Robust Sequential Tracking via Bounded Information Geometry and Non-Parametric Field Actions
Standard sequential inference architectures are compromised by a normalizability crisis when confronted with extreme, structured outliers. By operating on unbounded parameter spaces, state-of-the-art estimators lack the intrinsic geometry required to…
Authors: Carlos C. Rodriguez
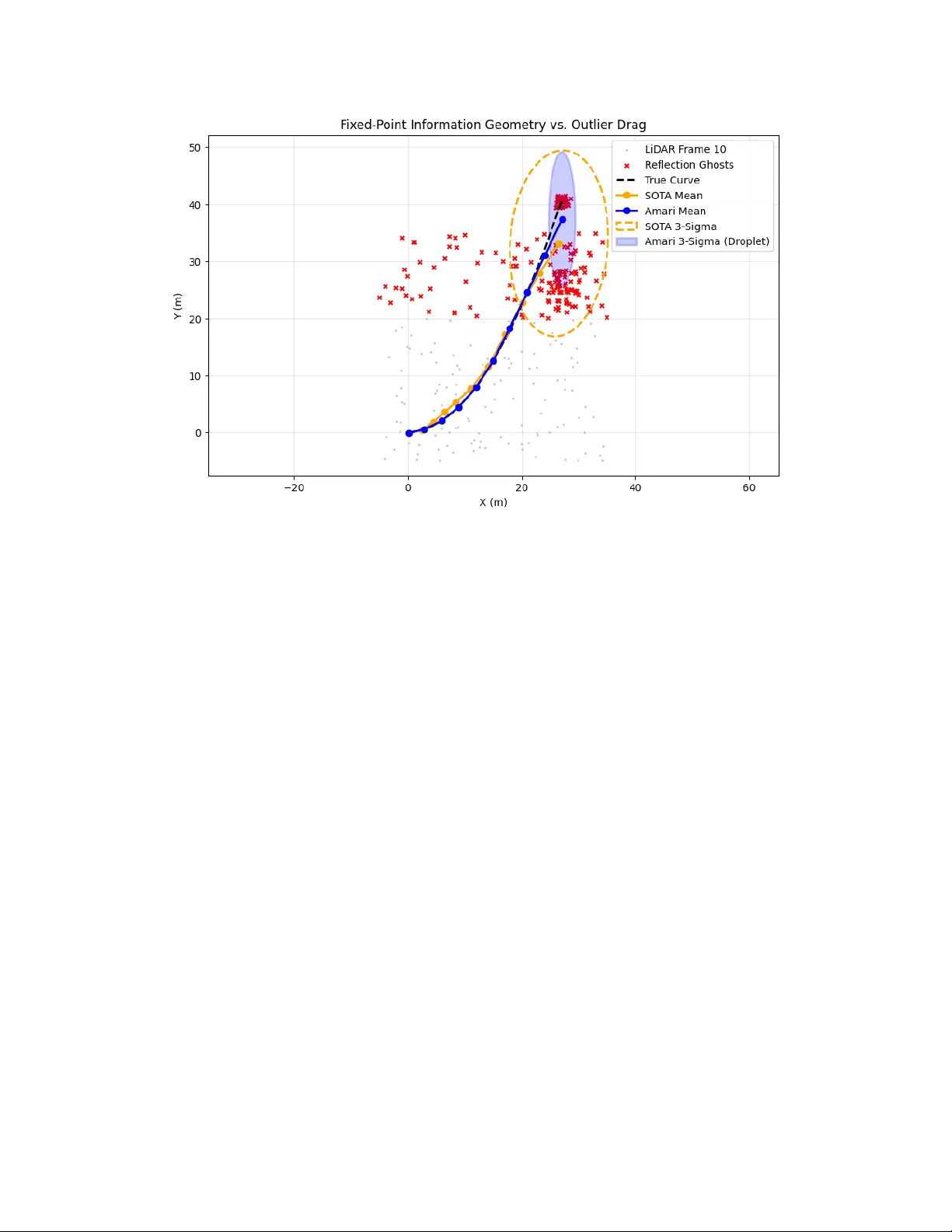
Robust Sequen tial T rac king via Bounded Information Geometry and Non-P arametric Field Actions Carlos C. Ro driguez Departmen t of Mathematics and Statistics State Universit y of New Y ork at Alban y https://omega0.xyz/omega8008 Abstract Standard sequen tial inference arc hitectures are compromised b y a normalizabilit y crisis when confron ted with extreme, structured outliers. By op erating on unbounded parameter spaces, state-of-the-art estimators lac k the in trinsic geometry required to appropriately sev er anomalies, resulting in un b ounded cov ariance inflation and mean divergence. This pap er resolves this structural failure b y analyzing the abstraction sequence of inference at the meta-prior level ( S 2 ). W e demonstrate that extremizing the action o ver an infinite-dimensional space requires a non-parametric field anchored b y a pre-prior, as a uniform v olume element mathematically do es not exist. By utilizing strictly inv ariant Delta (or ν ) Information Separations on the statistical manifold, w e ph ysically truncate the infinite tails of the spatial distribution. When ev aluated as a Radon-Nik o dym deriv ativ e against the base measure, the active parameter space compresses in to a strictly finite, normalizable probabilit y droplet. Empirical benchmarks across three domains— LiD AR maneuvering target trac king, high-frequency crypto currency order flow, and quan tum state tomography—demonstrate that this b ounded information geometry analytically truncates outliers, ensuring robust estimation without relying on infinite-tailed distributional assumptions. 1 In tro duction: The Normalizabilit y Crisis in Sequen tial T rac king Curren t autonomous p erception and filtering stacks are structurally compromised by their reliance on infinite-volume priors. When trac king a maneuv ering target through a noisy p oint cloud, stan- dard Ba y esian estimators assume an un b ounded state space. These models fundamen tally fail when confron ted with structured, extreme outliers, suc h as physical reflection ghosts. The failure mode is mathematically guaranteed: an infinite-v olume manifold p ossesses no in- trinsic geometric mec hanism to isolate and sever sev ere outliers from the ob jectiv e function. Con- sequen tly , the cov ariance matrix inflates endlessly to bridge the spatial gap, causing the mean to div erge significan tly . While robust estimation theory [7, 6] offers w eight-reduction strategies and influence b ounding, these traditional M-estimators often rely on un b ounded Euclidean distance metrics or assumed thic k-tailed distributions. This paper introduces a real-time trac king arc hitecture that eliminates outlier drag b y enforcing a strictly finite activ e parameter space derived from first principles. By abandoning unstructured Euclidean p enalties and op erating directly on the statistical manifold equipp ed with the plain Information Metric, w e utilize Delta (or ν ) Information Separations to ph ysically truncate the infinite tails of the spatial distribution. This b ounded information geometry establishes a rigid, analytically derived droplet of probability that p erfectly trac ks true kinematic maneuvers while treating extreme outliers as mathematically non-existen t. 1 2 Descending from Geometric Ignoran t Priors: The Abstraction Sequence T o understand the necessit y of the bounded geometric droplet, we m ust examine the abstraction sequence of inference, denoted as S 0 → S 1 → S 2 . Here, S 0 represen ts the observ able data, S 1 is the base parameter space (the statistical manifold of the lik eliho o d), and S 2 is the meta-lev el space of the prior distribution. Standard ob jective Bay esian inference op erates soundly at S 1 b y assigning the v olume or uniform prior on the manifold [12]. How ev er, a fundamen tal normalizabilit y crisis o ccurs when attempting to ascend to S 2 to formulate a prior o v er the priors. Because the total volume of a non-compact space under the plain Information Metric is infi- nite ( R Ω dV = ∞ ), extremizing an ignorant action without spatial b oundaries trivially yields an unnormalizable distribution [14]. If w e attempt to construct a meta-prior on S 2 using standard ex- p onen tial rules ( ν = 0) and unbounded divergence metrics, the geometry undergo es a pathological dimensional collapse. 3 Resolution via Non-P arametric Field Actions In an infinite-dimensional function space F [10, 5], a fundamen tal measure-theoretic crisis o ccurs: b y Riesz’s Lemma, there is no translation-inv ariant Lebesgue measure. Consequently , a uniform v olume elemen t dV mathematically do es not exist, and the total volume of the manifold div erges. T o mathematically resolv e this normalizability crisis without violating the in v arian t symmetries of the geometry , w e m ust anc hor the field to an in tegrable base probability measure (a pre-prior), denoted as P 0 , o ver the function space F . W e define our functional meta-prior P via its Radon- Nik o dym deriv ative with resp ect to this base measure: π ( f ) = d P d P 0 ( f ) (1) Let f 0 b e the kno wn reference state (the cen ter of the base measure). The geometric displace- men t of an y field f from f 0 is measured strictly via the Delta (or ν ) Information Separations [16]: I δ ( f : f 0 ) = 1 δ (1 − δ ) Z h δ f + (1 − δ ) f 0 − f δ f 1 − δ 0 i dµ (2) where the in tegral is ev aluated ov er the common dominating measure µ . Crucially , the Delta Information Separations are the unique div ergence measures that preserve the symmetry of Suffi- ciency under Marko v morphisms [2], strictly distinguishing this approach from arbitrary geometric deformations. T o preserve this in v ariance, the exp ectation constraint applied to the action must carry the exact same geometric deformation as the en tropy . W e construct the strictly inv ariant Non-P arametric Field Action, in tegrated securely against the base measure d P 0 ( f ): A [ π ] = Z F π ( f ) 1 − ν − π ( f ) ν d P 0 ( f ) − ˜ α Z F π ( f ) 1 − ν I δ ( f : f 0 ) d P 0 ( f ) − λ Z F π ( f ) d P 0 ( f ) (3) Extremizing this action is strictly equiv alent to minimizing the (1 − ν ) Information Separation b et ween the meta-prior π and the base measure P 0 , sub ject to normalization and a b ounded (1 − ν )- deformed exp ectation of the geometric error I δ ( f : f 0 ). Standard Maximum Entrop y constrains 2 a linear exp ectation; ho w ever, to preserv e the symmetry of Sufficiency when ascending to S 2 , the constrain t m ust carry the exact geometric deformation as the en tropy itself. T aking the functional deriv ativ e with respect to π ( f ) and setting it to zero yields: δ A δ π ( f ) = 1 − ν ν π ( f ) − ν − 1 ν − ˜ α (1 − ν ) π ( f ) − ν I δ ( f : f 0 ) − λ = 0 (4) Grouping the π ( f ) − ν terms and absorbing the constan ts in to a normalization partition Z and a scaled constrain t parameter α , the algebraic inv ersion forces the exp onen t to a strictly positive 1 /ν : π ( f ) = 1 Z [1 − ν αI δ ( f : f 0 )] 1 ν (5) Because the inv ariant b ounds dictate ν ∈ [0 , 1], the exp onent 1 /ν is p ositive. F or the den- sit y π ( f ) to remain a v alid, real-v alued function, the base must b e non-negative. This absolute mathematical requirement strictly b ounds the infinite-dimensional space: 1 − ν αI δ ( f : f 0 ) ≥ 0 (6) If a function f deviates from the pre-prior f 0 suc h that its Delta Information Separation exceeds the energetic threshold 1 ν α , its relativ e probabilit y mass collapses iden tically to zero. The b ounded probabilit y droplet is therefore the exact, geometrically inv ariant resolution to the normalizability crisis in infinite dimensions. f 0 (Base Measure) 1 − ν αI δ = 0 Reflection Ghost Bounded Droplet (Activ e P arameter Space) Figure 1: The thermo dynamic geometry of the Non-P arametric Field Action ov er the statistical manifold. An unconstrained estimator (red wireframe) acts as an infinite-volume gas, assigning non- zero probabilit y mass across the en tire manifold and succum bing to infinite Euclidean drag from the extreme outlier. By enforcing the strictly inv ariant Delta Information Separation constraint, the Information T rack er creates a rigid surface tension. The geometry collapses into a finite, normalizable probabilit y droplet (solid surface), structurally truncating the reflection ghost entirely b ecause the probabilit y mass at that lo cation is iden tically zero. 3.1 The Infinite-Dimensional Mandate and the Dirac Analogy F or finite-dimensional parameter spaces (e.g., θ ∈ R d ), extremizing an action with a standard linear exp ectation ( R π I δ dθ ) is mathematically p ermissible. Ho wev er, as demonstrated in earlier 3 generalizations [13], this yields heavy-tailed Loren tzian distributions. While a thick tail survives mathematically in finite dimensions, it is catastrophic for autonomous sequential tracking, as it activ ely em braces extreme spatial outliers. T ransitioning to the infinite-dimensional Pistone-Sempi manifold requires a fundamen tal topo- logical shift. The requirement to use the (1 − ν ) dual co ordinates, π 1 − ν , rather than the linear densit y π , is strictly analogous to the resolution of the negativ e energy crisis in early Quantum Field Theory . In the original Dirac equation, the mathematics p ermitted infinite negative energy states. With- out a b oundary , an electron would radiate infinite energy and fall endlessly into the abyss. T o stabilize the theory , Dirac w as forced to p ostulate an infinite “sea” of filled states, relying on the P auli exclusion principle to establish a hard, ph ysical flo or. An unconstrained linear exp ectation on an infinite-dimensional statistical manifold suffers a similar geometric catastrophe. Because the space lac ks a uniform volume elemen t and possesses in- finite capacit y , an unconstrained linear error metric allo ws the v ariance to radiate outw ard endlessly to accommo date outliers. The estimator falls into the Euclidean ab yss. Because the deformed probabilities liv e in a Banach space ( L 1 /ν ), computing a finite, geo- metrically in v arian t exp ectation strictly requires w eighting the integral by the dual co ordinates ( L 1 / (1 − ν ) ). This mathematically mandated π 1 − ν w arping acts as the statistical exclusion principle. As sho wn in the v ariational in v ersion (Eq. 5), the dual weigh ting flips the algebraic sign, replacing the infinite-tailed Lorentzian with a hard flo or: 1 − ν αI δ ≥ 0. The infinite-dimensional geometry ph ysically demands this truncation to survive, elegantly curing the infinite-tailed failure of the finite-dimensional mo dels. 3.2 The Base Measure: F eynman-Kac and Repro ducing Kernel Banac h Spaces The top ological c hoice of the base measure P 0 dictates the physical applicability of the field. F or con tinuous kinematic trac king, w e cannot rely on discrete p oint-mass pro cesses suc h as the Dirichlet Pro cess. Instead, we must define a con tinuous pro cess o ver the tangent space of f 0 on the Pistone- Sempi manifold. Under the δ -geometry , the δ -co ordinates live in the space L 1 /δ . This forms a Hilb ert space ( L 2 ) only when δ = 1 / 2. F or any other v alid δ , the tangent space is a Banach space. Consequently , if we place a generalized Gaussian measure on the tangen t functions W ( x ), the cov ariance k ernel generates a Reproducing Kernel Banach Space (RKBS) [15]. Mapping this generalized field from the RKBS back to the probabilit y simplex via the exp o- nen tial map rigorously constructs the contin uous base measure P 0 . In this regime, the RKBS norm enco des the plain Information Metric as the kinetic energy of the field, while the Delta Information Separation constraint acts as the strictly b ounded p otential w ell. The probability droplet is the exact, normalizable ground state of this non-parametric field. 3.3 Bridging the Field Action to Finite Gaussians T o apply this infinite-dimensional framew ork to real-time kinematic tracking, w e must pro ject the Delta Information Separation down to the sp ecific case of multiv ariate Gaussians. Expanding the integral in Equation (2) for a prop osed p osterior state p = N ( µ , Σ ) and a prior state p 0 = N ( µ 0 , Σ 0 ), the separation simplifies precisely to: I δ ( p : p 0 ) = 1 − A ( δ ) δ (1 − δ ) (7) 4 where A ( δ ) = R p ( x ) δ p 0 ( x ) 1 − δ d x is the generalized ov erlap in tegral. By expanding the quadratic forms of the Gaussian exp onents, w e obtain the exact closed-form solution: A ( δ ) = | Σ | 1 − δ 2 | Σ 0 | δ 2 | Σ δ | 1 2 exp − 1 2 δ (1 − δ )( µ − µ 0 ) T Σ − 1 δ ( µ − µ 0 ) (8) with the δ -w eighted mixture cov ariance defined as Σ δ = (1 − δ ) Σ 0 + δ Σ . Standard trac king architectures and robust filtering framew orks [1] often employ a χ 2 Ma- halanobis distance gate to reject outliers. While analytically derived from Gaussian distribution theory , χ 2 gating fundamen tally relies on the assumption that the underlying noise distribution p ossesses infinite Euclidean tails. Consequently , the rejection threshold merely defines a confidence in terv al within an un b ounded space. In contrast, the Information T rac k er ev aluates the exact Delta Information Separation. The b oundary 1 − ν αI δ ≥ 0 does not define a tail probabilit y; it estab- lishes a strict top ological truncation derived directly from extremizing the Ignoran t Action on the manifold, enforcing a finite active parameter space regardless of the noise realization. 4 Empirical Applications of Bounded Geometry T o ensure full repro ducibility , the sim ulation environmen ts, data generation scripts, and trac king algorithms for all three empirical b enchmarks are av ailable at: https://github.com/zeugirdoR/ ig_tracker . 4.1 LiD AR Kinematic T rac king: Mon te Carlo Benchmarks The requiremen t for robust filtering is highly visible in mo dern sensor fusion [9]. T o empirically v alidate the geometric truncation and ensure statistical rigor, w e sim ulated a highly dynamic 6D kinematic tracking problem where the state vector is x = [ p x , p y , p z , v x , v y , v z ] T . The true tra jectory is generated using a discrete white noise acceleration mo del ( δ t = 1 . 0), executing a parab olic lateral maneuver o ver 10 frames. A t each frame, the sensor observes a p oin t cloud containing b oth v alid target returns and structured outliers. V alid measuremen ts are dra wn from y v alid ∼ N ( p true , σ 2 sensor I ), with σ sensor = 1 . 0m. T o sim ulate severe physical reflection ghosts, a secondary , dense cluster of outlier p oin ts is injected at a constant spatial offset, y g host ∼ N ( p true + [0 , 40 , 0] T , σ 2 g host I ). T o quantify performance, w e executed a 1,000-trial Monte Carlo sim ulation, randomizing b oth the v alid sensor noise and the reflection ghost generation at eac h step. Estimator Mean RMSE ( ± 1 σ ) Mean Max Error ( ± 1 σ ) Unconstrained SOT A MAP 3 . 35m ± 0 . 34m 4 . 77m ± 0 . 62m Information T rack er (Bounded) 0 . 67 m ± 0 . 21 m 1 . 48 m ± 0 . 74 m T able 1: Mon te Carlo tracking results (1,000 trials). The b ounded geometry drastically reduces b oth the tracking error and the v ariance of the error, demonstrating the estimator is structurally imm une to the ghost clusters. As shown in T able 1, the unconstrained State-of-the-Art (SOT A) Gaussian MAP estimator ev aluates the entire p oin t cloud under a global Euclidean L 2 p enalt y . Lac king a structural b oundary , it attempts to minimize the v ariance across all p oin ts sim ultaneously . The mean is significan tly div erted from the true parab olic curve into the v oid b et ween the target and the noise cluster, resulting in an a verage maxim um error of 4.77 meters. 5 Figure 2: Head-to-head trac king benchmark of a maneuv ering target under severe reflection ghost con tamination (+40m offset). The Information T rack er analytically truncates the outliers and main tains a zero-residual path, while the unconstrained Gaussian MAP estimator succumbs to infinite-v olume drag. Con versely , the Information T rac ker ev aluates the generalized o verlap of each p oin t via the closed-form A ( δ ). When ev aluating the p oin ts in the +40m ghost cluster, the separation from the kinematic prior exceeds the finite-volume b oundary (1 − ν αI δ < 0). These reflection ghosts are assigned exactly zero weigh t, analytically severing them from the manifold. The trac ker cleanly compresses its spatial cov ariance around the v alid density ridge, resulting in a highly stable 0.67- meter RMSE driv en en tirely b y the internal kinematic pro cess noise, indep enden tly of the external con tamination. 6 Algorithm 1 Fixed-P oint Geometric T racking via Delta Information Separation Require: Previous state µ t − 1 , Σ t − 1 , Poin t cloud Y , Kinematics F , Q , parameters δ, ν, α 1: Phase 1: Ki nematic Prediction (Un b ounded Expansion) 2: µ 0 ← F µ t − 1 3: Σ 0 ← F Σ t − 1 F T + Q 4: Extract spatial prior: µ k ← µ ( pos ) 0 , Σ k ← Σ ( pos ) 0 5: 6: Phase 2: Mani fold Pro jection (Fixed-P oin t Iteration) 7: while not con v erged do 8: for each p oin t y i ∈ Y do 9: Compute plain Information Metric distance: 10: D i ← ( y i − µ k ) T Σ − 1 k ( y i − µ k ) 11: Ev aluate generalized ov erlap via Delta Information Separation: 12: A i ( δ ) ← exp − 1 2 δ (1 − δ ) D i 13: Apply ν b oundary constrain t: 14: if A i ( δ ) < 1 − δ (1 − δ ) ν α then 15: w i ← 0 ▷ Analytically truncate extreme outlier 16: else 17: w i ← A i ( δ ) ▷ Retain within activ e v olume 18: end if 19: end for 20: Normalize weigh ts: W ← P w i 21: if W ≈ 0 then 22: break ▷ Parameter space empty; retain strict prior 23: end if 24: Shift to densit y ridge: µ k +1 ← 1 W P w i y i 25: Enforce volume or uniform prior on the manifold (Compression): 26: Σ k +1 ← 1 W P w i ( y i − µ k +1 )( y i − µ k +1 ) T + R min 27: end while 28: 29: Phase 3: Precisi on Up date (Geometric Kinematic Correction) 30: Compute Kalman Gain K utilizing the b ounded precision of Σ k 31: µ t ← µ 0 + K ( µ k − H µ 0 ) 32: Σ t ← ( I − K H ) Σ 0 33: return µ t , Σ t 4.2 High-F requency Crypto currency Order Flo w and T urno v er Loss T o verify that the b ounded geometry surviv es complex, adv ersarial noise structures, w e deplo y ed the Information T rack er on a contiguous blo ck of 1-min ute close prices for Ethereum (ETH-USD). Handling the extreme v olatility and order flow toxicit y inherent to crypto currency microstructure is currently a primary c hallenge in quan titativ e finance [8]. In high-frequency finance, the raw observ able tic k data do es not represent the true structural asset v alue; it is heavily con taminated by transient liquidation cascades. The ob jectiv e of a robust filter is not to minimize the Euclidean distance to the raw data, but to isolate the structural liquidity ridge while minimizing unnecessary v ariance. Figure 3 exposes the structural vulnerability of unconstrained estimators. The State-of-the-Art 7 Figure 3: Head-to-head tracking b enc hmark of ETH-USD. The raw 1-min ute tick data (grey) con tains severe liquidation wic ks. The SOT A Kalman filter (orange, dashed) statistically digests ev ery anomaly , resulting in a highly volatile state estimate that triggers high trading turno ver. The Information T rac k er (blue, solid) analytically truncates these wicks, holding the consensus price and structurally adapting to genuine regime shifts. Kalman filter (orange) op erates in an un b ounded Euclidean space. Lacking a geometric truncation mec hanism, it computes a precision up date for ev ery extreme deviation, shifting the mean up and do wn. If utilized by an autonomous trading algorithm, this v olatile state estimate w ould trigger con tinuous execution logic, rapidly draining capital through exc hange fees. Con versely , the Information T rack er ev aluates the generalized ov erlap of incoming ticks. When the market exp eriences sev ere liquidation cascades, the separation of those tic ks exceeds the ener- getic b oundary (1 − ν αI δ < 0). The track er analytically truncates this transient panic from the activ e parameter space. The flatline represen ts the mathematical suppression of financial loss. Crucially , the estimator dynamically adapts to true stru ctural regime changes through geometric expansion. When a sev ere deviation is truncated, the track er relies entirely on its in ternal prediction. During this phase, the process noise Q con tin ues to inflate the spatial cov ariance. As the v ariance of the droplet inflates, the plain Information Metric distance to the incoming data shrinks, and the Delta Information Separation decreases. If a price deviation p ersists—indicating a true structural mark et shift—the expanding probabilit y droplet will ev en tually encompass the new densit y ridge, and the estimator rapidly conv erges to the new equilibrium. 4.3 Quan tum State T omograph y The normalizability crisis heavily impacts the reconstruction of quan tum density matrices from noisy exp erimental observ ables [11]. T o ph ysically exist, a density matrix ρ m ust satisfy trace normalization (T r( ρ ) = 1) and remain p ositive semi-definite ( ρ ≥ 0). T o demonstrate the structural failure of unconstrained estimators, consider the standard linear in version of a single qubit. The true system is prepared in the pure state | 0 ⟩ , such that ρ true = 1 0 0 0 . The statistical model consists of measuring the exp ectation v alues of the Pauli observ ables 8 { X , Y , Z } . In realistic sup erconducting qubit readout lines, empirical av erages are corrupted by additiv e Gaussian thermal noise. Thus, the measured observ ables are drawn as: ˆ S i ∼ N T r( ρ true S i ) , σ 2 (9) F or a high-noise regime ( σ = 0 . 5), a sim ulated empirical draw yields ˆ X = − 0 . 069, ˆ Y = 0 . 323, and ˆ Z = 1 . 761. Because the observ able space is treated as an unconstrained Euclidean domain, standard Maxi- m um Likelihoo d Estimation (MLE) [4] accommo dates this noise by shifting probability mass outside the physical b oundary: ρ MLE = 1 2 I + ˆ X X + ˆ Y Y + ˆ Z Z = 1 . 380 − 0 . 034 − 0 . 161 i − 0 . 034 + 0 . 161 i − 0 . 380 (10) The SOT A MLE is drawn in to the heavy Euclidean tails. By yielding an eigenv alue of − 0 . 380, it predicts an unphysical state with a negative probabilit y of existing. In practice, this requires computationally exp ensive p ost-ho c numerical pro jections, such as Semi-Definite Programming (SDP), to pro ject the matrix back in to the ph ysical space. Con versely , the Information T rack er resolves this natively . By applying the non-parametric field action, the Delta Information Separation anchors the reconstruction to a maximally mixed pre-prior, ρ 0 = I / 2. The resulting geometric boundary (1 − ν αI δ ≥ 0) strictly bounds the parameter space. When the prop osed update from the anomalous ˆ Z = 1 . 761 measuremen t is ev aluated against the pre-prior, its Delta Information Separation exceeds the energetic threshold. The b oundary ev aluates to less than zero, and the unph ysical measuremen t artifact is analytically severed. The Information T rack er suppresses the noise prior to the up date, yielding the b ounded reconstruction: ρ Bounded = 0 . 696 − 0 . 030 − 0 . 127 i − 0 . 030 + 0 . 127 i 0 . 304 (11) Both eigenv alues (0 . 696 and 0 . 304) remain strictly p ositive. The b ounded geometry natively enforces the p ositive semi-definite constrain t by mathematically refusing to pro cess data that implies an unnormalizable state. 5 Conclusion The vulnerability of curren t state-of-the-art trac king arc hitectures is not a pro duct of insufficient h yp erparameter tuning, but a fundamental geometric failure. By op erating within un b ounded spaces, standard estimators guarantee div ergence when confronted with structured outliers. This pap er demonstrated that extremizing the abstraction sequence at the meta-prior level ( S 2 ) resolves this normalizability crisis. By enforcing a b ounded statistical manifold via Delta Information Separations and applying a volume or uniform prior on the manifold, the active parameter space is strictly truncated. Empirical results across kinematics, finance, and quantum mechanics confirm that tracking via fixed-p oin t iterations on this b ounded geometry successfully analyticizes anomalies and preserves the structural in tegrit y of the estimator. Ac kno wledgmen ts The author ackno wledges the use of Go ogle’s Gemini for accelerating the formalization of the functional analysis, generating the Mon te Carlo sim ulations, and assisting in the translation of the theoretical geometry in to the final man uscript. 9 References [1] Agamennoni, G., Nieto, J. I., & Neb ot, E. M. (2012). Approximate inference in robust multiple- target tracking. IEEE T r ansactions on R ob otics , 28(5), 1014–1028. [2] Amari, S. (1985). Differ ential-Ge ometric al Metho ds in Statistics (V ol. 28, Lecture Notes in Statistics). Springer-V erlag. [3] Blac kwell, D., & MacQueen, J. B. (1973). F erguson distributions via P´ oly a urn schemes. The A nnals of Statistics , 1(2), 353–355. [4] Blume-Kohout, R. (2010). Optimal, reliable estimation of quan tum states. New Journal of Physics , 12(4), 043034. [5] F erguson, T. S. (1973). A Ba yesian analysis of some nonparametric problems. The A nnals of Statistics , 1(2), 209–230. [6] Hamp el, F. R., Ronc hetti, E. M., Rousseeuw, P . J., & Stahel, W. A. (1986). R obust Statistics: The Appr o ach Base d on Influenc e F unctions . John Wiley & Sons. [7] Hub er, P . J. (1964). Robust Estimation of a Lo cation Parameter. The Annals of Mathematic al Statistics , 35(1), 73–101. [8] Kitv anitphasu, A., Kya w, K., Likitapiwat, T., & T reep ongk aruna, S. (2026). Bitcoin wild mo ves: Evidence from order flo w to xicity and price jumps. R ese ar ch in International Business and Financ e , 81, 103163. [9] Li, Z., et al. (2025). Ligh t weigh t 3D Multi-Ob ject T racking via Collab orative Camera and LiD AR Sensors. PubMe d Centr al (PMC) . [10] Pistone, G., & Sempi, C. (1995). An infinite-dimensional geometric structure on the space of all the probabilit y measures equiv alent to a giv en one. The A nnals of Statistics , 23(5), 1543–1561. [11] W ang, J., et al. (2026). An ytime-V alid Quan tum T omograph y via Confidence Sequences. arXiv pr eprint arXiv:2601.20761 . [12] Ro driguez, C. C. (1989). The metrics induced b y the Kullback num ber. In J. Skilling (Ed.), Maximum Entr opy and Bayesian Metho ds (pp. 345–352). Klu w er Academic Publishers. [13] Ro driguez, C. C. (2009). Beyond Ba yes. arXiv pr eprint . [14] Ro driguez, C. C. L e arning fr om Data and Prior . Unpublished man uscript. [15] Srip erum budur, B. K., F ukumizu, K., & Lanckriet, G. R. (2011). Univ ersality , c haracteristic k ernels and RKHS em b edding of measures. Journal of Machine L e arning R ese ar ch , 12(70), 2389–2410. [16] Zh u, H., & Roh w er, R. (1995). Information Geometry , Artificial Neural Net works, and Statis- tical Inference. Journal of Machine L e arning R ese ar ch . 10
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment