Surface-Constrained Offline Warping with Contact-Aware Online Pose Projection for Safe Robotic Trajectory Execution
Robotic manipulation tasks that require repeated tool motion along curved surfaces frequently arise in surface finishing, inspection, and guided interaction. In practice, nominal motion primitives are often designed independently of the deployment su…
Authors: Farong Wang, Sai Swaminathan, Fei Liu
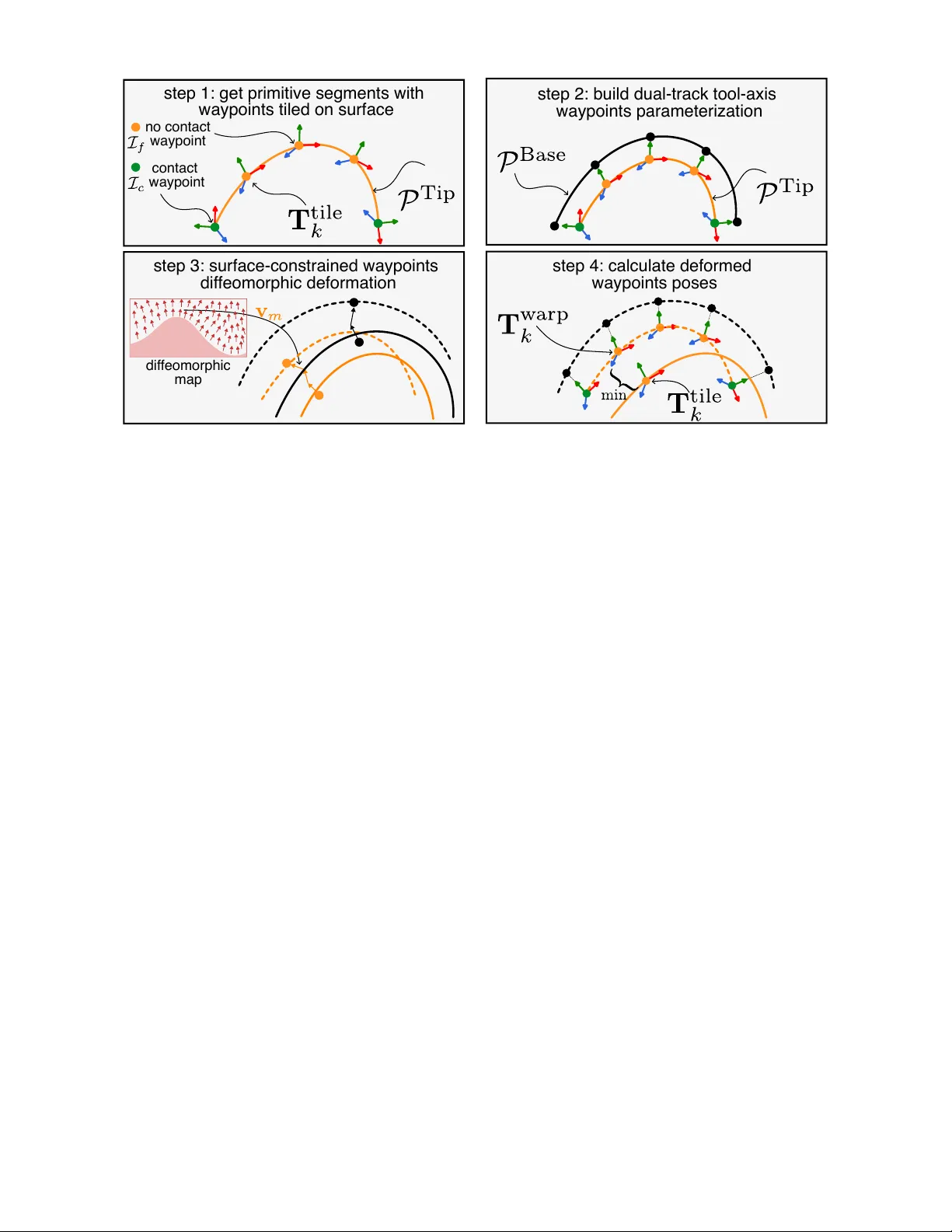
Surface-Constrained Offline W arping with Contact-A war e Online P ose Pr ojection f or Safe Robotic T rajectory Execution Farong W ang 1 , Sai Swaminathan 1 , Fei Liu 1 Abstract — Robotic manipulation tasks that requir e repeated tool motion along curved surfaces frequently arise in surface finishing, inspection, and guided interaction. In practice, nom- inal motion primitives ar e often designed independently of the deployment surface and later reused across varying geometries. Directly tiling such primitives onto nonplanar surfaces intro- duces geometric inconsistencies, leading to interpenetration, orientation discontinuities, and cumulativ e drift over repeated cycles. W e present a two-stage framework that separates geometric embedding from execution-level regulation. An of- fline surface-constrained warping operator embeds a nominal periodic primitive onto curved surfaces through asymmetric diffeomorphic deformation of dual-track waypoints and axis- consistent orientation completion, producing a surface-adapted refer ence trajectory . An online contact-aware pr ojection oper - ator then enforces bounded deviation relative to this reference using FSR-driven disturbance adaptation and a conic orien- tation safety constraint. Experiments across multiple analytic surface families and real-r obot validation on a sinusoidal sur- face demonstrate improv ed geometric continuity , reduced large orientation jumps, and robust contact maintenance compared with direct tiling. These results show that decoupling offline geometric r emapping fr om lightweight online pr ojection enables stable and repeatable surface-embedded trajectory execution under sensor-lite feedbacks. I . I N T R O D U C T I O N Robotic tasks that require a tool to mov e along a curved surface while maintaining consistent contact arise in surface finishing, inspection, and surface-guided manipulation [1], [2], [3]. In man y practical workflo ws, a nominal motion primitiv e, often periodic, is first designed in a canonical frame and later reused across different surface regions or workpieces [4], [5], [6]. Directly replaying or tiling such primitiv es on nonplanar geometries can introduce geometric inconsistencies. Even small mismatches between the prim- itiv e and local surface curv ature accumulate over repeated cycles. This may result in interpenetration, discontinuous orientation changes, and progressiv e drift. The problem is fundamentally geometric. It concerns ho w to transfer struc- tured motion defined in one geometric domain into another while preserving continuity and internal structure. This work was not supported by any organization. 1 All authors are with the Min H. Kao Department of Electrical Engi- neering and Computer Science (EECS), Univ ersity of T ennessee, Knoxville (UTK), Knoxville, TN 37996, USA. { fwang31, sai, feiliu } @utk.edu W e thank undergraduate students in UTK EECS for assistance with system implementation and e valuation: Benjamin Drumwright, T revor Olson (Blender and trajectory visualization), and Be gad Almany (deformable demo building). Fig. 1: Surface-constrained robotic trajectory execution with stable contact. A robotic end-ef fector follo ws a warped periodic trajectory ov er a curved surface using offline geometric warping and online contact-aware projection for stable and drift-free interaction, with applications in polishing, coating, inspection, and surgical assistance. A. Related W orks Prior work has addressed surface interaction from two complementary perspecti ves. The first focuses on geomet- ric path generation or tracking directly on the target sur- face. Surface-aware tool path generation methods compute cov erage-consistent trajectories that respect intrinsic surface geometry [7]. Curved surface path following has also been formulated as a constrained dynamical tracking problem, where model predicti ve controllers enforce surface consis- tency during ex ecution [8]. These approaches assume that the reference trajectory is already surface-consistent and concentrate on online optimization or tracking. A second line of research embeds surface constraints directly into motion representations. Manifold-aware learn- ing and planning methods generate trajectories intrinsically on geometric constraint manifolds. Duan et al. [9] learn rhythmic trajectories under explicit Riemannian constraints, enabling motion generation directly on surface manifolds. Mesh-based mo vement primitiv es encode trajectories intrin- sically on triangulated surfaces using discrete dif ferential geometry operators and geodesic computations [10]. Con- strained planning methods further generate continuous paths that remain on learned or specified manifolds [11]. These approaches incorporate geometric structure during learning or synthesis. Howe ver , they typically assume that demon- strations or policies are already defined intrinsically on the surface. Despite these advances, an important practical scenario re- mains insufficiently addressed. In many manipulation work- flows, nominal motion primitiv es are designed or learned in canonical task frames and later deployed across work- pieces with varying surface geometries. Movement primitiv e representations and dynamical skill models are often con- structed independently of a specific deployment surface and subsequently adapted to new constraints or conte xts [4], [12], [13], [14]. Geometry-aware tracking research further empha- sizes that geometric structure must be explicitly considered to maintain consistency and manipulability during motion transfer [15]. When such primitiv es are applied directly to curved geometries without geometric embedding, struc- tural incompatibilities arise. Re-learning or re-synthesizing surface-intrinsic motion for each ne w geometry can be computationally expensi ve or data-intensive. What is missing is a principled embedding mechanism that resolves global incompatibility before ex ecution while preserving structural properties such as periodicity and axis consistenc y . Recent work has explored geometric policy transportation and diffeomorphic motion mappings to generalize manipula- tion skills across task configurations. Franzese et al. [16] learn nonlinear transportation maps that deform demon- strated policies between geometric domains through ke ypoint correspondences. Gao et al. [17] formulate inv ertible and continuously differentiable motion mappings for workspace adaptation in teleoperation. These approaches sho w that structured geometric transformations can preserve position, velocity , and orientation consistency during motion transfer . Howe ver , they primarily address policy transfer between task configurations rather than structured embedding of periodic motion primitiv es onto curved constraint manifolds under persistent contact. Safety-aware ex ecution methods, such as conic control barrier functions, bound orientation deviations within pre- scribed feasible sets during execution [18], [19]. These methods provide guarantees on bounded orientation error . Howe ver , they operate at the control layer and do not resolve geometric mismatch between a nominal motion primiti ve and a curved surface. W ithout an explicit embedding step, online tracking must continuously compensate for this mismatch. This increases correcti ve effort and may lead to drift over repeated cycles. The gap moti vates a principled separa- tion between of fline geometric embedding and lightweight, contact-aware online projection. B. Our Contrib ution In this work, we decompose the problem into two struc- tured stages. First, we introduce a surface-constrained of- fline warping operator that embeds a nominal periodic primitiv e onto a curved surface through diffeomorphic de- formation with asymmetric track weighting and minimum- change orientation completion. This step resolves global geometric incompatibility while preserving internal structure such as periodicity and axis alignment. Second, we develop a contact-aware online projection operator that bounds deviation from the embedded reference through disturbance- triggered adjustment and a reference-centered conic orienta- tion constraint, ensuring safe and drift-free execution during repeated surface interaction. By separating offline embedding from online projection, the frame work enables stable surf ace- embedded ex ecution under sensor-lite conditions without requiring prior surface-gripper calibration. Our contrib utions are summarized as follo ws: • A surface-constrained of fline warping formulation for embedding periodic motion primitives onto curved sur- faces while preserving structural properties. • A contact-aware online projection mechanism that bounds deviation and suppresses drift during repeated surface interaction. • A two-stage execution frame work that separates geo- metric embedding from online regulation, enabling safe operation with contact-sensor feedback and v alidation on real robotic e xperiments. I I . M E T H O D O L O G Y gravity nominal trajectory of fl ine warping online projection Fig. 2: Problem formulation and execution pipeline. A nominal periodic trajectory T nom is first adapted to a surface-embedded guide curve γ ( s ) through the offline warping operator W Φ , producing a surf ace-consistent warped trajectory T warp (orange). During execution, an online projection operator E constrains the executed pose T pro j within a conic feasible set around the warped orientation while regulating position along gravity using contact-feedback measurements. This two-stage formulation separates offline geometric embedding from online safety-constrained execution. A. Pr oblem F ormulation W e assume an offline-defined surface-embedded guide curve γ ( s ) ⊂ S representing the locus of desired contact points on a smooth surface S , as shown in Fig. 2. This curve encodes where periodic contact should occur and serves as the geometric backbone for trajectory generation. Giv en γ ( s ) , a remapped trajectory is constructed through the of fline warping operator introduced in Section II-B. Starting from a predefined nominal periodic motion T nom = ( R nom , p nom ) ∈ S E (3) , a surface-adapted pose sequence T warp = ( R warp , p warp ) ∈ S E (3) is generated via a surface-constrained warping of the nominal periodic motion along γ ( s ) . This produces a periodic motion embedded on the surf ace (i.e., the orange trajectory in Fig. 2). During online projection, the executed pose T pro j = ( R pro j , p pro j ) ∈ S E (3) is constrained such that its contact step 2: build dual-track tool-axis waypoints parameterization step 1: get primitive segments with waypoints tiled on surface contact waypoint no contact waypoint step 3: surface-constrained waypoints dif feomorphic deformation dif feomorphic map step 4: calculate deformed waypoints poses Fig. 3: Offline surface-constrained warping pipeline. Step 1 extracts a single-period primitive and tiles its waypoints along a surface guide curve, separating contact ( I c , green waypoints) and free-space ( I f , orange waypoints) samples. Step 2 constructs a dual-track tool-axis parameterization using coupled base and tip waypoints. Step 3 applies a surface-constrained diffeomorphic deformation driven by local surface geometry . Step 4 constructs the final warped pose sequence T warp k by combining the deformed waypoints (with contact-critical waypoints anchored) with axis-consistent orientation completion. axis remains within a conic feasible set of half-angle θ centered at the warp direction, C = R pro j ∈ S O (3) ∠ R pro j e c , R warp e c ≤ θ , (1) where e c ∈ R 3 , ∥ e c ∥ = 1 , denotes the canonical contact- direction unit vector expressed in the tool frame (e.g., the principal axis of a cylindrical end-effector). Although the cone is centered at the offline warped orientation R warp , the constraint is enforced online to bound orientation deviation and prev ent cumulativ e drift over repeated periodic embed- dings. Meanwhile, the position is adjusted along the gra vity direction ˆ g using contact-feedback measurements (e.g., from a force-sensing resistor, FSR) to maintain persistent surface contact. T ogether, the resulting framew ork consists of two opera- tors: an offline w arping operator W Φ and an online projection operator E that enforces conic safety constraints during ex ecution, T warp = W Φ ( T nom ) , T pro j = E ( T warp , F , ˆ g ) , (2) where W Φ produces a surface-adapted trajectory from offline warping, and E generates the executed pose online under FSR-contact sensor reading F , along the gravity direction ˆ g . B. Offline Surface-Constrained W arping Operator W Φ The offline surface-constrained warping operator W Φ transforms a tiled periodic primitive into a surface-consistent warped trajectory through a structured four-step procedure (Fig. 3). Specifically , we (i) extract a single-period primitive with associated waypoints and tile it along a surface guide curve, (ii) construct a dual-track tool-axis parameterization via tip and base waypoints, (iii) apply an asymmetric surface- constrained dif feomorphic deformation driven by local sur- face geometry to impro ve feasibility while preserving contact structure, and (iv) construct a smooth warped pose sequence via axis-consistent orientation completion. This staged for- mulation cleanly separates geometric embedding from pose construction and produces a stable surface-adapted trajectory for e xecution. 1) Step 1: Primitive Se gment Extraction and Surface- Based T iling: W e begin with a contact-rich nominal periodic motion T nom and extract a single-period primiti ve segment together with its associated waypoints. Given a surface- embedded guide curve γ ( s ) ⊂ S (or its discrete samples), we tile repeated instances of the primitiv e along the guide to obtain an initial surface-consistent placement (Fig. 2). In practice, we compute cumulati ve arc length along the guide and select approximately equal-distance tile centers within a prescribed tolerance. Each repeated period is aligned using the local chord direction between consecuti ve centers, producing an initial tiled pose sequence { T tile k } K k =1 . From this sequence, we extract the tool-tip trajectory implied by the tiled poses and denote it as the tip-motion track P Tip = { p Tip k } K k =1 , which serv es as the geometric carrier prior to refinement. The tiled samples naturally divide into two waypoint types according to their contact role in the original demonstration: contact waypoints and non-contact waypoints. W e encode this distinction using a contact-critical index set I c ⊂ { 1 , . . . , K } and a complementary free-space index set I f = { 1 , . . . , K } \ I c , corresponding to the green (contact) and orange (non-contact) points sho wn in Step 2 of Fig. 3. Although tiling captures the intended periodic placement along the guide, it does not explicitly account for local surface geometry . Consequently , poses determined solely by guide alignment may violate contact feasibility or exhibit non-smooth orientation v ariation in regions of high curv ature or local concavity , motiv ating the deformation step described next. 2) Step 2: T ool-Axis P arameterization via Dual-T rac k W aypoints: Building on the tip-motion track obtained in Step 1, we represent the primitive using a tool-axis parame- terization defined by tw o coupled waypoint trajectories: the tip track P Tip = { p Tip k } K k =1 and the base track P Base = { p Base k } K k =1 (Step 2 in Fig. 3). The base track is obtained directly from the translational component of the tiled poses, while the tip track represents the desired tool-tip motion extracted in Step 1. T ogether , these two tracks encode the primitiv e geometry in a geometry-a ware manner . At each sample k , the v ector connecting the base and tip waypoints defines the instantaneous tool-axis direction after normalization. T o ensure numerical stability , we require the baseline magnitude to exceed a small threshold; otherwise, the most recent valid axis direction is reused. This dual- track representation provides a compact and geometrically consistent description of the primiti ve that supports stable subsequent deformation. 3) Step 3: Surface-Constrained Diffeomorphic Deforma- tion: T o improv e geometric feasibility while preserving contact structure, we apply a smooth deformation map Φ : R 3 → R 3 to jointly remap the dual tracks into a surface- consistent configuration. The deformation is generated from the local surface geometry: specifically , the incremental deformation field is constructed using the surface normal direction at each spatial sample, so that corrections primarily act along the normal while preserving tangential structure. This encourages samples that violate contact feasibility to mov e to ward the surface without introducing unnecessary lateral distortion. The deformation is implemented as a composition of incremental updates, Φ = ( ϕ 1 ◦ · · · ◦ ϕ m ) , ϕ m ( p ) = p + v m ( p ) , (3) where p ∈ R 3 denotes a spatial sample and v m ( p ) is a smooth normal-dri ven correction field derived from the local surface geometry at each update. Rather than deforming both tracks from Step 2 identically , we apply track-dependent strengths so that the tip and base trajectories respond differently to geometric corrections, ϕ ( j ) m ( p ) = p + λ ( j ) ( p ) v m ( p ) , j ∈ { Tip , Base } . (4) This asymmetric design improv es both positional feasibility and orientation continuity under surface constraints: stronger corrections on the tip track enforce surface-consistent con- tact, while milder adjustments on the base track prevent excessi ve axis rotation and preserve smooth orientation ev o- lution. Applying the resulting dif feomorphic maps to both tracks from Step 2 yields the warped trajectories ˜ p ( j ) k = Φ ( j ) ( p ( j ) k ) , j ∈ { Tip , Base } , which serve as geometrically consistent inputs for refer- ence pose construction in the next step. T o preserve task semantics, contact-critical samples ( k ∈ I c ) remain anchored during deformation, while only samples in I f are updated. 4) Step 4: P ose Construction under Φ : Using the warped dual-track waypoints obtained in Step 3, we construct the final pose sequence under the deformation operator Φ . The warped tip track directly defines the position sequence, p warp k = ˜ p Tip k (5) The vector connecting the warped base and tip waypoints defines the tool-axis direction after normalization. If the baseline magnitude falls below a small threshold, we reuse the pre vious valid axis direction to ensure numerical stability . Since the tool-axis direction (the green axes in Fig. 3) alone does not uniquely determine an element of S O (3) , one rotational de gree of freedom remains unconstrained. T o ensure smooth and consistent orientation ev olution, we resolve this ambiguity using a minimum-change completion rule: R warp k = arg min R ∈ S O (3) d ( R , R tile k ) (6) This selects, among all feasible orientations aligned with the tool axis, the one closest to the tiled pose, thereby suppress- ing unnecessary rotation and ensuring temporal smoothness. T ogether with the position in Eq. 5, the resulting warped pose sequence is T warp k = R warp k , p warp k . (7) Across Steps 1–4, the of fline warping operator W Φ maps the nominal trajectory to the warped trajectory as T warp = W Φ ( T nom ) . (8) C. Online Execution E Giv en the offline warp pose T warp k = ( R warp k , p warp k ) ∈ S E (3) , the online operator E generates the projected pose T pro j k = ( R pro j k , p pro j k ) ∈ S E (3) by combining FSR-driven local disturbance correction with an always-on conic safety filter: T pro j k = E ( T warp k , F k , ˆ g ) . (9) As illustrated in Fig. 4, the online operator proceeds in two stages. First, FSR feedback generates a local candidate pose ( R FSR k , p FSR k ) : insufficient force causes the tool to mo ve downw ard and rotate toward gra vity , whereas excessiv e force causes it to mov e upward and rotate aw ay from gravity . Second, an always-on conic filter compares the candidate tool axis u can k with the warp axis u warp k and applies a bounded correction to produce the final projected orientation R pro j k . 1) FSR-Driven Disturbance Candidate Generation: At each step, we ev aluate the contact error relative to the desired FSR le vel: e k = F k − F ⋆ . (10) If | e k | ≤ ε F , no disturbance correction is applied, i.e., ∆ p fsr k = 0 and ∆ R fsr k = I , so that T FSR k = T warp k . gravity project into cone FSR-driven disturbance moving down project into cone FSR-driven disturbance moving up Fig. 4: Contact-awar e online projection under FSR-dri ven disturbances. Force feedback perturbs the w arped pose T warp k : lo w force dri ves do wnward motion, while high force driv es upward motion. The disturbed pose is then projected into the conic feasible set, yielding T pro j k with bounded orientation deviation and stable contact. Otherwise, we generate bounded translational and rota- tional disturbance increments around the warp pose. The candidate translation is defined by p FSR k = p warp k + ∆ k ˆ g , ∆ k = sat κ p e k , (11) where ˆ g is the prescribed correction direction, chosen as the gra vity direction in our implementation, κ p is the trans- lational gain, and sat( ξ ) = min(∆ max , max( − ∆ max , ξ )) bounds the correction magnitude. Let u warp k = R warp k e c denote the warp tool axis, where e c is the designated tool-axis basis vector in the local tool frame. W e define the FSR-induced rotation axis by a fsr k = u warp k × ˆ g ∥ u warp k × ˆ g ∥ + ϵ , (12) and compute the bounded disturbance angle δ fsr k = sat( κ R e k ) , | δ fsr k | ≤ δ fsr max . (13) The candidate orientation is then R FSR k = exp − [ δ fsr k a fsr k ] × R warp k . (14) Accordingly , the FSR-driv en candidate pose is T FSR k = ( R FSR k , p FSR k ) . (15) By construction, the candidate reduces to the warp pose in- side the deadband and becomes a bounded local disturbance otherwise. 2) Always-On Conic Safety Constraints: The conic filter is activ e at every step and acts only on orientation. Its role is to bound the de viation of the disturbed candidate orientation from the offline warp without removing the FSR- driv en compliance entirely . Let u can k = R FSR k e c denote the candidate tool axis, and define the axis deviation angle by ϕ k = ∠ ( u can k , u warp k ) . The admissible orientation set is gi ven by a cone of half- angle θ centered at u warp k . Whenev er the candidate axis approaches or exceeds the cone boundary , the filter generates a bounded pushback rotation to ward the warp axis. Using the correction axis a cone k = u can k × u warp k ∥ u can k × u warp k ∥ + ϵ , (16) the filtered orientation is computed as R pro j k = exp [ δ cone k a cone k ] × R FSR k , 0 ≤ δ cone k ≤ δ cone max . (17) Here δ cone k is a nonne gati ve correction magnitude that in- creases as the candidate approaches or exceeds the conic boundary . Since the conic filter modifies only orientation, we set p pro j k = p FSR k . (18) The final projected pose is therefore T pro j k = R pro j k , p pro j k . (19) This composition preserves local translational contact adap- tation while preventing excessi ve rotational drift away from the of fline warp. Fig. 5: Collision-prone configurations under direct tiling. First row: tiled ( T tile ). Second ro w: warped ( T warp ). Direct tiling remains feasible on the conv ex surface but becomes collision-prone on the concave surface due to an unsafe local attitude. Offline warping produces a surface- consistent trajectory that av oids this failure mode. Fig. 6: Continuity correction on a conv ex surface. First row: tiled . Second row: warped . Compared with direct tiling, the warped trajectory yields smoother and more monotone local pose evolution along the same guide neighborhood. Fig. 7: Real-robot validation under disturbances and abrupt height reduction. The proposed FSR-conic Projection improves contact consistency during disturbed execution and recovers from sudden surface-height reduction through translational adaptation, while conic filtering maintains bounded orientation deviation throughout the motion. I I I . E X P E R I M E N T S W e ev aluate the proposed two-stage framew ork from two perspectiv es. Of fline, we verify that W Φ resolves the main failure modes of direct periodic tiling and produces surface- consistent warped trajectories. Online, we validate that E improv es contact rob ustness on a real robot under designed disturbances and abrupt en vironment change. A. Offline Geometric V alidation W e compare direct tiling ( T tile ) with offline warping ( T warp ). On non-planar surfaces, direct tiling exhibits two main failure modes that limit reliable execution: collision- prone attitudes in conca ve regions and non-smooth local pose ev olution along the guide. The offline operator W Φ reshapes the tiled sequence into a surface-consistent warped trajectory that addresses both. Figure 5 illustrates the first failure mode. In the con vex case (left), direct tiling remains feasible and follows the intended guide without obvious geometric conflict. In the concav e case (right), howe ver , the same tiling strategy pro- duces an unsafe attitude that collides with the local surface, ev en though the tool tip remains close to the desired guide. The second ro w shows the corresponding warped trajectory . After offline warping, the pose sequence becomes surface- consistent and av oids this unsafe configuration. The second failure mode is local discontinuity . Even when no collision occurs, tiled can exhibit reciprocal or back- and-forth pose changes within the same guide neighborhood, leading to non-monotone orientation e volution. Figure 6 compares tiled and warped on a con ve x surface. Direct tiling produces irre gular local pose progression, whereas offline warping yields a smoother and more monotone se- quence while preserving the intended periodic embedding. T o quantify this improv ement, we perform a parameter- sweep ev aluation over five analytic surface families ( sin / cos / exp / parabolic / cubic ) using paired tiled / warped trajectories. For each trajectory , we compute the per-step angular change ∆ θ k = d ( q k +1 , q k ) , and report two continuity metrics: the 95th-percentile angular step d θ p 95 and the bad-step rate P (∆ θ k > 10 ◦ ) , which captures the large rotational jumps responsible for local oscillation. T able I reports paired trajectory-le vel aggregates. Across all surface families, warped reduces large rotation-step outliers, with the strongest improvement on higher-curv ature families such as sin and cos . On cubic , the gain is mar ginal because direct tiling already exhibits near-zero discontinuity . T ABLE I: Surface-family continuity summary (warped vs. tiled). #Pair denotes the number of paired tiled/warped trajectories, and #Step denotes the total number of e valuated pose transitions from the tiled trajectories. Median ∆(d θ p 95 ) (deg) is warped minus tiled (negati ve is better). BadRot t / BadRot w are the average fractions of steps with ∆ θ k > 10 ◦ for tiled / warped . Surf. #P air #Step Med. ∆(d θ p 95 ) BadRot t BadRot w ∆ cos 4 463 -14.98 0.093 0.000 0.093 cubic 1 98 -0.05 0.000 0.000 0.000 exp 3 1121 -0.99 0.005 0.000 0.005 parabolic 4 436 -6.77 0.037 0.000 0.037 sin 4 471 -16.59 0.125 0.016 0.109 Overall, the of fline results show that W Φ remov es the two main geometric blockers of direct tiling—collision-prone attitudes and oscillatory discontinuities—while substantially improving orientation continuity across div erse surfaces. B. Online Real-Robot V alidation W e validate the online operator E directly on hardware, since its purpose is to improve contact robustness using minimal sensing during execution. W e use a representative sinusoidal surface, whose rapidly varying local normal am- plifies tracking error and makes open-loop warp execution particularly challenging. Figure 7 summarizes the real-robot results. The top row shows pure execution of the offline warp trajectory with- out online correction. Although the warp trajectory itself is geometrically feasible, the resulting contact quality is unev en, with especially lar ge mismatch around the π / 2 region and only partial agreement in other intended contact segments. The middle ro w sho ws ex ecution of the same warp trajectory with the proposed online operator enabled. Under intentionally injected FSR-coupled disturbances, the robot maintains contact more consistently across the intended contact segments, indicating that online disturbance correc- tion impro ves local adaptation while the conic filter bounds orientation de viation around the warp trajectory . The bottom row of Fig. 7 ev aluates robustness under abrupt height reduction. During execution, we remov e the support base to lower the surface unexpectedly . The robot recov ers contact through translational adaptation, while the conic filter pre vents excessi ve rotational drift even under large disturbance. This result shows that the online opera- tor can tolerate sudden en vironment change without losing bounded-orientation safety . T aken together, the real-robot results sho w that E impro ves contact robustness using only a 1D FSR signal, while the warp-centered conic filter provides non-drifting orientation safety under both designed disturbances and abrupt en viron- ment change. C O N C L U S I O N W e presented a two-stage framew ork for executing peri- odic end-effector skills on curved surfaces with continuous pose e volution and bounded orientation de viation under contact. Offline, the warping operator W Φ resolves collision- prone attitudes and local oscillatory orientation changes caused by direct tiling on non-planar surfaces. Online, the ex ecution operator E improves contact robustness through bounded local correction, while a warp-centered conic filter limits orientation drift relati ve to the warped reference. Across 32 trajectories over fi ve analytic surface families and real-robot experiments on a sinusoidal surface, the results support the effecti veness of the proposed frame work. Fig- ure 8 further illustrates representati ve offline warping results across dif ferent surface geometries. Fig. 8: Representative simulation r esults of offline warping . Examples compare tiled ( T tile ) and warped ( T warp ) trajectories. Direct tiling may produce collision-prone or geometrically inconsistent poses near complex surface regions, whereas of fline warping yields surface-consistent and smoother motion. R E F E R E N C E S [1] R. W u, S. Gholami, T . Bonato, and A. Billard, “Human-inspired planning and control of shotcrete robots based on dynamical systems mapping, ” in 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IR OS) , 2025, pp. 4897–4904. [2] S. Schneyer , A. Sachtler, T . Eiband, and K. Nottensteiner, “Segmenta- tion and coverage planning of freeform geometries for robotic surface finishing, ” IEEE Robotics and Automation Letters , vol. 8, no. 8, pp. 5267–5274, 2023. [3] F . Tian, C. Lv , Z. Li, and G. Liu, “Modeling and control of robotic automatic polishing for curved surfaces, ” CIRP Journal of Manufac- turing Science and T ec hnology , vol. 14, pp. 55–64, 2016. [4] M. Sav eriano, F . J. Abu-Dakka, A. Kramberger, and L. Peternel, “Dynamic mov ement primitives in robotics: A tutorial survey , ” The International Journal of Robotics Researc h , vol. 42, no. 13, pp. 1133–1184, 2023. [Online]. A vailable: https://doi.org/10.1177/02783649231201196 [5] C. Unger , C. Hartl-Nesic, M. N. V u, and A. K ugi, “Prosip: Proba- bilistic surface interaction primitives for learning of robotic cleaning of edges, ” in 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IR OS) , 2024, pp. 5956–5963. [6] L. Han, H. Y uan, W . Xu, and Y . Huang, “Modified dynamic movement primitiv es: Robot trajectory planning and force control under curved surface constraints, ” IEEE T ransactions on Cybernetics , vol. 53, no. 7, pp. 4245–4258, 2023. [7] Y . W en, D. J. Jaeger, and P . R. Pagilla, “Uniform cov erage tool path generation for robotic surface finishing of curved surfaces, ” IEEE Robotics and Automation Letters , vol. 7, no. 2, pp. 4931–4938, 2022. [8] J. C. Santos, L. Cuau, P . Poignet, and N. Zemiti, “Decoupled model predictiv e control for path following on complex surfaces, ” IEEE Robotics and Automation Letters , vol. 8, no. 4, pp. 2046–2053, 2023. [9] A. Duan, W . Liuchen, J. W u, R. Camoriano, L. Rosasco, and D. Navarro-Alarcon, “Learning rhythmic trajectories with geometric constraints for laser-based skincare procedures, ” IEEE T ransactions on Robotics , vol. 41, pp. 1956–1973, 2025. [10] M. D. V edove, F . J. Abu-Dakka, L. Palopoli, D. Fontanelli, and M. Sav eriano, “Meshdmp: Motion planning on discrete manifolds using dynamic movement primitiv es, ” in 2025 IEEE International Confer ence on Robotics and Automation (ICRA) , 2025, pp. 895–901. [11] E. Canzini, S. Pope, and A. Tiwari, “Generating continuous paths on learned constraint manifolds using policy search, ” in 2024 IEEE/RSJ International Conference on Intellig ent Robots and Systems (IR OS) , 2024, pp. 5396–5401. [12] F . Frank, A. Paraschos, P . van der Smagt, and B. Cseke, “Constrained probabilistic movement primiti ves for robot trajectory adaptation, ” IEEE T ransactions on Robotics , vol. 38, no. 4, pp. 2276–2294, 2022. [13] T . Davche v , K. S. Luck, M. Burke, F . Meier, S. Schaal, and S. Ra- mamoorthy , “Residual learning from demonstration: Adapting dmps for contact-rich manipulation, ” IEEE Robotics and Automation Letters , vol. 7, no. 2, pp. 4488–4495, 2022. [14] T . Kulak, J. Silverio, and S. Calinon, “Fourier movement primiti ves: an approach for learning rhythmic robot skills from demonstrations, ” in Pr oceedings of Robotics: Science and Systems , Corvalis, Oregon, USA, July 2020. [15] N. Jaquier, L. Rozo, D. G. Caldwell, and S. Calinon, “Geometry-aware manipulability learning, tracking, and transfer , ” The International J ournal of Robotics Resear ch , v ol. 40, no. 2-3, pp. 624–650, 2021, pMID: 33994629. [Online]. A vailable: https://doi.org/10.1177/0278364920946815 [16] G. Franzese, R. Prakash, C. D. Santina, and J. Kober , “Generalizable motion policies through ke ypoint parameterization and transportation maps, ” IEEE T ransactions on Robotics , vol. 41, pp. 4557–4573, 2025. [17] X. Gao, J. Silverio, E. Pignat, S. Calinon, M. Li, and X. Xiao, “Motion mappings for continuous bilateral teleoperation, ” IEEE Robotics and Automation Letters , vol. 6, no. 3, pp. 5048–5055, 2021. [18] Z. Shen, M. Saveriano, F . J. Abu-Dakka, and S. Haddadin, “Safe execution of learned orientation skills with conic control barrier functions, ” 2024. [19] T . Ibuki, S. W ilson, A. D. Ames, and M. Egerstedt, “Distributed collision-free motion coordination on a sphere: A conic control barrier function approach, ” IEEE Control Systems Letters , vol. 4, no. 4, pp. 976–981, 2020.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment