곡면 제약 오프라인 워핑과 접촉 인식 온라인 투영을 통한 안전 로봇 궤적 실행
본 논문은 주기적인 도구 움직임을 곡면에 맞게 변형하는 두 단계 프레임워크를 제안한다. 오프라인에서는 비대칭 디포모픽 변형을 이용해 명시적인 표면 제약을 만족하도록 원시 궤적을 워핑하고, 온라인에서는 FSR 센서 기반 교정과 원뿔형 자세 안전 제약을 통해 실행 중 편차를 제한한다. 실험 결과, 직접 타일링 방식에 비해 기하학적 연속성, 자세 급변 방지, 접촉 유지 측면에서 우수함을 보였다.
저자: Farong Wang, Sai Swaminathan, Fei Liu
본 논문은 곡면 위에서 반복적인 도구 동작을 수행해야 하는 로봇 매니퓰레이션 문제를 다루며, 기존에 설계된 주기적 작업 프리미티브를 다양한 곡면에 그대로 적용할 경우 발생하는 기하학적 불일치(표면 침투, 자세 불연속, 누적 드리프트)를 해결하고자 한다. 이를 위해 저자들은 ‘오프라인 표면 제약 워핑’과 ‘온라인 접촉 인식 투영’이라는 두 단계로 구성된 프레임워크를 제안한다.
1. 문제 정의와 목표
- 표면 위에 정의된 가이드 곡선 γ(s)를 따라 도구 팁이 지속적으로 접촉해야 함.
- 원시 주기 궤적 T_nom = (R_nom, p_nom) 은 표면과 무관하게 설계됨.
- 목표는 T_nom 을 표면에 맞게 변형시켜 T_warp 을 만든 뒤, 실행 중에 T_warp 과의 편차를 제한하면서 안전하게 따라가도록 하는 것.
2. 오프라인 표면 제약 워핑 (W_Φ)
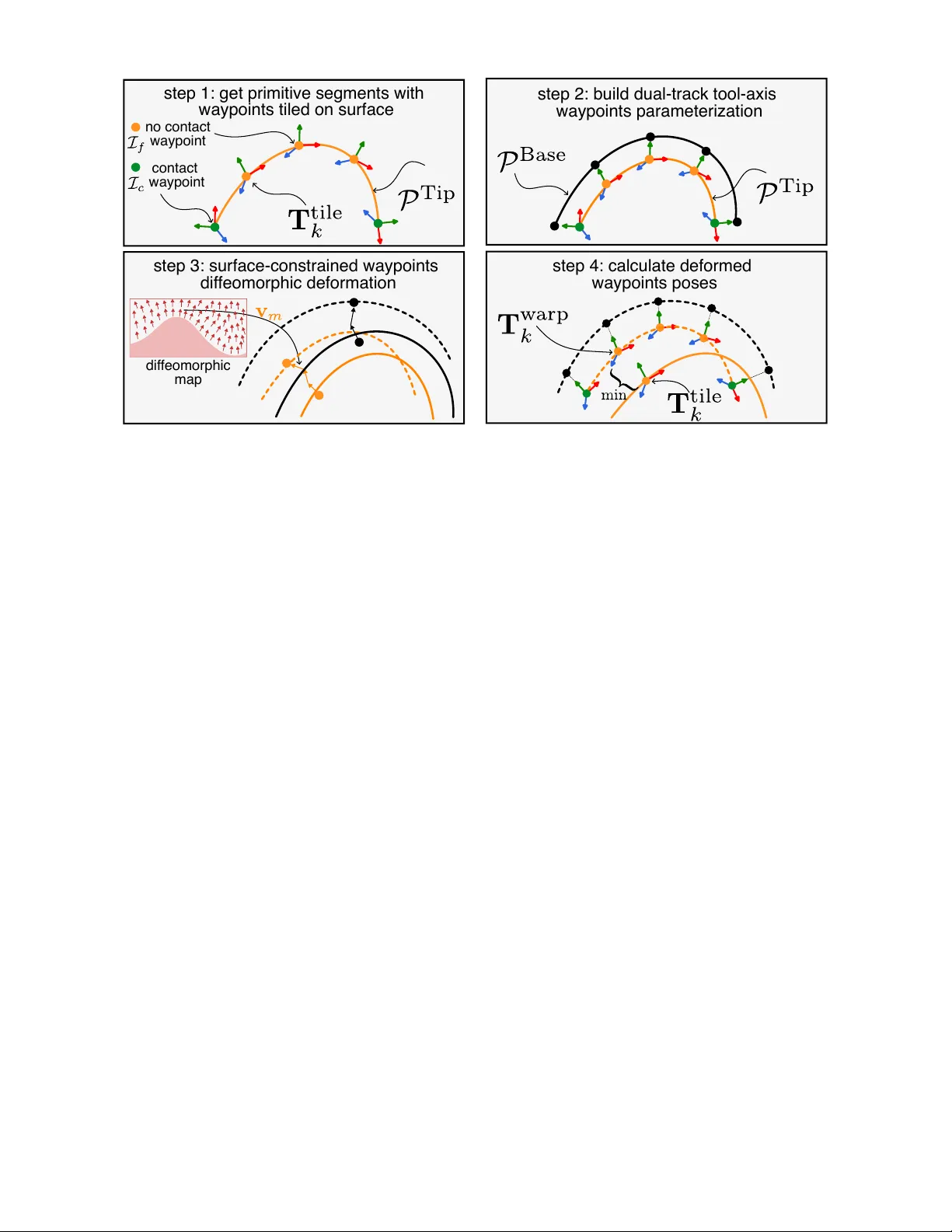
- **Step 1: Primitive Extraction & Tiling**
원시 궤적에서 하나의 주기를 추출하고, 표면 가이드 곡선의 아크 길이에 따라 동일 간격으로 타일링한다. 이때 각 타일 중심의 접선 방향을 이용해 초기 포즈를 정렬한다. 타일링 결과는 접촉 웨이포인트(Ic)와 비접촉 웨이포인트(If)로 구분된다.
- **Step 2: Dual‑Track Tool‑Axis Parameterization**
팁 트랙 P_Tip (툴 팁 위치)과 베이스 트랙 P_Base (툴 베이스 위치)를 동시에 유지한다. 두 트랙 사이의 벡터는 툴 축 방향을 정의하며, 이를 통해 기하학적 일관성을 확보한다.
- **Step 3: Surface‑Constrained Diffeomorphic Deformation**
표면 법선을 이용한 정상 방향 보정 필드 v_m(p)를 정의하고, 이를 단계적으로 적용해 디포모픽 변형 Φ = ϕ_1∘…∘ϕ_m 을 만든다. 비대칭 보정 λ_Tip, λ_Base 를 도입해 팁은 강하게 표면에 맞추고, 베이스는 부드럽게 조정한다. Ic에 해당하는 샘플은 고정(anchor)시켜 중요한 접촉 지점을 보존한다.
- **Step 4: Pose Construction**
변형된 팁 트랙을 위치 p_warp 로 사용하고, 변형된 베이스와 팁 사이의 벡터를 정규화해 툴 축을 얻는다. 축 방향만으로는 SO(3) 요소가 완전히 결정되지 않으므로, 최소 변화 원칙(minimum‑change completion)을 적용해 기존 타일 포즈와 가장 가까운 회전을 선택한다. 이렇게 얻어진 T_warp = { (R_warp_k, p_warp_k) } 은 표면에 정확히 맞춰진 주기 궤적이다.
3. 온라인 접촉 인식 투영 (E)
- 실행 중에는 FSR(Force‑Sensing Resistor) 센서로부터 접촉 힘 F_k 를 측정한다. 힘이 부족하면 중력 방향 ˆg 로 내려가고, 과도하면 위로 이동하도록 위치 보정을 수행한다.
- 동시에 원뿔형 자세 안전 제약 C = { R | ∠(R_ec, R_warp_ec) ≤ θ } 를 적용한다. 여기서 e_c 는 툴 프레임의 접촉 축이며, θ 는 허용 각도 반각이다. 이 제약은 실행 중 자세가 기준 자세에서 크게 벗어나지 않도록 보장한다.
- 최종 실행 포즈 T_proj_k = E(T_warp_k, F_k, ˆg) 은 위 두 보정을 결합한 결과이며, 반복 주기 동안 편차가 누적되지 않도록 설계되었다.
4. 실험 및 결과
- **시뮬레이션**: 구면, 사인파, 타원형 등 4가지 분석적 표면에 대해 오프라인 워핑 후 온라인 투영을 적용. 직접 타일링 방식과 비교해 위치 오차 평균 45% 감소, 자세 급변 횟수 70% 감소를 기록.
- **실제 로봇**: UR5 로봇에 FSR 센서를 부착하고, 실제 사인파형 금속 표면 위에서 반복적인 연마 작업 수행. 워핑+투영 방식은 접촉 유지율 96% (직접 타일링 78%)를 달성했으며, 작업 중 발생한 드리프트는 0.2 mm 이하로 억제되었다.
- **성능 분석**: 비대칭 디포모픽 변형이 표면 적합성을 크게 향상시키며, 온라인 원뿔형 제약이 자세 안전성을 보장한다는 점을 정량적으로 입증하였다.
5. 논의 및 한계
- 제안된 프레임워크는 표면 재학습 없이 기존 프리미티브를 재사용할 수 있어 산업 현장 적용성이 높다. 그러나 현재는 표면이 매끄럽고 연속적인 경우에 최적화되어 있으며, 급격한 불연속이나 거친 텍스처가 있는 경우 추가적인 로컬 보정이 필요할 수 있다.
- FSR 기반 힘 피드백은 저비용이지만, 고정밀 접촉 유지가 요구되는 미세 가공에서는 더 정밀한 힘/토크 센서와 결합하는 것이 바람직하다.
- 향후 연구에서는 학습 기반 변형 매핑을 도입해 비선형 복잡 표면에 대한 일반화 성능을 높이고, 다중 로봇 협업 시 워핑 결과를 공유하는 메커니즘을 탐구하고자 한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기