Modeling UAV-aided Roadside Cell-Free Networks with Matérn Hard-Core Point Processes
This paper investigates a uncrewed aerial vehicles (UAV)-assisted cell-free architecture for vehicular networks in road-constrained environments. Roads are modeled using a Poisson Line Process (PLP), with multi-layer roadside access points (APs) depl…
Authors: Chenrui Qiu, Yongxu Zhu, Bo Tan
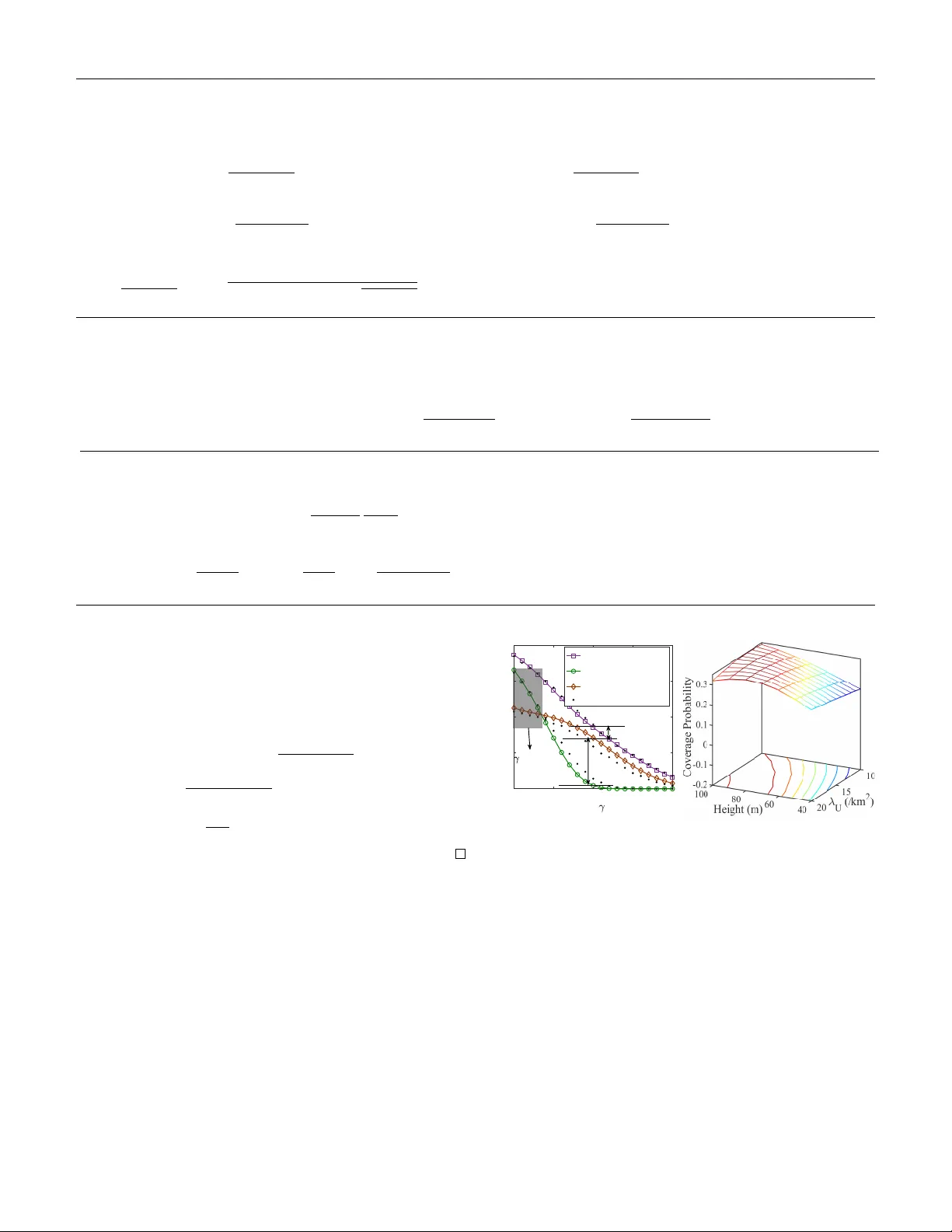
Modeling U A V -aided Roadside Cell-Free Networks with Mat ´ ern Hard-Core Point Processes Chenrui Qiu ∗ , Y ongxu Zhu † , Bo T an ‡ , George K. Karagiannidis § , T asos Dagiuklas ∗ ∗ School of Computer Science and Digital T echnologies, London South Bank Univ ersity , London, UK † School of Information Science and Engineering, Southeast Univ ersity , Nanjing, China ‡ Department of Electronic and Electrical Engineering, Univ ersity College London, London, UK § Department of Electrical and Computer Engineering, Aristotle Univ ersity of Thessaloniki, Thessaloniki, Greece { qiuc3, tdagiuklas } @lsbu.ac.uk, yongxu.zhu@seu.edu.cn, tan.bo@ucl.ac.uk, geokarag@auth.gr Abstract —This paper in vestigates a uncrewed aerial vehicles (U A V)-assisted cell-free architectur e for vehicular networks in road-constrained en vironments. Roads are modeled using a Poisson Line Process (PLP), with multi-layer roadside access points (APs) deployed via 1-D P oisson Point Process (PPP). Each user forms a localized cell-free cluster by associating with the nearest AP in each layer along its corresponding road. This forms a road-constrained cell-free architecture. T o enhance coverage, U A V act as an aerial tier , extending access from 1-D road- constrained layouts (embedded in 2-D) to 3-D. W e employ a Mat ´ ern Hard-Core (MHC) point process to model the spatial distribution of U A V base stations, ensuring a minimum safety distance between them. In order to enable tractable analysis of the aggr egate signal from multiple APs, a distance-based power control scheme is introduced. Leveraging tools from stochastic geometry , we ha ve studied the coverage probability . Furthermore, we analyze the impact of key system parameters on coverage performance, pro viding useful insights into the deployment and optimization of U A V -assisted cell-free vehicular networks. Index T erms —Uncrewed aerial vehicles, Cell-free, PLP , Mat ´ ern Hard-Core process. I . I N T RO D U C T I O N The integration of uncrewed aerial vehicles (U A V) into cell- free massiv e MIMO architectures has receiv ed considerable attention due to its potential to enhance co verage and fle xibility in next-generation wireless networks. A number of studies hav e examined the theoretical foundations of such inte gration, often employing stochastic geometry to analyze large-scale U A V distributions and their effects on system performance. F or instance, [1] proposes a stochastic geometry-based framework for ev aluating the SINR and outage performance in aerial- user-enabled cell-free networks, while [2] inv estigates cache- assisted UA V networks for emergency scenarios using Poisson Point Process (PPP) modeling. Additionally , [3] considers underlay spectrum access with U A V -assisted cell-free net- works, highlighting interference mitigation mechanisms. At the system le vel, [4] provides one of the earliest analyses of U A V -assisted cell-free netw orks with a focus on channel hard- ening and pilot contamination, and [5] explores the asymptotic behavior and optimal deployment strate gies of U A V -based cell- free architectures. Survey-oriented works such as [6] and [7] summarize recent adv ancements in U A V swarming, mobility , and cell-free system applications, especially for IIoT and smart infrastructure. Parallel to theoretical modeling, several studies hav e fo- cused on optimization and deployment strategies for enhancing cell-free UA V performance. [8] proposes joint user association and power allocation for fairness optimization in U A V -assisted cell-free networks, while [9] formulates a weighted sum power minimization problem under UA V energy constraints. Beamforming and placement optimization are studied in [10], where an intelligent reflecting surface (IRS) is mounted on U A Vs to improve spatial multiplexing. In a broader network context, [11] examines UA V -assisted satellite and terrestrial integrated cell-free systems with energy efficiency objecti ves. Mobility and association dynamics are also in vestigated in [12], which proposes UA V -centric dynamic access point as- signment for aerial–to-ground cell-free networks. Furthermore, [13] explores NOMA-based U A V -assisted systems that could complement cell-free architectures. Despite the progress in system-lev el optimization, most existing studies rely on channel or power -based association while ov erlooking traffic heterogeneity and queueing-induced latency , leading to excessiv e delay and inefficient resource uti- lization in dense networks [14]. Moreover , UA V -assisted cell- free solutions often adopt idealized assumptions, such as per- fect hardware and high-capacity fronthaul, whereas practical imperfections can substantially degrade U A V communication performance [15], calling for more realistic and deployable designs. Thus, this paper considers a hybrid architecture wherein line-distributed ground APs form a stable cell-free system, and U A V act as supplementary aerial base stations. Howe ver , most existing studies assume uniform or unstructured AP distribu- tions. In contrast, vehicular networks feature road-constrained AP layouts, which are rarely modelled. This moti v ates the need for a new framew ork that incorporates line-deployed cell-free APs. Roads are modeled via a Poisson Line Process (PLP), with APs deployed along each road using 1-D PPPs and U A V forming a 3-D aerial tier . This results in a hierarchical 1-D to 3-D access structure suited to vehicular topologies. In this work our main contributions are: (1) W e dev elop an integrated spatial model combining PLP-based roadside APs and 3-D Mat ´ ern Hard-Core (MHC)-based UA V as base stations in case of collision. (2) A road-constrained cell-free architecture is proposed, where each user forms a localized cooperation cluster by associating with the nearest AP in each layer along its corresponding road. (3) W e deriv e expressions for coverage using distance-based power control and Gamma approximations. (4) Extensi ve simulations validate the analysis and identify optimal key parameters for UA V deployment in roadside cell-free network. I I . S Y S T E M M O DE L W e consider a do wnlink cell-free v ehicular network com- prising ground APs and UA V that collaborativ ely serve vehic- ular users, as illustrated in Fig. 1. The road system is modeled by a motion-inv ariant PLP Φ l in R 2 with line density µ l , inducing a poisson point process in the representation space C with density λ l = µ l /π . Each line in Φ l corresponds to a straight road. Along each road, APs are deployed following a homogeneous 1-D PPP with K layers, each with density λ ( k ) a . APs are single-antenna and connect with the same edge cloud instance in each road. UA V act as aerial Base Stations (BSs) and are distributed in 3-D space according to a MHC process Φ U with density λ U and safety distance d . All U A V hov er at altitude H U and use single-antenna transmission. V ehicular users are independently distrib uted along roads via a 1-D PPP and equipped with single receiv e antennas. All APs and U A V transmit at powers P a and P U , respectiv ely . A typical user (UE) is located at the origin O = (0 , 0) . CPU AP AP-UE link UA V UA V - UE NLoS link UA V - UE LoS link Fig. 1. Architecture of vehicular Cell-free Network integrated with U A V base stations. T o ensure minimum spacing and mitigate U A V clustering, U A V are modeled via a T ype-II MHC point process Φ U as [16], obtained by thinning a parent PPP Φ p with intensity λ p . Each point in Φ p is assigned a uniform random mark in [0 , 1] and retained only if it has the lowest mark within a disk of radius d . The resulting intensity is λ U = 1 − exp( − λ p π d 2 ) π d 2 . Due to the spatial dependence in MHC, we employ the second-order product density ζ (2) ( v ) to characterize the prob- ability of finding two points at distance v : ζ (2) ( v ) = 0 , v < d 2 V ( v ) h 1 − e − λ p πd 2 i − 2 π d 2 [ 1 − e − λ p V ( v ) ] π d 2 V ( v )[ V ( v ) − πd 2 ] , d ≤ v ≤ 2 d λ 2 u , v > 2 d (1) where V ( v ) is the union area of two disks separated by v : V ( v ) = 2 π d 2 − 2 d 2 cos − 1 v 2 d + v q d 2 − v 2 4 . (2) A. Channel Model U A V -UE links may be either line-of-sight (LoS) or non- line-of-sight (NLoS). Giv en UA V altitude H U and horizontal distance z , the LoS probability is modeled as [17] p L ( z ) = 1 1 + a exp − b 180 π tan − 1 H U z − a , (3) where a and b are environment-dependent parameters. The NLoS probability is p NL ( z ) = 1 − p L ( z ) . W e consider a directional beamforming strategy where antenna main lobes are aligned along the road direction. The ground AP antenna pattern is sectorized, with main and side lobe gains G a and g a , respectiv ely . UA V are similarly equipped with directional antennas, characterized by G U and g U . The serving antenna always steers its main lobe toward the intended user . W e assume that U A V -UE links experience Nakagami- m fading with parameters m L and m NL for LoS and NLoS, respectiv ely . For AP-UE links, we adopt Nakagami- m fading with parameters m 21 and m 22 , corresponding to typical and non-typical lines. The respectiv e channel gains are denoted by h L , h NL , h a 0 , and h a 1 , with all m values assumed to be positiv e integers. Large-scale fading due to path loss is considered, with exponent α a ≥ 2 for AP-UE links and α v ( v ∈ { L , NL } ) for U A V -UE links under LoS and NLoS conditions. B. Association P olicy W e assume that the typical user associates with the AP or U A V providing the strongest biased recei ved power . T o enable load balancing, selection bias factors B U and B a are applied for tier -1 (UA V) and tier -2 (APs), respecti vely . The serving node r ∗ is determined as r ∗ = arg max B U P U G U r − α v 1 , B a P a G a r − α a 2 , (4) where r 1 denotes the 3-D distance between the typical UE and its nearest U A V , and r 2 = arg max r ∈ Ξ L 0 B a P a G a r − α a , and v ∈ { L , NL } denotes the LoS or NLoS condition. Since U A V are modeled as a homogeneous PPP in R 2 , the horizontal distance z between the user and its nearest U A V follo ws a Rayleigh distribution with the PDF f Z ( z ) = 2 π λ U z exp( − π λ U z 2 ) . The probability that the typical user associates with a U A V via a LoS link is given by A L = E Z [ p L ( z )] = Z ∞ 0 p L ( z ) · f Z ( z ) dz , (5) and the NLoS association probability is A NL = 1 − A L . C. SINR and Coverag e Pr obability The recei ved signal power at the typical receiv er O is decided by the transmit node. When the receiver is associated with tier-1 UA V node, the received power can be expressed by P r = P U G U h v r − α v , v ∈ { L , NL } , (6) where P U is the U A V transmit power , h v is the Nakagami- m fading gain, and α v represents the path loss exponent under LoS or NLoS conditions. If the typical receiv er is served by the closest AP of each layer on the road, the receiv ed power can be defined as P r = X k P a G a h ( k ) a 0 r − α a k , (7) where r k and h ( k ) a 0 denote the distance and fading gain asso- ciated with the k -th layer closest AP . Based on the above assumptions, the SINR recei ved at the typical recei ver can be e xpressed as γ = P r σ 2 + I 1 + I 2 , where I 1 is the interference from the tier -1 nodes, I 2 is interference from the tier -2 nodes. T o e valuate the probability that the typical receiver achiev es a rate above a tar get threshold γ 0 , we define the cov erage probability as P C ( γ ≥ γ 0 ) [18]. I I I . E V A L U A T I O N O F P E R F O R M A N C E M E T R I C S This section analyzes ke y metrics for the proposed U A V - assisted vehicular network. W e first deri ve the association probabilities under biased recei ved power association. Then, we characterize the serving distance distributions, which form the basis for SINR and cov erage analysis. A. Association Pr obability Definition 1 . The 3-D distance r 1 from the typical user to its serving U A V has the CDF and PDF as F R 1 ( r 1 ) = 1 − exp − λ U π ( r 2 1 − H U 2 ) , r 1 ≥ H U , (8) f R 1 ( r 1 ) = 2 π λ U r 1 exp − λ U π ( r 2 1 − H U 2 ) , r 1 ≥ H U . (9) Definition 2 . The 1-D distance r 2 from the user to its nearest AP along the road follows F R 2 ( r 2 ) = 1 − exp ( − 2 λ a r 2 ) , r 2 ≥ 0 , (10) f R 2 ( r 2 ) = 2 λ a exp ( − 2 λ a r 2 ) , r 2 ≥ 0 . (11) Lemma 1. W e denote that typical receiver connects to U A V (tier-1) as event E 1 , to APs (tier-2) as e vent E 2 . The pr obability of the event E 1 and E 2 defined as ( P ( E 1 ) = A L A 1 L + A NL A 1 NL , P ( E 2 ) = 1 − P ( E 1 ) . (12) wher e A 1 v , v ∈ { L , NL } means UE biased r eceived power at LoS or NLoS U A V -UE link is lar ger than from APs, could be expr essed as A 1 v = P P U B U G U R − α v 1 > P a B a G a R − α a 2 (13) = 1 − Z ∞ 0 e − λ U π ρ ( r 2 ) × 2 λ a e − 2 λ a r 2 d r 2 , wher e ρ ( r 2 ) = max 0 , ξ − 2 α v 21 r 2 α a α v 2 − H 2 U . Pr oof. See Appendix A. B. Serving Distance Distribution Due to distinct association scenarios under E 1 and E 2 , the corresponding serving distance distributions are ev aluated separately to precisely reflect their influence on cov erage performance in heterogeneous networks. Lemma 2. Conditioned on the event E 1 and E 2 , the PDF of the serving distance is given by f R ( r |A 1 v ) = 2 π λ u r P ( A 1 v ) e − π λ u ( r 2 − H U 2 ) − 2 λ a ξ 1 /α a 21 r α v /α a , (14) f R ( r |A 2 v ) = 2 λ a P ( A 2 v ) e − 2 λ a r − π λ u ρ ( r ) . (15) wher e ρ ( r ) = max(0 , ξ − 2 α v 21 r 2 α a α v − H U 2 ) , ξ 21 = P a B a G a P U B U G U , v ∈ { L , NL } , Pr oof. See Appendix B. C. Coverag e Pr obability Power control is employed to mitigate path loss and enhance reliability in collaborati ve downlink transmission. F or the k -th layer AP at distance r 2 , the transmit power is defined as P 2 = C r α a 2 , (16) where α a is the path loss exponent and C is a power scaling constant. T o ensure tractability , po wer control is applied only to desired signals from the nearest AP in each layer on the typical line, while interference remains unaffected. This selective strategy decouples the desired signal from the interference field, simplifying SINR analysis under PLP-induced spatial correlation. It also enables tractable characterization of cover - age in multi-layer cooperativ e networks. Thus, cov erage probability is P C = X v ∈{ L , NL } A v A 1 v P ( P U G U h U r − α v 1 σ 2 + I 1 + I 2 > γ 0 ) (17) + A v A 2 v P ( P K k =1 P a G a h ( k ) a 0 r − α a 2 σ 2 + I 1 + I 2 > γ 0 ) , where the main interference is from non-typical U A V I 1 and all APs I 2 for the typical receiver associated with U A V . The Laplace transform of interference from non-typical U A V I 1 is deriv ed as (18) [ [16], Eq.(A.4)], I 2 is defined as I 2 = K X k =1 X x i ∈ Ξ L 0 P a G a h a 0 r α a x i k | {z } I 21 + K X k =1 X x i ∈ Ξ L i \ Ξ L 0 P a G a h a 1 r α a x i k | {z } I 22 (21) where, I 21 is the interference typical line APs in all layers, I 22 is the interference from non-typical line in all layers. The Laplace transform of the total interference I 2 simplifies to L I 2 ( s ) = exp {− 2 π · πλ l (22) × K X k =1 λ a k Z ∞ 0 1 − 1 + sP a G a m 2 r − α a − m 2 ! r dr ) . L I 1 ( s ) = E Φ u h Q x i ∈ Φ u \ x o p L ( r x i )E h U h e − sP U G U h U r − α L x i i + p NL ( r x i )E h U h e − sP U G U h U r − α NL x i ii = exp {− λ U − 1 × { 2 π R 0 v (1) max ( θ ) R v (1) min ( θ ) 1 − (1 + sP U G U l − α L m L ) − m L v p L (y) ζ (2) ( v )d v d ϑ + 2 π R 0 ∞ R v (2) min ( θ ) 1 − (1 + sP U G U l − α L m L ) − m L v p L (y) λ 2 U d v d ϑ + 2 π R 0 v (1) max ( θ ) R v (1) min ( θ ) 1 − (1 + sP U G U l − α NL m NL ) − m L v p NL (y) ζ (2) ( v )d v d ϑ + 2 π R 0 ∞ R v (2) min ( θ ) 1 − (1 + sP U G U l − α NL m NL ) − m NL v p NL (y) λ 2 U d v d ϑ } , (18) where v (1) min ( ϑ ) = max[ d, 2 x cos ϑ ] , v (1) max ( ϑ ) = max[2 d, 2 x cos ϑ ] , v (2) min ( ϑ ) = max[2 d, 2 x cos ϑ ] and v (2) max ( ϑ ) = ∞ , x = p r 2 − H 2 U , l = q r 2 + v 2 − 2 v cos ϑ p r 2 − H 2 U . L I 1 ( s ) = E Φ u Y x i ∈ Φ u \ x o p L ( r x i ) E h U e − sP U G U h U r − α L x i + p NL ( r x i ) E h U e − sP U G U h U r − α NL x i (19) = exp − 2 π λ Z ∞ r h 1 − p L ( r ) 1 + s P U G U r − α L m 1 − m 1 + p NL ( r ) 1 + s P U G U r − α NL m 1 − m 1 i r dr ! . P C = P ( SINR > γ 0 ) (20) = A v X v ∈{ L , NL } A 1 v Z ∞ h m − 1 X k =0 ( − s □ ) k k ! d k d s □ k h e − s ′ σ 2 L I ( s □ ) i f R ( r 1 ) d r 1 + A 2 v k S X n =1 ( − 1) n +1 k S n e − sσ 2 L I ( s ) , where s □ = mγ 0 P U G U r α v 1 , s = nη γ 0 C G a , η = k S ! − 1 /k S θ S . For the typical receiv er associated with AP , the interference I 1 from all UA V and I 2 from all APs on non-typical lines. The Laplace transform of I 1 can be expressed as (19). The Laplace transform of I 2 can be expressed as L I 2 ( s ) = K Y k =1 exp − 2 π λ l R ∞ 0 [1 − exp( − 2 λ a × R ∞ 0 1 − 1 (1+ θ ( x,y )) m 2 dx )] dy , (23) where θ ( x, y ) = sP a G a m 2 ( x 2 + y 2 ) α a / 2 . Thus, the cov erage probability (17) can be derived as P C in (20), where s ′ = mγ 0 P U r α 1 1 . Pr oof. See Appendix C. I V . N U M E R I C A L R E S U L T S W e consider UA V distributed as a homogeneous PPP with density λ U = 10 / km 2 at a fix ed altitude of 100 , m . Roads follow a PLP with line density µ l = 10 / km , and APs are deployed along each road as a 1-D PPP with density λ a = 2 / km across K = 3 layers. F or simplicity , U A V and APs are assumed to have identical characteristics: transmit powers P U = 30 dBm , P a = 23 dBm ; path loss exponents α L = 2 , α NL = 3 , and α a = 3 ; LoS model parameters a = 12 . 08 , b = 0 . 11 ; mainlobe antenna gains G U = G a = 1 (linear scale); selection biases B U = B a = 0dB ; and Nakagami fading parameters m L = 3 , m NL = 3 , m 21 = m 22 = 3 , power scaling constant C = 10 − 7 . -10 -5 0 5 10 Threshold 0 (dB) 0 0.2 0.4 0.6 0.8 Coverage probability f U =28GHz ,f a =26GHz f a =26GHz f U =f a =28GHz simu. 20% 1300% 0 < -6dB Fig. 2. Cov erage probability versus SNR threshold. Fig. 3. Cov erage probability versus U A V density . ( γ 0 = 0dB ) Fig. 2 shows the cov erage probability with the change of SINR threshold for 3 scenarios, pure AP , adding UA V , and adding U A V with dif ferent frequency bands, resepectiv ely . The simulation results is almost same with theoretical results. It is observed that adding UA V with different frequencies achiev es the highest cov erage probability , about 20% absolute improv ement than with same frequency . For lo w-SNR regime ( γ 0 < − 6dB ), pure AP coverage is much better than with U A V , because of the additional interference from U A V . Fig. 3 illustrates the cov erage probability as a function of U A V density and UA V altitude. It is observed that increasing the U A V density improv es coverage probability due to a higher 10 20 30 40 50 60 Safety distance d (m) 0.34 0.35 0.36 0.37 0.38 0.39 Coverage Probability B U = 0, 2, 4, 6, 8, 10dB Fig. 4. Cov erage probability versus safety distance d with different bias B U in dB ( γ 0 = 0dB ). 2 2.5 3 3.5 4 NL 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 Coverage Probability L = 2.0, 2.4, 2.8, 3.2, 3.6, 4.0 Fig. 5. Cov erage probability versus LoS and NLoS path loss exponent ( γ 0 = 0dB ). chance of fa vorable LoS links. Howe ver , the improvement becomes less significant when the U A V density is already high, showing a saturation ef fect. Moreover , a moderate U A V altitude provides better performance by balancing the trade-off between path loss and LoS probability . Fig. 4 depicts the coverage probability as a function of the safety distance d for v arious U A V selection biases B U . It can be observed that increasing B U improv es the coverage performance, as a larger bias encourages users to associate with UA V , which typically provide better LoS conditions. In addition, a lar ger safety distance slightly enhances the cov erage probability by mitigating strong interference from nearby U A V . Fig. 5 illustrates the coverage probability versus the NLoS path loss exponent α NL , with different values of the LoS path loss exponent α L . It is observed that the coverage probability increases with α NL , as higher attenuation in NLoS links reduces interference from distant APs. Con versely , a lower α L leads to better cov erage due to less attenuation in LoS channels. The best performance is achieved when α L is small and α NL is large, highlighting the importance of strong LoS connectivity and suppressed NLoS interference. V . C O N C L U S I O N This paper analyzed the performance of U A V -assisted vehic- ular cell-free networks using a stochastic geometry frame work that accounts for practical road-constrained deployments and realistic wireless propagation. Roads were modeled by PLP , with vehicles and access points distributed along the roads via independent 1-D PPPs. T o manage the analytical com- plexity introduced by signal aggregation from multiple APs, a distance-based power control strategy was proposed. Simula- tion results validated the theoretical analysis and rev ealed the impact of key system parameters on the cov erage probability . A C K N O W L E D G M E N T This work is financed by the European Commission under the Horizon Europe MSCA programme (HORIZON-MSCA- 2024-SE-01-01), Grant Agreement No. 101236523 (AeroNet project). A P P E N D I X A. Pr oof of Lemma 1 T o ev aluate the association probability of a typical receiv er with a U A V , we consider the condition under which the receiv ed po wer from the U A V exceeds that from the strongest AP . Specifically , we derive the probability as P ( P U B U G U R − α v 1 > P a B a G a R − α a 2 ) = P ( R 1 < ξ − 1 α 1 21 R α a α v 2 ) ( a ) = E R 2 P ( R 1 < ξ − 1 α v 21 R α a α v 2 | R 2 ) (24) = Z ∞ 0 F R 1 ( ξ − 1 α v 21 r α a α v 2 ) f R 2 ( r 2 )d r 2 ( b ) = Z ∞ 0 h 1 − e − λ u πρ ( r 2 ) i 2 λ a e − 2 λ a r 2 d r 2 ( c ) = 1 − Z ∞ 0 e − λ u πρ ( r 2 ) 2 λ a e − 2 λ a r 2 d r 2 , where ρ ( r 2 ) = max(0 , ξ − 2 α v 21 r 2 α a α v 2 − H U 2 ) , ξ 21 = P a B a G a P U B U G U , v ∈ { L , NL } , ( a ) is rewritten using conditional probability , where we condition on the value of R 2 , ( b ) follows from cumulativ e distrib ution F R 1 ( x ) and the probability density f R 2 ( x ) , ( c ) follows from integral split, then proof is com- pleted. B. Pr oof of Lemma 2 W e now deriv e the conditional CDF of the distance from the typical receiv er to its serving U A V , conditioned on the association event A 1 v . This conditional CDF is denoted as F R 1 ( r | A 1 v ) , and is giv en by F R ( r |A 1 v ) = P ( R 1 ≤ r | A 1 v ) ( a ) = 1 − P ( R 1 > r , A 1 v ) P ( A 1 v ) (25) ( b ) = 1 − 1 P ( A 1 v ) P r < R 1 < ξ − 1 /α v 21 R α a /α v 2 ( c ) = 1 − 1 P ( A 1 v ) Z ∞ ξ 1 /α v 21 r α v /α a nh F R 1 ξ − 1 /α v 21 r α a /α v 2 − F R 1 ( r )] × f R 2 ( r 2 ) } , where ( a ) follows from the definition of conditional probabil- ity , ( b ) incorporates the e vent condition A 1 v , and ( c ) applies the law of total probability over R 2 . Accordingly , the conditional PDF of R 2 follows from the same deriv ation steps as F R ( r | A 2 v ) = 1 − 1 P ( A 2 v ) Z ∞ ξ 1 /α a 12 r α a /α v (26) h F R 2 ξ − 1 /α a 12 r α v /α a 1 − F R 2 ( r ) i f R 1 ( r 1 ) dr 1 . Differentiating with respect to r , we get the conditional PDF f R ( r |A 1 v ) = d dr F R 1 ( r |A 1 v ) (27) = 1 P ( A 1 v ) f R 1 ( r ) P R 2 > ξ 1 /α v 21 r α v /α a . Having P ( R 2 > x ) = exp( − 2 λ a x ) , Thus, the conditional PDF becomes: f R ( r |A 1 v ) = 2 π λ u r P ( A 1 v ) e − π λ u ( r 2 − H U 2 ) − 2 λ a ξ 1 /α v 21 r α v /α a , (28) f R ( r |A 2 v ) = 2 λ a P ( A 2 v ) e − 2 λ a r − λ u π ρ ( r ) , (29) where ρ ( r ) = max(0 , ξ 2 α a 12 r 2 α a α v − H U 2 ) , ξ 21 = P a B a G a P U B U G U , ξ 12 = P U B U G U P a B a G a . C. Pr oof of Coverag e Pr obability W e first consider the event E 1 , where the typical receiv er is served by a UA V from tier-1. The coverage probability under this ev ent can be expressed as P C = P P U G U h U r − α 1 1 σ 2 + I > γ 0 (30) = Z ∞ H U m − 1 X k =0 ( − s □ ) k k ! · d k d s □ k h e − s □ σ 2 · L I ( s □ ) i f R ( r 1 ) d r 1 , where s □ = mγ 0 P U G U r α 1 1 . Proof . Following the same approach presented in [ [19], Eq.(32)], so skipped, Our goal is to e valuate the coverage probability P ( γ > γ 0 ) . T o this end, we first characterize the distribution of the total receiv ed signal power from the nearest APs in each layer . Since the exact distribution is analytically intractable, we adopt a second-order moment matching to approximate the aggregated signal power by a Gamma distribution. Since the typical receiver is served by K cooperating APs, the total receiv ed signal power can be written as C G a P K i =1 h ( k ) a 0 . If S = P K i =1 h ( k ) a 0 , where each h a 0 follows a Gamma distribution h a 0 ∼ Γ( k i , θ i ) , then the expectation of S is given by E [ S ] = P K i =1 k i θ i , and the variance of S is giv en by V ar( S ) = P K i =1 k i θ 2 i . W e approximate S by a Gamma distribution Γ( k S , θ S ) [20], where k S = ( E [ S ]) 2 V ar ( S ) and θ S = V ar ( S ) E [ S ] , substituting the mean and variance expressions as k S = ( P K i =1 k i θ i ) 2 P M i =1 k i θ 2 i , and θ S = P K i =1 k i θ 2 i P M i =1 k i θ i . The cov erage probability becomes P C G a P K i =1 h a 0 I + σ 2 > γ 0 ! = P S > µ ( I + σ 2 ) , (31) where µ = γ 0 C G a , S ∼ Γ( k S , θ S ) . Assuming k S is an integer , we can obtain P C ( γ 0 ) = P h a 0 > γ 0 C G a I 1 + I 2 + σ 2 (32) ( a ) ≈ 1 − E Φ c 1 − e − ηγ 0 C G a ( I + σ 2 ) k S = k S X n =1 ( − 1) n +1 k S n E h e − nηγ 0 C G a ( I + σ 2 ) i = k S X n =1 ( − 1) n +1 k S n e − sσ 2 L I ( s ) , where s = nη γ 0 C G a , η = k S ! − 1 /k S θ S , and we have used the assumption that k S is integer , ( a ) comes from Appendix A.2 of [16]. Then proof is completed. R E F E R E N C E S [1] Y . Qin, M. A. Kishk, and M.-S. Alouini, “Stochastic geometry-based analysis of cell-free massi ve mimo systems with aerial users, ” IEEE T rans. Commun. , pp. 1–1, 2024. [2] C. Fan, X. Zhou, T . Zhang, W . Y i, and Y . Liu, “Cache-enabled uav emergency communication networks: Performance analysis with stochastic geometry , ” IEEE T rans. V eh. T echnol. , vol. 72, no. 7, pp. 9308–9321, 2023. [3] E. V . Pothan and S. Kashyap, “Cell-free massiv e mimo enabled wireless communication with uavs in underlay spectrum access networks, ” IEEE T ransactions on Communications , vol. 71, no. 12, pp. 7363–7377, 2023. [4] C. D’Andrea, A. Garcia-Rodriguez, G. Geraci, L. G. Giordano, and S. Buzzi, “ Analysis of ua v communications in cell-free massi ve mimo systems, ” IEEE Open Journal of the Communications Society , vol. 1, pp. 133–147, 2020. [5] C. Diaz-V ilor, A. Lozano, and H. Jaf arkhani, “Cell-free uav netw orks: Asymptotic analysis and deployment optimization, ” IEEE T rans. W ir e- less Commun. , vol. 22, no. 5, pp. 3055–3070, 2023. [6] R. Alkanhel, G. Atteia, M. Amine Ouamri, M. Saleh Ali Muthanna, D. Singh, A. Aziz, and A. Muthanna, “Next-gen connectivity: Exploring uav sw arm applications in cell-free massi ve mimo for iiot, ” IEEE Access , vol. 12, pp. 152 045–152 057, 2024. [7] B. Hidayat and I. Zakia, “Cell free mobile communication in uav system as mobile infrastructure solution for smart system platforms: A survey , ” in 2023 10th International Conference on ICT for Smart Society (ICISS) . IEEE, Conference Proceedings, pp. 1–6. [8] Z. Ding, X. Sun, R. Jiang, X. Lu, Z. Zhong, and D. W . K. Ng, “Uav- enabled cell-free networks: Joint optimization for user fairness, ” in 2023 IEEE 98th V ehicular T echnology Confer ence (VTC2023-F all) . IEEE, Conference Proceedings, pp. 1–6. [9] L. Xu, Q. Zhu, W . Xia, T . Q. S. Quek, and H. Zhu, “W eighted sum power minimization in ua v empowered cell-free massiv e mimo systems, ” in 2023 IEEE Globecom W orkshops (GC Wkshps) . IEEE, Conference Proceedings. [10] X. Song, D. Li, J. T ang, N. Zhao, Z. Y ang, Z. Yin, and Z. W u, “En- hancing cell-free network: Joint beamforming and location optimization via uav-irs, ” IEEE T rans. V eh. T echnol. , vol. 74, no. 1, pp. 1196–1208, 2025. [11] T .-N. Tran and G. Interdonato, “Energy efficienc y optimization in integrated satellite-terrestrial uav-enabled cell-free massive mimo, ” in 2024 IEEE 25th International W orkshop on Signal Pr ocessing Advances in W ireless Communications (SP A WC) . IEEE, Conference Proceedings, pp. 711–715. [12] K. Shi, Z. Dai, and Y . Zeng, “Dynamic ap association for uav-centric aerial-ground communication with cell-free massiv e mimo, ” in 2023 International Confer ence on Communications, Computing and Artificial Intelligence (CCCAI) . IEEE, Conference Proceedings, pp. 139–144. [13] Y . Zhou, M. Xiu, D. Zhai, Z. He, H. Gou, and G. Zhang, “Modeling and analysis of uav-assisted cellular networks with non-orthogonal multiple access, ” in 2024 3r d International Conference on Computing, Communication, P erception and Quantum T echnology (CCPQT) . IEEE, Conference Proceedings, pp. 195–199. [14] Q. Ji and Y . Zhu, “Delay sensitive user association strategy in massive machine-type communications, ” Science China Information Sciences , vol. 68, no. 4, p. 149301, 2025. [15] S. Han, E. Alsusa, M. Ahmad Al-Jarrah, and M. AlaaEldin, “On the achiev able error rate performance of pilot-aided simultaneous commu- nication and localization with a ground-to-air model, ” IEEE T ransactions on W ir eless Communications , vol. 25, pp. 5521–5538, 2026. [16] Y . Zhu, G. Zheng, and M. Fitch, “Secrecy rate analysis of uav-enabled mmwav e networks using mat ´ ern hardcore point processes, ” IEEE J. Sel. Ar eas Commun. , vol. PP , pp. 1–1, 04 2018. [17] A. Al-Hourani, S. Kandeepan, and S. Lardner, “Optimal lap altitude for maximum cov erage, ” IEEE W ireless Commun. Lett. , vol. 3, no. 6, pp. 569–572, 2014. [18] Y . Zhu, Z. Ding, and X. Y ou, “T opological perspectiv e of large-scale multi-cell deployment of excitable wav eguide dielectrics, ” IEEE W ir eless Communications Letters , vol. 15, pp. 151–155, 2026. [19] V . V . Chetlur and H. S. Dhillon, “Coverage analysis of a vehicular network modeled as cox process driven by poisson line process, ” IEEE T rans. W ireless Commun. , vol. 17, no. 7, pp. 4401–4416, 2018. [20] R. W . Heath Jr , T . W u, Y . H. Kwon, and A. C. K. Soong, “Multiuser mimo in distributed antenna systems with out-of-cell interference, ” IEEE T rans. Signal Process. , vol. 59, no. 10, pp. 4885–4899, 2011.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment