고밀도 자동 발렛 주차의 재배치 없는 순차 운영
본 논문은 고밀도 자동 발렛 주차 시스템에서 차량을 재배치 없이 입·출고할 수 있는 레이아웃과 순차 운영 시퀀스를 자동으로 생성하는 DROP 프레임워크를 제안한다. 레이아웃을 최적화하고, 각 주차칸의 접근 가능성을 불리언 논리식으로 표현한 뒤, 재귀 탐색과 Hybrid A* 경로 계획을 이용해 모든 재배치‑프리 시퀀스를 열거한다. 실험 결과, 기존 방식 대비 면적 활용도가 크게 향상되고, 지정된 출고 순서를 만족하는지 여부를 효율적으로 판단할 …
저자: Bon Choe, Minhee Kang, Heejin Ahn
본 논문은 도시 환경에서 토지 비용이 높은 상황에 대응하기 위해 고밀도 자동 발렛 주차(A VPS) 시스템을 설계하고, 차량을 재배치 없이 입·출고할 수 있는 레이아웃과 순차 운영 시퀀스를 자동으로 생성하는 DROP(High‑Density Relocation‑free sequential OPerations) 프레임워크를 제안한다.
**1. 연구 배경 및 동기**
고밀도 주차는 차량 간 간격을 최소화해 면적 활용도를 크게 높이지만, 차량이 서로를 가로막는 물리적 제약으로 인해 특정 순서에서만 입·출고가 가능하다. 기존 연구는 레이아웃 최적화(k‑Stack, k‑Deque) 혹은 경로 계획에 초점을 맞추었으며, 재배치‑프리 순차 가능성을 체계적으로 분석하지 못했다. 따라서 본 연구는 (1) 재배치‑프리 제약, (2) 순차 입·출고 제약을 동시에 만족하는 레이아웃과 시퀀스를 찾는 문제를 정의한다.
**2. 문제 정의**
- *Problem 1*: 주어진 직사각형 주차장(W, L), 입구 집합 E, 차량 크기(a, b)를 입력으로, 차량을 배치할 수 있는 고유 레이아웃 Ω*와 각 레이아웃에 대해 재배치‑프리 입·출고 시퀀스 집합을 출력한다.
- *Problem 2*: Problem 1의 결과와 차량 수 N* 및 지정된 운영 순서 π(입고 순서와 출고 순서의 일대일 매핑)가 주어질 때, π를 만족하는 재배치‑프리 입·출고 시퀀스 쌍이 존재하는지를 판단한다.
**3. DROP 프레임워크 구조**
DROP은 두 단계로 구성된다.
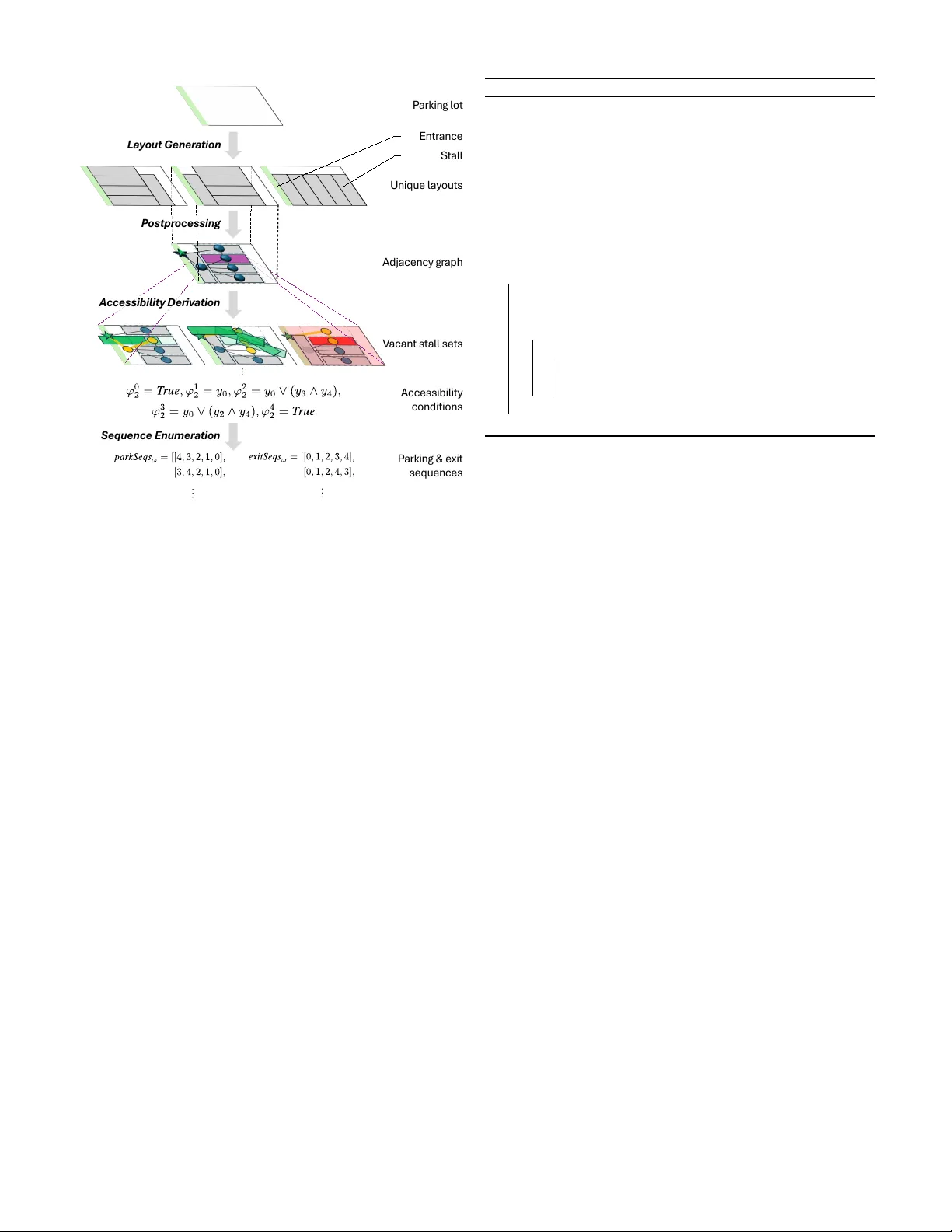
- *Solution 1* (Problem 1 해결):
1) **레이아웃 생성** – 팔레트 적재 문제
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기