한계 없는 정보 기하학으로 강인한 순차 추적 구현
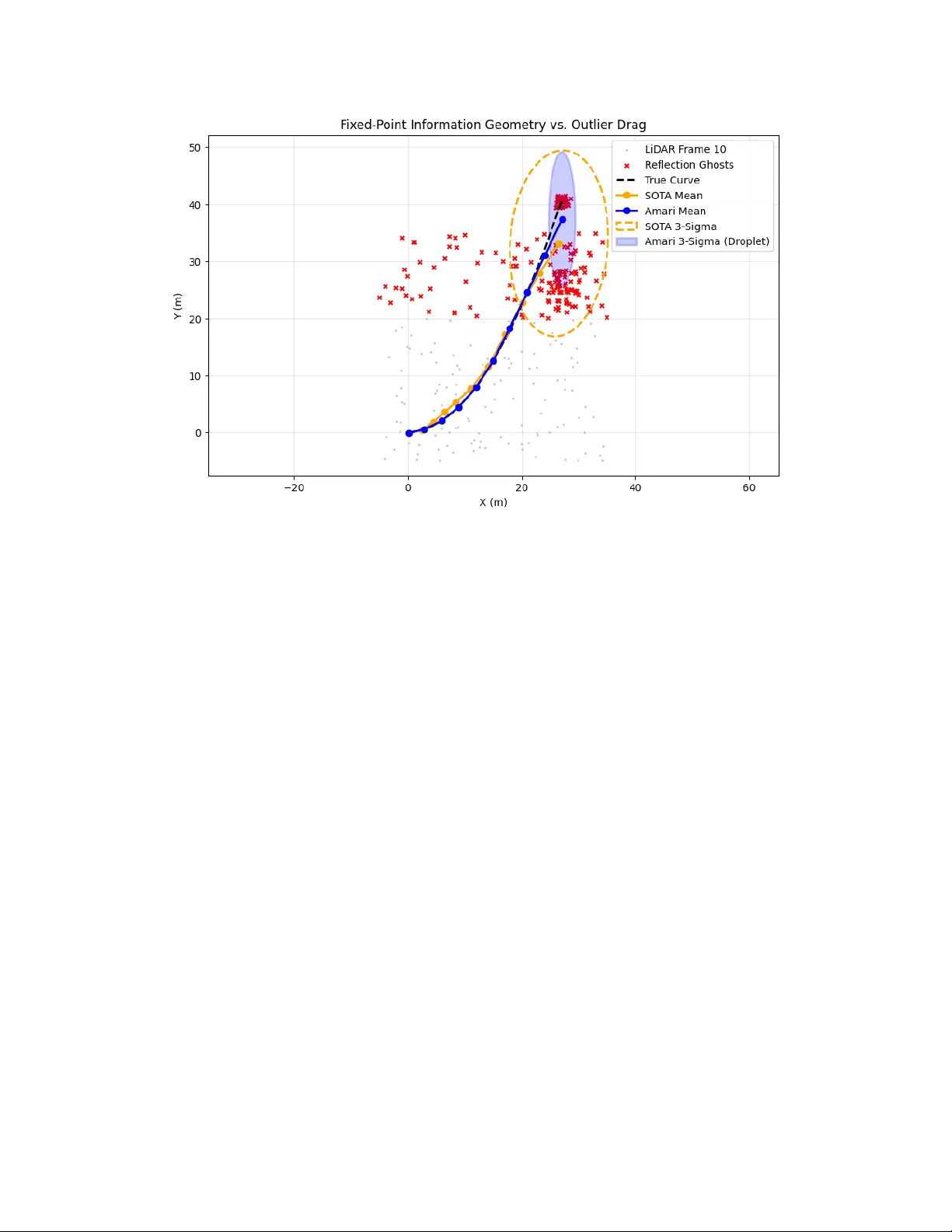
본 논문은 무한 차원 파라미터 공간에서 발생하는 정규화 불능 위기를 해결하기 위해, 사전‑사전(pre‑prior) 기반 비모수 필드와 Δ(또는 ν) 정보 분리를 도입한다. 이를 통해 확률 질량을 유한한 “드롭렛”으로 압축하고, 극단적인 구조적 이상치들을 수학적으로 영으로 만들며, LiDAR 목표 추적, 고빈도 암호화폐 주문 흐름, 양자 상태 토모그래피 등 세 분야에서 기존 방법보다 뛰어난 견고성을 입증한다.
저자: Carlos C. Rodriguez
본 논문은 순차 추적 및 필터링 시스템이 직면하는 근본적인 정규화 위기를 탐구한다. 전통적인 베이지안 추정은 파라미터 공간을 유한하거나 무한하지만 균일 부피 요소가 존재한다고 가정한다. 그러나 무한 차원 매니폴드(예: Pistone‑Sempi 매니폴드)에서는 정보 메트릭에 의해 정의된 부피가 무한하고, 균일 사전이 존재하지 않음이 수학적으로 증명된다(Riesz’s Lemma). 이로 인해 메타‑사전(S₂) 단계에서 사전 자체가 정규화되지 못해, 추정기의 공분산이 무한히 팽창하고 평균이 발산한다.
저자는 이 구조적 결함을 해결하기 위해 두 가지 핵심 개념을 도입한다. 첫 번째는 “pre‑prior” P₀ 로, 이는 연속적인 베이스 측도이며, 무한 차원 함수공간 F 위에 정의된다. 메타‑사전 P 는 P₀에 대한 Radon‑Nikodym 파생 π(f)=dP/dP₀ 로 표현된다. 이는 균일 부피 요소가 없다는 문제를 회피하고, 확률 질량을 P₀에 상대적인 형태로 정의한다는 점에서 혁신적이다.
두 번째는 Δ(또는 ν) 정보 분리 I_δ(f:f₀) 로, 이는 두 확률분포 사이의 기하학적 거리이며, Markov 변환에 대한 충분성 대칭을 보존한다. 이 정보 분리는 다음과 같이 정의된다.
I_δ(f:f₀)= (1/δ(1−δ)) ∫
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기