hansen et al. ( 2006 ). More sp ecifically , the formulation of decision-making under mo del uncertain t y in this pap er follo ws the homothetic robus tness form ulation p rop osed by Maenhout ( 2004 ). In this form ulation, th e p enalty term is dep endent on the v alue function itself, whic h p reserv es the analytical tracta bilit y of the robust con trol problem. This approac h to mo deling un certain t y has b een adopted in r obust p ortfolio optimization ( W ei et al. , 2023 ; Garces and Sh en , 2025 ) and r obust reinsurance ( Hu et al. , 2018 ; F eng et al. , 2021 ). Robust form ulat ions of the optimal dividend p ay out pr oblem h av e b een studied in the univ ariat e set- ting. F eng et al. ( 2021 ) consid er pr op ortional r einsurance w ith an O rnstein-Uhlen b ec k-t yp e r eserv e pro cess. Chakrab orty et al. ( 20 23 ) consider a Bro wnian risk mo del with a generalized rewa rd function and a p enalt y term based on the Kullback- Leibler div ergence. Capital injection via equity issu ance has b een studied in W ang 2 et al. ( 2025 ) under the standard d eviation pr emium principle, and r obust dividend strategies within th e clas- sical C L f ramew ork are in v estig ated in F eng et al. ( 2024 ). The impact of mo del u n certain t y in a m ultiv ariate setting remains largely unexp lored. In this w ork, we consider an insur er that must simultaneo usly determine (i) d ividend pa y out p olicies, (ii) (prop ortional) reinsurance co v erage lev els, and (iii) capital injections b et w een collab orating business lines under mo del uncertain t y . W e apply a d iffu sion model for the risk exp osure of eac h line, and we allo w correlation b et w een the lin es. Th e goal is to maximize the w eigh ted total discoun ted divid ends unti l the fi rst r uin time, taking into accoun t the worst-case scenario. W e incorp orate a p enalt y term based on relativ e entrop y , which p enalizes d eviations from the reference mo del. T o the b est of our kno wledge, this is the fi rst study on an optimal dividend p a y out problem inv o lving reinsurance co v erag e and capital injection b et w e en collab orating lines while explicitly accoun ting for mo d el un certain t y . W e su m marize the main con tributions of this pap er as follo w s: 1. W e identi fy three general scenarios and deriv e, in closed form, the corresp onding v alue fu nction and optimal s tr ategi es for eac h scenario (see Theorems 3.4 , 3.6 , and 3.8 ). The scenarios are determined by whether the am biguit y av ersion of eac h line is sufficien tly large and whether the in terpla y b et w e en the parameters, particularly risk, am biguit y , and correlation, s atisfies certain te c hnical conditions. This is analogous to the results in F eng et al. ( 2021 ), who also identify three scenarios in the univ aria te setting with an O rnstein-Uhlen b ec k-t y p e reserv e pro cess. Setting ρ = 0 in their notation corresp onds to our case where one line has ceded all of its r isk to the reinsurer (see Section 3.2 ). 2. W e sho w that an optimal dividend and capita l injectio n strategy is a b arrier strategy . More p recisely , w e prov e that there exists a barr ier lev el b ≥ 0 such that the optimal strategy main tains the aggregate reserv e b elo w b , w ith dividends paid exclusive ly by the m ore important line, and capital is tran s ferred from the less imp ortan t line, ens uring su fficien t reserve s for d ividend d istribution. This is consisten t w ith the results pr esen ted in Gu et al. ( 2 018 ), where th ey also discuss d ividend pay out with capital injectio ns b et w een collab orating lines. F or suffi ciently high ambiguit y a v e rsion, th e optimal barr ier collapses to b = 0, implying th at the optima l reinsurance and distortion strategies b ecome irrelev ant (see Th eorem 3.8 ). 3. W e pr o v e that, for sufficientl y low am biguit y a v e rsion, t he optimal r etained reinsurance lev els are in - creasing with resp ect to the aggregate r eserve lev el. Moreo v er, except in th e case where one line adopts full r einsurance at all times (see Pr op osition 3.10 ), the t w o optimal r einsurance lev els are sim ultaneously constan t. The monotonicit y p rop ert y is consistent with existing r esults in th e literature, for instance in Højgaard and T aksar ( 1999 ) f or the univ a riate case and Boon en et al. ( 2025 ) for the multiv ariate case. 4. W e s h o w that, for suffi cien tly lo w ambiguit y a v ersion, the deviation of the worst-ca se probabilit y measur e from the reference measure decreases as the aggregate reserve lev el increases. The deviation remains constan t and atta ins its maximal lev el as long as b oth lines engag e in prop ortional r einsurance. Once one line switc hes to full reinsu rance, the deviation strictly decreases. 5. W e further explore the effects of mo del uncertain t y via th e am biguit y-a ve rsion p arameters on the optimal strategies in our n umerical ill ustrations in S ection 5 . W e observ e that the deviat ion of th e w orst-case mo del from the reference mo del b ecomes le ss sensitive to fu rther increases in the ag gregate reserve lev el. In addition, c hanges in the ambiguit y-av ersion parameters can alter w hic h line retains all of its r isk b ey ond a certain reinsur ance thr eshold. Finally , w e find that strong asymmetry in the ambiguit y-a v ersion parameters b et w ee n th e t w o lines can lead to a lo w er dividend barr ier and a low er reserve th r eshold at whic h one line optimally retains all of its risk. 3 The rest of the pap er is organized as follo ws. Section 2 in trodu ces the mo del, the formulatio n of the problem, and the corresp onding verificat ion theorem. Section 3 presents the main results, while Section 4 discusses the results un d er the assump tion of no m o del uncertain t y . Numerical examples are presented in S ection 5 . The pro ofs of the main results are pr esen ted in Section 6 . Section 7 concludes. App endices A and B pro vide the pro ofs of the v erification theorem and the r esults concerning no mo del u n certain t y , resp ectiv ely , and Ap p endix C pro vides additional numerical results. 2 Mo del 2.1 Problem F orm ulation W e fix a complete filtered probabilit y space (Ω , F , F , P ), where F := {F t } t ≥ 0 is a righ t-cont in uous, P - completed fi ltration generated b y t w o ind ep endent Brownian motions B 1 := { B 1 ( t ) } t ≥ 0 and B 2 := { B 2 ( t ) } t ≥ 0 . Define t w o correlated Bro wnian motions W 1 := { W 1 ( t ) } t ≥ 0 and W 2 := { W 2 ( t ) } t ≥ 0 b y W 1 ( t ) := B 1 ( t ) and W 2 ( t ) := ρB 1 ( t ) + p 1 − ρ 2 B 2 ( t ), where ρ ∈ ( − 1 , 1) captures the correlatio n b et w een the t wo B ro wnian motions W 1 and W 2 . W e consider an insurer that b egins with a r eference mo del for the r eserv e pro cess un der the reference probabilit y measure P , wh ich serv es as an approximati on to the “true” mo d el. Moreo v e r, the insurer h as t w o collaborating b usiness lines, w here the risk exp osure of Line i , with i = 1 , 2, is gov erned by a diffusion pro cess giv en b y d R i ( t ) = ˜ µ i d t + σ i d W i ( t ) , where ˜ µ i , σ i > 0. The insur er c harges a premium for taking the risk R i via the exp ected-v alue p rinciple with a loading factor α i ≥ 0; that is, the p remium rate for Line i is giv en by ˜ P i ( t ) = (1 + α i ) ˜ µ i . The insur er is faced with thr ee t ypes of decisions regarding the op eration of eac h line: reinsurance, dividend pa y out, and capital injection b etw een the lines. Eac h decision is describ ed as follo ws: 1. Reinsurance decision. F or eac h line, the in surer can pur c hase pr op ortional r einsurance to transf er part of its risk R i to a reinsurer. F or i = 1 , 2 , let π i ( t ) ∈ [0 , 1] d enote the retained prop ortion of Line i at time t and P i ( t ) the premiu m f or su c h a reinsurance p olicy . T he p remium is calculate d using the same exp ected-v alue principle and relativ e safety loading α i ; th at is, P i ( t ) = (1 + α i ) (1 − π i ( t )) ˜ µ i . The loadings for insurance and reinsu rance are equal, whic h is sometimes referred to as “c heap reinsurance”. 2. Dividend pay out decision. The insu rer also c hooses a dividend strategy to distribu te pr ofits to the share- holders for eac h line. Let C i := { C i ( t ) } t ≥ 0 denote the total dividends paid by Line i to the shareholders. This is called an un restricted (or un b ounded) d ividend-pa ymen t strategy (see S ection 3 in Højgaard and T aksar , 1999 , or Case C in Jean blanc-Picqu ´ e and Sh iry aev , 199 5 ). W e treat C 1 and C 2 as singular-t yp e con trols. 3. Capital injection decision. In addition to seeking pr otecti on from outside reinsurer s , the in surer can also allocate surplu s from one line to another, at no c ost . Let L i := { L i ( t ) } t ≥ 0 denote the cumulative amount of capital tr an s ferred into Line i f rom Line 3 − i ; b oth L 1 and L 2 are n ondecreasing, c´ adl´ ag, singular-t yp e con trols. Giv en an admissible con trol u := ( π 1 , π 2 , C 1 , C 2 , L 1 , L 2 ), the r eserv e pro cess of Line i , denoted by X i := X u i , follo ws the dynamics d X i ( t ) = ˜ P i ( t ) − P i ( t ) d t − π i ( t ) d R i ( t ) − d C i ( t ) + d L i ( t ) − d L 3 − i ( t ) , = µ i π i ( t )d t − σ i π i ( t )d W i ( t ) − d C i ( t ) + d L i ( t ) − d L 3 − i ( t ) , 4 where µ i := α i ˜ µ i is the adjusted mean and X i (0) = x i > 0 is the initial reserv e lev el of Line i . In the f r amew ork of mo del uncertaint y , due to insu fficien t data, the insurer d o es not h a v e full confidence in the reference m o del. Th e insurer is am b iguit y a v ers e and th us prefers to consid er a family of unsp ecified alternativ e mo dels, whic h are not to o far a w a y from the reference mo d el. W rite θ i := { θ i ( t ) } t ≥ 0 for i = 1 , 2, and set θ := ( θ 1 , θ 2 ). W e assume that θ is progressivel y measurable with resp ect to the filtration F and satisfies the follo wing No vik ov- t yp e condition: for an y t > 0, E P " exp 1 2 Z t 0 θ 2 1 ( s ) + θ 2 ( s ) − ρ θ 1 ( s ) 2 1 − ρ 2 d s !# < ∞ . (2.1) W e defi n e th e alternativ e probabilit y measure Q θ on F t b y d Q θ d P F t = exp Z t 0 θ 1 ( s ) d B 1 ( s ) + Z t 0 θ 2 ( s ) − ρ θ 1 ( s ) p 1 − ρ 2 d B 2 ( s ) − 1 2 Z t 0 h θ 2 1 ( s ) + θ 2 ( s ) − ρ θ 1 ( s ) 2 1 − ρ 2 i d s ! . By Girsano v’s theorem for m ultidimensional Bro wnian motion (see, for exa mple, Øksendal , 2013 , Th eorem 8.6.6, or Pham 2009 , page 21), for an y time t 0 > 0 the pro cesses { W Q θ i ( t ) } t ≥ 0 , where W Q θ i ( t ) := W i ( t ) − Z t 0 θ i ( s ) d s, 0 ≤ t ≤ t 0 , i = 1 , 2 , form a t w o-dimensional Bro wnian motion with correlation ρ und er Q θ . It should also b e noted that if θ 1 ( t ) = θ 2 ( t ) ≡ 0, then the alternativ e measure Q θ coincides with the reference measure P . W e can then express the dynamics of the con trolled reserve process of L in e i under Q θ as d X i ( t ) = µ i π i ( t ) d t − σ i π i ( t ) d W i ( t ) − d C i ( t ) + d L i ( t ) − d L 3 − i ( t ) = µ i π i ( t ) d t − σ i π i ( t ) h d W Q θ i ( t ) + θ i ( t ) d t i − d C i ( t ) + d L i ( t ) − d L 3 − i ( t ) = µ i π i ( t ) − σ i θ i ( t ) π i ( t ) d t − σ i π i ( t ) d W Q θ i ( t ) − d C i ( t ) + d L i ( t ) − d L 3 − i ( t ) , for i = 1 , 2. W e formally d efine admissible strategies b elo w. Definition 2.1. The str ate gies u and θ ar e said to b e admissible if u is adapte d to the filt r ation F , θ is pr o gr essively me a sur able with r esp e c t to F , and they satisfy (i) π i ( t ) ∈ [0 , 1] for i = 1 , 2 and t ≥ 0 ; (ii) C i and L i ar e nonne gative, nonde cr e asing, and right-c ontinuous with left limits, for i = 1 , 2 ; (iii) ( θ 1 , θ 2 ) satisfies Novikov’s c ond ition in ( 2.1 ) for t ≥ 0 . Denote by U the set of al l admissible u , and Θ the set of al l admissible θ . In this setting, th e insurer has reserv atio ns ab out the referen ce mo d el and views it merely as an app ro xi- mation to the “true” mo del. Since the “true” m o del (if one exists) is also in the set of alternativ e mo dels, the am biguit y -av erse insurer wan t s to find a r obust decision rule that is feasible across all alternativ e mo dels. A natural approac h is to analyze the prob lem fr om a w ors t-case p ers p ectiv e. W e now form ulat e the corresp ond ing robust con t rol p r oblem. Define the (fir st) ruin time, τ u , b y τ u := inf { t > 0 : min { X u 1 ( t ) , X u 2 ( t ) } ≤ 0 } . 5 The goal of the insur er is to seek a robust optimal con trol that solve s the follo wing optimization p roblem: V ( x 1 , x 2 ) = sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δt d C i ( t ) + Z τ u 0 e − δt θ 2 i ( t ) V ( X u 1 ( t ) , X u 2 ( t )) 2 e β i d t # , (2.2) where a i ∈ (0 , 1) is the r elativ e imp ortance of Line i and satisfies a 1 + a 2 = 1, e β i is the robu stness preferen ce parameter of Line i , and δ is the discount rate. Moreo v e r, th e exp ectation E Q θ is tak en under X u 1 (0) = x 1 and X u 2 (0) = x 2 . Larger e β i implies a lo w er p enalt y on mo d el distortion and therefore stronger ambiguit y av ers ion in the wo rst-case formulat ion. Remark 2.2. The first term in ( 2.2 ) is similar to the obje ctive i n Gu et al. ( 2018 ), wher e they also c onsider an insur er with two c ol lab o r ating lines. However, they do not al low the insur er to pur chase r einsur anc e c over age and ther e is no mo del unc ertainty. F eng et al. ( 2021 ) also c onsider a similar optimization pr oblem with b oth terms in ( 2.2 ) pr esent in their obje ctive function, but in the univariate fr amework. The se c ond term c an b e interpr ete d as a “p enalty” with r esp e ct to the minimization pr oblem over θ , derive d fr om the form of disc ounte d r elative entr o py. We c an also se e the optimization pr oblem in ( 2.2 ) as a zer o-sum sto chastic differ ential game whose players ar e (i) the i nsur er with c ontr ol u and (ii) the market with c on tr ol θ . Denote ϑ := ( π 1 , π 2 , θ 1 , θ 2 ) and define the generator L ϑ 0 ( φ ) for some C 2 , 2 function φ b y L ϑ 0 ( φ ) = 2 X i =1 [ µ i π i − σ i θ i π i ] ∂ φ ∂ x i + 1 2 σ 2 i π 2 i ∂ 2 φ ∂ x 2 i + ρσ 1 σ 2 π 1 π 2 ∂ 2 φ ∂ x 1 ∂ x 2 − δ φ. W rite β i := e β i a i for i = 1 , 2. The asso ciated HJB equation is give n by sup ( sup π i ∈ [0 , 1] inf θ i ∈ R " L ϑ 0 ( V )( x 1 , x 2 ) + V ( x 1 , x 2 ) 2 X i =1 θ 2 i 2 β i # , a 1 − ∂ V ∂ x 1 ( x 1 , x 2 ) , a 2 − ∂ V ∂ x 2 ( x 1 , x 2 ) , ∂ V ∂ x 1 ( x 1 , x 2 ) − ∂ V ∂ x 2 ( x 1 , x 2 ) , ∂ V ∂ x 2 ( x 1 , x 2 ) − ∂ V ∂ x 1 ( x 1 , x 2 ) ) = 0 , (2.3) with b ound ary condition V (0 , 0) = 0. Since ∂ V ∂ x 1 − ∂ V ∂ x 2 ≤ 0 and ∂ V ∂ x 2 − ∂ V ∂ x 1 ≤ 0 hold sim ultaneously by ( 2.3 ), it follo ws that ∂ V ∂ x 1 = ∂ V ∂ x 2 . As such, there exists a univ aria te function, g : x ∈ R + 7→ R , such that g ( x ) = V ( x 1 , x 2 ) , with x := x 1 + x 2 ≥ 0 . Using this representat ion of g , we ha v e g ′ ( x ) = ∂ V ∂ x i ( x 1 , x 2 ) and g ′′ ( x ) = ∂ 2 V ∂ x i ∂ x j ( x 1 , x 2 ) , i, j = 1 , 2 . Define the one-dimensional generator L ϑ ( ϕ )( x ) := L ϑ 0 ( φ )( x 1 , x 2 ), w here ϕ ( x ) = φ ( x 1 , x 2 ) w ith x := x 1 + x 2 for some C 2 function ϕ . W e can then rewrite ( 2.3 ) as sup ( sup π i ∈ [0 , 1] inf θ i ∈ R " L ϑ ( g )( x ) + g ( x ) 2 X i =1 θ 2 i 2 β i # , a 1 − g ′ ( x ) , a 2 − g ′ ( x ) ) = 0 , (2.4) with b oun dary condition g (0) = 0. Based on the structure of the HJB equations ( 2.3 ) and ( 2.4 ), we conjecture that the optimal dividend-capital injection s tr ategy follo ws a barrier strategy similar to that in Gu et al. ( 2018 ) . 6 x 1 x 2 (0 , b ) ( b, 0) A 1 A 2 A 3 x 1 + x 2 = b x 1 = b Figure 1: Regions for dividend pay out and capital injection decis ions. W e giv e the defin ition of barrier strateg ies and then pro vide the ve rification theorem b elo w. Definition 2.3. L et ( C 1 ,b , C 2 ,b , L 1 ,b , L 2 ,b ) := ( { C 1 ,b ( t ) } , { C 2 ,b ( t ) } , { L 1 ,b ( t ) } , { L 2 ,b ( t ) } ) t ≥ 0 denote the b arrier str ate gy with a b arrier b . F or this str ate gy, we p artition the domain of the r e serve level p air ( x 1 , x 2 ) ∈ R 2 + into thr e e r e gions (se e Figur e 1 ). The thr e e r e gions A i , i = 1 , 2 , 3 , ar e define d as fol lows: • A 1 = { ( x 1 , x 2 ) : x 2 ≥ 0 , x 1 > b } , • A 2 = { ( x 1 , x 2 ) : x 1 ∈ [0 , b ] , x 2 > 0 , x 1 + x 2 > b } , • A 3 = { ( x 1 , x 2 ) : x 1 ≥ 0 , x 2 ≥ 0 , x 1 + x 2 ≤ b } . The b arrier str ate gy is then as f ol lows: (i) If ( x 1 , x 2 ) ∈ A 1 , Line 1 tr ansfers an amount x 1 − b to Line 2 and we pr o c e e d to (ii). (ii) If ( x 1 , x 2 ) ∈ A 2 , Line 2 dir e ctly p ays an amount x 1 + x 2 − b as dividends and we pr o c e e d to (iii). (iii) If ( x 1 , x 2 ) ∈ A 3 , Line 2 ke eps the aggr e gate r eserve r efle cte d at b whenever the aggr e gate r eserve level r e a ches b f r om b elow; that is, we stay in r e gion A 3 until ruin. W hen the r eserve p air r e aches either axis, the insur er applies c ap ital tr a nsfers fr om the other line to ke ep b oth r eserve levels p os itive. The pr o blem ends when the r eserve p air r e aches (0 , 0) . 2.2 V erification Theorem In traditional dividend problems wh er e there is no mo del u ncertain t y , the techniques used to pro v e the corresp onding v erification theorem may not b e applicable when m o del un certain t y is present. S ince the opti- mization p roblem ( 2.2 ) can b e seen as a zero-sum sto c hastic differen tial game, differen t tec hniques are required to establish and pr ov e its v erification theorem. W e no w pro ceed to pr esent the v erificat ion theorem. Theorem 2.4 (V erification Theorem) . L et X u ( t ) := X u 1 ( t ) + X u 2 ( t ) . Supp o se ther e exist: (i) an incr e asing c o nc ave function w ( x ) ∈ C 2 with w ′ ( x ) > a 2 for x ∈ [0 , b ∗ ) , w ′ ( x ) = a 2 for x ∈ [ b ∗ , ∞ ) , w (0) = 0 , (ii) a M arkov c ontr ol u ∗ ( X u ∗ ( t )) = ( π ∗ 1 ( X u ∗ ( t )) , π ∗ 2 ( X u ∗ ( t )) , C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ) ∈ U , wher e the dividend- c apital inje ction str ate gy ( C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ) is a b ar rier str ate gy, and (iii) a Markov pr o c ess θ ∗ := ( { θ ∗ 1 ( X u ∗ ( t )) } t ≥ 0 , { θ ∗ 2 ( X u ∗ ( t )) } t ≥ 0 ) ∈ Θ , such that L ( π 1 ,π 2 ,θ ∗ 1 ( x ) ,θ ∗ 2 ( x )) ( w )( x ) + 2 X i =1 ( θ ∗ i ( x )) 2 2 β i w ( x ) ≤ 0 , for al l π 1 , π 2 ∈ [0 , 1] and x ≥ 0 , (2.5) 7 L ( π ∗ 1 ( x ) ,π ∗ 2 ( x ) ,θ 1 ,θ 2 ) ( w )( x ) + 2 X i =1 θ 2 i 2 β i w ( x ) ≥ 0 , for al l θ 1 , θ 2 ∈ R and x ∈ [0 , b ∗ ] , (2.6) L ( π ∗ 1 ( x ) ,π ∗ 2 ( x ) ,θ ∗ 1 ( x ) ,θ ∗ 2 ( x )) ( w )( x ) + 2 X i =1 ( θ ∗ i ( x )) 2 2 β i w ( x ) = 0 , for al l x ∈ [0 , b ∗ ] . (2.7) Then, w ( x ) = sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δt d C i ( t ) + Z τ u 0 e − δt θ 2 i ( t ) w ( X u ( t )) 2 e β i d t # = inf θ ∈ Θ sup u ∈U E Q θ " 2 X i =1 a i Z τ u 0 e − δt d C i ( t ) + Z τ u 0 e − δt θ 2 i ( t ) w ( X u ( t )) 2 e β i d t # = E Q θ ∗ " 2 X i =1 a i Z τ u ∗ 0 e − δt d C i,b ∗ ( t ) + Z τ u ∗ 0 e − δt ( θ ∗ i ( X u ∗ ( t ))) 2 w ( X u ∗ ( t )) 2 e β i d t !# . Mor e o ver, u ∗ and θ ∗ ar e the optimal str ate gies; that is, ( u ∗ , θ ∗ ) is the Nash e quilibrium of the zer o-sum sto chastic differ ential game. Pr o of. See App endix A . Using the verificatio n th eorem, if w e can fi n d a classical solution to the HJB equation ( 2.3 ), then the solution is equal to the v al ue fun ction in ( 2.2 ). In the next section, we iden ti fy such cla ssical solutions. 3 Analytical Solutions In this section, we study the ins u rer’s optimization pr oblem in ( 2.2 ) and obtain th e optimal strategies u ∗ and θ ∗ , and the v alue function V ( x 1 , x 2 ) = g ( x ). Due to symmetry b et w e en the t wo lines, w e assu m e, without loss of generalit y , that a 1 ≤ 1 2 for the rest of the pap er (i.e., Line 2 is the more im p ortan t line). First, w e isolate the optimization o v er θ i (distortion decision) in ( 2.4 ) and solv e inf θ 1 ∈ R ,θ 2 ∈ R θ 2 1 2 β 1 + θ 2 2 2 β 2 g ( x ) − ( σ 1 π 1 θ 1 + σ 2 π 2 θ 2 ) g ′ ( x ) , from whic h w e obtain the candidate minimizers as b θ 1 ( x ) = β 1 σ 1 π 1 g ′ ( x ) g ( x ) and b θ 2 ( x ) = β 2 σ 2 π 2 g ′ ( x ) g ( x ) . (3.1) Using ( 3.1 ), w e can then solv e the optimization o v er π i (reinsurance decision) in ( 2.4 ) : sup π 1 ∈ [0 , 1] ,π 2 ∈ [0 , 1] 1 2 σ 2 1 π 2 1 + 1 2 σ 2 2 π 2 2 + ρσ 1 σ 2 π 1 π 2 g ′′ ( x ) + ( µ 1 π 1 + µ 2 π 2 ) g ′ ( x ) − 1 2 β 1 σ 2 1 π 2 1 + β 2 σ 2 2 π 2 2 g ′ ( x ) 2 g ( x ) , and, ignoring the constrain ts o v er [0 , 1], we obtai n the follo wing candidate maximizers: b π 1 ( x ) = ( µ 1 σ 2 − ρµ 2 σ 1 ) g ′′ ( x ) g ′ ( x ) g ( x ) 2 − β 2 µ 1 σ 2 g ′ ( x ) 3 g ( x ) σ 2 1 σ 2 [( β 1 + β 2 ) g ′′ ( x ) g ′ ( x ) 2 g ( x ) − (1 − ρ 2 ) g ′′ ( x ) 2 g ( x ) 2 − β 1 β 2 g ′ ( x ) 4 ] , b π 2 ( x ) = ( µ 2 σ 1 − ρµ 1 σ 2 ) g ′′ ( x ) g ′ ( x ) g ( x ) 2 − β 1 µ 2 σ 1 g ′ ( x ) 3 g ( x ) σ 1 σ 2 2 [( β 1 + β 2 ) g ′′ ( x ) g ′ ( x ) 2 g ( x ) − (1 − ρ 2 ) g ′′ ( x ) 2 g ( x ) 2 − β 1 β 2 g ′ ( x ) 4 ] . (3.2) The analysis of th e optimal strategies b elo w is divided into cases inv olving the relativ e Sharp e ratio µ 1 /σ 1 µ 2 /σ 2 , the correlation ρ , and the ambiguit y-av ersion p arameters β 1 and β 2 . 8 3.1 The Case of 0 < ρ 1+ β 2 γ 1 1 − γ 1 ≤ µ 1 /σ 1 µ 2 /σ 2 ≤ 1+ β 1 γ 1 1 − γ 1 ρ In this section, we consider the follo w in g condition: 0 < ρ 1 + β 2 γ 1 1 − γ 1 ≤ µ 1 /σ 1 µ 2 /σ 2 ≤ 1 + β 1 γ 1 1 − γ 1 ρ , (3.3) where γ 1 is a solution to ψ ( z ) = 0 on (0 , 1) and ψ is defined as ψ ( z ) := e A ( z ) − 2 δ σ 2 1 σ 2 2 e B ( z ) , e A ( z ) := [ µ 2 1 σ 2 2 (3 ρ + 1)( ρ − 1) + µ 2 2 σ 2 1 (3 ρ + 1)( ρ − 1) + 2 µ 1 µ 2 σ 1 σ 2 (1 − ρ )(2 ρ 2 + ρ + 1)] z ( z − 1) 3 + [ − β 2 µ 2 1 σ 2 2 (2 β 1 + β 2 ) − β 1 µ 2 2 σ 2 1 ( β 1 + 2 β 2 ) + 2 β 1 β 2 µ 1 µ 2 σ 1 σ 2 ] z 3 ( z − 1) + [ µ 2 1 σ 2 2 ( β 1 − 3 ρ 2 β 2 + 2 ρβ 2 + 2 β 2 ) + µ 2 2 σ 2 1 ( β 2 − 3 ρ 2 β 1 + 2 ρβ 1 + 2 β 1 ) − 2 µ 1 µ 2 σ 1 σ 2 ( β 1 + β 2 )] z 2 ( z − 1) 2 + β 1 β 2 2 µ 2 1 σ 2 2 + β 2 1 β 2 µ 2 2 σ 2 1 z 4 , e B ( z ) := [( β 1 + β 2 ) 2 + 2(1 − ρ 2 ) β 1 β 2 ] z 2 ( z − 1) 2 + (1 − ρ 2 ) 2 ( z − 1) 4 + β 2 1 β 2 2 z 4 − 2(1 − ρ 2 )( β 1 + β 2 ) z ( z − 1) 3 − 2 β 1 β 2 ( β 1 + β 2 ) z 3 ( z − 1) . (3.4) W e introdu ce the follo wing notations that w ill b e used frequent ly in the analysis: w 1 := σ 2 1 σ 2 [( β 1 + β 2 ) γ 1 ( γ 1 − 1) − (1 − ρ 2 )( γ 1 − 1) 2 − β 1 β 2 γ 2 1 ] ( µ 1 σ 2 − ρµ 2 σ 1 )( γ 1 − 1) − β 2 µ 1 σ 2 γ 1 , w 2 := σ 1 σ 2 2 [( β 1 + β 2 ) γ 1 ( γ 1 − 1) − (1 − ρ 2 )( γ 1 − 1) 2 − β 1 β 2 γ 2 1 ] ( µ 2 σ 1 − ρµ 1 σ 2 )( γ 1 − 1) − β 1 µ 2 σ 1 γ 1 . (3.5) Remark 3.1. Condition ( 3.3 ) guar ante es that w 1 > 0 and w 2 > 0 . W e also introdu ce the follo win g terms: N 1 := 1 2 σ 2 1 w 2 0 w 2 1 + 1 2 σ 2 2 w 2 0 w 2 2 + ρσ 1 σ 2 w 2 0 w 1 w 2 , N 2 := µ 1 w 0 w 1 + µ 2 w 0 w 2 , N 3 := 1 2 β 1 σ 2 1 w 2 0 w 2 1 + 1 2 β 2 σ 2 2 w 2 0 w 2 2 , (3.6) where w 0 satisfies w 0 := inf { x > 0 : max { b π 1 ( x ) , b π 2 ( x ) } = 1 } . W e can interpret w 0 as the threshold that signals the insurer to engage in zero r einsurance f or at least one of th e lines. W e then hav e the follo wing scenarios: (i) if b π 1 ( w 0 ) < 1 = b π 2 ( w 0 ), then Line 2 en gages in zero r eins urance; (ii) if b π 2 ( w 0 ) < 1 = b π 1 ( w 0 ), then Line 1 engages in zero reinsu rance; and (iii) if b π 1 ( w 0 ) = 1 = b π 2 ( w 0 ), then b oth lines engage in zero reinsu rance. W e also define b ∗ b y b ∗ := inf { u : g ′ ( u ) = a 2 } . (3.7) W e ha v e not y et addressed the existence of γ 1 , defined as a solution to ψ ( z ) = 0. The follo win g lemma giv es a necessary and sufficient condition suc h that γ 1 ∈ (0 , 1) exists. Lemma 3.2. A solution to the e quation ψ ( z ) = 0 , wher e ψ is given by ( 3.4 ) , exists on (0 , 1) i f and only i f δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . Remark 3.3. It should b e note d that the solution of ψ ( z ) = 0 , if it exists on (0 , 1) , is not ne c essarily uniqu e . This do es not p ose a pr oblem in the analysis sinc e the value function is also not ne c essar ily uniqu e. F urthermor e, L emma 3.2 links the existenc e of a sol ution of ψ ( z ) = 0 in (0 , 1) to the ambiguity-aversion p ar ameters. As such, this implies that the optimal str ate gie s ar e determine d in p a rt by the ambigui ty-aversion p ar ameters. 9 Theorem 3.4. Supp ose γ 1 ∈ (0 , 1) exists, ( 3.3 ) holds, and N 1 6 = N 3 . We have the fol lowing r esults: (i) w 0 = min { w 1 , w 2 } and b ∗ define d i n ( 3.7 ) satisfies b ∗ = inf { x > w 0 : v ( x ) 2 + v ′ ( x ) = 0 } , (3.8) wher e v ( x ) = N 1 N 1 − N 3 · K 3 γ 2+ e γ 2+ x + γ 2 − e γ 2 − x K 3 e γ 2+ x + e γ 2 − x , K 3 = 1 − N 3 N 1 γ 1 w 0 − γ 2 − γ 2+ − 1 − N 3 N 1 γ 1 w 0 e ( γ 2 − − γ 2+ ) w 0 , γ 2 ± = − N 2 ± p N 2 2 + 4 δ ( N 1 − N 3 ) 2 N 1 . (3.9) (ii) The function g define d by g ( x ) = a 2 v ( b ∗ ) h K 3 e γ 2+ w 0 + e γ 2 − w 0 K 3 e γ 2+ b ∗ + e γ 2 − b ∗ i N 1 N 1 − N 3 x w 0 γ 1 if x < w 0 , a 2 v ( b ∗ ) h K 3 e γ 2+ x + e γ 2 − x K 3 e γ 2+ b ∗ + e γ 2 − b ∗ i N 1 N 1 − N 3 if w 0 ≤ x < b ∗ , a 2 x − b ∗ + 1 v ( b ∗ ) if x ≥ b ∗ , (3.10) is a classic al solution to the H JB e quation in ( 2.3 ) and thus is e qual to the value function V of the optimization pr oblem in ( 2.2 ) . M or e over, g is incr e asing and c onc ave as hyp othesize d. (iii) The optimal r ei nsu r anc e and distortion str ate gy is a fe e db ack str at e gy of the f orm ( π ∗ 1 , π ∗ 2 , θ ∗ 1 , θ ∗ 2 )( t ) = ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( X u ∗ ( t )) wher e ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( x ) = x w 1 , x w 2 , β 1 σ 1 γ 1 w 1 , β 2 σ 2 γ 1 w 2 if x < w 0 , w 0 w 1 , w 0 w 2 , β 1 σ 1 w 0 w 1 v ( x ) , β 2 σ 2 w 0 w 2 v ( x ) if w 0 ≤ x < b ∗ , w 0 w 1 , w 0 w 2 , β 1 σ 1 w 0 w 1 ( x − b ∗ + v ( b ∗ ) − 1 ) , β 2 σ 2 w 0 w 2 ( x − b ∗ + v ( b ∗ ) − 1 ) if x ≥ b ∗ . (3.11) Mor e o ver, the optima l dividend-c ap ital inje ction str ate gy is ( C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ) , which is a b arrier str ate gy with a b arrier b ∗ define d i n Definition 2.3 . Remark 3.5. W e first highlight the signi fic anc e of the assumption ( 3.3 ) . T o gether with the definitio n of w 0 , it is g uar ante e d that ¯ π 1 ( x ) ∈ [0 , 1] and ¯ π 2 ( x ) ∈ [0 , 1] . In p articular, this ensur es that the optimal r ei nsur anc e str ate gies ar e admissible. Next, we discuss the optimal r einsu r anc e str ate gies ( π ∗ 1 , π ∗ 2 ) . If w 0 = w 1 , then Line 2 c e des a pr op ortion 1 − w 0 w 2 of the risk to the r einsur er wh en the aggr e gate r eserve level exc e e ds the r einsur anc e th r eshold leve l x = w 0 . If w 0 = w 2 , Li ne 1 c e des a pr o p ortion 1 − w 0 w 1 of the risk to the r einsur er. F or the optimal distortion c o ntr ols ( θ ∗ 1 , θ ∗ 2 ) , we c an se e that the distortion c ontr ols ar e c onstant when b oth lines stil l c e de their risk to the r einsur er (i.e., x < w 0 ). F r om R emark 6.4 , v ( x ) is de cr e asing, which implies that θ ∗ 1 and θ ∗ 2 ar e de cr e asing. This me ans that higher aggr e gate r eserve levels imply that the optimal alt ernative mo del b e c omes closer to the r efer e nc e mo d el. R e c al l that the existenc e of γ 1 ∈ (0 , 1) is e qui v alent to δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . The c onditions δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 and N 1 6 = N 3 ar e analo gous to the c onditions of Case 2 in F eng e t al. ( 2021 ). With the assumption that ( 3.3 ) holds, a sufficient c ond ition for N 1 6 = N 3 is that b oth β 1 ≤ 1 and β 2 ≤ 1 must hold. Theorem 3.6. Supp ose γ 1 ∈ (0 , 1) exists, ( 3.3 ) holds, and N 1 = N 3 . We have the fol lowing r esults: 10 (i) w 0 = min { w 1 , w 2 } and b ∗ define d i n ( 3.7 ) satisfies b ∗ = inf { x > w 0 : v ( x ) 2 + v ′ ( x ) = 0 } , (3.12) wher e v ( x ) = δ N 2 1 − e − N 2 N 1 ( x − w 0 ) + γ 1 w 0 e − N 2 N 1 ( x − w 0 ) . (3.13) (ii) The function g , define d b y g ( x ) = a 2 v ( b ∗ ) e v 1 ( b ∗ ) x w 0 γ 1 if x < w 0 , a 2 v ( b ∗ ) e v 1 ( x ) − v 1 ( b ∗ ) if w 0 ≤ x < b ∗ , a 2 x − b ∗ + 1 v ( b ∗ ) if x ≥ b ∗ , (3.14) wher e v 1 ( y ) = δ N 2 ( y − w 0 ) − N 1 N 2 γ 1 w 0 − δ N 2 e − N 2 N 1 ( y − w 0 ) − 1 is a classic al solution to the H JB e quation in ( 2.3 ) an d th us is e q ual to the value function V of the optimization pr oblem in ( 2.2 ) . M or e over, g is incr e asing and c onc ave as hyp othesize d. (iii) The optimal r ei nsu r anc e and distortion str ate gy is a fe e db ack str at e gy of the f orm ( π ∗ 1 , π ∗ 2 , θ ∗ 1 , θ ∗ 2 )( t ) = ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( X u ∗ ( t )) , wher e ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( x ) is of the sa me for m as ( 3.11 ) . Mor e over, the optimal dividend-c apital inje ction str at e gy is ( C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ) , which is a b ar rier str ate gy with a b arrier b ∗ define d i n Definition 2.3 . Remark 3.7. We observe that the optima l r einsur anc e and distortion str ate g ies b etwe en The or ems 3.4 and 3.6 ar e similar, and thus the e xplanations in R emark 3.5 also apply to this c ase, exc ep t that The or em 3.6 ’s c onditions ar e analo gous to the c onditio ns of Case 1 i n F eng et al. ( 2021 ). Theorem 3.8. Supp ose ψ ( z ) = 0 do es not have a solution on (0 , 1) . We have the fol lowing r esults: (i) w 0 do es not exi st and b ∗ = 0 . (ii) The function g , define d by g ( x ) = a 2 x , x ≥ 0 is a classic al solution to the HJB e quation in ( 2.3 ) and thus is e q ual to the value function V of the optimization pr oblem i n ( 2.2 ) . (iii) The op timal dividend -c apital inje ction str ate g y is ( C 1 , 0 , C 2 , 0 , L 1 , 0 , L 2 , 0 ) , which is a b arrier str ate gy with a b arrier 0 define d in Definition 2.3 ; that is, Line 2 p ays al l o f the aggr e gate r eserve as dividends at time t = 0 and ruin o c curs imme diat ely. Conse que ntly, the optimal r einsur anc e and distortion str ate gies b e c ome irr elev ant. Remark 3.9. The c ond ition of The or em 3.8 is satisfie d i f any of the fol lowing c onditions hold: (i) the disc ount r ate δ is lar ge enough; (ii) the adjuste d me ans µ 1 and µ 2 ar e smal l enough; (iii) the volatilities σ 1 and σ 2 ar e lar ge enough; or (iv) the (adjuste d) r obustness pr efer e nc e p ar ameters β 1 and β 2 ar e lar ge enough. Al l of these c onditions imply that the i nsur er must imme diately p ay al l of the r eserves fr om b oth lines as dividends at time t = 0 and ruin o c curs. When the disc ount r ate δ is sufficiently lar ge, the pr esent value of futu r e dividend p ayments b e c omes smal ler, making imme d iate dividend p ayout mor e advantage ous. If the adjuste d me ans µ i ar e low enough, the r eserve pr o c ess has smal ler gr owt h, justifying the ne e d for imme d iate dividend p ayout. Mor e over, if the vola tilities σ i ar e high enough, the likeliho o d of ruin incr e ases, which supp orts the imme diate distr ibution of dividends. L ast ly, if the (adjuste d) r obustness pr efer enc e p ar ameters (or ambiguity-aversion p a r ameters) β i ar e lar ge enough, it indic ates a lack of trust in the r ef er enc e mo del, signaling the insur er to p ay dividends imme diately. 11 3.2 Remaining cases In this section, we discus s the remaining cases that ha v e not b een cov ered in Section 3.1 . W e state the main r esults dir ectly since the tec hniques and analysis are similar to those in the main case. Recall that we consider ( 3.3 ) in Section 3.1 . First, w e no w consider the follo wing condition: ρ 1 + β 2 γ 1 1 − γ 1 > µ 1 /σ 1 µ 2 /σ 2 > 0 . (3.15) F rom ( 3.2 ) and ( 3.15 ), w e ha v e b π 1 ( x ) ≤ 0 and b π 2 ( x ) ≥ 0 f or x ≥ 0. As suc h, with the constraint π i ∈ [0 , 1], it m ust hold that ¯ π 1 ( x ) = 0 for all x ≥ 0, imp lying that Line 1 cedes all of its risk to the reinsu r er. Prop osition 3.10. D efine w 0 such that i t satisfies b π 2 ( w 0 ) = 1 and define N 1 := 1 2 σ 2 2 , N 2 := µ 2 , N 3 := 1 2 β 2 σ 2 2 , e A ( z ) := [ ρ 2 µ 2 1 σ 2 2 + µ 2 2 σ 2 1 (2 ρ 2 − 1) − 2 ρ 3 µ 1 µ 2 σ 1 σ 2 ] z ( z − 1) 3 − µ 2 2 σ 2 1 ( β 2 1 + 2 β 1 β 2 ) z 3 ( z − 1) + [ µ 2 2 σ 2 1 (2 β 1 + β 2 − 2 ρ 2 β 1 ) − ρ 2 β 2 µ 2 1 σ 2 2 ] z 2 ( z − 1) 2 + β 2 1 β 2 µ 2 2 σ 2 1 z 4 . (3.16) F urthermor e, let γ 1 b e the solution of the e quation ψ 1 ( z ) := e A ( z ) − 2 δσ 2 1 σ 2 2 e B ( z ) = 0 on (0 , 1) , wher e e A ( z ) is given by ( 3.16 ) and e B ( z ) is give n by ( 3.4 ) . We have the f ol lowing r esults: (i) Supp ose γ 1 ∈ (0 , 1) exists, ( 3.15 ) holds, and β 2 6 = 1 . Then, w 0 e quals w 2 define d in ( 3.5 ) , b ∗ satisfies The or em 3.4 (i), and the value function e quals g define d in ( 3.10 ) . M or e over, the optima l r einsur anc e and distortion str ate gy is a fe e db ack str ate gy given by ( π ∗ 1 , π ∗ 2 , θ ∗ 1 , θ ∗ 2 )( t ) = ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( X u ∗ ( t )) , wher e ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( x ) = 0 , x w 2 , 0 , β 2 σ 2 γ 1 w 2 if x < w 0 , (0 , 1 , 0 , β 2 σ 2 γ 1 v ( x )) if w 0 ≤ x < b ∗ , 0 , 1 , 0 , β 2 σ 2 x − b ∗ + v ( b ∗ ) − 1 if x ≥ b ∗ , (3.17) wher e v ( x ) is define d in ( 3.9 ) , while the optimal dividend-c apital inje ction str ate gy is a b arrier str a te gy with a b a rrier b ∗ . (ii) Supp ose γ 1 ∈ (0 , 1) exists, ( 3.15 ) holds, and β 2 = 1 . Then, w 0 e quals w 2 define d in ( 3.5 ) , b ∗ satisfies The or em 3.6 (i), and the value function e quals g define d in ( 3.14 ) . M or e over, the optimal r einsur anc e and disto rtion str ate gy is a fe e db ack str ate gy given by ( π ∗ 1 , π ∗ 2 , θ ∗ 1 , θ ∗ 2 )( t ) = ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( X u ∗ ( t )) , wher e ( ¯ π 1 , ¯ π 2 , ¯ θ 1 , ¯ θ 2 )( x ) is given by ( 3.17 ) with v ( x ) define d in ( 3.13 ) , while the optimal dividend-c apital inje ction str ate gy is a b arrier str at e gy with a b arrier b ∗ . (iii) Supp ose ψ 1 ( z ) = 0 do es not have a solution on (0 , 1) . Then, the value function e quals g ( x ) = a 2 x and the optimal dividend-c apital inje ction str ate g y is a b ar rier str a te gy with a b arrier b ∗ = 0 . The optimal r einsur a nc e and distortion str ate gies b e c ome irr elevant. Remark 3.11. Sinc e Line 1 c e des al l of its risk to the r einsu r er, the insur er fo cuses on managing the risk of Line 2. The pr oblem is then r e duc e d to just one line. The optimal str ate gie s ar e similar to those in F eng et al. ( 2021 ). Second, w e consider the follo wing condition: µ 1 /σ 1 µ 2 /σ 2 > 1 + β 1 γ 1 1 − γ 1 ρ > 0 . 12 In this case, b π 2 ( x ) ≤ 0 and b π 1 ( x ) ≥ 0 for all x ≥ 0. Thus, it follo ws that π ∗ 2 ≡ 0. Moreo ver, w 0 satisfies b π 1 ( w 0 ) = 1. Th is case is symmetric to Prop osition 3.10 . Now, Lin e 2 cedes all of its risk to th e r eins urer. Th e optimal strategies are obtained from Pr op osition 3.10 by exc hanging the ind ices 1 and 2, i.e. , ( µ 1 , σ 1 , β 1 ) ↔ ( µ 2 , σ 2 , β 2 ) and ( π 1 , θ 1 ) ↔ ( π 2 , θ 2 ). Last, we consid er the case wh ere − 1 < ρ ≤ 0. In this case, it alw a y s holds that b π 1 ( x ) > 0 and b π 2 ( x ) > 0 for all x > 0. T h us, the analysis follo ws from the one in S ection 3.1 using the same v alues for N 1 , N 2 , and N 3 defined in ( 3.6 ), and the same fu nction e A ( z ) defin ed in ( 3.4 ). Remark 3.12. Th e r a tio µ i /σ i c an b e interpr ete d as a tr ade-off b etwe en the adjuste d me a n of the risk exp osur e and the volatility of the risk exp osur e. Henc e, we c an interpr et µ 1 /σ 1 µ 2 /σ 2 as the r e lative Sharp e r atio of Line 1 over Line 2. A smal l value of this r a tio indic ates a mor e favor able tr ade-off for Line 2, which aligns with the c ase wher e ( 3.15 ) holds. On the other hand, a lar ge value of the r atio implies a mor e advantage ous tr ade-off for Line 1. However, when ρ ≤ 0 , this r a tio b e c omes less r elevant sinc e having a non-p ositive c orr elation pr ovides a he dging eff e ct or diversific ation b enefits. 4 The Case of No Mo del Uncertain t y In the case where e β 1 = e β 2 = 0 (or, equiv alen tly , β 1 = β 2 = 0), the insurer is con vince d that the “true” mo del is the reference m o del P and an y deviation from P incur s an infinite p enalt y due to the second term in ( 2.2 ). Hence, Q θ ∗ should b e c hosen as P , whic h yields θ ∗ 1 ( t ) = θ ∗ 2 ( t ) ≡ 0 to guarantee that the second term in ( 2.2 ) v anishes. T h e optimization pr oblem then degenerates to the pr oblem with no mo del un certain t y giv en b y: V ( x 1 , x 2 ) = sup u ∈U E P " 2 X i =1 a i Z τ u 0 e − δt d C i ( t ) # . (4.1) W e call the ins u rer in this case am biguit y neutral. If the insur er is ambiguit y n eutral, the HJB equation ( 2.3 ) is reduced to sup ( sup π i ∈ [0 , 1] L ϑ ( g )( x ) , a 1 − g ′ ( x ) , a 2 − g ′ ( x ) ) = 0 , (4.2) with b ound ary condition g (0) = 0. Here, ϑ = ( π 1 , π 2 , 0 , 0). W e n o w present th e results for the case w here the insu rer is am biguit y neutr al. This serves as a “b enc hmark” for comparing the r esults where mo d el u ncertain t y is present. By a sta ndard verificat ion lemma ( see, for instance, Højgaard and T aksar , 1999 , Section 3.3), a classical solution to the HJ B equation ( 4.2 ) is the s olution to the v alue function ( 4.1 ). Theorem 4.1. Supp ose β 1 = β 2 = 0 and the c orr elation ρ satisfies e ither 0 < ρ ≤ µ 1 /σ 1 µ 2 /σ 2 ≤ 1 ρ or − 1 < ρ ≤ 0 . The fol lowing r e sults then hold: (i) w 0 = min { w 1 , w 2 } and b ∗ define d i n ( 3.7 ) is given by b ∗ = w 0 + 1 γ 2+ − γ 2 − ln − γ 2 − γ 2+ , (4.3) wher e γ 2 ± is define d i n ( 3.9 ) and γ 1 is gi ven by γ 1 = 2 δ σ 2 1 σ 2 2 (1 − ρ 2 ) ( µ 1 σ 2 − µ 2 σ 1 ) 2 + 2(1 − ρ ) µ 1 µ 2 σ 1 σ 2 + 2 δ σ 2 1 σ 2 2 (1 − ρ 2 ) . (4.4) 13 (ii) The function g define d by g ( x ) = 2 λ (1 − γ 1 ) w 0 x w 0 γ 1 if x < w 0 , − λ γ 2 − e γ 2+ ( x − w 0 ) + γ 2+ e γ 2 − ( x − w 0 ) if w 0 ≤ x < b ∗ , a 2 x − b ∗ + N 2 δ if x ≥ b ∗ , (4.5) wher e λ = − a 2 γ 2+ γ 2 − h e γ 2+ ( b ∗ − w 0 ) + e γ 2 − ( b ∗ − w 0 ) i − 1 (4.6) is a classic al solution to the H JB e quation in ( 4.2 ) an d th us is e q ual to the value function V of the optimization pr oblem in ( 4.1 ) . M or e over, g is incr e asing and c onc ave. (iii) The optimal r einsur anc e str ate gy is a f e e d b ack str a te gy giv en by ( π ∗ 1 , π ∗ 2 )( t ) = ( ¯ π 1 , ¯ π 2 )( X u ∗ ( t )) , wher e ( ¯ π 1 , ¯ π 2 )( x ) = x w 1 , x w 2 if x < w 0 , w 0 w 1 , w 0 w 2 if x ≥ w 0 . (4.7) Mor e o ver, the optima l dividend-c ap ital inje ction str ate gy is ( C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ) , which is a b arrier str ate gy with a b arrier b ∗ define d i n Definition 2.3 . Remark 4.2. The analysis f or the oth er c ases involving the c orr elation c o efficie nt fol lows similarly as tho se in Se ction 3.2 . Mor e over, the r esults pr esente d in The or em 4.1 ar e analo gous to the r esults i n the univaria te fr amework pr esente d in Højgaar d and T aksar ( 1999 ). 5 Numerical Illustrations In th is sect ion, w e pro vide numerical illustrations of the an alytical solutions established ab o v e. Th e exam- ples b elo w fo cus on the effect of m o del un certain t y (via th e am biguity-a ve rsion parameters) on the insu r er’s optimal strategies and how mo d el uncertain t y inte racts with the riskin ess of eac h bu s iness line’s reserve p ro- cess (measured b y σ 1 and σ 2 ) in influencing the optimal strategies. Unless otherwise stated, a ll numerical illustrations are generated using the p arameter v alues sp ecified in T able 1 . T able 1: Base parameter v alues used for all n umerical illustrations. µ 1 4.00 µ 2 2.00 ρ 0.60 σ 1 1.50 σ 2 1.00 δ 0.50 a 2 0.70 β 1 1.00 β 2 1.00 Figures 2 and 3 show the v alue fu nction g ( x ), optimal reinsur an ce strategies ¯ π 1 ( x ) and ¯ π 2 ( x ), and the optimal distortion strategies ¯ θ 1 ( x ) and ¯ θ 2 ( x ) as a fu nction of the (total) reserve x = X u ∗ ( t ) un der Th eorems 3.4 and 3.6 , resp ectiv ely . As exp ected, the v alue fun ction in b oth case s is strictly increasing and conca ve with resp ect to the v alue of the underlying reserve pro cess. T o ensure th e cond ition N 1 = N 3 in T heorem 3.6 is satisfied, w e set ρ = 0 given the parameters sp ecified in T able 1 . In th is case, the results in Figures 2 and 3 also illustrate the effect of a nonzero correlation wh en all ot her parameters are fix ed . In ad d ition to the optimal distortion strategies, w e also sho w the rate of change of the relativ e entrop y of the w orst-case probabilit y measure Q θ ∗ with resp ect to P . In b oth fi gures, the insurer tends to linearly increase the p rop ortion of r isk retained for b oth lines as th e underlying reserv e pro cess v alue increases. In the illustration of Theorem 3.4 in Figure 2 , once the reserv e pro cess reac hes a v alue of w 0 (from b elo w), the insurer will retain all the risks asso ciated with Line 1 and 14 will cease ceding ad d itional r isk from Line 2 to the reinsu r er. How eve r, und er the conditions of Theorem 3.6 illustrated in Figure 3 , the threshold w 0 is smaller, indicating that the insu rer will completely absorb the risk at a lo w er reserve lev el. In con t rast to Figure 2 , the insurer in Figure 3 will r etain all the risks associated with Line 2. F u rthermore, the insu rer will absorb a greater prop ortion of th e reinsured line in Figure 3 (Line 1) compared to Fig ure 2 (Line 2). The v alue of b ∗ is also smaller in Figure 3 compared to Figure 2 , indicating that the insu rer will decide to p ay out dividends and transfer capital from one line to another for a smaller v alue of the u nderlying reserv e pro cess. w0 b* 0 2 4 6 0.0 0.5 1.0 1.5 2.0 2.5 x g ( x ) w0 b* 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x π 1 ( x ) , π 2 ( x ) Line 1 Line 2 w0 b* 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x θ 1 ( x ) , θ 2 ( x ) Entropy Rate Line 1 Line 2 Figure 2: V alue function g ( x ), o ptimal reinsurance strateg ies ¯ π 1 ( x ) , ¯ π 2 ( x ), and optimal distortion stra tegies ¯ θ 1 ( x ) , ¯ θ 2 ( x ) as a function of the (total) r eserve x when ρ = 0 . 60. This para meter configura tion, cor resp onding to Theorem 3.4 , yields w 0 = 0 . 6 7 < b ∗ = 1 . 9 5. w0 b* 0 2 4 6 8 0.0 0.5 1.0 1.5 2.0 2.5 x g ( x ) w0 b* 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x π 1 ( x ) , π 2 ( x ) Line 1 Line 2 w0 b* 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x θ 1 ( x ) , θ 2 ( x ) Entropy Rate Line 1 Line 2 Figure 3: V alue function g ( x ), o ptimal reinsurance strateg ies ¯ π 1 ( x ) , ¯ π 2 ( x ), and optimal distortion stra tegies ¯ θ 1 ( x ) , ¯ θ 2 ( x ) as a function of the (total) re s erve x when ρ = 0 . This parameter configur ation, cor resp onding to Theore m 3.6 , yie lds w 0 = 0 . 5 0 < b ∗ = 1 . 8 6. The optimal distortion p r o cesses θ ∗ 1 ( t ) = ¯ θ 1 ( X u ∗ ( t )) and θ ∗ 2 ( t ) = ¯ θ 2 ( X u ∗ ( t )) determine how far the worst- case pr obabilit y measure Q θ ∗ is from the reference pr ob ab ility measure P . Since the distance, measured by the relativ e en trop y of Q θ ∗ with resp ect to P , is obtained by integrati ng the optimal distortion p ro cesses o v er time, w e instead in v e stigate th e rate of c hange of the relativ e en trop y , which is giv en b y d d t E Q θ ∗ log d Q θ ∗ d P F t = 1 2 ( ¯ θ 1 ( X u ∗ ( t )) 2 + ( ¯ θ 2 ( X u ∗ ( t )) − ρ ¯ θ 1 ( X u ∗ ( t ))) 2 1 − ρ 2 . The r ate of c hange allo ws us to examine ho w fast the w o rst-case model Q θ ∗ is mo vin g a w a y f rom the reference mo del P with resp ect to the curr ent v alue of the under lyin g reserv e pro cess. In b oth Fig ures 2 and 3 , the rate of c h ange is constan t as long as th e r eserv e p ro cess is less th an w 0 . Once the reserv e pro cess excee ds w 0 and the insurer has absorb ed all th e risk from at least one line, the rate of change of the relativ e entrop y monotonically decreases as the reserve pro cess in cr eases. T h is indicates th at the r elativ e en trop y b ecomes less sensitive to further increase s in the underlyin g r eserv e v alue. Und er the conditions of 15 Theorem 3.6 , the optimal distortion pro cesses and th e r ate of c hange of relativ e entrop y are greate r than their corresp onding v al ues under the conditions of Theorem 3.4 , indicating that a strictly p ositiv e ρ can result in a w orst-case mo d el that mov es faster a wa y from the reference mo d el (assuming all other mo d el parameters are the same). How ever, these results do not quant ify the actual relativ e en trop y , or distance, b et w een the w orst-case mo del an d the r eference mo del without kno wledge of the tra jectory of the reserv e p ro cess { X u ∗ ( t ) } t ≥ 0 under the optimal strategies. A B 35.56 0 5 10 15 20 0 10 20 30 40 β 1 w 0 , w 1 , w 2 w0 w1 w2 (a) β 2 = 5 fixed A B 2 4 6 8 0 10 20 30 40 β 2 w 0 , w 1 , w 2 w0 w1 w2 (b) β 1 = 5 fixed Figure 4 : Reinsurance threshold w 0 and v alues of w 1 and w 2 as a function of β i when β 3 − i = 5 is fixed. In Figur e 4a (resp. Figure 4b ), the region A to the left of the dotted graph repr esents the v alues of β 1 (resp. β 2 ) for which w 2 > w 1 (resp. w 1 > w 2 ). The reg ion B to the rig h t of the do tted gr a ph repres e n ts v a lues of β 1 (resp. β 2 ) for which w 1 > w 2 (resp. w 2 > w 1 ). When β 1 is v a riable, the dot-dashed gra ph indicates the upp er b ound o n β 1 up to which w 0 exists. Figure 4 illustrates the zero-reinsurance thr eshold w 0 and the v alues of w 1 and w 2 as a function of the (scaled) robustness p r eference/am b iguit y-a ve rsion p arameter β i of Line i when β 3 − i = 5 is fi xed, for i = 1 , 2. Note that the v alue at whic h β i is fixed is chosen to illustrate the switching of w 0 b et w een w 1 and w 2 as β 3 − i v aries. In Figure 4a (resp . Figure 4b ), the dotted graph represents th e p oin t at whic h w 0 switc hes f r om the v alue of w 1 to w 2 (resp. w 2 to w 1 ). In Figure 4a , when L ine 1 exhibits a relativ ely lo w am b iguit y a version, w e ha v e w 0 = w 1 . T h is means that w hen the current reserv e v alue h as exceeded the threshold w 0 , Lin e 1 retains its enti re risk, whereas Line 2 cedes a pr op ortion 1 − w 0 w 2 of its risk to the reinsu rer. Ho wev er, when Lin e 1 has a high degree of am biguit y a v ersion, we hav e w 0 = w 2 . Th is means that if the curren t reserv e exceeds the threshold w 0 , Line 2 retains its entire risk, w hile Line 1 cedes a prop ortion 1 − w 0 w 1 of the line’s risk. In other w ords, Line 1 prefers to absorb some of its risk wh en the degree of trust in the reference mo del is lo w. The same in terpretation applies to the resu lts sho wn in Figure 4b . Similarly , Figure 5 illustrates the impact of mod el uncertain t y (via the am biguit y-av ersion parameters) on the optimal barr ier b ∗ for the dividen d p a y out and capital inj ection strategies. In Figure 5a , as seen also in Figure 4a , there exists a nonzero b ∗ only up to a certain v a lue of β 1 ; giv en the parameter v alues assu med, the upp er b ound on β 1 is app ro ximatel y 35.56. Th e b eha vior of b ∗ as either β 1 or β 2 increases is n otably non-monotonic (note th at this b eha vior is also ap p aren t in Figure 6b b elo w). With β 2 = 5 fixed, the barrier increases a s β 1 approac hes β 2 (from b elo w); that is, if the t w o lines ha v e approxima tely the same degree of am biguit y a v ersion, the in surer is willing to p a y dividends past a higher level of reserves. Ho w e v er, if there is a large d iscrepancy b et w ee n th e am biguit y a v ersion of the tw o lines, th e insurer is lik ely to pa y divid ends at a lo w er reserv e lev el. In the more extreme case of misalignmen t when β 1 exceeds a v alue of 35.56, it will b e optimal for the ins urer to pay out dividends immediately . As men tio ned ab o v e, giv en the assumed p arameter v alues, a n onzero v alue of b ∗ exists for an y β 2 and so it is optimal for the insu rer to pay dividends only when the reserv e exceeds b ∗ . W e also note in Figure 5b that as β 1 approac hes the upp er b oun d, the v alues of b ∗ 16 and w 0 approac h one another, since the ratio w 0 /b ∗ approac hes 1. This means that if Line 1 b ecomes more am biguit y a v erse (up to the computed upp er b ound), it is optimal for the insu rer to en gage in zero reinsu rance for at least one line and to pay dividends when the underlying reserv e v alue exceeds the same quanti t y . 35.56 0 1 2 3 0 10 20 30 40 β 1 , β 2 b ∗ beta1 beta2 (a) b ∗ 35.56 0.00 0.25 0.50 0.75 1.00 0 10 20 30 40 β 1 , β 2 w 0 b ∗ beta1 beta2 (b) w 0 /b ∗ Figure 5: The barrier b ∗ corres p onding to the o ptimal div idend-capital injection stra tegy a nd the ratio w 0 /b ∗ as a function of β i when β 3 − i = 5 is fixed, for i = 1 , 2. The legend indicates which parameter is v ariable. When β 1 is v ariable, the dot-dashed gr aph indicates the upper bound o n β 1 up to which either w 0 exists or b ∗ is nonzero . 0 10 20 30 40 0 10 20 30 40 β 1 β 2 w 0 1 2 3 4 5 (a) w 0 0 10 20 30 40 0 10 20 30 40 β 1 β 2 b ∗ 2 3 4 5 6 (b) b ∗ Figure 6: Contour plot of the reinsur ance thre s hold w 0 and the optimal bar r ier b ∗ as a function of the a m biguit y-av ersion parameters β 1 and β 2 . Unshaded p ortions r epresent the r egions where w 0 do es not exist or where b ∗ = 0 . Figure 6 p ro vides insights on ho w the zero-reinsurance threshold w 0 and optimal barrier b ∗ b eha v e with resp ect to b oth β 1 and β 2 . W e note th at w 0 tends to b e insensitive to c hanges in the am biguit y a v ersion of Line i if the am biguit y av ersion of L ine 3 − i is lo w ( i = 1 , 2). This means that any asymmetry in the lines’ am biguit y a v ersion, if one of the lines is not to o am biguit y a v erse, does n ot signifi cantly influ ence the ins urer’s decision to ce ase reinsurance for at least one line. I n the same situation, as seen in Figure 5a , the optimal barrier tends to p eak when th e am b iguit y-a ve rsion parameters align, but sligh tl y decreases as the discrepancy increases. Ho w ever, if Line i is alrea dy highly ambiguit y av erse and if th e ambiguit y av ersion of Line 3 − i increases, it b ecomes more likely that the insurer will retain all risks from at least one line or p a y dividends immediately . Both w 0 and b ∗ tend to r ap id ly increase when β 1 and β 2 increase together (i. e., alo ng the 45 ◦ line), indicating that the insur er, as a whole, will co nsider cea sing reinsurance or pa yin g out dividends at a higher lev el of reserve s if b oth lines b ecome more am biguit y a v erse. 17 0 2 4 6 8 0.0 0.5 1.0 1.5 2.0 2.5 x g ( x ) ( β 1 , β 2 ) : ( 0 , 0 ) ( 0 , 1 ) ( 1 , 0 ) ( 1 , 1 ) 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x π 1 ( x ) ( β 1 , β 2 ) : ( 0 , 0 ) ( 0 , 1 ) ( 1 , 0 ) ( 1 , 1 ) 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x π 2 ( x ) ( β 1 , β 2 ) : ( 0 , 0 ) ( 0 , 1 ) ( 1 , 0 ) ( 1 , 1 ) Figure 7: V alue function g ( x ) and optimal reins ur ance strateg ies ¯ π 1 ( x ) , ¯ π 2 ( x ) for v a rious v alues of β 1 and β 2 , illustrating the impact of model uncertaint y . T able 2: Impa ct o f the ambiguity-a v ersion pa rameter (and mo del uncertaint y) on the reinsurance thresho ld w 0 and the optimal barr ier b ∗ . β 1 β 2 w 0 b ∗ 0 0 0.576260 9 1.6348 25 1 0 0.713330 3 2.1189 44 0 1 0.547960 3 1.6410 18 1 1 0.674445 3 1.9519 39 Next, we exa mine the v alue function and the optimal reinsu rance strategie s u nder four scenarios: (i) b oth lines are ambiguit y neu tral; (ii) and (iii) one line is ambiguit y a v erse and th e other line is ambiguit y neutral; and (iv) b oth lines are ambiguit y a v erse (see Figure 7 ). These results capture the imp act of ignorin g mo d el uncertain t y on the insur er’s we lfare (measured by the v alue fun ction) and reinsu rance strategies. In all four scenarios, it is optimal for the insurer to in ternaliz e all the risk of Line 1 once th e under lyin g r eserv e v a lue reac hes w 0 (giv en in T able 2 ). Ho w ev er, w e note the asymmetry in the outcomes w hen exactl y one line is am biguit y a v erse. This is primarily due to th e assu med v a lues of µ i and σ i , so th e in surer’s d ecision to cease reinsurance or pa y out dividends under mo d el un certain t y is i nfluenced by the sp ecificatio n o f eac h line’s reserv e p ro cess. 1 When µ 1 = µ 2 and σ 1 = σ 2 , then the outcomes in s cenarios (ii) and (iii) are identi cal (see App end ix C ). Indeed, the r esults in App endix C are consisten t with those of F eng et al. ( 2021 ) who consider the un iv ariate case; du e to making decisions under the w ors t-case scenario when b oth lines (i.e., the ins u rer as a wh ole) are am biguit y a v e rse (and hen ce taking on a more conserv ative strategy), there is a decrease in the o v erall v alue function compared to when decisions are made un d er no ambiguit y a v ersion. Th us, these results highligh t that in the multiv ariate setting, the optimal strategies can d iffer drastically giv en a more granular approac h to managing mo del risk. Finally , Fi gures 8 and 9 illustrate the in teractio n b et w een am biguit y av ersion and the r isk in ess of eac h line’s reserv e pr o cess (captured by σ 1 and σ 2 ) and how the in teractio n affects the reinsurance threshold w 0 and optimal barrier b ∗ for the (optimal) dividend pa y out and capital injectio n strateg ies. When b oth lines are am biguit y neutral (i.e., β 1 = β 2 = 0), th er e exist non trivial w 0 and b ∗ for all v alues of σ 1 and σ 2 considered. F urthermore, the b eha vior of w 0 and b ∗ with resp ect to σ 2 when σ 1 is fi xed (say at σ 1 = 2) do es n ot ap p ear to b e monotonic; w 0 and b ∗ tend to increase as σ 2 increases from 0, but once a sufficien tly high lev el of σ 2 is attained, the v alues of w 0 and b ∗ tend to decrease as σ 2 increases b ey ond this lev el. In this case, h igh risk in b oth lines is m anaged thr ough a combinatio n of reinsurance, dividend p a ymen t, and capital injection. In con trast, wh en b oth lines are am biguit y a v erse ( β 1 = β 2 = 1), Line 2 will immediately pa y the aggregate 1 W e note that there is no w a y to kn o w a p riori which scenario will yield th e highest v alue function b ased on µ i and σ i . 18 0 2 4 6 8 0 2 4 6 8 σ 1 σ 2 w 0 1 2 3 4 (a) w 0 0 2 4 6 8 0 2 4 6 8 σ 1 σ 2 b ∗ 2.5 5.0 7.5 (b) b ∗ Figure 8: C o nt our plot of the r einsurance thr eshold w 0 and the optimal bar rier b ∗ as a function of σ 1 and σ 2 when β 1 = β 2 = 0 (i.e., both lines are am biguit y neutral). Here, we assume ρ = 0 to ensure the conditions of Theor em 4.1 ar e satisfied. 0 2 4 6 8 0 2 4 6 8 σ 1 σ 2 w 0 1 2 3 4 5 (a) w 0 0 2 4 6 8 0 2 4 6 8 σ 1 σ 2 b ∗ 2 4 6 (b) b ∗ Figure 9: C o nt our plot of the r einsurance thr eshold w 0 and the optimal bar rier b ∗ as a function of σ 1 and σ 2 when β 1 = β 2 = 1 (i.e., b oth lines are ambiguit y av erse). Here, we ass ume ρ = 0 to compare with Figure 8 . reserv e as dividend s at time t = 0 and ruin w ill occur immediately after for sufficien tly high lev els of risk (refer to the blank region in Figure 9b ). Likewise, optimal reinsurance b ecomes irrelev an t when the risk in b oth lines is sufficientl y high. Thus, wh en the insurer exhibits some d egree of distrus t in the r eference m o del, high risk in b oth lines’ reserve pro cesses b ecomes a signal to pa y dividends immediately . 6 Pro of of Main Results 6.1 Pro of of Lemma 3.2 (P art I “ ⇐ =”) W e first p ro v e the “if” direction. Sup p ose δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 , whic h can b e rewritten as β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 > 0. W e ob tain ψ (0) = − 2 δ σ 2 1 σ 2 2 (1 − ρ 2 ) 2 < 0 and ψ (1) = β 1 β 2 ( β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δβ 1 β 2 σ 2 1 σ 2 2 ) > 0, wher e ψ ( z ) is defined in ( 3.4 ). The in termediate v alue theorem implies the existence of the solution of ( 6.3 ) on (0 , 1). (P art I I “= ⇒ ”) W e pr o v e th e “only if” direction u sing its cont rap ositiv e; that is, we sho w that ( 6.3 ) do es not ha v e a solution on (0 , 1) if δ ≥ µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . S upp ose now that δ ≥ µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 , whic h is equ iv alen t to β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 ≤ 0. It must b e noted that 0 ≥ β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 = β 2 σ 2 2 ( µ 2 1 − 2 δ β 1 σ 2 1 ) + β 1 µ 2 2 σ 2 1 = β 1 σ 2 1 ( µ 2 2 − 2 δ β 2 σ 2 2 ) + β 2 µ 2 1 σ 2 2 , whic h implies that µ 2 1 < 2 δ β 1 σ 2 1 and µ 2 2 < 2 δ β 2 σ 2 2 m ust b oth h old. W e then hav e ψ (0) < 0 and ψ (1) < 0. It 19 suffices to sho w that ψ ( z ) < 0 for all z ∈ (0 , 1). W e can rewrite ψ as ψ ( z ) = h 1 z 4 + h 2 z 3 ( z − 1) + h 3 ( z − 1) 4 + h 4 z ( z − 1) 3 + h 5 z 2 ( z − 1) 2 , where h 1 = β 1 β 2 ( β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 ) ≤ 0 , h 2 = − β 2 µ 2 1 σ 2 2 (2 β 1 + β 2 ) − β 1 µ 2 2 σ 2 1 ( β 1 + 2 β 2 ) + 2 β 1 β 2 µ 1 µ 2 σ 1 σ 2 + 4 δ β 1 β 2 ( β 1 + β 2 ) σ 2 1 σ 2 2 = − ( β 1 + β 2 )( β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 ) + 2 β 1 β 2 µ 1 µ 2 σ 1 σ 2 + β 1 β 2 [ σ 2 2 (2 δβ 1 σ 2 1 − µ 2 1 ) + σ 2 1 (2 δβ 2 σ 2 2 − µ 2 2 )] > 0 , h 3 = − 2 δ σ 2 1 σ 2 2 (1 − ρ 2 ) 2 < 0 , h 4 = ( µ 2 1 σ 2 2 + µ 2 2 σ 2 1 )(3 ρ + 1)( ρ − 1) + 2 µ 1 µ 2 σ 1 σ 2 (1 − ρ )(2 ρ 2 + ρ + 1) + 4 δ (1 − ρ 2 )( β 1 + β 2 ) σ 2 1 σ 2 2 > ( µ 2 1 σ 2 2 + µ 2 2 σ 2 1 )(3 ρ + 1)( ρ − 1) + 2 µ 1 µ 2 σ 1 σ 2 (1 − ρ )(2 ρ 2 + ρ + 1) + 2(1 − ρ 2 )( µ 2 1 σ 2 2 + µ 2 2 σ 2 1 ) = ( µ 2 1 σ 2 2 + µ 2 2 σ 2 1 )( ρ − 1) 2 + 2 µ 1 µ 2 σ 1 σ 2 (1 − ρ )(2 ρ 2 + ρ + 1) > 0 , h 5 = µ 2 1 σ 2 2 ( β 1 − 3 ρ 2 β 2 + 2 ρβ 2 + 2 β 2 ) + µ 2 2 σ 2 1 ( β 2 − 3 ρ 2 β 1 + 2 ρβ 1 + 2 β 1 ) − 2 µ 1 µ 2 σ 1 σ 2 ( β 1 + β 2 ) − 2 δ σ 2 1 σ 2 2 ( β 2 1 + 2 β 1 β 2 + β 2 2 ) − 4 δ σ 2 1 σ 2 2 (1 − ρ 2 ) β 1 β 2 < µ 2 1 σ 2 2 ( β 1 − 3 ρ 2 β 2 + 2 ρβ 2 + 2 β 2 ) + µ 2 2 σ 2 1 ( β 2 − 3 ρ 2 β 1 + 2 ρβ 1 + 2 β 1 ) − 2 µ 1 µ 2 σ 1 σ 2 ( β 1 + β 2 ) − ( β 1 + β 2 )( µ 2 1 σ 2 2 + µ 2 2 σ 2 1 ) − 4 δ σ 2 1 σ 2 2 (1 − ρ 2 ) β 1 β 2 = − β 2 µ 2 1 σ 2 2 ( ρ − 1) 2 − β 1 µ 2 2 σ 2 1 ( ρ − 1) 2 − 2 µ 1 µ 2 σ 1 σ 2 ( β 1 + β 2 ) + 2(1 − ρ 2 )( β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 ) < 0 . Since z ∈ (0 , 1), it holds that ψ ( z ) < 0, whic h completes the pro of. 6.2 Pro of of Theorem 3.4 In this section, we present the ke y resu lts used to obtain Theorem 3.4 . The discussion serves as the pro of for Theorem 3.4 . Supp ose γ 1 ∈ (0 , 1) exists, ( 3.3 ) holds, and N 1 6 = N 3 , as required in Theorem 3.4 . Recall that N 1 and N 3 are d efined in ( 3.6 ). Since γ 1 exists, then δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . W e conjecture that g satisfies g ′ ( x ) > a 2 for x < b ∗ and g ′ ( x ) = a 2 for x ≥ b ∗ . In the region { x < w 0 } , the HJB equation ( 2.3 ) b ecomes A ( x ) 2 σ 2 1 σ 2 2 B ( x ) − δ g ( x ) = 0 , (6.1) where A ( x ) := µ 2 1 σ 2 2 (3 ρ + 1)( ρ − 1) + µ 2 2 σ 2 1 (3 ρ + 1)( ρ − 1) + 2 µ 1 µ 2 σ 1 σ 2 (1 − ρ )(2 ρ 2 + ρ + 1) g ′′ ( x ) 3 g ′ ( x ) 2 g ( x ) 4 + − β 2 µ 2 1 σ 2 2 (2 β 1 + β 2 ) − β 1 µ 2 2 σ 2 1 ( β 1 + 2 β 2 ) + 2 β 1 β 2 µ 1 µ 2 σ 1 σ 2 g ′′ ( x ) g ′ ( x ) 6 g ( x ) 2 + µ 2 1 σ 2 2 ( β 1 − 3 ρ 2 β 2 + 2 ρβ 2 + 2 β 2 ) + µ 2 2 σ 2 1 ( β 2 − 3 ρ 2 β 1 + 2 ρβ 1 + 2 β 1 ) − 2 µ 1 µ 2 σ 1 σ 2 ( β 1 + β 2 )] g ′′ ( x ) 2 g ′ ( x ) 4 g ( x ) 3 + β 1 β 2 2 µ 2 1 σ 2 2 + β 2 1 β 2 µ 2 2 σ 2 1 g ′ ( x ) 8 g ( x ) , B ( x ) := [( β 1 + β 2 ) 2 + 2(1 − ρ 2 ) β 1 β 2 ] g ′′ ( x ) 2 g ′ ( x ) 4 g ( x ) 2 + (1 − ρ 2 ) 2 g ′′ ( x ) 4 g ( x ) 4 + β 2 1 β 2 2 g ′ ( x ) 8 − 2(1 − ρ 2 )( β 1 + β 2 ) g ′′ ( x ) 3 g ′ ( x ) 2 g ( x ) 3 − 2 β 1 β 2 ( β 1 + β 2 ) g ′′ ( x ) g ′ ( x ) 6 g ( x ) . W e use the ansatz g 1 ( x ) = K 1 x γ 1 , with K 1 > 0 and γ 1 ∈ (0 , 1), on ( 6.1 ) and obtain A ( x ) − 2 K 1 δσ 2 1 σ 2 2 B ( x ) x γ 1 2 σ 2 1 σ 2 2 B ( x ) = 0 , 20 whic h is equiv alent to e A ( γ 1 ) − 2 δ σ 2 1 σ 2 2 e B ( γ 1 ) 2 σ 2 1 σ 2 2 e B ( γ 1 ) x γ 1 = 0 , (6.2) where e A ( z ) and e B ( z ) are d efined in ( 3.4 ). Since g must b e (strictly) increasing in x and g (0) = 0, it follo ws that g 1 ( x ) > 0 in the region { 0 < x < b ∗ } . Moreo v er, since γ 1 ∈ (0 , 1) and β i > 0, we ha ve e B ( γ 1 ) > 0. Hence, ( 6.2 ) is also equiv a len t to e A ( γ 1 ) − 2 δ σ 2 1 σ 2 2 e B ( γ 1 ) = 0 . (6.3) W e n o w determine the corresp ondin g optimal reinsurance levels in the region { x < w 0 } with the constraint π i ∈ [0 , 1]. F rom ( 3.2 ) and the ansatz g 1 ( x ) = K 1 x γ 1 , w e hav e ¯ π 1 ( x ) = x w 1 and ¯ π 2 ( x ) = x w 2 . It is cle ar that w 0 = min { w 1 , w 2 } . F rom ( 3.1 ), the optimal distortion lev els are then g iv en by ¯ θ 1 ( x ) = β 1 σ 1 γ 1 w 1 and ¯ θ 2 ( x ) = β 2 σ 2 γ 1 w 2 . Due to the constraint π i ∈ [0 , 1], at least one line m u st retain all of its risk when the aggregate reserv e lev el exceeds the thresh old w 0 . The follo wing lemma states that the reten tion leve l of b o th lin es remains constan t when x ≥ w 0 . Lemma 6.1. Write ˜ w 0 := min { w 1 , w 2 } . F or x ≥ ˜ w 0 , ( ¯ π 1 , ¯ π 2 )( x ) = ˜ w 0 w 1 , ˜ w 0 w 2 . Pr o of. Su pp ose w 1 ≤ w 2 . It follo ws that ˜ w 0 = w 1 and ¯ π 1 ( x ) = 1 for x ≥ ˜ w 0 . Sin ce ¯ π 2 ( x ) = x w 2 = ¯ π 1 ( x ) w 1 w 2 = ˜ w 0 w 2 , the result then follo ws. The pro of for the case where w 2 ≤ w 1 is similar. Using the ab o v e lemma, in the region { w 0 < x < b ∗ } , the HJB equation ( 2.3 ) b ecomes N 1 g ′′ ( x ) + N 2 g ′ ( x ) − N 3 g ′ ( x ) 2 g ( x ) − δ g ( x ) = 0 , (6.4) where N 1 , N 2 , and N 3 are defined in ( 3.6 ). Define v ( x ) su c h that it satisfies v ( x ) := g ′ 2 ( x ) g 2 ( x ) , (6.5) where g 2 satisfies ( 6.4 ). W e can then rewr ite ( 6. 4 ) as v ′ ( x ) + 1 − N 3 N 1 v ( x ) 2 + N 2 N 1 v ( x ) − δ N 1 = 0 , (6.6) whic h is a Riccati equation since we assume that N 1 6 = N 3 . Define u ( x ) such th at it satisfies 1 − N 3 N 1 v ( x ) = u ′ ( x ) u ( x ) . Th en, ( 6.6 ) is equiv al en t to u ′′ ( x ) + N 2 N 1 u ′ ( x ) − 1 − N 3 N 1 δ N 1 u ( x ) = 0 , (6.7) whose solution is given by u ( x ) = K 3+ e γ 2+ x + K 3 − e γ 2 − x , where γ 2 ± are defin ed in ( 3.9 ), pr ovided that N 2 2 + 4 δ ( N 1 − N 3 ) > 0. Th e follo win g lemma pr o v es that N 2 2 + 4 δ ( N 1 − N 3 ) > 0 indeed holds. Lemma 6.2. Supp ose δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . It holds that N 2 2 + 4 δ ( N 1 − N 3 ) > 0 . Pr o of. Su pp ose N 1 > N 3 . Th e resu lt immediately follo ws. Su pp ose no w that N 1 < N 3 . Define h ( δ ) := N 2 2 + 4 δ ( N 1 − N 3 ) . W rite δ := µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . F r om Lemma 3.2 , it follo ws that γ 1 = 1 if δ = δ . Then, w 1 w 2 | γ 1 =1 = β 1 µ 2 σ 2 1 β 2 µ 1 σ 2 2 . Hence, h ( δ ) = N 2 2 + 4 µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 1 2 σ 2 1 (1 − β 1 ) + 1 2 σ 2 2 (1 − β 2 ) β 2 1 µ 2 2 σ 4 1 β 2 2 µ 2 1 σ 4 2 + ρσ 1 σ 2 β 1 µ 2 σ 2 1 β 2 µ 1 σ 2 2 21 = N 2 2 + 2 µ 2 1 β 1 σ 2 1 + 2 µ 2 2 β 2 σ 2 2 1 2 σ 2 1 + 1 2 σ 2 2 β 2 1 µ 2 2 σ 4 1 β 2 2 µ 2 1 σ 4 2 + ρσ 1 σ 2 β 1 µ 2 σ 2 1 β 2 µ 1 σ 2 2 + 2 µ 2 1 β 1 σ 2 1 + 2 µ 2 2 β 2 σ 2 2 − 1 2 β 1 σ 2 1 − 1 2 β 2 σ 2 2 β 2 1 µ 2 2 σ 4 1 β 2 2 µ 2 1 σ 4 2 = N 2 2 + 2 µ 2 1 β 1 σ 2 1 + 2 µ 2 2 β 2 σ 2 2 1 2 σ 2 1 + 1 2 σ 2 2 β 2 1 µ 2 2 σ 4 1 β 2 2 µ 2 1 σ 4 2 + ρσ 1 σ 2 β 1 µ 2 σ 2 1 β 2 µ 1 σ 2 2 − N 2 2 > 0 . Since h ′ ( δ ) = 4( N 1 − N 3 ) < 0, w e ha v e h ( δ ) > h ( δ ) > 0 f or all δ ∈ (0 , δ ). F rom the d efinition of v in ( 6.5 ), we then ha ve d d x [ln g 2 ( x )] = g ′ 2 ( x ) g 2 ( x ) = v ( x ) = N 1 N 1 − N 3 u ′ ( x ) u ( x ) = N 1 N 1 − N 3 d d x [ln u ( x )] . Hence, g 2 ( x ) = K 2 exp Z x w 0 v ( y )d y = K 2 exp N 1 N 1 − N 3 ln u ( x ) u ( w 0 ) = K 2 u ( x ) u ( w 0 ) N 1 N 1 − N 3 , where K 2 > 0 is an undetermined constan t. It must b e noted that u ( x ) u ( w 0 ) = K 3 e γ 2+ x + e γ 2 − x K 3 e γ 2+ w 0 + e γ 2 − w 0 , wher e K 3 := K 3+ K 3 − . This implies that g 2 implicitly dep ends on the constan t K 3 . In th e region { x > b ∗ } , since w e conjecture that g ′ ( x ) = a 2 , it m ust then hold that g 3 ( x ) = a 2 ( x − b ∗ + K 4 ) . W e then conjecture th e follo wing solution: g ( x ) = K 1 x γ 1 if x < w 0 , K 2 e R x w 0 v ( y )d y if w 0 ≤ x < b ∗ , a 2 ( x − b ∗ + K 4 ) if x ≥ b ∗ . (6.8) T o ensu r e that g is t wice con tin uously differentiable, w e requ ir e g , g ′ , and g ′′ to b e con tin u ous at the switc hing p oin ts w 0 and b ∗ . Since in the neigh b orho o d of w 0 the function g satisfies ( 2.3 ), it suffi ces to sh o w that g and g ′ are con tin uous at x = w 0 . W e hav e th e follo wing system of equations: K 1 w γ 1 0 = K 2 K 1 γ 1 w γ 1 − 1 0 = K 2 v ( w 0 ) , (6.9) whic h yields K 1 = K 2 w − γ 1 0 . (6.10) Moreo ver, K 3 m ust satisfy v ( w 0 ) = γ 1 w 0 . (6.11) W e then obtain K 3 defined in ( 3.9 ). In the neigh b orho o d of b ∗ , w e ha v e the follo w ing system of equations: K 2 exp " Z b ∗ w 0 v ( y ) d y # = a 2 K 4 K 2 v ( b ∗ ) exp " Z b ∗ w 0 v ( y ) d y # = a 2 K 2 v ( b ∗ ) 2 + v ′ ( b ∗ ) exp " Z b ∗ w 0 v ( y ) d y # = 0 . (6.12) 22 F rom the first and second equations, we obtain K 2 = a 2 v ( b ∗ ) exp " − Z b ∗ w 0 v ( y ) d y # and K 4 = 1 v ( b ∗ ) . (6.13) F rom the third equation, b ∗ m ust satisfy v ( b ∗ ) 2 + v ′ ( b ∗ ) = 0 . (6.14) The follo wing lemma guaran tees the existence of b ∗ . Lemma 6.3. Supp ose that δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 and N 1 6 = N 3 . Then, b ∗ exists and satisfies ( 3.8 ) . Pr o of. F rom ( 6.6 ), w e ha v e v ′ ( x ) + v ( x ) 2 = 1 N 1 N 3 v ( x ) 2 − N 2 v ( x ) + δ . Using ( 6.11 ) yields v ′ ( w 0 ) + v ( w 0 ) 2 = 1 N 1 N 3 v ( w 0 ) 2 − N 2 v ( w 0 ) + δ = 1 N 1 N 3 γ 2 1 w 2 0 − N 2 γ 1 w 0 + δ = − ψ ( γ 1 ) + e f ( γ 1 ) 2 σ 2 1 σ 2 2 ( β 1 + β 2 ) γ 1 ( γ 1 − 1) − (1 − ρ 2 )( γ 1 − 1) 2 − β 1 β 2 γ 2 1 2 , where e f ( γ 1 ) := ( β 2 µ 1 σ 2 + β 1 µ 2 σ 1 ) 2 γ 3 1 ( γ 1 − 1) + (1 − ρ ) 2 ( µ 2 1 σ 2 2 + µ 2 2 σ 2 1 ) γ 1 ( γ 1 − 1) 3 + 2( ρ − 1) β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 + ( β 1 + β 2 ) µ 1 µ 2 σ 1 σ 2 γ 2 1 ( γ 1 − 1) 2 . Since γ 1 is a solution of ψ ( z ) = 0 on (0 , 1), we ha v e v ′ ( w 0 ) + v ( w 0 ) 2 = e f ( γ 1 ) 2 σ 2 1 σ 2 2 ( β 1 + β 2 ) γ 1 ( γ 1 − 1) − (1 − ρ 2 )( γ 1 − 1) 2 − β 1 β 2 γ 2 1 2 < 0 . Supp ose b ∗ do es not exist. Since v ( x ) 2 + v ′ ( x ) is con tin uous in x , w e ha v e v ′ ( x ) + v ( x ) 2 < 0 for x > w 0 . (6.15) It must b e noted that γ 2+ > 0 if and only if N 1 > N 3 . Moreo v er, γ 2+ > γ 2 − . Since v ( x ) = N 1 N 1 − N 3 · u ′ ( x ) u ( x ) , it holds that lim x →∞ v ( x ) = N 1 N 1 − N 3 · lim x →∞ K 3 γ 2+ e γ 2+ x + γ 2 − e γ 2 − x K 3 e γ 2+ x + e γ 2 − x = N 1 N 1 − N 3 γ 2+ . (6.16) Moreo ver, γ 2 2+ + N 2 N 1 γ 2+ − 1 − N 1 N 3 δ N 1 = 0 since γ 2+ is a solution to the characte ristic p olynomial asso ciated with ( 6.7 ). W e then hav e lim x →∞ [ v ′ ( x ) + v ( x ) 2 ] = 1 N 1 lim x →∞ N 3 v ( x ) 2 − N 2 v ( x ) + δ = 1 N 1 N 3 N 2 1 ( N 1 − N 3 ) 2 γ 2 2+ − N 2 N 1 N 1 − N 3 γ 2+ + δ = N 3 N 1 ( N 1 − N 3 ) 2 γ 2 2+ − N 2 N 1 N 1 N 3 − 1 γ 2+ + δ ( N 1 − N 3 ) N 2 1 N 1 N 3 − 1 = N 3 N 1 ( N 1 − N 3 ) 2 γ 2 2+ + N 2 N 1 γ 2+ − 1 − N 1 N 3 δ N 1 − N 2 N 3 γ 2+ + δ ( N 1 − N 3 ) N 1 N 3 = N 3 N 1 ( N 1 − N 3 ) 2 0 − N 2 N 3 γ 2+ + δ ( N 1 − N 3 ) N 1 N 3 = N 1 ( N 1 − N 3 ) 2 − N 2 γ 2+ + 1 − N 3 N 1 δ . 23 Supp ose − N 2 γ 2+ + 1 − N 3 N 1 δ ≤ 0. It is equiv alent to the follo wing inequalit y: N 2 2 + 2 δ ( N 1 − N 3 ) ≤ N 2 q N 2 2 + 4 δ ( N 1 − N 3 ) . (6.17) If N 1 > N 3 , th en N 2 2 + 2 δ ( N 1 − N 3 ) > 0. If N 1 < N 3 , th en N 2 2 + 2 δ ( N 1 − N 3 ) > N 2 2 + 4 δ ( N 1 − N 3 ) > 0. Squaring b oth sides of ( 6.17 ) then yields 4 δ 2 ( N 1 − N 3 ) 2 ≤ 0 , whic h is a con tradiction. Hence, − N 2 γ 2+ + 1 − N 3 N 1 δ > 0, and, consequen tly , lim x →∞ [ v ′ ( x ) + v ( x ) 2 ] > 0 . This con tradicts ( 6.15 ), which p ro v es the existence of b ∗ . Th us, w e ha v e obtained the form of the v a lue function g defined in ( 3.10 ). The corresp onding optimal reinsurance and distortion lev els are giv en by ( 3.11 ). Remark 6.4. The first derivative and se c ond derivative of g ar e give n as fol lows: g ′ ( x ) = a 2 γ 1 v ( b ∗ ) e R b ∗ w 0 v ( y )d y x w 0 γ 1 − 1 if x < w 0 , a 2 v ( x ) v ( b ∗ ) e R b ∗ w 0 v ( y )d y e R x w 0 v ( y )d y if w 0 ≤ x < b ∗ , a 2 if x ≥ b ∗ , g ′′ ( x ) = a 2 γ 1 ( γ 1 − 1) v ( b ∗ ) e R b ∗ w 0 v ( y )d y x w 0 γ 1 − 2 if x < w 0 , a 2 [ v ( x ) 2 + v ′ ( x )] v ( b ∗ ) e R b ∗ w 0 v ( y )d y e R x w 0 v ( y )d y if w 0 ≤ x < b ∗ , 0 if x ≥ b ∗ . F r om ( 6.15 ) , we c a n say that v ′ ( x ) < 0 for x > w 0 , which implies that v is de cr e asing for x > w 0 . Mor e over, fr om ( 6.16 ) , we have lim x →∞ v ( x ) > 0 , which then implies that v ( b ∗ ) > 0 . It is then cle ar that g ′ ( x ) > 0 for x > 0 , which implies that g is strictly inc r e asing for x > 0 . M or e over, si nc e γ 1 ∈ (0 , 1) and v ( x ) 2 + v ′ ( x ) < 0 in the r e gion { w 0 < x < b ∗ } , it holds that g ′′ ( x ) ≤ 0 for x > 0 , which implies that g is c onc ave for x > 0 . 6.3 Pro of of Theorem 3.6 In this section, we present the ke y resu lts used to obtain Theorem 3.6 . The discussion serves as the pro of for Theorem 3.6 . Supp ose γ 1 ∈ (0 , 1) exists, ( 3.3 ) holds, and N 1 = N 3 , as required in Th eorem 3.6 . Since γ 1 exists, then δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . In the region { x < w 0 } , we obtain ( 6.1 ) and still obtain its solution g 1 ( x ) = K 1 x γ 1 , wh ere γ 1 is a solution of ψ ( z ) = 0 on (0 , 1) and K 1 > 0 is an unknown constan t. In the region { w 0 < x < b ∗ } , we obtain ( 6.4 ). Using the same definition of v in ( 6.5 ) yields ( 6.6 ). Since N 1 = N 3 , ( 6.6 ) has a solution giv en by v ( x ) = e − N 2 N 1 x Z x w 0 δ N 1 e N 2 N 1 z d z + K 3 = δ N 2 1 − e − N 2 N 1 ( x − w 0 ) + K 3 e − N 2 N 1 x . W e can then conjecture the s ame solution giv en b y ( 6.8 ). Similar to the previous section, we require g , g ′ , and g ′′ to b e con tin uous at the switc hing p oints w 0 and b ∗ . A t x = w 0 , we hav e the system of equations obtained in ( 6.9 ) , whic h also yields ( 6.10 ) and ( 6.11 ). Using ( 6.11 ), we obtain K 3 = γ 1 w 0 e N 2 N 1 w 0 . In th e neigh b orho o d of b ∗ , w e still obtain th e system of equations in ( 6.12 ), whic h yields ( 6.13 ) and ( 6.14 ). W e then hav e the follo wing lemma: Lemma 6.5. Supp ose that δ < µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 and N 1 = N 3 . Then, b ∗ exists and satisfies ( 3.12 ) . Pr o of. F rom ( 6.6 ), we ha v e v ′ ( x ) + v ( x ) 2 = δ N 1 − N 2 N 1 v ( x ) + v ( x ) 2 . Sim ilar to L emm a 6.3 , w e obtain v ′ ( w 0 ) + v ( w 0 ) 2 < 0 . Supp ose b ∗ do es not exist. Sin ce v ( x ) 2 + v ′ ( x ) is con tin uous in x , we h a v e v ′ ( x ) + v ( x ) 2 < 0 for x > w 0 , whic h implies that 0 > v ′ ( x ) = 1 N 1 ( δ − N 2 v ( x )) . Hence, we obtain v ( x ) > δ N 2 and v ′ ( x ) + v ( x ) 2 > δ N 1 − N 2 N 1 v ( x ) + δ 2 N 2 2 = δ N 1 − N 2 N 1 δ N 2 1 − e − N 2 N 1 ( x − w 0 ) + γ 1 w 0 e − N 2 N 1 ( x − w 0 ) + δ 2 N 2 2 24 = δ 2 N 2 2 − N 2 N 1 γ 1 w 0 − δ N 2 e − N 2 N 1 ( x − w 0 ) . Th us, lim x →∞ [ v ′ ( x ) + v ( x ) 2 ] = δ 2 N 2 2 > 0 , wh ic h is a con tradiction. This pro v e s the result. Th us, w e ha v e obtained the form of the v a lue function g defined in ( 3.14 ). The corresp onding optimal reinsurance and distortion levels are of th e same form as in ( 3.11 ). The discussion on g defined in ( 3.14 ) b eing increasing and conca v e is similar to that in Remark 6.4 . 6.4 Pro of of Theorem 3.8 In this section, we present the ke y resu lts used to obtain Theorem 3.8 . The discussion serves as the pro of for Theorem 3.8 . Supp ose that ψ ( z ) = 0 do es not hav e a solution, or, equiv ale n tly , δ ≥ µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 . W e conject ure that g ( x ) = a 2 x satisfies the HJB equation ( 2.3 ). It is clear that g ′ ( x ) = a 2 for all x . Hence, a 1 ≤ g ′ ( x ) and a 2 ≤ g ′ ( x ) are immediately satisfied. Moreo v er, b y the definition of ( 3.7 ), w e ha v e b ∗ = 0. W rite ˜ w 0 := min { w 1 , w 2 } . I n the region { x < ˜ w 0 } , w e ha v e sup π i ∈ [0 , 1] inf θ i ∈ R " L ϑ ( g )( x ) + g ( x ) 2 X i =1 θ 2 i 2 β i # = A ( x ) 2 σ 2 1 σ 2 2 B ( x ) − δ g ( x ) = β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 2 β 1 β 2 σ 2 1 σ 2 2 ≤ 0 . In the region { x > ˜ w 0 } , w e ha v e, b y Lemma 6.1 , ( ¯ π 1 , ¯ π 2 )( x ) = ˜ w 0 w 1 , ˜ w 0 w 2 . Then, sup π i ∈ [0 , 1] inf θ i ∈ R " L ϑ ( g )( x ) + g ( x ) 2 X i =1 θ 2 i 2 β i # = N 1 g ′′ ( x ) + N 2 g ′ ( x ) − N 3 g ′ ( x ) 2 g ( x ) − δ g ( x ) = a 2 N 2 − N 3 x − δ x ≤ a 2 N 2 − 2 p δ N 3 ≤ a 2 N 2 − 2 s N 3 µ 2 1 2 β 1 σ 2 1 + µ 2 2 2 β 2 σ 2 2 ! = a 2 N 2 − s µ 2 1 ˜ w 2 0 w 2 1 + µ 2 2 ˜ w 2 0 w 2 2 + β 2 σ 2 2 ˜ w 2 0 β 1 σ 2 1 w 2 2 µ 2 1 + β 1 σ 2 1 ˜ w 2 0 β 2 σ 2 2 w 2 1 µ 2 2 ! ≤ a 2 N 2 − s µ 2 1 ˜ w 2 0 w 2 1 + µ 2 2 ˜ w 2 0 w 2 2 + 2 µ 1 µ 2 ˜ w 2 0 w 1 w 2 ! = 0 , where the fi rst and third inequalities follo w by the arithmetic mean-geometric mean (AM-GM ) in equ alit y while the second inequalit y follo ws b y β 2 µ 2 1 σ 2 2 + β 1 µ 2 2 σ 2 1 − 2 δ β 1 β 2 σ 2 1 σ 2 2 ≤ 0. 7 Conclusion W e study an optimal dividend p ay out, reinsu rance, and capital injection problem for a n insurer with collaborating business lines under mo del un certain t y . By incorp orating am biguit y and a relativ e en trop y-base d p enalt y , w e characte rize the optimal v alue function and the corresp ond ing optimal strateg ies in closed form across seve ral parameter regimes. Our resu lts sho w that the optimal dividend -capital in jection strategy is of barrier t yp e, while the optimal prop ortional r einsurance co v e rage and the deviation of th e worst-case mo del 25 from the reference m o del are decreasing with resp ect to th e aggregate reserv e leve l. T he numerical illustrations further sho w ho w am biguit y a version influ en ces the optimal strategie s. References Albrec her, H., Azcue, P ., and Muler, N. (2017). Optimal dividend strategies for t w o collab orating insur an ce companies. A dvanc es in Applie d Pr ob ability , 49(2):5 15–5 48. Albrec her, H. and Th onhauser, S . (2009). Op timalit y results for dividend problems in insur ance. R evi sta De L a R e al A c ademia D e Cie nc i as E xactas, Fisic as y Natur ales , 103(2) :295–3 20. Anderson, E. W., Hansen, L. P ., and Sargent, T. J. (2003). A quartet of semigroups for mo del sp ecification, robustness, prices of risk, and mo d el detection. Journal of the Eu r op e an Ec onomic Asso ciation , 1(1) :68–1 23. Asm ussen, S. and Albrec her, H. (2010) . Ruin Pr ob abilities , v olume 14 of A dvanc e d Series on Statistic al Sci e nc es & Applie d P r ob ability . W orld Scienti fic, Hac k ensac k, NJ, 2nd edition. Av anzi, B. (2009). Strategies for dividend distribution: A review. North Americ an A ctuarial Journal , 13(2): 217–2 51. Azcue, P . and Muler, N. (2021 ). A multidimensional p roblem of optimal dividend s with irreve rsible switc h ing: A con v ergent numerical sc h eme. A pplie d Mathematics & O ptimization , 83:1613 –1649 . Azcue, P ., Muler, N., and Palmo wski, Z. (2019) . Optimal dividend pa ymen ts for a t w o- dimensional in surance risk pro cess. Eur op e an A ctuar ial Journal , 9:241–27 2. Bo onen, T . J. and Dela V ega , E. J. C . (2025 ). Op timal d ividend, r einsurance, and capita l in jec- tion strategies for collab orating b usiness lines: Th e case of excess-of-lo ss reins urance. On ArXiv: https:// arxiv.org /abs/2511.11383 . Bo onen, T. J., Dela V ega, E. J. C., and Zou , B. (2025). Op timal dividend , reinsu rance, and capital injection s trategie s for an insurer with t w o collab orating business lines. On ArXiv: https:// arxiv.org /abs/2508.08130 . Cao, J., Li, D., Y oun g, V. R., and Zou, B. (2023). Reins u rance games with t w o reinsu rers: T ree v ersus c hain. Eur op e an Journal of Op er ational R ese ar ch , 310(2):928 –941 . Chakrab orty , P ., Cohen, A., and Y oung, V. R. (20 23). Optimal dividends under m o del un certain t y . SIAM Journal on Financial Mathematics , 14(2):497 –524 . Czarna, I. and Palmo wski, Z. (2011). De Finetti’s dividend p roblem and impulse con trol for a tw o-dimens ional insurance risk pro cess. Sto chastic M o dels , 27(2):220– 250. de Finetti, B. (1957). Su un’imp ostazione alternativ a d ella teoria collet tiv a del risc hio. T r ansactions of the 15th International Congr ess of A ctuaries , 2:4 33–44 3. F eng, Y., Siu, T. K., and Zh u, J. (2024). Optimal pa y o ut strategies when Bruno de Finetti m eets model uncertain t y . Insur anc e: Mathematics and Ec on omics , 116:14 8–16 4. F eng, Y., Zhu, J., an d Siu, T. K. (2021). Optimal risk exp osur e and dividend pay out p olicies u nder mo d el uncertain t y . Insur anc e: Mathematics and Ec on omics , 100:1– 29. Garces, L. P . D. M. and Shen, Y. (2025). Robust optimal in v estmen t an d consumption strategies with p ortfolio constrain ts and sto c hastic en vironmen t. Eu r op e an Journal of O p er ational R ese ar ch , 322:693–71 2. Grandits, P . (201 9). A tw o-dimens ional d ivid end problem for collab orating companies and an optimal stopping problem. Sc andinavian A ctuarial Journal , 2019(1):80– 96. Gu, J.-W., Steffensen, M., and Z heng, H. (2018) . Optimal dividen d strategies of tw o collab orating b usinesses in the diffusion approxima tion mo d el. Mathematics of Op er ations R ese ar ch , 43(2):377 –398 . Hansen, L. P . and Sargent, T. J. (200 8). R obustness . Princeto n Unive rsit y Press. Hansen, L. P ., Sargent, T. J ., T u rm uham b eto v a, G., and Williams, N. (2006). Robust con trol and missp ecifi- cation. Journal of E c onomic The ory , 128(1):45– 90. Højgaard, B. and T aksar, M. (1999). Controll ing r isk exp osur e an d dividends pa y o ut sc hemes: in surance compan y example. Mathematic al Financ e , 9(2 ):153– 182. Hu, D., Chen, S., and W ang, H. (2018) . Robust reinsur ance contrac ts w ith uncertain t y ab out jump risk. Eur op e an Journal of Op er ational R ese ar ch , 266(3):117 5–11 88. Jean blanc-Picqu ´ e, M. and Shiry aev, A. N. (1995 ). O ptimization of the flow of dividends. R ussian Mathematic al Surveys , 50(2):25 7–278 . Liu, L. and Cheu n g, E. C . K. (2014) . On a biv ariat e risk pr o cess with a d ivid end barrier strategy . Annals of A ctuarial Scienc e , 9(1):3–35. Maenhout, P . J. (2004). Robust p ortfolio and asset pricing. The R eview of Financial Studies , 17(4):9 51–98 3. 26 Øksendal, B. (2013). Sto chastic Differ ential Equations: An Intr o duction with Applic ations . Sp ringer, 6th edition. Pham, H. (2009). Continuous-time Sto ch astic Contr ol and Optimizatio n with Financial Applic a tions . Spr in ger. Sc hmidli, H. (2008) . Sto c hastic Contr ol in Insur a nc e . Probabilit y and Its Applications. Sp ringer London. Strietzel, P . L. and Heinric h, H. E. (2022). Optimal d ividends for a t w o -dimensional risk mo del with simulta- neous ruin of b oth branches. Communic ations in Statistics - The ory and Metho ds , 10(6):116 . W ang, P ., W ang, W., and W ang, Z. (2025). Robust optimal dividend-reins urance-financing problems under standard deviation premiu m prin ciple. A dva nc es in Continuous and Discr ete Mo dels , 20 25(10 8):1– 34. W ei, P ., Y ang, C., and Zhuang, Y. (202 3). Robu st consumption and p ortfolio c hoice w ith d eriv ativ es trading. Eur op e an Journal of Op er ational R ese ar ch , 302:832–8 50. Y ang, B., Song, R., Y ao, D., and Ch eng, G. (2025) . Optimal dividend and prop ortional r einsurance s trategy for the risk mo del with common sh o c k d ep endence. Sto chastic Mo d els , 41(1):10– 37. A Pro of of Theorem 2.4 Part I: Sin ce C i and L i are c` adl` ag pro cesses, w e hav e dC i ( t ) = dC c i ( t ) + C i ( t ) − C i ( t − ) and dL i ( t ) = dL c i ( t ) + L i ( t ) − L i ( t − ), where C c i ( t ) and L c i ( t ) represen t the con tin u ous parts of C i ( t ) and L i ( t ), resp ectiv ely . W rite ( π , θ ) := ( π 1 , π 2 , θ 1 , θ 2 ). F or an y finite time t > 0, using Itˆ o’s form ula to e − δ ( t ∧ τ u ) w ( X u ( t ∧ τ u )) yields e − δ ( t ∧ τ u ) w ( X u ( t ∧ τ u )) = w ( x ) + Z t ∧ τ u 0 e − δs L ( π ( s − ) ,θ ( s − )) ( w )( X u ( s − ))d s − 2 X i =1 Z t ∧ τ u 0 e − δs σ i π i ( s − ) w ′ ( X u ( s − ))d W Q θ i ( s ) − 2 X i =1 Z t ∧ τ u 0 e − δs w ′ ( X u ( s − ))d C c i ( s ) + 2 X i =1 Z t ∧ τ u 0 e − δs w ′ ( X u ( s − ))[d L c i ( s ) − d L c 3 − i ( s )] + X 0 ≤ s ≤ t ∧ τ u e − δs ( w ( X u ( s )) − w ( X u ( s − ))) = w ( x ) + Z t ∧ τ u 0 e − δs L ( π ( s − ) ,θ ( s − )) ( w )( X u ( s − ))d s − 2 X i =1 Z t ∧ τ u 0 e − δs σ i π i ( s − ) w ′ ( X u ( s − ))d W Q θ i ( s ) − 2 X i =1 Z t ∧ τ u 0 e − δs w ′ ( X u ( s − ))d C c i ( s ) + X 0 ≤ s ≤ t ∧ τ u e − δs ( w ( X u ( s )) − w ( X u ( s − ))) , where θ 1 and θ 2 satisfy the No vik ov condition. Since w ( x ) is conca v e, w ′ ( x ) ≥ a 2 , and π i ( s − ) ∈ [0 , 1], it holds that the pr o cess n P 2 i =1 R t ∧ τ u 0 e − δs σ i π i ( s − ) w ′ ( X u ( s − ))d W Q θ i ( s ) o t ≥ 0 is a true martingale under the alternativ e probabilit y measure Q θ . T aking exp ectations yields E Q θ h e − δ ( t ∧ τ u ) w ( X u ( t ∧ τ u )) i = w ( x ) + E Q θ " Z t ∧ τ u 0 e − δs L ( π ( s − ) ,θ ( s − )) ( w )( X u ( s − ))d s − 2 X i =1 Z t ∧ τ u 0 e − δs w ′ ( X u ( s − ))d C c i ( s ) + X 0 ≤ s ≤ t ∧ τ u e − δs ( w ( X u ( s )) − w ( X u ( s − ))) # . (A.1) Since w ′ ( x ) ≥ a 2 and X u ( s − ) ≥ X u ( s ), w e ha v e w ( X u ( s − )) − w ( X u ( s )) ≥ a 2 ( X u ( s − ) − X u ( s )) = a 2 ( X u 1 ( s − ) + X u 2 ( s − ) − X u 1 ( s ) − X u 2 ( s )) = a 2 ( C 1 ( s ) + C 2 ( s ) − C 1 ( s − ) − C 2 ( s − )) . 27 Since C 1 and C 2 are nondecreasing, w e ha v e d C c 1 ( s ) , d C c 2 ( s ) ≥ 0. Hence, E Q θ 2 X i =1 Z t ∧ τ u 0 e − δs w ′ ( X u ( s − ))d C c i ( s ) − X 0 ≤ s ≤ t ∧ τ u e − δs ( w ( X u ( s )) − w ( X u ( s − ))) ≥ E Q θ a 2 2 X i =1 Z t ∧ τ u 0 e − δs d C c i ( s ) + a 2 X 0 ≤ s ≤ t ∧ τ u e − δs ( C 1 ( s ) + C 2 ( s ) − C 1 ( s − ) − C 2 ( s − )) = E Q θ " a 2 2 X i =1 Z t ∧ τ u 0 e − δs d C i ( s ) # ≥ E Q θ " 2 X i =1 a i Z t ∧ τ u 0 e − δs d C i ( s ) # , (A.2) where the last inequalit y is du e to a 1 ≤ a 2 . Combining ( A.1 ) and ( A.2 ) and replacing θ w ith θ ∗ yield w ( x ) ≥ E Q θ ∗ " e − δ ( t ∧ τ u ) w ( X u ( t ∧ τ u )) − Z t ∧ τ u 0 e − δs L ( π ( s − ) ,θ ∗ ( s − )) ( w )( X u ( s − ))d s + 2 X i =1 a i Z t ∧ τ u 0 e − δs d C i ( s ) # ≥ E Q θ ∗ " e − δ ( t ∧ τ u ) w ( X u ( t ∧ τ u )) − Z t ∧ τ u 0 e − δs L ( π ( s − ) ,θ ∗ ( s − )) ( w )( X u ( s − )) + 2 X i =1 a i ( θ ∗ i ( s − )) 2 2 e β i w ( X u ( s − )) ! d s + 2 X i =1 a i Z t ∧ τ u 0 e − δs d C i ( s ) + Z t ∧ τ u 0 e − δs ( θ ∗ i ( s − )) 2 2 e β i w ( X u ( s − ))d s ! # ≥ E Q θ ∗ " 2 X i =1 a i Z t ∧ τ u 0 e − δs d C i ( s ) + Z t ∧ τ u 0 e − δs ( θ ∗ i ( s − )) 2 2 e β i w ( X u ( s − ))d s !# , where the last in equalit y is due to ( 2.5 ) and the nonnegativit y of e − δ ( t ∧ τ u ) w ( X u ( t ∧ τ u )). Letting t → ∞ and using the monotone con v ergence theorem yield w ( x ) ≥ E Q θ ∗ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ ∗ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # (A.3) ≥ inf θ ∈ Θ E Q θ ∗ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # . Since the ab o v e inequalities hold for an y admissible u , we ha ve w ( x ) ≥ sup u ∈U inf θ ∈ Θ E Q θ ∗ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # , x ≥ 0 . (A.4) Part II : Cons id er the strateg y u ∗ ( X u ∗ ( t )) = ( π ∗ 1 ( X u ∗ ( t )) , π ∗ 2 ( X u ∗ ( t )) , C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ). Und er the barrier strategy ( C 1 ,b ∗ , C 2 ,b ∗ , L 1 ,b ∗ , L 2 ,b ∗ ), at time t = 0, Line 2 pa y s the amoun t X u ∗ (0 − ) − b ∗ as dividen ds if and only if X u ∗ (0 − ) > b ∗ . S ince Line 1 do es not p a y d ividends, it holds th at C 1 ,b ∗ ( t ) = 0 for all t ≥ 0. A t an y time t > 0, the aggregate reserve will not exceed b ∗ and there will b e no dividend pa ymen ts. Th e dividend pay out is made as con tin u ous p a ymen ts at time t > 0 if and only if X u ∗ ( t − ) = b ∗ ; that is, d C i,b ∗ ( t ) = 1 { X u ∗ ( t − )= b ∗ } d C i,b ∗ ( t ) and C i,b ∗ ( t ) − C i,b ∗ ( t − ) = 0 for all t > 0. It follo ws that for any x ∈ [0 , b ∗ ], giv en th at X u ∗ (0 − ) = x , X u ∗ ( t ) is alwa ys con tinuous until ruin time. F or x ∈ [0 , b ∗ ] and t > 0, applying Itˆ o’s lemma to e − δ ( t ∧ τ u ∗ ) w ( X u ∗ ( t ∧ τ u ∗ )) and taking exp ectations yield E Q θ h e − δ ( t ∧ τ u ∗ ) w ( X u ∗ ( t ∧ τ u ∗ )) i = w ( x ) + E Q θ " Z t ∧ τ u ∗ 0 e − δs L ( π ∗ ( s − ) ,θ ( s − )) ( w )( X u ∗ ( s − ))d s − 2 X i =1 Z t ∧ τ u ∗ 0 e − δs w ′ ( X u ∗ ( s − ))d C c i,b ∗ ( s ) # , (A.5) 28 where C c i,b ∗ ( t ) is the con tin uous part of C i,b ∗ ( t ). Moreo v er, for x ∈ [0 , b ∗ ], w e ha v e E Q θ " 2 X i =1 Z t ∧ τ u ∗ 0 e − δs w ′ ( X u ∗ ( s − ))d C c i,b ∗ ( s ) # = E Q θ " 2 X i =1 Z t ∧ τ u ∗ 0 e − δs w ′ ( b ∗ ) 1 { X u ∗ ( s − )= b ∗ } d C c i,b ∗ ( s ) # = E Q θ " 2 X i =1 Z t ∧ τ u ∗ 0 e − δs a 2 d C c i,b ∗ ( s ) # = E Q θ " 2 X i =1 Z t ∧ τ u ∗ 0 e − δs a 2 d C i,b ∗ ( s ) # = E Q θ " 2 X i =1 Z t ∧ τ u ∗ 0 e − δs a i d C i,b ∗ ( s ) # . (A.6) Substituting ( A.6 ) int o ( A.5 ) and using ( 2.6 ) yield w ( x ) = E Q θ " e − δ ( t ∧ τ u ∗ ) w ( X u ∗ ( t ∧ τ u ∗ )) − Z t ∧ τ u ∗ 0 e − δs L ( π ∗ ( s − ) ,θ ( s − )) ( w )( X u ∗ ( s − )) + 2 X i =1 a i ( θ i ( s − )) 2 2 e β i ! d s + 2 X i =1 a i Z t ∧ τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z t ∧ τ u ∗ 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s ! # ≤ E Q θ " e − δ ( t ∧ τ u ∗ ) w ( X u ∗ ( t ∧ τ u ∗ )) + 2 X i =1 a i Z t ∧ τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z t ∧ τ u ∗ 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s ! # . (A.7) Using the dominated conv ergence th eorem and X u ∗ ( τ u ∗ ) = 0 yields lim t →∞ E Q θ h e − δ ( t ∧ τ u ∗ ) w ( X u ∗ ( t ∧ τ u ∗ )) i = E Q θ h e − δτ u ∗ w ( X u ∗ ( τ u ∗ )) i = 0 . Using the monotone con v erge nce theorem on ( A.7 ) yields w ( x ) ≤ E Q θ " 2 X i =1 a i Z τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z τ u ∗ 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s !# . (A.8) Due to the arbitrariness of θ ∈ Θ, w e ha v e , for x ∈ [0 , b ∗ ], w ( x ) ≤ inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z τ u ∗ 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s !# ≤ sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # . (A.9) Recall that w ′ ( x ) = a 2 for x ≥ b ∗ . By the con tin u it y of w ( x ) and ( A.8 ), w e obtain w ( x ) = w ( b ∗ ) + a 2 ( x − b ∗ ) ≤ E Q θ b ∗ " 2 X i =1 a i Z τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z τ u ∗ 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s !# + a 2 ( x − b ∗ ) (A.10) = E Q θ " 2 X i =1 a i Z τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z τ u ∗ 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s !# , (A.11) 29 where E Q θ b ∗ [ · ] is the conditional exp ectation giv en X u ∗ (0) = x 1 + x 2 = b ∗ . Sim ilar to ( A.9 ), we hav e, for x > b ∗ , w ( x ) ≤ sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # . (A.12) Com bining ( A.4 ) with ( A.9 ) and ( A.12 ) yields w ( x ) = sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # , x ≥ 0 . Part III: Replacing θ in ( A.7 ), ( A.8 ), ( A.10 ), and ( A.11 ) w ith θ ∗ and using ( 2.7 ) mak e ( A.7 ), ( A.8 ), ( A.10 ), and ( A.11 ) equalities. Moreo ver, we ha v e w ( x ) = E Q θ ∗ " 2 X i =1 a i Z τ u ∗ 0 e − δs d C i,b ∗ ( s ) + Z τ u ∗ 0 e − δs ( θ ∗ i ( s − )) 2 2 e β i w ( X u ∗ ( s − ))d s !# , x ≥ 0 . Since ( A.3 ) holds for any admissible u , it follo w s that w ( x ) ≥ sup u ∈U E Q θ ∗ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ ∗ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # ≥ inf θ ∈ Θ sup u ∈U E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # , (A.13) for x ≥ 0. C om bining ( A.13 ) with ( A.9 ) and ( A.12 ) leads to inf θ ∈ Θ sup u ∈U E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s !# ≤ w ( x ) ≤ sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s !# . Since it alw a ys h olds th at sup u ∈U inf θ ∈ Θ E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # ≤ inf θ ∈ Θ sup u ∈U E Q θ " 2 X i =1 a i Z τ u 0 e − δs d C i ( s ) + Z τ u 0 e − δs ( θ i ( s − )) 2 2 e β i w ( X u ( s − ))d s # , the result is prov ed. B Pro of of Theorem 4.1 Supp ose 0 < ρ ≤ µ 1 /σ 1 µ 2 /σ 2 ≤ 1 ρ or − 1 < ρ ≤ 0. The optimization o v er π i (reinsurance decision) can then b e simplified to: sup π 1 ∈ [0 , 1] ,π 2 ∈ [0 , 1] 1 2 σ 2 1 π 2 1 + 1 2 σ 2 2 π 2 2 + ρσ 1 σ 2 π 1 π 2 g ′′ ( x ) + ( µ 1 π 1 + µ 2 π 2 ) g ′ ( x ) , 30 and, ignoring the constrain ts o v er [0 , 1], we obtai n the follo wing candidate maximizers b π 1 ( x ) = − µ 1 σ 2 − ρµ 2 σ 1 σ 2 1 σ 2 (1 − ρ 2 ) · g ′ ( x ) g ′′ ( x ) and b π 2 ( x ) = − µ 2 σ 1 − ρµ 1 σ 2 σ 1 σ 2 2 (1 − ρ 2 ) · g ′ ( x ) g ′′ ( x ) . In the region { x < w 0 } , the HJB equation ( 4.2 ) b ecomes − ( µ 1 σ 2 − µ 2 σ 1 ) 2 + 2(1 − ρ ) µ 1 µ 2 σ 1 σ 2 2 σ 2 1 σ 2 2 (1 − ρ 2 ) · g ′ ( x ) 2 g ′′ ( x ) − δ g ( x ) = 0 . Using the ansatz g 1 ( x ) = K 1 x γ 1 yields γ 1 defined in ( 4.4 ). Hence, we obta in ¯ π 1 ( x ) = x w 1 and ¯ π 2 ( x ) = x w 2 as candidate maximizers for the reinsurance lev els, where w 1 and w 2 are defined in ( 3.5 ). It follo ws that w 0 = min { w 1 , w 2 } . In the r egion { w 0 < x < b ∗ } , th e HJB equation ( 4.2 ) b ecomes N 1 g ′′ ( x ) + N 2 g ′ ( x ) − δ g ( x ) = 0, wh ere N 1 and N 2 are defined in ( 3.6 ). Its solution is giv en b y g 2 ( x ) = K 2+ e γ 2+ x + K 2 − e γ 2 − x , (B.1) where γ 2 ± is d efined in ( 3.9 ). In the regio n { x > b ∗ } , g m ust satisfy g ′ ( x ) = a 2 . Hence, we m ust ha v e g 3 ( x ) = a 2 ( x − b ∗ + K 3 ) . T o ensu r e that g is t wice con tin uously differentiable, w e requ ir e g , g ′ , and g ′′ to b e con tin u ous at the switc hing p oin ts w 0 and b ∗ . Since in the neigh b orho o d of w 0 the function g satisfies ( 2.3 ), it suffi ces to sh o w that g and g ′ are con tin u ous at x = w 0 . Let α 2 ± : = K 2 ± K 1 e γ 2 ± w 0 . W e then hav e the follo wing system of equations: w γ 1 0 = α 2+ + α 2 − , γ 1 w γ 1 − 1 0 = γ 2+ α 2+ + γ 2 − α 2 − , whose solution is giv en by α 2+ = w γ 1 − 1 0 ( γ 1 − γ 2 − w 0 ) γ 2+ − γ 2 − and α 2 − = w γ 1 − 1 0 ( γ 2+ w 0 − γ 1 ) γ 2+ − γ 2 − . I t m ust b e noted that the follo wing equations hold: (i) γ 2 ± = 1 − γ 1 w 0 − 1 ± 1 √ 1 − γ 1 ; (ii) γ 2+ − γ 2 − = 2 √ 1 − γ 1 w 0 ; (iii) γ 1 − γ 2 − w 0 = 1 + √ 1 − γ 1 ; and (iv) γ 2+ w 0 − γ 1 = √ 1 − γ 1 − 1. Hence, α 2+ = − w γ 1 +1 0 2(1 − γ 1 ) γ 2 − > 0 and α 2 − = − w γ 1 +1 0 2(1 − γ 1 ) γ 2+ < 0 . W e can then rewrite g 2 in ( B.1 ) as g 2 ( x ) = − λ γ 2 − e γ 2+ ( x − w 0 ) + γ 2+ e γ 2 − ( x − w 0 ) , where λ := K 1 w γ 1 +1 0 2(1 − γ 1 ) . A t x = b ∗ , w e ha v e the follo wing system of equations: − λ h γ 2 − e γ 2+ ( b ∗ − w 0 ) + γ 2+ e γ 2 − ( b ∗ − w 0 ) i = a 2 K 3 , − λγ 2+ γ 2 − h e γ 2+ ( b ∗ − w 0 ) + e γ 2 − ( b ∗ − w 0 ) i = a 2 , − λγ 2+ γ 2 − h γ 2+ e γ 2+ ( b ∗ − w 0 ) + γ 2 − e γ 2 − ( b ∗ − w 0 ) i = 0 . (B.2) F rom th e third equation in ( B.2 ), w e must hav e γ 2+ e γ 2+ ( b ∗ − w 0 ) + γ 2 − e γ 2 − ( b ∗ − w 0 ) = 0 , wh ic h is equ iv alen t to ( 4.3 ). Since γ 2+ + γ 2 − < 0, we ha v e b ∗ > w 0 . F rom the second equation in ( B.2 ), w e obtain ( 4. 6 ). Dividin g the first equation in ( B.2 ) b y the seco nd equation yields K 3 = γ 2 − − γ 2 − γ 2+ γ 2+ γ 2+ − γ 2 − + γ 2+ − γ 2 − γ 2+ γ 2 − γ 2+ − γ 2 − γ 2+ γ 2 − − γ 2 − γ 2+ γ 2+ γ 2+ − γ 2 − + − γ 2 − γ 2+ γ 2+ γ 2+ − γ 2 − = γ 2+ + γ 2 − γ 2+ γ 2 − = 1 δ µ 1 w 0 w 1 + µ 2 w 0 w 2 = N 2 δ . Th us, we hav e obtained the v alue fu nction giv en in ( 4.5 ). The co rresp ondin g op timal reinsurance leve ls are 31 giv en b y ( 4.7 ). C Additional Numerical Results Figures 10 and 11 and T able 3 illustrate the impact of m o del u ncertain t y on the in surer’s optimal strategies when the reserv e pro cesses of b oth lines h a v e the same drift and diffusion coefficients. T he k ey result in these analyses is the sym metry in the effect of am biguit y a v ers ion of eac h line on the zero-reinsu rance threshold w 0 and the optimal barrier b ∗ . F u rthermore, if only Line i is am biguit y a v erse, then it is optimal for the insurer to inte rnalize all th e risk of L ine i when the un derlying reserve v alue reac hes the threshold w 0 . The b eha vior of the v alue function in resp onse to am biguit y av ersion, s h o wn in Figure 11 is consistent with ob s erv ations in F eng et al. ( 2021 ), where the v alue f unction shifts down w ard when at lea st one line is am biguit y a v erse du e to making decisions in the wo rst-case scenario. 0 10 20 30 40 0 10 20 30 40 β 1 β 2 w 0 1 2 3 (a) w 0 0 10 20 30 40 0 10 20 30 40 β 1 β 2 b ∗ 2 3 4 (b) b ∗ Figure 10 : Contour plo t of the reinsurance thresho ld w 0 and the optimal bar r ier b ∗ as a function of the ambiguit y-a v ersion parameters β 1 and β 2 when µ 1 = µ 2 = 2 and σ 1 = σ 2 = 1 . 0 2 4 6 0.0 0.5 1.0 1.5 2.0 2.5 x g ( x ) ( β 1 , β 2 ) : ( 0 , 0 ) ( 0 , 1 ) ( 1 , 0 ) ( 1 , 1 ) 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x π 1 ( x ) ( β 1 , β 2 ) : ( 0 , 0 ) ( 0 , 1 ) ( 1 , 0 ) ( 1 , 1 ) 0.00 0.25 0.50 0.75 1.00 0.0 0.5 1.0 1.5 2.0 2.5 x π 2 ( x ) ( β 1 , β 2 ) : ( 0 , 0 ) ( 0 , 1 ) ( 1 , 0 ) ( 1 , 1 ) Figure 11: V alue function g ( x ) and optimal reinsura nce strategies ¯ π 1 ( x ) , ¯ π 2 ( x ) for v ar ious v alues of β 1 and β 2 when µ 1 = µ 2 = 2 and σ 1 = σ 2 = 1 . The v alue functions a re ident ical when ( β 1 , β 2 ) ∈ { (0 , 1) , (1 , 0) } . T able 3: Impa ct o f the ambiguit y av ersion par a meter (and model uncer taint y ) on the reinsurance thresho ld w 0 and the optimal barr ier b ∗ when µ 1 = µ 2 = 2 and σ 1 = σ 2 = 1. β 1 β 2 w 0 b ∗ 0 0 0.666666 7 1.7945 99 1 0 0.533053 4 1.5688 14 0 1 0.533053 4 1.5688 14 1 1 0.730602 0 2.0343 50 32
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment