UAV 지원 도로 기반 셀프리 네트워크의 마텐 하드코어 모델링
본 논문은 도로를 포아송 선 프로세스(PLP)로 모델링하고, 각 도로에 1‑차원 PPP로 배치된 다계층 지상 AP와 마텐 하드코어(MHC) 프로세스로 배치된 UAV 기반 3‑차원 베이스 스테이션을 결합한 셀프리 차량 네트워크를 제안한다. 거리 기반 전력 제어와 편향된 수신 전력 기반 사용자 연합 방식을 도입해, 스터디된 커버리지 확률을 스토캐스틱 기하학적 도구와 라플라스 변환을 이용해 분석한다. 수치 결과는 UAV 밀도, 안전 거리, 편향값, …
저자: Chenrui Qiu, Yongxu Zhu, Bo Tan
본 논문은 차세대 무선 네트워크에서 차량‑대‑인프라(V2I) 통신을 지원하기 위한 새로운 셀프리(cell‑free) 아키텍처를 제안한다. 기존 연구들은 주로 평면에 무작위로 배치된 AP를 가정했으나, 실제 도로 환경에서는 AP가 도로에 따라 선형으로 배치된다는 점을 간과하고 있다. 이를 해결하기 위해 저자는 도로를 포아송 선 프로세스(PLP) Φ_l 로 모델링하고, 각 도로에 K 계층의 지상 AP를 1‑차원 포아송 점 프로세스(1‑D PPP) λ_a^{(k)} 로 배치한다. 이러한 구조는 “도로‑제한 셀프리” 라는 새로운 개념을 도입하여, 사용자가 자신이 속한 도로 상의 가장 가까운 AP와 각 계층별로 협업하게 만든다.
UAV는 기존 지상 인프라의 사각지대를 메우고 3‑차원 커버리지를 확장하기 위해 도입된다. UAV는 고도 H_U 에 고정된 고도에서 비행하며, 안전 거리 d 를 보장하기 위해 마텐 하드코어(MHC) 타입‑II 프로세스 Φ_U 로 모델링한다. MHC는 부모 PPP Φ_p 를 얇은 마킹 과정을 통해 thinning 함으로써, 최소 거리 d 를 만족하는 점 집합을 생성한다. 이때 UAV의 실제 밀도 λ_U = (1−e^{−λ_pπd^2})/(πd^2) 로 표현되며, 두 UAV 사이의 거리 v 에 대한 2차 제품 밀도 ζ^{(2)}(v) 를 이용해 UAV 간 상관성을 정량화한다.
채널 모델은 UAV‑UE 링크가 LoS와 NLoS 두 가지 상태를 가질 수 있음을 반영한다. 수평 거리 z 에 대해 LoS 확률 p_L(z)=1/(1+ a exp(−b(180/π tan^{−1}(H_U/z)−a))) 로 정의하고, NLoS 확률은 1−p_L(z) 로 설정한다. UAV와 지상 AP 모두 방향성 안테나를 사용하며, 메인 로브 이득 G_U, G_a 와 사이드 로브 이득 g_U, g_a 를 갖는다. 페이딩은 Nakagami‑m (m_L, m_NL, m_{21}, m_{22}) 로 모델링하고, 대규모 감쇠는 경로 손실 지수 α_L, α_NL, α_a 로 표현한다.
사용자 연합 정책은 “가장 큰 편향 수신 전력” 기준이다. UAV와 AP 각각에 선택 편향 B_U, B_a 를 부여하여, 사용자가 UAV에 연결될 확률을 조절한다. 연합 기준은
r* = arg max { B_U P_U G_U r^{−α_v}, B_a P_a G_a r^{−α_a} }
이며, 여기서 r 은 3‑D 거리( UAV ) 혹은 1‑D 거리( AP )를 의미한다. UAV와의 수평 거리 z 가 Rayleigh 분포 f_Z(z)=2πλ_U z e^{−πλ_U z^2} 를 따르므로, LoS 연합 확률 A_L = ∫_0^∞ p_L(z) f_Z(z) dz 로 계산된다.
SINR은 두 경우로 나뉜다. (i) 사용자가 UAV에 연합한 경우:
γ = P_U G_U h_v r^{−α_v} / (σ^2 + I_1 + I_2)
여기서 I_1 은 다른 UAV(비편향)로부터의 간섭, I_2 는 모든 지상 AP 로부터의 간섭이다. (ii) 사용자가 AP에 연합한 경우:
γ = Σ_{k=1}^K P_a G_a h^{(k)} r_k^{−α_a} / (σ^2 + I_1 + I_2)
여기서 Σ는 K 계층의 가장 가까운 AP 로부터의 협업 신호를 의미한다.
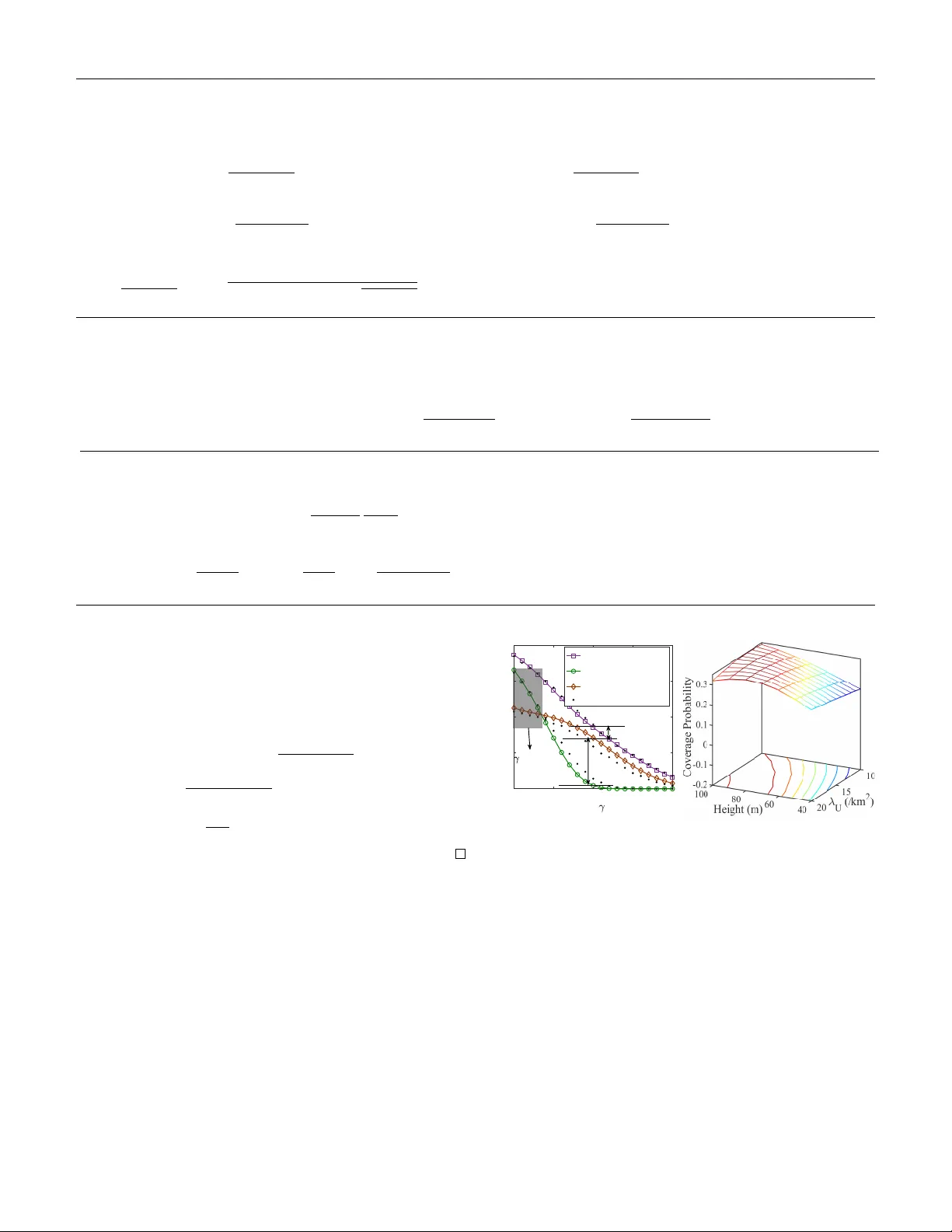
분석의 핵심은 거리 기반 전력 제어 P_2 = C r^{α_a} 를 도입해, 가장 가까운 AP의 전송 전력을 거리 보정함으로써 원하는 신호와 간섭을 분리하는 것이다. 이는 라플라스 변환을 이용한 간섭 특성 L_{I1}(s), L_{I2}(s) 를 구할 때, 원하는 신호와 간섭이 독립적인 형태로 나타나게 하여, 커버리지 확률 P_C = P(γ ≥ γ_0) 를 닫힌 형태로 도출할 수 있게 한다.
수학적 유도는 다음과 같이 전개된다. 먼저 UAV와 AP 각각에 대한 서빙 거리 분포 f_R(r|E_1), f_R(r|E_2) 를 구하고, 편향된 연합 확률 A_1^v, A_2^v 를 Lemma 1 과 Lemma 2 로 표현한다. 이후, Nakagami‑m 페이딩의 누적분포함수와 라플라스 변환을 결합해,
P_C = Σ_{v∈{L,NL}} A_v
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기