High-Density Automated Valet Parking with Relocation-Free Sequential Operations
In this paper, we present DROP, high-Density Relocation-free sequential OPerations in automated valet parking. DROP addresses the challenges in high-density parking & vehicle retrieval without relocations. Each challenge is handled by jointly providi…
Authors: Bon Choe, Minhee Kang, Heejin Ahn
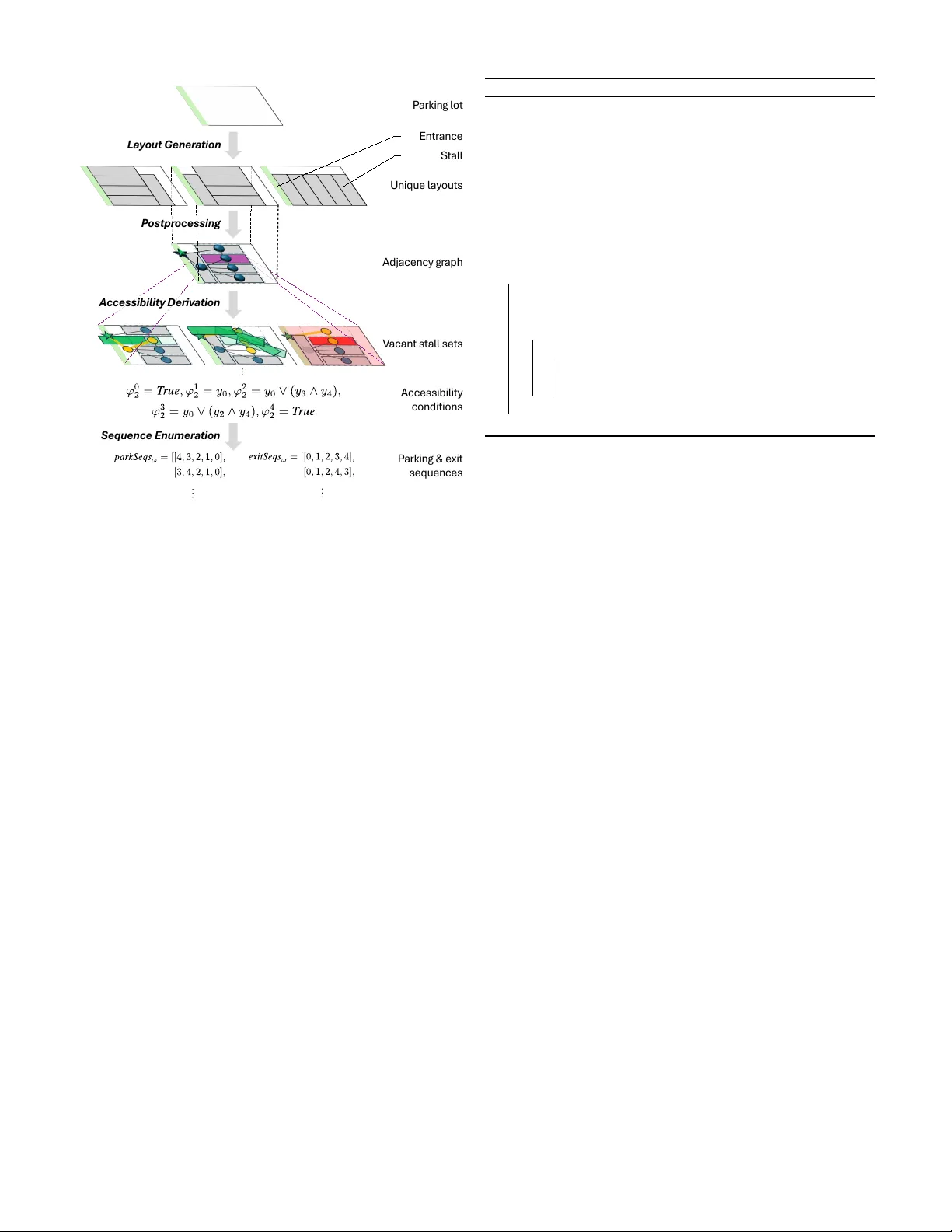
High-Density Automated V alet P arking with Relocation-Free Sequential Operations Bon Choe School of Electrical Engineering KAIST Daejeon, South K orea bonjae@kaist.ac.kr Minhee Kang School of Electrical Engineering KAIST Daejeon, South K orea ministop@kaist.ac.kr Heejin Ahn School of Electrical Engineering KAIST Daejeon, South K orea heejin.ahn@kaist.ac.kr Abstract —In this paper , we present DR OP , high-Density Relocation-free sequential OPerations in automated valet parking. DR OP addr esses the challenges in high-density parking & v ehicle retrie val without r elocations. Each challenge is handled by jointly pro viding area-efficient lay outs and relocation-fr ee parking & exit sequences, considering accessibility with relocation-free sequential operations. T o generate such sequences, relocation-fr ee constraints are formulated as explicit logical conditions expressed in boolean variables. Recursive search strategies are employed to derive the logical conditions and enumerate relocation-free sequences under sequential constraints. W e demonstrate the effectiveness of our framework through extensive simulations, showing its potential to significantly impr ove area utilization with relocation- free constraints. W e also examine its viability on an application problem with prescribed operational order . The results from all experiments are available at: https://drop- park.github .io. Index T erms —automated v alet parking system, high-density parking, relocation-fr ee parking & exit sequences, recursi ve search I . I N T R O D U C T I O N Parking space is a critical bottleneck in fleet operations, especially in urban en vironments where a v ailable land is expensi ve and scarce. Automated valet parking systems (A VPS) enable autonomous vehicle maneuvering and support high- density parking configurations by reducing or eliminating driving aisles and buf fer zones [1], [2]. High-density layouts hav e been sho wn to significantly impro ve area utilization [3], making them attracti ve for increasing depot capacity within existing infrastructure. Howe v er , high-density parking introduces new operational challenges. In tightly packed layouts, vehicles obstruct one another , and parking and retriev al operations occur sequentially . As a result, feasibility becomes order -dependent: whether a vehicle can enter or e xit without relocating others depends not only on the geometric layout but also on the specific parking and exit sequence. In this w ork, we address the joint problem of layout efficiency and relocation-free sequential feasibility . Specifically , we generate high-density parking layouts and characterize the complete set of parking and e xit sequences that can be executed without vehicle relocations. The Authors are with School of Electrical Engineering, Korea Advanced Institute of Science and T echnology (KAIST), Daejeon, Republic of Korea. emails: { bonjae, ministop, heejin.ahn } @kaist.ac.kr Conventional Pa rk in g Lo t ü Exit without r elocations ü Suboptimal area ut ilizat ion High - Density Pa rk in g ü Maximiz ed area ut ilization ü Exit with r elocations DROP ü Maximiz ed area ut ilization ü Sequential exit without r elocat ion 1 st 4 th 6 th 10 th … … … Fig. 1: Comparison of the proposed framework DROP with con ventional parking lot and high-density parking. Prior work has addressed important parts of the A VPS, but has lar gely focused on either layout design or maneuver planning. High-density layout strategies, such as k-Stacks [4] and k-Deques [5], focus on improving storage capacity through structured parking patterns. Maneuv er-centric studies empha- size motion planning and control within fixed facility configura- tions [6], while infrastructure-level formulations analyze design and management trade-offs [7]. Puzzle-based parking [8] is most closely related to our work, as it models the lot as a discrete grid and optimizes storage capacity and retriev al time. Ho wev er , it permits vehicle relocations and does not e xplicitly characterize which sequential parking and exit operations are feasible without relocations. Consequently , existing methods do not systematically characterize relocation-free sequential feasibility in high-density layouts. T o address this gap, we propose DROP , a framework for high- D ensity R elocation-fr ee sequential OP erations in automated v alet parking systems. Gi ven a parking lot dimension, DR OP generates layouts that maximize area utilization and deriv es explicit logical conditions that determine when a parking space can be accessed or retrie v ed without relocations. Based on these conditions, the framework enumerates all relocation-free parking & exit sequences. As an application of DR OP , we further examine whether a gi ven operational order can be complied within the relocation-free sequence set. The main contrib utions of this work are as follows: • W e propose DR OP , a framework for high-density A VPS that generates parking layouts for maximal area utilization together with relocation-free parking and exit sequences. • W e formulate relocation-free constraints as explicit logical conditions, employing recursiv e searches to derive the logical conditions and enumerate all valid sequences satisfying sequential constraints. • W e introduce an application problem that determines whether a prescribed operational order can be realized within the relocation-free sequence set deri ved by DROP . • W e validate DR OP through e xtensi ve simulations across di verse parking lot dimensions, demonstrating its ability to enable high-density parking while providing the complete set of relocation-free parking and exit sequences. The remainder of this paper is or ganized as follows. Sec- tion II presents the motiv ation to introduce our core constraints, leading to problem definitions. Section III describes how algorithms in DROP are designed for solving each problem in Section II. Section IV reports experiment setup and results and Section V concludes the paper . I I . P RO B L E M S TA T E M E N T In this section, we formally state our main problem of interest. W e begin with motiv ation of our main problem, follo wed by defining the problem to be solved by DROP . A. Motivation Consider an A VPS depot operating in an unstructured parking lot. In pursuit of high area utilization, vehicles may be placed in a high-density layout without dedicated dri ving aisles and b uf fer zones. In such en vironment, the relocation-free accessibility of a vehicle is affected by not only the layout geometry , but also the v acancy states of obstructing v ehicles. Additionally , vehicles in fleet operations may be parked and retrieved sequentially: vehicles are parked one by one during a parking phase, later retrie v ed one by one during an exit phase. These observations moti vate our DR OP framework that generates high-density layouts together with its relocation-free parking & exit sequences. Therefore, we state two core constraints: (1) relocation-free constraints and (2) sequential constraints. Based on following constraints, we present the problem definitions. • Relocation-free constraints: F or each vehicle, there e xists at least one kinematically feasible collision-free maneuver path between its allocated parking space and any entrance while only the vehicle mov es and the other vehicles remain stationary (i.e., not relocated). • Sequential constraints: V ehicles are parked and exited sequentially by two phases: a parking phase and an exit phase. First, vehicles are parked one by one during a dedicated parking phase until the lot reaches its capacity . Only after the parking phase is concluded does the exit phase begin, where vehicles are retrieved sequentially , one at a time. The exit phase is concluded when all parked vehicles are retrieved. B. Pr oblem Definition W e consider high-density parking problem with both relocation-free and sequential constraints. The problem is formally stated as below . Problem 1 (Layout Generation and Sequence Enumeration) . Gi ven (1) a rectangular parking lot of width W and length L , (2) an entrance set E of the parking lot and (3) identical vehicles with width a and length b , optimize v ehicle parking spaces and its set of relocation-free parking & exit sequences in a stall indices. As an application of Problem 1, we introduce a practical operational constraint termed the operation order π . This constraint requires that parked vehicles depart from the lot in a sequence dictated by π , which defines a functional mapping between the arriv al order (parking sequence) and the departure order (e xit sequence). With an operation order and N ∗ the maximum number of parked vehicles from the result of Problem 1, we consider the problem of finding a pair of parking and exit sequences that comply with an operation order , as well as relocation-free and sequential constraints. Problem 2 (Application Problem with Operation Order) . Giv en N ∗ vehicles and its operation order π , find a pair of parking and e xit sequences satisfying both relocation-free and sequential constraints. T o clarify , π is a permutation of the vehicle set V with |V | = N ∗ , i.e., a one-to-one mapping π : V → V . Represented as a sequence π = [ π [0] , π [1] , . . . , π [ N ∗ − 1]] , , the index k corresponds to the departure order in the e xit phase, and the value π [ k ] identifies the specific vehicle by its arrival index. In this formulation, π [ k ] = i implies that the v ehicle arrived at i -th order should depart at the k -th order by π . I I I . P R O P O S E D F R A M E W O R K In this section, we describe DROP to solve each problem. As illustrated in Figure 2, Solution 1 is designed to solv e Problem 1 by generating unique layouts, deri ving accessibility conditions and enumerating all relocation-free valid park & exit sequences. Receiving outputs from Solution 1 and operation order π , Solution 2 is designed to solve Problem 2 by checking if a pair of relocation-free parking & e xiting sequences follo wing operation order π e xists. A. Solution 1 Solution 1 takes as input the parking lot dimension (width W , length L ), parking lot entrance set E and vehicle dimension (width a , length b ). The output of this solution is a set of unique layouts Ω ∗ , sets of all v alid parking sequences { parkSeqs ω } ω ∈ Ω ∗ and exit sequences { exitSeqs ω } ω ∈ Ω ∗ . The parking (or exit) sequence is defined as an ordered sequence of parking stall indices, where the parking stall is stripped parking space in the parking layout. T o obtain the output, Solution 1 first generates unique layouts of the parking lot and postprocesses them by b uilding adjacency graphs. Then it deriv es accessibility conditions φ ω = { φ p ω } p ∈P ω for each feasible layout ω by recursiv ely searching vacant stall sets for each stall p in the stall set P ω in layout ω . Based on the deriv ed conditions, all valid parking and exit sequences parkSeqs ω , e xitSeqs ω are calculated following all accessible conditions. P ar ki n g l ot Un i qu e l ay ou t s A dj ac e n c y g r aph L a y ou t G en er a t i on A cce ssi b i l i t y c on di t i on s … V ac an t s t all s e t s A c c e s s i b il it y D e r iv a t i o n P os t p r oces s i n g S eq u en ce E n u m er a t i on P a r k i n g & e x i t s eq u en c es S t al l E nt r a nc e Fig. 2: Ov erview of our DROP framework. 1) Layout Generation and P ostpr ocessing: W e first solve the pallet loading problem [9] to get a set of all optimal layouts Ω that maximize the number of parked vehicles. In our case, the parking lot and the parking stalls – pre-computed parking spaces in the parking lot layout – correspond to a pallet and identical boxes to be packed, respectively . In line 2 of Solution 1, a set of unique layouts Ω ∗ are obtained by filtering the ones in Ω with unique topology after pushing all rectangles to the bottom left direction. T o reduce redundant computations on topologically identical layouts, we proceed further steps with only layouts in Ω ∗ . As a postprocessing, an adjacency graph for each layout ω ∈ Ω ∗ is generated. The adjacenc y graph Adj ( ω , E ) is an undirected, unweighted graph. Its nodes model parking stalls and entrances while edges between two nodes imply their geometrical adjacency . 2) Accessibility Analysis: T o enumerate all v alid parking & exit sequences giv en a parking lot layout, an accessibility condition is defined where each parking stall in the layout satisfies a relocation-free constraint. Since a brute-force search is computationally intractable to find the set of the sequences, we devise the following three steps to reduce computational ov erhead: (1) skipping infeasible layouts, (2) deriving accessi- bility conditions for each stall in ev ery feasible layout, and (3) generating all valid parking & e xit sequences based on these conditions. a) Skipping Infeasible Layouts: W e regard a layout as infeasible if there exists at least one stall f ails to satisfy the relocation-free constraints; i.e., there exists no kinematically Solution 1: Pseudocode to solv e Problem 1 Input: Parking lot dimension (width W , length L ), parking lot entrance set E , vehicle dimension (width a , length b ) Output: A set of unique layouts Ω ∗ , a set of parking sequences { parkSeqs ω } ω ∈ Ω ∗ , a set of exit sequences { e xitSeqs ω } ω ∈ Ω ∗ 1 Solve [9] to get a set of parking lot layouts Ω ; 2 Construct a set Ω ∗ containing only topologically unique parking lot layouts from Ω ; 3 for each parking lot layout ω ∈ Ω ∗ do 4 Build Adjacency graph Adj ( ω, E ) ; 5 if layout ω is not feasible then continue ; 6 for each parking stall p ∈ P ω do 7 for each entrance e ∈ E do 8 Adj ( ω , e ) ← Adj ( ω , E ) \ ( E \ { e } ) ; 9 φ p ω ← φ p ω ∨ getAccessCond ( p, e, Adj ( ω , e )) ; 10 ( parkSeqs ω , e xitSeqs ω ) ← getV alidSequences ( φ ω ) ; 11 retur n (Ω ∗ , { parkSeqs ω } ω ∈ Ω ∗ , { e xitSeqs ω } ω ∈ Ω ∗ ) ; feasible, collision-free maneuv er that connects the stall to any entrance regardless of the vacanc y states of all other stalls. T o ef ficiently identify such layouts, we ev aluate each stall–entrance pair in the constructed adjacency graph using Hybrid A ∗ , which explicitly accounts for vehicle kinematics and collision constraints. W e discard infeasible layouts. For each remaining feasible layout, we retain a direct stall–entrance edge in the adjacency graph and proceed to deri ve the accessibility conditions. b) Deriving Accessibility Conditions: W e define the ac- cessibility condition φ p ω of each stall p ∈ P ω . The accessibility condition is a minimal boolean e xpression describing the va- cancy requirements that guarantees relocation-free accessibility of p . Specifically , it characterizes the minimal sets of other stalls that must remain v acant to ensure a feasible connection between p and at least one entrance. Formally , the accessibility condition is written as φ p ω = W e ∈E W N ∈S ∗ p,e V s ∈ N y s , where y s is a boolean variable indicating whether stall s is v acant (true if v acant), and S ∗ p,e is the set of all minimal vacant stall sets that ensure accessibility of stall p to entrance e : S ∗ p,e = { N ∈ S p,e | ∄ N ′ ∈ S p,e s.t. N ′ ⊂ N } , (1) S p,e = { N | N ∪ { p, e } is connected in Adj ( ω , e ) , HybridA* ( p, e, V \ ( N ∪ { p, e } )) = ∅ ∀ N ⊆ V \ { p, e }} , (2) where V is used as a shorthand for Node ( Adj ( ω , e )) , and HybridA* ( p, e, obstacles ) is the Hybrid A* path planner to find kinematically feasible, collision-free paths from p to e while avoiding collisions with vehicles occupying obstacles . As shown in Algorithm 1, we employ an graph-based r ecursive searc h to efficiently explore the space of stall sets in φ p ω , as well as ensuring discovering all minimal clauses for the accessibility condition. The strategy includes (1) initializing Algorithm 1: getAccessCond ( p, e, Adj ( ω , e ) ) Input: Parking stall p , entrance e , adjacency graph Adj ( ω , e ) Output: Accessibility condition φ 1 visitedSets ← ∅ ; 2 φ ← ⊥ ; // Initialize with empty clauses 3 if ∃ shortest path q in Adj ( ω, e ) fr om p to e then 4 expandConnectedSet ( p, e, Adj ( ω , e ) , Node ( q )) ; 5 sear chDetourP ath ( p, e, Adj ( ω , e ) , Node ( q )) ; 6 retur n φ ; 7 Function expandConnectedSet( p, e, G, N 0 ) : 8 deque ← { N 0 \ { p, e }} ; 9 while deque = ∅ do 10 N ← deque . pop front () ; 11 if N ∈ visitedSets then 12 continue ; 13 visitedSets ← visitedSets ∪ { N } ; 14 if ∃ C ∈ φ such that C ⊆ N then 15 continue ; 16 obstacles ← Node ( G ) \ { N ∪ { p, e }} ; 17 waypoints ← HybridA* ( p, e, obstacles ) ; 18 if waypoints = ∅ then 19 if N = ∅ then φ ← φ ∨ V s ∈ N y s ; 20 else φ ← ⊤ ; // Always true 21 continue ; 22 if obstacles = ∅ then 23 for each neighbor node i of node set N in the graph G \ { p, e } do 24 N + ← N ∪ { i } ; 25 deque . push back ( N + ) ; 26 Function searc hDetourP ath( p, e, G, N 0 ) : 27 for each node i ∈ N 0 \ { p, e } do 28 if ∃ shortest path q i in G \ { i } fr om p to e then 29 expandConnectedSet ( p, e, G, Node ( q i )) ; 30 sear chDetourP ath ( p, e, G \ { i } , Node ( q i )) ; with the shortest path, (2) recursiv ely expanding search to adjacent stalls, and (3) e xploring a detour path. (1) Initializtion with Shortest Path (line 3): The adjacent- based recursiv e search is initialized with φ as ⊥ , implying logical conditions of empty clause. W e initialize the search from the shortest path between stall p and entrance e in the adjacency graph, because our goal is to derive minimal accessibility clauses. Specifically , among the candidate connected node sets that contain { p, e } , the shortest path yields a connected set with the minimum number of nodes. W e therefore begin the recursiv e enumeration with this shortest path (denoted by q ) calculated by Dijkstra’ s algorithm [10]. If no such path exists, then stall p is completely inaccessible from entrance e , and we return φ as ⊥ , i.e., alw ays false . (2) Connected set expansion (line 4): Starting from the nodes on the shortest path, we perform expansions based on breadth-first search (BFS) [11] of candidate connected Algorithm 2: getV alidSequences ( φ ω ) Input: Accessibility conditions φ ω Output: Set of all v alid relocation-free parking and exit sequences ( parkSeqs ω , exitSeqs ω ) 1 ( exitSeqs ω , curr entSeq , exitedSet ) ← ( ∅ , ∅ , ∅ ) ; 2 conds ← φ ω ; 3 enumerateDFS ( curr entSeq , conds , e xitedSet ); 4 parkSeqs ω ← [ re verse ( seq ) for seq ∈ exitSeqs ω ] ; 5 retur n ( parkSeqs ω , exitSeqs ω ) ; 6 Function enumerateDFS(seq, conds, e xitedSet) : 7 if | seq | = |P ω | then 8 Add seq to exitSeqs ω ; 9 retur n ; 10 if ∄ p s.t. conds [ p ] = true then 11 retur n ; 12 for p ∈ P ω do 13 if p / ∈ exitedSet and conds [ p ] = true then 14 newSeq ← seq ; 15 Append p to newSeq ; 16 newConds ← conds | y p = true ; 17 newExitedSet ← exitedSet ∪ { p } ; 18 enumerateDFS ( newSeq , newConds , newExitedSet ); sets to search and identify minimal v acant-stall sets that ensure the accessibility of p with respect to e (Function expandConnectedSet , lines 7 to 25). T o implement BFS, candidate connected sets N are managed using a double- ended queue ( deque ) [12], which ensures that searching connected sets in increasing order of their cardinality . Each candidate connected set N is popped from a deque and ev aluated by running Hybrid A ∗ [13] to check whether a maneuver path exists between stall p and entrance e , while treating all other stalls as obstacles (line 17). If a feasible maneuver exists, we include into φ a conjunctiv e clause of y s ’ s for stall s in current connected set N (line 18). If N = ∅ , implying the stall p is accessible with no v acant stall, φ gets ⊤ , i.e., always true . T o av oid enumerating all connected node sets, the function prunes (i) sets that have already been visited (line 11) and (ii) any candidate that is a superset of an existing clause (line 14), thereby testing only the minimal clauses that compose the accessibility condition (line 11, line 14). (3) Detour path exploration (line 5): T o discover alternativ e routes beyond the current path, we recursi vely explore detours (Function sear chDetourP ath , lines 26 to 30). Specifically , for each intermediate node i ∈ N 0 \ { p, e } on the current path, we temporarily remove i and compute a shortest path q i from p to e in the reduced graph G \ { i } . If such a path exists, we pass its node set Node ( q i ) to expandConnectedSet to continue the minimal-clause search, and then recursi vely call sear chDetourP ath on G \ { i } to further e xplore detours. Solution 2: Pseudocode to solv e Problem 2 Input: Parking lot layout ω , a set of all v alid exit sequences e xitSeqs ω , a set of all v alid parking sequences parkSeqs ω , operation order π Output: A set of parking-e xit sequence pair Σ π ( ω , E ) 1 Σ π ( ω , E ) ← [( parkSeq , exitSeq ) for parkSeq ∈ parkSeqs ω , e xitSeq ∈ exitSeqs ω if π ( parkSeq ) = exitSeq ]; 2 retur n { Σ π ( ω , E ) } ω ∈ Ω ∗ ; 3) Generating V alid Relocation-fr ee Sequences: For each layout ω ∈ Ω ∗ and its accessibility conditions φ ω = { φ p ω } p ∈P ω deriv ed in the previous step, Algorithm 2 first enumerates all valid exit sequences exitSeqs ω satisfying the relocation- free constraints. The algorithm performs a depth-first search [11] that recursively selects a stall p which are not exited yet and whose accessibility condition φ p ω is true under the current v acancy states (line 13). Subsequently , the stall is appended to the current e xit sequence (line 15). If a stall is exited, it is treated as vacant (line 16). For a base case, if a complete sequence covering all stalls is obtained, the sequence is recorded (line 9). On the other base case, if there are no stalls with true accessibility conditions, the search backtracks (line 10). The corresponding parking sequences parkSeqs ω are obtained by reversing each exit sequence (line 4), since vehicles must be parked in the re verse order to preserve the same relocation-free feasibility . parkSeq (or exitSeq ) is represented as a list that the parking (or exiting) v ehicle in k -th order should be park ed in the stall exitSeq [ k ] . B. Solution 2 W e now explain a Solution 2 to solve Problem 2. Given an operation order π , we lev erage valid relocation-free se- quences parkSeqs ω and exitSeqs ω obtained in Section III-A and determine whether π is compatible with layout ω . In particular , we filter parking-exit sequence pairs ( parkSeq , e xitSeq ) ∈ parkSeqs ω × exitSeqs ω that follow op- eration order π . That is, the pairs should meet below condition: π ( parkSeq ) = [ parkSeq [ π [0]] , parkSeq [ π [1]] , . . . , parkSeq [ π [ N − 1]]] = exitSeq (3) where π computes the constrained exit sequence from parking sequence and N is a shorthand for the length of parkSeq or exitSeq (i.e., N = | parkSeq | = | exitSeq | ). The pairs of parking and exit sequences satisfying Equation (3) constitute Σ π ( ω , E ) . I V . S I M U L AT I O N E X P E R I M E N T A. Experiment Setup W e compose experiment environment to ev aluate the per - formance of our proposed method. The en vironment is set up to mimic the scenario of depots for 9 m-length community bus in urban area, where real-estate cost is high and parking T ABLE I: Common Experiment Setup Configurations Parameter V alue Parking lot entrance Entire left boundary of the lot Parking stall size ( a × b ) 3.0 m × 9.5 m V ehicle Size 2.5 m × 9.0 m Front/rear overhang 1.885 m / 2.875 m Wheelbase 4.240 m Steering angle range [ − π / 6 , π / 6] Kinematic model Bicycle model Hybrid A* Max. iterations 10 5 Step size [0 . 5 m , 1 m , 2 m ] Angle resolution π / 36 Operation orders π All circular shifts of vehicle indices space is limited. T o validate our frame work DR OP in v arious parking lot instances, we composed three parking lot instances 15x12 , 20x16 and 20x20 , where each instance name follo ws the format x where and denote the length and width of the parking lot in meter, respectiv ely . All common experiment setup configurations across instances are summarized in T able I. For all parking lot instances, the parking lot entrance is set to be on the entire left boundary of the parking lot as a sole element of E . The parking stall size is set to reserve a tight safety mar gin considering elongated and protruded wing mirrors of b uses. The vehicle is assumed to be park ed right in the center of a stall. The vehicle follows bicycle model [14] as kinematic model and the parking lot entrance is assumed to be on the entire left boundary of the parking lot. The operation orders π are gi ven as all circular shifts of vehicle indices. That is, π is selected to be one among { [0 , 1 , 2 , · · · , |P ω | − 1] , [1 , 2 , · · · , |P ω | − 1 , 0] , · · · , [ |P ω | − 1 , 0 , 1 , · · · , |P ω | − 2] } where |P ω | is the number of vehicles to be parked in the giv en parking lot. As a path planner , hybrid A* [13] is used to generate feasible maneuv er paths for the vehicles in the parking lot. The configuration parameters such as max iterations, step sizes and angle resolution are also specified in T able I. For the cost function f = g + h to be used in hybrid A*, the actual cost g penalizes tra veled distance with a 10% surcharge for re verse motion and a fixed penalty of 0.5 for switching between forward and backward dri ving. The heuristic h combines Euclidean distance to the goal center with an orientation term that penalizes heading misalignment, weighted adaptively (2.5 when within 5 m, 0.3 otherwise) to prioritize correct exit angles near the goal. The motion primiti ves consist of forward and backward motions with discretized steering angles (Unit: rad) within [ − π / 6 , π / 6] . Specifically , the state space is explored with an angle resolution of π / 36 . T o ensure a fine-grained search for collision-free paths, the state space is explored with an angle resolution of π / 36 , and the step size (Unit: m) is adaptiv ely selected from [0 . 5 , 1 , 2] . The optimization problem in line 1 is solved using Gurobi Optimizer [15] to generate parking lot layouts. All experiments are written in C++ language and conducted on a machine with 2 Intel Xeon Gold 6444Y 16-core CPUs and 8 64GB- RAMs. Moreover , Open Multi-Processing (OpenMP) library 0 5 10 15 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 Entrance 0 1 2 3 4 Lay out 1 0 5 10 15 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 Entrance 0 1 2 3 4 Lay out 2 0 5 10 15 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 Entrance 0 1 2 3 4 Lay out 3 Fig. 3: Unique parking lot layouts for the instance 15x12 . 0 5 10 15 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 Lay out 1 0 1 2 3 4 0 5 10 15 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 Lay out 2 0 1 2 3 4 0 5 10 15 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 Lay out 3 0 1 2 3 4 Fig. 4: Adjacency graph for unique layouts for the instance 15x12 . φ 0 2 = T rue φ 1 2 = y 0 ∨ ( y 2 ∧ y 3 ∧ y 4 ) φ 2 2 = y 0 ∨ ( y 3 ∧ y 4 ) φ 3 2 = y 0 ∨ y 4 φ 4 2 = T rue (a) Accessibility conditions y 2 AND y 3 AND y 4 y 3 AND y 4 y 0 0 y 1 4 y 2 2 y 3 3 y 4 1 Free stalls AND nodes Dependent stalls Exit order number (b) Precedence graph Fig. 5: Accessibility deriv ation results in layout 2 of instance 15x12 . [16] is employed to make use of the multiple threads to reduce computation time in iterative loops including Line 3 and Line 6. B. Results In this paper , the results are presented for the instance 15x12 , the one with the simplest and smallest parking lot among all tested instances. All results not sho wn in this paper are av ailable on our project site 1 . Follo wing the steps in DR OP , intermediate results for each step are illustrated. As a result from Solution 1, a set of unique optimal parking lot layouts is obtained by solving pallet loading problem [9] as Figure 3, resulting in three unique layouts. Also, an adjacency graph for obtained layouts is built as Figure 4. In the figure, stall and goal nodes are represented as blue circle and green star , respectiv ely , and adjacent nodes are connected with edges. The accessibility conditions of each stall are also deriv ed by Solution 1. As an example of accessibility deri v ation results, the conditions and its visualization as a precedence graph for layout 2 are presented in Figure 5. As shown in Figure 5a, the accessibility conditions of stalls such as stall 0 and 4 is always true (free stalls), whereas the accessibility conditions of the other stalls consist of a disjunction of conjunctions of stall boolean variables (dependent stalls). A directed edge from 1 https://drop- park.github .io T ABLE II: Relocation-free exit sequence results of instance 15x12 Layout 1 Layout 2 Layout 3 | exitSeqs ω | 56 34 1 T ABLE III: The results from Solution 2 for instance 15x12 Operation Order π Layout 1 Layout 2 Layout 3 [0 , 1 , 2 , 3 , 4] 8 2 0 [1 , 2 , 3 , 4 , 0] 24 2 0 [2 , 3 , 4 , 0 , 1] 48 4 0 [3 , 4 , 0 , 1 , 2] 40 12 0 [4 , 0 , 1 , 2 , 3] 16 26 0 Note: Each cell represents | Σ π ( ω , E ) | for each layout ω and operation order π . y i to y j implies that the y i is included in the accessibility condition of φ j 2 . An AND node denotes a conjuncti ve clause: its outgoing edge becomes acti ve only when all source nodes of its incoming edges are satisfied. In other words, the outgoing condition of an AND node is the logical conjunction of all its incoming predecessor nodes. Based on the deri ved accessibility conditions as Figure 5a, valid exit sequences are found for all unique layouts, summa- rized as T able II. Moreov er , a set of all valid parking sequences parkSeqs ω are also obtained from e xitSeqs ω . Annotated as yello w circle on the superscript on each node in Figure 5b, exitSeq = [0 , 4 , 2 , 3 , 1] is one example of the deriv ed exit sequences for layout 2. exitSeq = [0 , 4 , 2 , 3 , 1] is one example of the deriv ed exit sequences for layout 2. This sequence implies that the exiting vehicle in k -th order should be parked in the stall exitSeq [ k ] . For instance, the first exiting vehicle should be parked in stall 0, and the second exiting vehicle should be park ed in stall 4, and so on. Finally , as a result from Solution 2, a set of relocation-free parking-exit sequences Σ π ( ω , E ) satisfying operation order π are obtained for each operation order π as T able III. Highlighted in bold within the table, there exists valid pairs of parking and exit sequences for layout 1 and 2 gi v en any cyclic operation order , implying two layouts can provide relocation-free parking & exit sequences for any cyclic operation orders. On the contrary , layout 3 have no v alid pairs of parking and exit sequences in all the operation orders due to its low number of v alid sequences. One example of the results from T able III is a pair of parking sequence parkSeq = [4 , 2 , 3 , 1 , 0] ∈ parkSeqs ω and exit sequence π ( parkSeq ) = [0 , 4 , 2 , 3 , 1] ∈ exitSeqs ω , where ω is layout 2 and the operation order π = [4 , 0 , 1 , 2 , 3] . By our frame work, this pair is identified as the one following operation order π while satisfying relocation-free and sequential constraints. Therefore, this guarantees relocation-free parking and exit sequences e ven when coupled with operation order π . In Figure 6, the selected example pair is illustrated with its feasible trajectory in each parking and exiting step. In Figure 6, the first row illustrates the parking sequence parkSeq , while the second row illustrates the exit sequence π ( parkSeq ) . The frame in k -th column for each ro w sho ws the parking and e xiting v ehicle in k -th order , represented as yellow and 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 4 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 2 4 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 3 2 4 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 1 2 3 4 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 0 1 2 3 4 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 1 2 3 4 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 1 2 3 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 1 3 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 1 0 . 0 2 . 5 5 . 0 7 . 5 10 . 0 12 . 5 15 . 0 0 2 4 6 8 10 12 Fig. 6: An example of parking and e xit sequences satisfying operation order π for layout 2 of the instance 15x12 : parkSeq = [4 , 2 , 3 , 1 , 0] , π ( exitSeq ) = [0 , 4 , 2 , 3 , 1] , π = [4 , 0 , 1 , 2 , 3] . green rectangular, respectively . V ehicle footprint and directed trajectory while parking and exiting are also plotted in each frame as transparent rectangulars and green line, respectively . The parking stall index is labeled on the top of each stall. V . C O N C L U S I O N S This paper presented DR OP for high-density automated valet parking with relocation-free sequential operations. DR OP gen- erates capacity-maximizing layouts and derives relocation-free accessibility as explicit boolean conditions, enabling enumera- tion of all v alid parking and e xit sequences under relocation- free and sequential constraints. Giv en an operation order , DR OP further identifies a pair of parking and exit sequences that follo w operation order π while satisfy both relocation- free and sequential constraints by selecting order -consistent parking-exit sequence pairs. Simulation results across multiple parking-lot dimensions show that DROP maintains high area utilization while systematically characterizing relocation-free feasibility , and illustrate when prescribed operational orders are realizable. Future work includes extending the formulation and applying it to settings with interlea ved arriv als and departures in real-world settings. R E F E R E N C E S [1] T . Wieland, “W orld first: Bosch and daimler obtain approv al for driv erless parking without human supervision, ” Press release, Bosch Media Service (US), Jul. 2019, published: 2019-07-22. Accessed: 2026-02-27. [Online]. A vailable: https://us.bosch- press.com/pressportal/ us/en/press- release- 8576.html [2] ——, “Bosch and mercedes-benz sho wcase automated v alet parking at intercontinental los angeles downto wn hotel, ” Press release, Bosch Media Service (US), Mar . 2022, published: 2022-03-21. Accessed: 2026-02-27. [Online]. A vailable: https://us.bosch- press.com/pressportal/ us/en/press- release- 16962.html [3] H. Banzhaf, D. Nienh ¨ user , S. Knoop, and J. M. Z ¨ ollner , “The future of parking: A survey on automated valet parking with an outlook on high density parking, ” in 2017 IEEE Intelligent V ehicles Symposium (IV) . IEEE, 2017, pp. 1827–1834. [4] J. Timpner , S. Friedrichs, J. van Balen, and L. W olf, “k-stacks: High- density valet parking for automated vehicles, ” in 2015 IEEE Intelligent V ehicles Symposium (IV) . IEEE, 2015, pp. 895–900. [5] H. Banzhaf, F . Quedenfeld, D. Nienh ¨ user , S. Knoop, and J. M. Zoellner, “High density valet parking using k-deques in drive ways, ” in 2017 IEEE Intelligent V ehicles Symposium (IV) . IEEE, 2017, pp. 1413–1420. [6] P . d’Orey , J. Azevedo, and M. Ferreira, “ Automated planning and control for high-density parking lots, ” in Pr oceedings of the International Confer ence on Automated Planning and Scheduling (ICAPS) , vol. 27, 2017, pp. 367–372. [7] M. Nourinejad, S. Bahrami, and M. J. Roorda, “Designing parking facilities for autonomous vehicles, ” T ransportation Research P art B: Methodological , vol. 109, pp. 110–127, 2018. [8] P . J. Siddique, K. R. Gue, and J. S. Usher , “Puzzle-based parking, ” T ransportation Researc h P art C: Emerging T ec hnologies , vol. 127, p. 103112, 2021. [9] E. Silva, J. F . Oliveira, and G. W ¨ ascher , “The pallet loading problem: a revie w of solution methods and computational experiments, ” International T ransactions in Operational Resear ch , vol. 23, no. 1-2, pp. 147–172, 2016. [10] E. W . Dijkstra, “ A note on two problems in connexion with graphs, ” Numerische mathematik , vol. 1, no. 1, pp. 269–271, 1959. [11] T . H. Cormen, C. E. Leiserson, R. L. Rivest, and C. Stein, Intr oduction to algorithms . MIT press, 2022. [12] D. E. Knuth, The Art of Computer Pr ogramming: Fundamental Algo- rithms, V olume 1 . Addison-W esle y Professional, 1997. [13] D. Dolgov , S. Thrun, M. Montemerlo, and J. Diebel, “Path planning for autonomous vehicles in unknown semi-structured environments, ” The international journal of robotics r esearc h , vol. 29, no. 5, pp. 485–501, 2010. [14] P . Polack, F . Altch ´ e, B. d’Andr ´ ea Novel, and A. de La Fortelle, “The kinematic bicycle model: A consistent model for planning feasible trajectories for autonomous vehicles?” in 2017 IEEE intelligent vehicles symposium (IV) . IEEE, 2017, pp. 812–818. [15] Gurobi Optimization, LLC, “Gurobi Optimizer Reference Manual, ” 2026. [Online]. A vailable: https://www .gurobi.com [16] L. Dagum and R. Menon, “OpenMP: an industry standard api for shared- memory programming, ” Computational Science & Engineering, IEEE , vol. 5, no. 1, pp. 46–55, 1998.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment