Decentralized Attack-Resilient CLF-Based Control of Nonlinear DC Microgrids under FDI Attacks
The growing deployment of nonlinear, converter interfaced distributed energy resources (DERs) in DC microgrids demands decentralized controllers that remain stable and resilient under a wide range of cyber-physical attacks and disturbances. Tradition…
Authors: Mohamadamin Rajabinezhad, Muratkhan Abdirash, Xiaofan Cui
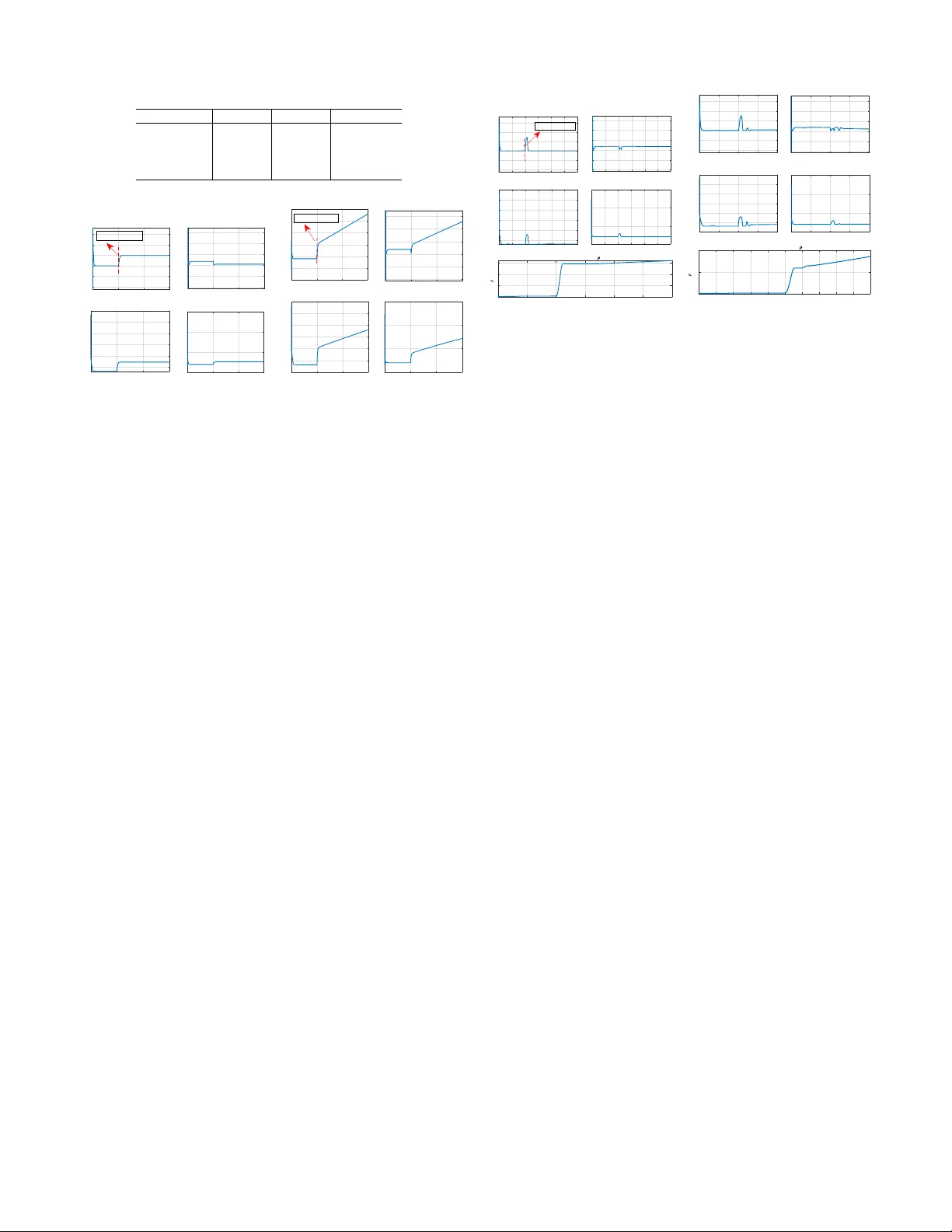
1 Decentralized Attack-Resilient CLF-Based Control of Nonlinear DC Microgrids under FDI Attacks Mohamadamin Rajabinezhad, Muratkhan Abdirash, Xiaofan Cui, Shan Zuo Abstract —The gro wing deployment of nonlinear , con verter - interfaced distributed ener gy resour ces (DERs) in DC micro- grids demands decentralized controllers that remain stable and resilient under a wide range of cyber–physical attacks and disturbances. T raditional dr oop or linearized control methods lack r esilience and scalability , especially when the system oper- ates in its nonlinear region or faces div erse false-data-injection (FDI) attacks on control inputs. In this work, we develop a Decentralized Attack-Resilien Contr ol L yapunov Function (AR- CLF) based Quadratic Program (QP) control framework for nonlinear DC micr ogrids that ensur es large-signal stability in a fully decentralized manner . Built upon the port-Hamiltonian repr esentation, the pr oposed controller dynamically compensates diverse attacks including exponentially unbounded control-input perturbations beyond the bounded-attack regime commonly as- sumed in existing methods, through an adaptive resilience term, without requiring global inf ormation. Simulations validate that the AR-CLF based QP controller achieves superior stability and resilience against unbounded attacks, pa ving the way f or scalable, attack-resilient, and physically consistent control of next-generation DC microgrids. I . I N T RO D U C T I O N DC microgrids provide an efficient, modular platform for integrating renewable generation and electronic loads, but their con verter -dominated and nonlinear nature creates sta- bility challenges [ 1 ]. Constant-po wer loads, low inertia, fast switching dynamics, and cyber–physical attacks, such as false- data-injection (FDI) and denial-of-service (DoS) attacks on control input channels can introduce unbounded perturbations that severely degrade voltage regulation and current sharing. T o improve resilience, recent work has explored adaptive, robust, and event-triggered controllers. Examples include re- silient e vent-triggered control under DoS attacks [ 2 ], and adaptiv e sampled-data security control for stochastic actuator failures [ 3 ]. Nonlinear and decentralized stabilization methods based on L yapunov optimization and port-Hamiltonian model- ing have also been dev eloped [ 4 ], [ 5 ], along with decentralized secondary control under unreliable communication. Despite these de velopments, most existing designs fundamentally rely on the bounded-disturbance assumption , limiting their effec- tiv eness against control input-channel attacks whose magni- tude increases over time. CLF provide a rigorous foundation for guaranteeing sta- bility in nonlinear systems and support both continuous and M. Rajabinezhad and S. Zuo are with the Department of Electrical and Computer Engineering, Uni versity of Connecticut, Storrs, CT , USA (email: mohamadamin.rajabinezhad@uconn.edu, shan.zuo@uconn.edu). M. Abdirash and X. Cui are with the Department of Electrical and Computer Engi- neering, University of California, Los Angeles, CA, 90095 USA (email: mabdirash@ucla.edu, cuixf@seas.ucla.edu) Accepted f or presentation at IEEE PES General Meeting 2026. © IEEE. Personal use permitted. Final version will appear in IEEE Xplore. optimization-based feedback synthesis [ 6 ]. Although Input-to- state and rob ust CLF extensions can accommodate parametric uncertainty and bounded disturbances [ 7 ], [ 8 ], they lose ef- fectiv eness under unbounded disturbances such as escalating FDI attacks. Consequently , existing CLF- and passivity-based controllers for DC microgrids guarantee stability only for bounded perturbations or local operating regions. T o overcome these limitations, this paper introduces a Decentralized AR- CLF based QP framework for nonlinear DC microgrids. The proposed method embeds resilience directly into the L yapunov deriv ativ e through an adapti ve compensation mechanism, en- suring stability under broad range of FDI attacks, including polynomially or exponentially unbounded attacks. Each con- verter employs a local AR-CLF based QP controller using only locally measurable variables, eliminating the need for centralized coordination and ensuring scalability across large- scale microgrids. The main contributions of this work are summarized as follows: • AR-CLF based QP Control: A fully decentralized AR- CLF based QP control framew ork is developed that ensures bounded con ver gence and stability under broad unbounded FDI attacks on control input channels, in- cluding exponentially gro wing attacks, without requiring centralized communication or coordination. • Nonlinear Port-Hamiltonian Modeling: The controller is formulated directly on the nonlinear averaged con verter dynamics, preserving source–bus–load coupling and en- abling global L yapunov analysis without small-signal approximations. • Large-Signal Stability with Rigorous CLF Analysis: A global energy-based CLF , deriv ed from the port– Hamiltonian structure of the nonlinear DC microgrid, provides large-signal stability guarantees for all conv erter subsystems. A rigorous L yapunov-based proof frame work certifies stability of the proposed resilient controller , guaranteeing con vergence even under unbounded FDI attacks to control input. I I . N OT I O N S A N D T O O L S F R O M C O N T RO L T H E O RY Consider the following control–affine system ˙ x = f ( x ) + g ( x ) u, (1) where its state and control input are given by x ∈ X ⊆ R n and u ∈ U ⊆ R m , respectiv ely . A pair ( u ∗ , x ∗ ) ∈ U × X is an equilibrium of system ( 1 ), if f ( x ∗ ) + g ( x ∗ ) u ∗ = 0 n . 2 DC Bus DC/DC Buck Converter 1 DC/DC Buck Converter 2 Attacker + - Controller Attacker Controller Fig. 1: Circuit schematics of a single-bus DC microgrid. Definition 1. [ 9 ] A continuously dif ferentiable function V : R n → R ≥ 0 is called a Control L yapunov Function if there exist positive constants c 1 , c 2 , c 3 > 0 such that c 1 ∥ x ∥ 2 ≤ V ( x ) ≤ c 2 ∥ x ∥ 2 , ∀ x ∈ R n , (2) inf u ∈ R m L f V ( x ) + L g V ( x ) u + c 3 V ( x ) ≤ 0 , ∀ x = 0 . (3) Her e, L f V and L g V denote the Lie derivatives of V along f and g , r espectively . Definition 2. [ 10 ] A P ort-Hamiltonian (PH) dynamical system is given by ˙ x = ( J ( x ) − R ( x )) ∂ H ( x ) + g ( x ) u + g z ( x ) z , (3a) y = g z ( x ) T ∂ H ( x ) , (3b) wher e skew-symmetric J ( x ) T = −J ( x ) is called an inter- connection matrix, and positive definite R ( x ) T = R ( x ) ≥ 0 is called a dissipation matrix. The function H is called a Hamiltonian and is defined as H ( x ) = x T Qx with positive definite Q T = Q > 0 . Let z ∈ Z ⊆ R p denote the input that enters the system modulated by matrix g z ( x ) , and y ∈ Y ⊆ R p denote the output. Definition 3. [ 5 ] Consider k inter connected PH subsystems (Def. 2 indexed by j = 1 , . . . , k ) such that all of their input and output ports become internal, i.e. P k j =1 y T j z j = 0 . Then the Global Inter connected P ort-Hamiltonian System is given by x = col ( x 1 . . . x k ) , H ( x ) = P k j =1 H j ( x j ) (4a) R ( x ) = diag ( R 1 ( x 1 ) . . . R k ( x k )) , (4b) wher e col( · ) stacks the column vector s and diag( · ) constructs a block-diagonal matrix. The global u is obtained by stacking u i , while the global J ( x ) and g ( x ) ar e both block-dia gonal with entries J j ( x ) and g j ( x ) , r espectively . Definition 4 ( [ 11 ]) . x ( t ) ∈ R n is uniformly ultimately bounded (UUB) with the ultimate bound b , if there exist constants b, c > 0 , independent of t 0 ≥ 0 , and for every a ∈ (0 , c ) , there exists t 1 = t 1 ( a, b ) ≥ 0 , independent of t 0 , such that ∥ x ( t 0 ) ∥ ≤ a ⇒ ∥ x ( t ) ∥ ≤ b, ∀ t ≥ t 0 + t 1 . I I I . P R E L I M I N A R I ES O N D C M I C RO G R I D M O D E L I N G A N D O P T I M A L S T E A DY - S TA T E A N A L Y S I S This section models a DC microgrid that operates in is- landed mode and consists of ( k − 1) decentralized energy resources (DERs), where k ≥ 1 . DERs interface with a common DC bus through DC/DC con verters. By averaging the switched-circuit dynamics of each conv erter , a reduced continuous-time model is obtained. On the source side, the combined DER plus con verter dynamics are represented by a controlled current source i s j in parallel with an output capacitor C j (see Fig. 1 ). Under current-mode operation, the fast inner loop enforces the inductor current reference, while the outer loop provides this reference v alue; hence, i s j is treated as an instantaneous control input in the av eraged model. The load components are aggregated into linear and nonlinear parts. The linear portion is modeled by a resistor R l , whereas the nonlinear portion employs a DC/DC con verter that activ ely adjusts its duty ratio to regulate voltage. This con verter is equi valently represented by a DC transformer with a turn ratio 0 ≤ d l ≤ 1 , followed by a lo w-pass filter composed of L f , C l , and a load r l , whose states are the inductor current i f and the output v oltage v l . For decentralized analysis and control, the microgrid is par- titioned into k dynamically interconnected subsystems. Each source subsystem ( j = 1 , . . . , k − 1 ) includes the con verter and its associated line. The control input is i s j , the coupling signal is the common bus v oltage v b , and the subsystem output is the line current i t j . By applying Kirchhof f ’ s voltage and current laws, the dynamics of subsystem j are described by C j ˙ v j L j ˙ i t j = − i t j v j − R j i t j − v b + 1 0 i s j , (4) where all subsystems are coupled through v b . The final subsys- tem ( j = k ) represents the bus and load con verter dynamics. Its control v ariable is the duty cycle d l , while the external interaction arises from P k − 1 j =1 i t j . Applying Kirchhof f ’ s laws yields C b ˙ v b L f ˙ i f C l ˙ v l = P k − 1 j =1 i t j − v b /R l − v l i f − v l /r l + − i f v b 0 d l . (5) The equilibrium points of the DC microgrid can be de- termined by solving the steady-state conditions of ( 4 ) and ( 5 ). Howe ver , this results in an underdetermined set of equa- tions, yielding infinitely many equilibria parameterized by the steady-state current distribution, the b us voltage v ∗ b , and the duty ratio d ∗ l of the load con verter . T o obtain a unique and optimal operating point, a strictly conv ex optimal power flo w (OPF) problem is formulated to minimize total steady-state losses in the network. These losses are primarily caused by power dissipation across the resistances R j of the transmission lines. The steady-state bus dynamics serve as the constraint, leading to the follo wing optimization problem: min { i ∗ t j } k − 1 j =1 k − 1 X j =1 ( i ∗ t j ) 2 R j , subject to k − 1 X j =1 i ∗ t j = v ∗ b R l + d ∗ l v ∗ b r l . (6) The optimal solution of the OPF problem ( 6 ) is obtained as i ∗ t j = v ∗ b R l + d ∗ l v ∗ b r l / P k − 1 p =1 R j R p , (7) where j = 1 , . . . , k . The resulting steady-state distribution in ( 7 ) ensures equitable current sharing among DERs in 3 proportion to their line conductance, compelling each source to supply suf ficient po wer to offset transmission losses. Con- sequently , all DER units contribute equally to the total load demand. The remaining steady-state quantities follow from the circuit relationships as v ∗ j = i ∗ t j R j + v ∗ b , i ∗ s j = i ∗ t j , v ∗ l = d ∗ l v ∗ b , i ∗ f = v ∗ l /r l . (8) I V . D E C E N T R A L I Z E D L A R G E - S I G N A L S T A B L E C O N T RO L L E R D E S I G N A. P ort-Hamiltonian Repr esentation of DC Micr ogrid A port-Hamiltonian (PH) system (see Definition 2 ) natu- rally admits a L yapunov function deri ved from its Hamiltonian, which guarantees large-signal stability . Moreover , PH systems can be seamlessly interconnected via their input–output ports, making them well-suited for decentralized control design. The source and load dynamics in ( 4 ) and ( 5 ) can therefore be represented as coupled PH subsystems that collecti vely form a global interconnected PH model described in Definition 3 . Consistent with Section III, the DC microgrid consists of k PH subsystems. For j = 1 , . . . , k − 1 , each subsystem represents a DER and its grid-interfacing conv erter, equi v alent to ( 4 ), and is giv en by x j = [ v j , i t j ] ⊤ , u j = i s j , z j = − v b , y j = i t j , (9a) H j ( x j ) = 1 2 C j v 2 j + L j i 2 t j , (9b) J j = 0 − 1 /L j C j 1 /L j C j 0 , g j = [1 /C j , 0] ⊤ (9c) R j = diag (0 , R j /L 2 j ) , g z j = [0 , 1 /L j ] ⊤ . (9d) The load subsystem k , corresponding to ( 5 ), captures the DC bus and load dynamics and is defined as x k = [ v b , i f , v l ] ⊤ , u k = d l , z k = − [ i t 1 , . . . , i t k − 1 ] ⊤ , (10a) H k ( x k ) = 1 2 C b v 2 b + L f i 2 f + C l v 2 l , (10b) J k = 0 0 0 0 0 − 1 /L f C l 0 1 /L f C l 0 , (10c) R k = diag 1 /R l C 2 b , 0 , 1 /r l C 2 l , (10d) g k ( x k ) = [ − i f /C l , v b /L f , 0] ⊤ , (10e) g z k = − [1 /C b , 0 , 0] ⊤ , y k = − [ v b , . . . , v b ] ⊤ ∈ R k − 1 ≤ 0 . (10f) The PH subsystems are interconnected through their ports. As P k j =1 y ⊤ j z j = P k − 1 j =1 ( − i t j v b + v b i t j ) = 0 , no external port remains, confirming that the complete microgrid forms a global interconnected PH system. B. Lar ge-Signal Stable DC Micro grid Let v ∗ j and i ∗ t j denote the desired steady-state voltage and current, respectively , obtained from ( 6 ) and ( 7 ). T o en- sure exponential con ver gence to x ∗ j , each source subsystem is shaped into a closed-loop PH structure with additional damping on the voltage term. Define the error coordinates as ˆ x j = x j − x ∗ j , ˆ u j = u j − u ∗ j , and ˆ z j = z j − z ∗ j , ˆ y j = y j − y ∗ j . Modified closed-loop matrices are then giv en by J ∗ j = 0 − 1 /L j C j 1 /L j C j 0 , (11a) R ∗ j = diag α j /C 2 j , R j /L 2 j , (11b) Here, α j > 0 introduces voltage damping, ensuring exponen- tial stability . For the load subsystem, similar shaping is applied by adding dissipation to the filter current and modifying the interconnection matrix. The closed-loop representation becomes J ∗ k = 0 d ∗ l /C b L f 0 − d ∗ l /C b L f 0 − 1 /C l L f 0 1 /C l L f 0 , (12a) R ∗ k = diag 1 /R l C 2 b , α k /L 2 f , 1 /r l C 2 l . (12b) C. Nominal Stabilizing Contr oller The nominal controller follows the Dynamic Interconnec- tion and Damping Assignment Passi vity-Based Control (IDA- PBC) framework [ 1 ]. Unlike the traditional approach, which may violate port passi vity and lose Lipschitz continuity near equilibrium, the dynamic IDA-PBC formulation preserves both. It jointly solves for the control input u j and a transient auxiliary state ˜ x j such that the error becomes ˆ x j = x j − ˜ x j − x ∗ j . The resulting nominal stabilizing control laws are ˆ u j ( ˆ x j ) = − α j ˆ v j + e − R j t/L j ˆ i t j (0) , (13) ˆ d l ( ˆ x k ) = ( − α k / ˆ i f v b , v b > 0 , 0 , v b = 0 . (14) V . D E C E N T R A L I Z E D A R - C L F BA S E D C O N T R O LL E R D E S I G N The nominal stabilizing controller presented in Section IV guarantees conv ergence under normal operating conditions b ut does not provide resilience against malicious cyber attacks on control inputs. In practical DC microgrids, FDI attacks may corrupt locally transmitted control or state information. Since individual agents typically operate using only local measure- ments and limited neighborhood information, without access to global network topology or centralized supervision, such attacks cannot be reliably detected or mitigated through global monitoring or coordination. This motiv ates the dev elopment of a fully decentralized attack-resilient controller that embeds resilience guarantees directly within an AR-CLF framew ork. A. Stability via CLF Let the global Hamiltonian H denote a candidate L ya- punov function certifying exponential stability of the desired equilibrium x ∗ for the closed-loop DC microgrid. Follo wing the same reasoning as in Section IV , let H ( ˆ x ) = 1 2 ˆ x ⊤ Q ˆ x , then it is easy to show that the global Hamiltonian is positiv e-definite and continuously differentiable, where Q = diag( C 1 , L 1 , . . . , C k − 1 , L k − 1 , C b , L f , C l ) . Under the nominal stabilizing controller , deriv ativ e of the Hamiltonian satisfies ˙ H ( ˆ x ) = P k j =1 ˙ H j ( ˆ x j ) = − ∂ H ( ˆ x ) ⊤ R ∗ ∂ H ( ˆ x ) < 0 , (15) establishing global e xponential stability of x ∗ in the absence of adversarial disturbances. Hence, H ( ˆ x ) serv es as a valid CLF for the global dynamics, satisfying L f H ( ˆ x ) + L g H ( ˆ x ) u ≤ − ˆ x ⊤ Q ˆ R ∗ Q ˆ x, (16) where ˆ R ∗ = R ∗ − Λ > 0 and Λ is a positi ve diagonal tuning matrix. 4 B. Resiliency via AR-CLF based QP While the nominal controller ensures stability in the ideal case, an adversarial FDI attack can inject an additiv e perturba- tion δ i ( t ) into each control channel, where δ i ( t ) is unkno wn, time-varying, and possibly unbounded. ˙ x i = f i ( x i ) + g i ( x i ) u i + δ i ( t ) , (17) Assumption 1. δ j ( t ) is an exponentially unbounded signal. That is, its norms gr ow at most exponentially with time . F or the con venience of mathematical stability analysis, we assume ∥ δ j ∥ ≤ γ j exp( κ j t ) , wher e γ j and κ j ar e positive constants. This exponential en velope is introduced as a conservati ve worst-case upper bound to enable rigorous L yapunov-based stability analysis, rather than as an e xact model of adversarial behavior , and it upper-bounds a broad class of realistic attack growth patterns. T o maintain boundedness under such condi- tions, the control input is obtained by solving QP with an AR-CLF constraint: min u j ≥ 0 ( u j − u nom ,j ) 2 s.t. L f j V j ( x j ) + L g j V j ( x j ) u j + ( L g j V j )( L g j V j ) ⊤ ∥ L g j V j ∥ + e − αt e ρ j ( t ) ≤ − β j V j ( x j ) . (18) where V j ( x j ) is the local CLF derived from the subsystem Hamiltonian, β j > 0 , α > 0 , q j > 0 , and ρ j ( t ) is an adaptiv e gain ev olving as ˙ ρ j ( t ) = q j ∥ L g j V j ( x j ) ∥ , ρ j (0) = ρ j 0 ≥ 0 . (19) Assumption 2. There exist constants c j > 0 and ε j > 0 such that ∥ L g j V j ( x j ) ∥ ≥ c j for all ∥ x j ∥ ≥ ε j . Remark 1. This re gularity condition ensur es that, when the state is sufficiently away from the equilibrium, the contr ol input r etains non-vanishing authority over the CLF . F or DC/DC con verters, this corr esponds to the ability of the duty ratio or curr ent r eference to inject or dissipate ener gy under nonzer o voltage or curr ent deviations. Consequently , the adaptive r esilient term in the AR–CLF–based QP r emains effective outside the neighborhood ∥ x j ∥ ≤ ε j . Mor eover , the r esulting QP is low-dimensional, locally solvable using only local mea- sur ements, independent of the network size, and compatible with secondary control time scales. Theorem 1. Consider subsystem j under FDI attacks to contr ol input channels modelled in ( 17 ) , and let V j ( x j ) be a positive-definite, radially unbounded CLF . Under Assump- tion 1 and the non-vanishing CLF gradient condition of Assumption 2 , the decentralized AR-CLF based QP contr oller ( 18 ) , equipped with the adaptive gain dynamics ( 19 ) , guar an- tees that subsystem j is UUB. In particular , the trajectories con verg e to an in variant set contained in the compact r egion ∥ x j ∥ ≤ ε j despite broad range of FDI attacks including exponentially gr owing FDI signals. Furthermore , since ( 18 ) minimizes the deviation fr om the nominal PH-based control input u nom ,j while maintaining Lyapunov decay , the contr oller pr eserves nominal performance under normal conditions and enhances r esiliency during adversarial attacks. proof : Under the attacked dynamics ( 17 ), ˙ V j = L f j V j + L g j V j ( u j + δ j ( t )) . Using the AR-CLF constraint ( 18 ) and the Cauchy–Schwarz inequality , L g j V j δ j ≤ ∥ L g j V j ∥ ∥ δ j ( t ) ∥ ≤ ∥ L g j V j ∥ γ j e κ j t , we obtain the bound ˙ V j ≤ − β j V j − ∥ L g j V j ∥ 2 ∥ L g j V j ∥ + e − αt e ρ j ( t ) + ∥ L g j V j ∥ γ j e κ j t . (20) Consider the region ∥ x j ∥ ≥ ε j . Assumption 2 giv es ∥ L g j V j ∥ ≥ c j , and since the map s 7→ s 2 / ( s + e − αt ) is increasing in s ≥ 0 , ∥ L g j V j ∥ 2 ∥ L g j V j ∥ + e − αt ≥ ¯ c j = c 2 j c j +1 . Thus, when ∥ x j ∥ ≥ ε j , ˙ V j ≤ − β j V j − ¯ c j e ρ j ( t ) + c j γ j e κ j t . (21) Next, the adapti ve law ( 19 ) satisfies ˙ ρ j ( t ) = q j ∥ L g j V j ∥ ≥ q j c j whenev er ∥ x j ∥ ≥ ε j , which implies the linear gro wth bound ρ j ( t ) ≥ ρ j ( t 0 ) + q j c j ( t − t 0 ) , over an y time interval on which ∥ x j ∥ ≥ ε j . Since q j c j > κ j by design, e ρ j ( t ) ev entually dominates e κ j t . Hence, there e xists t 1 > 0 such that ¯ c j e ρ j ( t ) ≥ c j γ j e κ j t , ∀ t ≥ t 1 and ∥ x j ∥ ≥ ε j . (22) Substituting ( 22 ) into ( 21 ) yields ˙ V j ≤ − β j V j , ∀ t ≥ t 1 , ∥ x j ∥ ≥ ε j . Thus, after a finite time t 1 , V j decreases strictly whene ver the state lies outside the compact set B ε j = { x j : ∥ x j ∥ ≤ ε j } . Inside B ε j , boundedness follows from continuity of the closed-loop dynamics. By standard L yapunov and LaSalle in variance principle, the subsystem trajectories are UUB and conv erge to an in variant set contained in B ε j . ■ V I . S I M U L A T I O N A N D V A L I DAT I O N A single-bus DC microgrid with two DER-interfacing con- verters supplying a nonlinear load is used to validate the proposed AR-CLF based QP controller . The switched-circuit model, shown in Fig. 1 , is simulated in Matlab-Simulink, and all line, filter, and con verter parameters are listed in T able I . The control objecti ve is to (i) regulate the DER terminal v oltages v j and the bus v oltage v b to their optimal steady-state values, (ii) ensure bounded con verter currents i s j and load filter current i f , and (iii) maintain closed-loop stability under a wide range of FDI attacks. The steady-state operating point used in all simulations is ( x ∗ , u ∗ ) , gi ven by v ∗ 1 = v ∗ 2 ≈ 24 . 16 V , i ∗ t 1 ≈ 8 . 75 A , i ∗ t 2 ≈ 9 . 25 A , v ∗ b = 24 V , i ∗ f = 12 A , v ∗ l = 12 V , and d ∗ = 0 . 5 . The proposed AR-CLF controller is compared ag ainst the nominal optimal controller (no resiliency) under different scenarios. 1) Case I: Nominal PH-Based Contr ol Under Bounded and P olynomial Attacks: FDI disturbances are injected at t = 10 s and applied directly to the control input channel. I. Bounded attack: A constant bias δ ( t ) = [0 . 5; 0 . 5; 0 . 5] is introduced. As seen in Fig. 2a , the nominal controller immediately develops voltage drift and current deviation once the attack begins. II. Polynomially unbounded attack: Fig. 2b sho ws that a growing perturbation δ ( t ) = 1 + 5[0 . 2 t ; 0 . 15 t ; 0 . 1 t ] quickly driv es the system unstable after t = 10 s, causing b us-voltage collapse and div erging conv erter currents. The nominal PH- based controller is reliable only under benign conditions and fails under bounded and growing FDI attacks, motiv ating attack-resilient control. 5 T ABLE I: Physical parameters of the DC microgrid used in simula- tion. Component C [mF] L [mH] R DER 1 0.49 0.09 18 . 78 mΩ DER 2 0.57 0.08 17 . 78 mΩ Filter 0.47 0.16 r l = 1 Ω Bus/Load 0.47 – R l = 2 Ω 0 10 20 30 t [s] 20 22 24 26 28 30 v b [V] Bus Voltage 0 10 20 30 t [s] 4 6 8 10 12 14 i t1 [A] Source 1 Current 0 10 20 30 t [s] 10 12 14 16 18 20 i t2 [A] Source 2 Current 0 10 20 30 t [s] 10 15 20 25 i f [A] Filter Current Attack Initiation (a) Constant attack 0 10 20 30 t [s] 15 20 25 30 35 40 45 v b [V] Bus Voltage 0 10 20 30 t [s] 4 6 8 10 12 14 i t1 [A] Source 1 Current 0 10 20 30 t [s] 8 10 12 14 16 18 20 i t2 [A] Source 2 Current 0 10 20 30 t [s] 10 15 20 25 i f [A] Filter Current Attack Initiation (b) Polynomial attack Fig. 2: Performance of the nominal CLF controller under bounded and polynomially unbounded FDI attacks. 2) Case II: Pr oposed AR-CLF based QP Contr ol Under P olynomial and Exponential Unbounded Attac ks: W e ev aluate the proposed AR-CLF based QP controller under the same at- tack injection windo w ( t = 10 s) using the following scenarios: I. Polynomially unbounded attack: With δ ( t ) = 1 + 5[0 . 2 t ; 0 . 15 t ; 0 . 1 t ] , the proposed controller maintains bounded conv erter currents and preserves voltage regulation (Fig. 3a ). Unlik e the nominal controller, which di verges under this disturbance, the adaptiv e gain ρ ( t ) grows fast enough to suppress the increasing attack magnitude, ensuring con vergence to ward an attack-inflated in variant set. II. Exponentially unbounded and stochastic attacks: W e consider heterogeneous FDI attacks of the form δ ( t ) = 0 . 15(2 +4 e 0 . 3( t − t 1 ) ) I t ≥ t 1 , 0 . 15(5 + 5 e 0 . 4( t − t 2 ) ) I t ≥ t 2 , 0 . 10(3 + 10 e 0 . 2( t − t 3 ) ) I t ≥ t 3 + δ noise ( t ) , with channel-dependent gains, growth rates, asynchronous initiation times, and δ noise ( t ) rep- resents additi ve stochastic disturbances (e.g., Gaussian noise). Under these se vere perturbations, the proposed AR-CLF based QP controller remains stable (Fig. 3b ). As the attacks escalate, the adaptiv e law autonomously amplifies the compensation pa- rameter ρ ( t ) , ensuring the adversarial terms are compensated in the CLF dissipation inequality and guaranteeing UUB of all closed-loop states. Consequently , the DC b us voltage, DER terminal voltages, and line currents remain bounded and close to their nominal steady-state values despite asynchronous, stochastic, and exponentially unbounded FDI attacks. The DC bus voltage de viation remains below 12% of nominal, and all currents stay bounded with peaks under 11% during the attack, demonstrating that the proposed controller ensures decentral- ized resilience against a broad class of realistic cyberattacks beyond bounded or synchronized models. V I I . C O N C L U S I O N This paper presents a fully decentralized AR–CLF–based QP control frame work for nonlinear DC microgrids under a broad class of FDI attacks, including polynomially and e x- ponentially unbounded disturbances. Using port–Hamiltonian 0 5 10 15 20 25 30 t [s] 20 22 24 26 28 30 v b [V] Bus Voltage 0 5 10 15 20 25 30 t [s] 4 6 8 10 12 14 i t1 [A] Source 1 Current 0 5 10 15 20 25 30 t [s] 10 12 14 16 18 20 i t2 [A] Source 2 Current 0 5 10 15 20 25 30 t [s] 10 15 20 25 i f [A] Filter Current 0 5 10 15 20 25 30 t [s] 0 2 4 6 (t) Adaptive Gain (t) Attack Initiation (a) Polynomial attack 0 5 10 15 20 t [s] 20 22 24 26 28 30 v b [V] Bus Voltage 0 5 10 15 20 t [s] 4 6 8 10 12 14 i t1 [A] Source 1 Current 0 5 10 15 20 t [s] 8 10 12 14 16 18 20 i t2 [A] Source 2 Current 0 5 10 15 20 t [s] 10 15 20 25 i f [A] Filter Current 0 2 4 6 8 10 12 14 16 18 20 t [s] 0 5 10 (t) Adaptive Gain (t) (b) Exponential attack Fig. 3: Performance of the proposed AR-CLF controller under polynomially and exponentially unbounded FDI attacks. modeling and an adaptiv e law , the proposed controller guar- antees large-signal stability from local measurements only , without global communication, centralized coordination, or e x- plicit attack detection. Rigorous L yapunov analysis establishes uniform ultimate boundedness, and simulations demonstrate that, unlike the nominal PH controller, the AR–CLF–QP pre- serves v oltage regulation, bounds currents, and autonomously compensates for escalating attacks, providing a scalable and resilient solution for adversarial next-generation DC micro- grids. R E F E R E N C E S [1] C. Y uan, J.-P . Martin, S. Pierfederici, E. V uillemin, M. Phattanasak, and Y . Huangfu, “Large signal stabilization at system le vel using port- hamiltonian system theory for modular islanded dc microgrids, ” IEEE T ransactions on Industrial Electronics , 2025. [2] G. B. Hong and S. H. Kim, “Resilient adaptive e vent-triggered control of nonlinear dc-microgrids under dos attacks: Local stabilization approach, ” IEEE T ransactions on Automation Science and Engineering , 2025. [3] Z.-P . W ang, B.-M. Chen, F .-L. Zhao, J. Qiao, H.-N. W u, T . Huang, and G. Chen, “ Adaptive e vent-triggered sampled-data fuzzy security control for nonlinear delayed dpss with dos attacks and stochastic actuator failures, ” IEEE Tr ansactions on Automation Science and Engineering , 2025. [4] F . Chang, X. Cui, M. W ang, and W . Su, “Potential-based lar ge-signal stability analysis in dc power grids with multiple constant power loads, ” IEEE Open Access Journal of P ower and Ener gy , vol. 9, pp. 16–28, 2021. [5] M. Abdirash and X. Cui, “Nonlinear optimal control of dc microgrids with safety and stability guarantees, ” in 2025 American Contr ol Con- fer ence (A CC) , 2025, pp. 772–778. [6] N. F . Barroso, R. Ushirobira, and D. Efimov , “Control lyapunov function method for rob ust stabilization of multistable af fine nonlinear systems, ” International J ournal of Robust and Nonlinear Contr ol , 2023. [7] P . Zhao, “Parameter-dependent control lyapunov functions for stabilizing nonlinear parameter-v arying systems, ” IEEE Control Systems Letter s , 2025. [8] Q. Nguyen and K. Sreenath, “Optimal robust control using control lyapunov function and barrier function-based quadratic programs, ” IEEE Confer ence on Decision and Contr ol , 2015. [9] A. D. Ames, X. Xu, J. W . Grizzle, and P . T ab uada, “Control barrier function based quadratic programs for safety critical systems, ” IEEE T ransactions on Automatic Control , vol. 62, no. 8, pp. 3861–3876, 2016. [10] R. Ortega, A. V an Der Schaft, B. Maschke, and G. Escobar , “Inter- connection and damping assignment passivity-based control of port- controlled hamiltonian systems, ” Automatica , vol. 38, no. 4, pp. 585– 596, 2002. [11] H. Khalil, Nonlinear Systems , 3rd ed. Prentice hall Upper Saddle Riv er, NJ, 2002.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment