Parameter Update Laws for Adaptive Control with Affine Equality Parameter Constraints
In this paper, constrained parameter update laws for adaptive control with convex equality constraint on the parameters are developed, one based on a gradient only update and the other incorporating concurrent learning (CL) update. The update laws ar…
Authors: Ashwin P. Dani
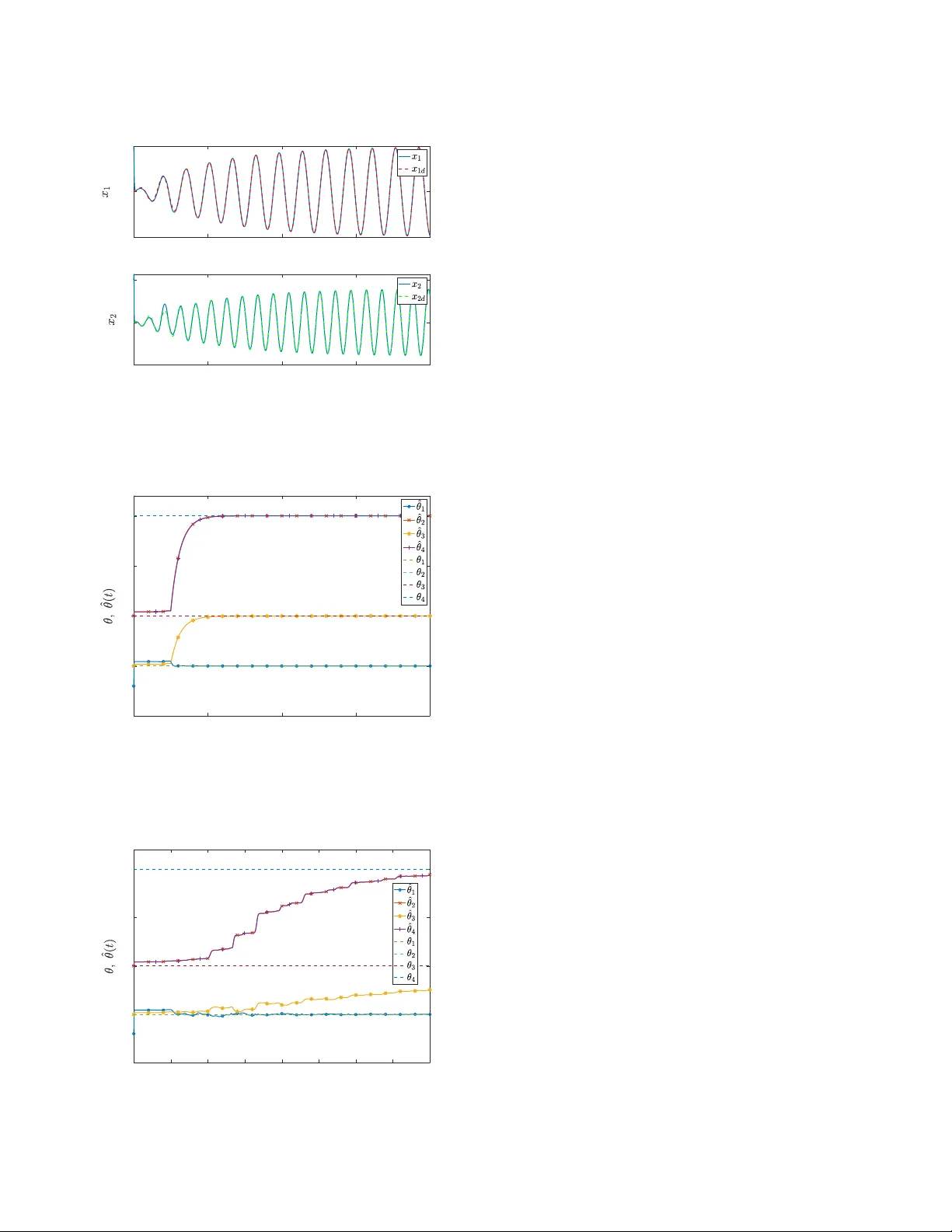
1 P aramet er Update La ws for Adapti v e Control with Af fine Equality Pa rameter Con straints Ashwin P . Dani Abstract —In this paper , constrained p arameter u p date laws fo r adaptive control with conv ex equality constraint on the parameters are dev eloped, one based on a gradient onl y update and the other incorporating concurrent learning (CL) update. The update laws are deriv ed by solving a constrained optimiza- tion problem with affine equality constraints. This constrained problem is ref ormulated as an eq u iv alent un constrained prob- lem in a new v ariable, thereby eliminating the equality con- straints. The resulting update law is integrated with an adap t ive trajectory trackin g controller , enabling online learning of the unknown system parameters. L yapunov stability of the closed- loop system with the equality-constrained param eter up d ate law is established. The effectiv eness of t he p roposed equality- constrained adaptive contr ol law is demonstrated thro ugh simulations, validating its ability to maintain constraints on the p arameter estimates, achieving con ver gence to the true parameters fo r CL-b ased update law , an d achieving asymptotic and exponent i al tracking performance for constrained gradient and constrained CL-based upd ate l aws, re spectively . I . I N T RO D U C T I O N Adaptive control is a con trol m ethod which achie ves control objectiv es in the pr esence o f par ametric m odel u n- certainties. It has a rich history of developments over several decades [ 1 ]–[ 3 ]. Proble m s such as parameter drifts a nd the identification of m odel parameter s wh ile achieving contr o ller tracking/r egulation ob jecti ves have been addr e ssed in sev eral papers. In th is paper, we ad dress the pr oblem of injecting prior knowledge ab out the parameters in the form of con- straints on th e par ameter update laws. Specifically , we d esign parameter update laws that incorpor ate equality constraints on the param eter estimates, given in the f orm of Aθ = d . V ariou s parameter up date laws have been pro posed for adaptive contr ol. Th e grad ient upda te law is one o f the most basic forms studied. T o prevent parameter drift, σ and e - modification algor ithms are developed. Smo oth projectio n algorithm s keep the par ameters b o unded within a prescrib ed conv ex set [ 2 ], [ 4 ]. The L 1 -adaptive contr oller uses a lo w- pass filter in the feedb ack loo p to en f orce d esired transient perfor mance while allowing fast adaptation. Parameter up date laws that use both tracking and prediction errors, referred to as co mposite adap tation [ 5 ] have been developed, and can achieve fast p arameter conv ergence while ach ieving the control objective. The se par ameter update laws typically assume persistency o f excitation (PE) of the regressor to achieve parame te r c o n vergence. Using least squares tech- nique of regression problem, parameter u p date laws ca lled A. P . Dani is with the Departmen t of Electrica l and Computer Engineeri ng at Uni versit y of Connect icut, Storrs, CT 06269. concur r ent learning (CL) and integral concur r ent learning (ICL) are d ev eloped. Th e CL/ICL-based parameter update laws can achieve parame ter conv ergence with finite excitation (FE) c o ndition, which is a wea ker/m ilder cond ition than PE. Dyn amic regressor extension an d mixing (DREM) can achieve param e ter convergence un der milder co nditions than PE [ 6 ]. Using the tech niques in optimiza tio n for pa r ameter learning, momentum - based tools have been used to design parameter up date laws in [ 7 ], [ 8 ], with the g oal of imp roving transient perfo r mance. For deep neur al netw ork, parameter update laws are designed in [ 9 ]. In certain applications, addition a l constraints on the pa- rameters, such as sym metry with eigenv alue bound s or positive definiten ess of p arameter matrices, are importan t for ensuring physically con sistent para m eter estimates and improving controller ro bustness. Th e metho ds in [ 10 ], [ 1 1 ] develop parameter u pdate laws based on Bregman diver gence metrics to enfor ce positive definiten e ss of param eter matrices. The method in [ 12 ] incorporates symmetric matrix con- straints with eigenv alue b ounds into the p arameter estima tio n law . These a p proach es enable the incor poration of specific structural co nstraints present in the system dynamics. In [ 13 ], an adaptive c o ntroller that incorpor a tes knowledge o f dynamics is developed using L y apunov-b ased co n trol and parameter update law desig n . I n so me application s, it is critical to strictly en force up per an d lower boun d co nstraints on the parameters. For example, this ar ises when estimating control effecti veness m atrix g ( x ) in the con tr ol-affine system ˙ x = f ( x ) + g ( x ) u [ 14 ], or wh en parameter constra in ts require maintainin g the norm of th e p arameter vector within prescribed bo unds. Constrained p arameter update laws usin g Barrier metho ds, as stud ied in optim iz a tio n, are developed in [ 14 ], [ 15 ]. In this paper, a n ew par ameter update law that incorp orates affine equality constraints of the form Aθ = d on the parameter estimates is developed. Th e op tim ization viewpoint of developing par ameter upd ate law shown in [ 2 ], [ 10 ], [ 16 ] is used to inco rporate suc h constraints. As shown in [ 1 0 ], [ 16 ], the ob jecti ve fu nction used to derive gradien t update law is conv ex. When affine eq uality constraints on the p arameters (which are con vex con straints) are added, the resulting pa- rameter estimation p roblem b ecomes a co n vex program . T w o new equality-c o nstrained p arameter u pdate laws ar e desig n ed - on e based o n a gradient upd ate law and the other ba sed on a CL-based upd ate law . The objective fun ction is con vex for the gradient-b ased update law , and strictly conv ex for the 2 CL-based update law . T o d esign p arameter up date laws with equality co nstraints, an equ iv a lent u n constrained optimizatio n is formu late d by p rojecting th e p arameter estimates o nto th e constrained set [ 17 ]. This y ields an op timization problem in a new r educed-d imensional variable z ( t ) , wher e th e par a meter estimate ˆ θ ( t ) is a f unction o f z ( t ) . Explicit formu las f or ˆ θ ( t ) in terms of z ( t ) ar e derived, where z ( t ) is updated using a differential equation, resulting in a red u ced-dime nsional parameter up date law . Stability of the p a r ameter update law , together with the tracking error d y namics induced by a tracking controller, is established via L yapunov analysis. Using this co nstraint-elimin ation formu lation of the con vex progr am, ther e is no need to introdu ce Lagrang e mu ltipliers to en force the p arameter constra ints, w h ich simplifies the sta- bility analy sis and yields a reduced - dimensiona l upd ate law . Both equality-co n strained gradient and CL-based parameter update laws are tested in simulation s using constrain ts of the form θ i − θ j = 0 . Th e simulations validate th at the pr oposed update laws maintain the param eter con straints f or all time while achie ving the control objec ti ves. In the simulations, the parameters may not con verge to true values for the equality-co nstrained grad ient-based update law , whereas the parameters co nvergence is obtained for equ ality-constrain ed CL-based u p date law . Notations: For any matr ix A ∈ R n × m , N ( A ) denotes the null space, R ( A ) den otes the r a nge space. For a square matrix A , A ≻ 0 d enotes positive definite matrix A I I . S Y S T E M M O D E L A N D C O N T RO L O B J E C T I V E A. System Dynamics Consider the following sy stem ˙ x = f ( x ) + u (1) where x ( t ) ∈ R n is the system state, u ∈ R n is the co ntrol input, f : R n → R n is a locally Lipschitz continuous function wh ich is line arly para m etrizable, defined as f ( x ) = Y ( x ) θ (2) where Y : R n → R n × p is the regressor matrix and θ ∈ R p is an unknown parameter . The par ameters ar e suc h that they satisfy fo llowing affine equality co n straints Aθ = d (3) where d ∈ R m and A ∈ R m × p are constants. An example of such a constraint would b e ∃ i, j : θ i ( t ) − θ j ( t ) = 0 , i, j ∈ { 1 , .., p } , i 6 = j (4) Remark 1. The equality con straints are co n vex since the constraints ar e affine in θ . Remark 2. S uch parameter constraints imply tha t there is some prio r knowledge a bout parameters, e.g., r o bot lin k masses are equal to each other fo r r o bot dyn amics. Assumption 1 . The matrix A is full r ow rank and ∃ κ 1 , κ 2 > 0 such th at κ 1 I ≤ AA T ≤ κ 2 I . B. Contr oller Objective The control o b jectiv e is to track a desired trajectory x d ( t ) ∈ R n and com pute p a r ameter vector estimate ˆ θ ( t ) ∈ R p while maintaining p rescribed equ ality con stra ints of the form ( 3 ) on the parameter estimates. For th e contro l design , let’ s define trac k ing and parameter estimatio n erro rs as fol- lows e ( t ) = x ( t ) − x d ( t ) , ˜ θ ( t ) = θ − ˆ θ ( t ) (5) where ˜ θ ( t ) ∈ R p is th e parame ter estimation erro r . C. Adaptive Contr oller Design T o achieve the contro l objective, an adap ti ve trajectory tracking con troller is de sig n ed as u = ˙ x d − Y ˆ θ − k e (6) where ˙ x d ( t ) is the deriv ativ e of the desired tr ajectory , and k > 0 is the con trol gain. T aking the time deriv ati ve of ( 5 ) and substituting th e c o ntroller ( 6 ), the following clo sed -loop error system can be obtain e d ˙ e = Y ˜ θ − k e (7) The par ameter estimation er ror dynam ics is written as ˙ ˜ θ = − ˙ ˆ θ (8) In next sectio ns, gradient and CL-b ased parameter update laws ar e p resented that satisfy the affine equ ality con straints of the form ( 3 ). I I I . E Q UA L I T Y - C O N S T R A I N E D G R A D I E N T U P DAT E L AW In th is section , an equality-co nstrained g radient par ameter update law is d esigned. Th e affine equality constraint o n the parameter estimates can be written u sing ( 3 ) as follows A ˆ θ = d. (9) T o design th e constrained p a r ameter update law , consider th e following constrained minimization p roblem ˆ θ ∗ = min ˆ θ γ e T Y ˜ θ s . t . c ( ˆ θ ) = A ˆ θ − d = 0 , (10) where γ > 0 is a constant gain. An equiv alent constraint free for mulation of the c on vex op timization can be written by formulatin g a new variable z ∈ R p − m (see [ 17 ] Chapter 4, Elimina ting Equality Co n straints) ˆ θ 0 = A T ( AA T ) − 1 d ˆ θ = ˆ θ 0 + F z (11) where ˆ θ 0 ∈ R p represents a solution to e q uality constraint c ( ˆ θ ) = 0 , F ∈ R p × ( p − m ) is selected such that R ( F ) = N ( A ) . Remark 3. One way to choose F is to perform sin g ular va lue decompo sition (SVD) o f A = U Σ V T and choose last p − m 3 columns of V corr espon ding to N ( A ) . Th is will ensure that F is full colum n rank, i.e., rank p − m and R ( F ) = N ( A ) . The optimization p roblem can be refo rmulated in new variable z and the equ ality constraint can be eliminated as follows z ∗ = min z f ( z ) = min z γ e T Y ( θ − ˆ θ 0 − F z ) (12) The co n vex optimizatio n prob lems ( 10 ) and ( 12 ) are eq u iv a- lent ( see [ 17 ]) an d the optimal solu tion satisfies ˆ θ ∗ = ˆ θ 0 + F z ∗ (13) The gr a dient dynam ics of z can be comp uted u sing ( 12 ) as ˙ z = − ∇ z f ( z ) = γ F T Y T e (14) The par ameter u pdate law in redu ced dim ension is g iven by ˆ θ = ˆ θ 0 + F z ˙ z = γ F T Y T e (15) A. Err o r dyna mics The track ing error dynamics from ( 7 ) is expressed as ˙ e = − k e + Y ˜ θ (16) Using ( 15 ) the par ameter estimation error dynam ics is g i ven by ˙ ˜ θ = − ˙ ˆ θ = − ˙ ˆ θ 0 − F ˙ z ˙ ˜ θ = − γ F F T Y T e (17) B. Stability Analysis In th is subsectio n, stability of the tracking error d y namics ( 7 ) a n d eq uality-con strained g r adient parameter update law ( 15 ) is established. Theorem 1. If Assumptio n 1 is satisfied, for th e system shown in ( 1 ), the eq uality-con strained pa rameter upda te law ( 15 ) and the ad a ptive con tr oller ( 6 ) ensure global a symptotic trac king, i.e., k e ( t ) k → 0 as t → ∞ (18) and bounded parameter estimatio n err or with constrained satisfaction on the parameter estimates. Pr oo f. Let y = [ e T , ˜ θ T ] T ∈ R n + p be an au xiliary vector . Consider a L yap unov f unction V ( y ) = 1 2 e T e + 1 2 γ ˜ θ T ˜ θ (19) The bo unds on V ( y ) ar e λ 1 k y k 2 ≤ V ( y ) ≤ λ 2 k y k 2 (20) where λ 1 = min 1 2 , 1 2 γ , λ 2 = max 1 2 , 1 2 γ . T ime d eriv a- ti ve of V ( y ) y ields ˙ V = e T ( − k e + Y ˜ θ ) + ˜ θ T ( − F F T Y T e ) ˙ V = e T ( − k e ) + ˜ θ T ( Y T e − F F T Y T e ) ˙ V = − k e T e + ˜ θ T ( I − F F T ) Y T e (21) Since θ satisfies Aθ = d and ˆ θ is designe d to satisfy A ˆ θ = d , we have A ( θ − ˆ θ ) = 0 , = ⇒ A ˜ θ = 0 (22) This imp lies that ˜ θ ∈ N ( A ) . Since F is co nstructed using the orth onorma l column s of the N ( A ) (Remark 3 ), F F T is an o r thonor m al projecto r on to N ( A ) . So, for any ˜ θ ∈ N ( A ) F F T ˜ θ = ˜ θ = ⇒ ( I − F F T ) ˜ θ = 0 (23) Using ( 23 ) the deriv ati ve o f L yapun ov fu nction can be written as ˙ V = − k e T e ≤ 0 (24) Since V ( y ) is po siti ve definite ( PD) and ˙ V is negativ e sem i- definite (NSD), the system ( 7 )-( 17 ) is stable in the sense of L yapun ov , which means y ( t ) ∈ L ∞ . Computing the deriv ativ e of ˙ V y ields ¨ V = − k e T ( − k e + Y ˜ θ ) (25) Since e ( t ) , ˜ θ ( t ) ∈ L ∞ , ¨ V ∈ L ∞ , which mean s ˙ V is unifor m ly continuou s [ 5 ]. Using Bar b alat’ s lemma ˙ V → 0 as t → ∞ , which im plies k e k → 0 as t → ∞ . I V . E Q UA L I T Y - C O N S T R A I N E D C O N C U R R E N T L E A R N I N G U P DAT E L A W In this section, CL-ba sed parameter up date law with affine equality co nstraints is de r i ved. For the CL- b ased equality - constrained par ameter update law , pr ior data of state and control inp u t called as a history stack H = { x k , ˆ u k , ˙ ˆ x k } k = h k =1 is collected . Before d iscussing the parameter up date law , finite excitation (FE ) assumption is stated. Assumption 2. F or the history stack H = { x k , ˆ u k , ˙ ˆ x k } k = m k =1 the following condition is satisfied σ 2 I ≥ Y R ≥ σ 1 I (26 ) wher e Y R = P h k =1 Y T k Y k , σ 1 , σ 2 ∈ R + . The numerically computed derivatives of x ( t ) , ˙ ˆ x k computed at k th data point satisfies k ˙ ˆ x k − ˙ x k k ≤ ǫ fo r a small p ositive ǫ ∈ R + . Remark 4. Assump tio n 2 is a finite excitation conditio n that can be verified in r eal-time [ 18 ]. T o design the eq uality-con strained CL parameter up date law , consider a conve x con strained minimizatio n problem ˆ θ ∗ = min ˆ θ γ e T Y ˜ θ + k cl 2 ˜ θ T Y R ˜ θ s . t . c ( ˆ θ ) = A ˆ θ − d = 0 , (27) 4 where k cl is a positive co nstant. Similar to previous section, an equiv alent equ ality constraint free form u lation of the conv ex optimization can be written b y form ulating a new variable ˆ θ 0 = A T ( AA T ) − 1 d ˆ θ = ˆ θ 0 + F z (28) where ˆ θ 0 ∈ R p , F ∈ R p × ( p − m ) and z ∈ R p − m are defin ed in ( 11 ). The optimizatio n p roblem c an be written in new variable z as an uncon strained co n vex optimizatio n problem z ∗ =min z f C L ( z ) z ∗ =min z γ e T Y ( θ − ˆ θ 0 − F z ) + k cl 2 ( θ − ˆ θ 0 − F z ) T Y R ( θ − ˆ θ 0 − F z ) ( 29) The conve x o ptimization prob lems ( 27 ) and ( 29 ) are equ i v- alent (see Section 4.1.3 of [ 17 ]), which mean s the optimal solution satisfies ˆ θ ∗ = ˆ θ 0 + F z ∗ (30) The gr a dient dynam ics of z can be comp uted b y ˙ z = − ∇ z f C L ( z ) = γ F T Y T e + k cl F T Y R ˜ θ (31) The par ameter update law is given b y ˆ θ = ˆ θ 0 + F z ˙ z = γ F T Y T e + k cl F T Y R ˜ θ (32) Since ˜ θ ( t ) is not measu r able, the up date law in ( 32 ) is not implementab le, b ut can be used for analysis. In an imple - mentable f orm the eq uality-con strained CL-based parameter update law is given by ˆ θ = ˆ θ 0 + F z ˙ z = γ F T Y T e + k cl F T h X k =1 Y T k ( ˙ ˆ x k − u k − Y k ˆ θ ) (33) where ( 1 ) and ( 2 ) ar e used. A. Err o r dyna mics The tr acking error dynam ics using ( 7 ) c a n be expressed as ˙ e = − k e + Y ˜ θ (34) Using ( 32 ) th e pa rameter estimation error dyn a mics is giv en by ˙ ˜ θ = − ˙ ˆ θ = − γ F F T Y T e − k cl F F T Y R ˜ θ (35) B. Stability analysis In th is subsectio n, stability of the tracking err or d ynamics ( 7 ) and equality- constrained CL-based par a meter upd ate law ( 33 ) is established u sing L y apunov ana lysis. Theorem 2. If Assumptions 1 - 2 ar e satisfied, for the system shown in ( 1 ), the equality-co n strained parameter update law ( 3 3 ) an d the ada ptive con tr oller ( 6 ) ensur e g lobally exponentially stable tr acking performance with constrained satisfaction on the pa rameter estimates an d bo unded closed - loop signals. Pr oo f. Let y = [ e T , ˜ θ T ] T ∈ R n + p be an au xiliary vector . Consider a L yap unov fun ction V ( y ) = 1 2 e T e + 1 2 γ ˜ θ T ˜ θ (36) The bo unds on V ( y ) ar e λ 1 k y k 2 ≤ V ( y ) ≤ λ 2 k y k 2 (37) where λ 1 = min 1 2 , 1 2 γ , λ 2 = ma x 1 2 , 1 2 γ . Using ( 7 ) and ( 35 ), the tim e derivati ve of V ( y ) is com puted as ˙ V = e T ( − k e + Y ˜ θ ) + ˜ θ T ( − F F T Y T e − k cl γ F F T Y R ˜ θ ) (38) Using F F T ˜ θ = ˜ θ f r om ( 23 ) yields ˙ V = − k e T e − k cl γ ˜ θ T Y R ˜ θ (39) Using Assumptio n 2 Y R ≻ 0 , wh ich leads to ˙ V = − k e T e − k cl σ 1 γ ˜ θ T ˜ θ = − min (2 k , 2 k cl σ 1 ) V . (40) The following b ound can be developed o n y using ( 40 ) an d ( 37 ) k y ( t ) k ≤ µ o k y ( t 0 ) k e − µ 1 t (41) where µ 0 = q λ 2 λ 1 and µ 1 = min (2 k , 2 k cl σ 1 ) . Since k y k ∈ L ∞ , k ˜ θ k ∈ L ∞ , which implies ˆ θ ∈ L ∞ . Using ( 32 ), since ˆ θ 0 and F are constants, z ∈ L ∞ . Remark 5. F or the time period when the history sta c k data is co llec te d , λ min ( P m k =1 Y T k Y k ) is n ot full rank, thus, Assumption 2 is not satisfied. F or th is time period, the equality-co nstrained pa rameter upda te law ( 1 5 ) can be used, which ensur es tha t all th e closed-lo op sign als are b ounded . Remark 6. The da ta po ints H collected in history stack P m k =1 Y T k Y k can be replaced using sing ular value maximiza- tion algo rithm in [ 18 ], wh ich en sur es P m k =1 Y T k Y k is always incr easing, thus, Lyapunov functio n ( 36 ) serves as a commo n L yapu nov functio n [ 19 ]. 5 0 10 20 30 40 -10 0 10 x 1 0 10 20 30 40 Time (s) -5 0 5 x 2 Figure 1. T rajecto ry tracking with equality-co nstrained gradient parameter update law . V . S I M U L AT I O N S Simulations are carried out to demo nstrate the ap plicability of th e equa lity -constrained parame te r up date law in adaptive control setting. T h e following system dynamics similar to [ 19 ] is considered ˙ x = x 2 1 sin ( x 2 ) 0 0 0 x 2 sin ( x 1 ) x 1 x 1 x 2 θ + u (42) where x = [ x 1 x 2 ] T ∈ R 2 is th e state, u ∈ R 2 is th e contro l input, θ ∈ R 4 are the true par ameters whose values are given by θ = [5 5 10 20] T . The true parameters satis fy equality constraint θ 1 = θ 2 , which can b e written as ( 3 ) using A = 1 − 1 0 0 , d = 0 . (43) The desired trajectory is given by x d ( t ) = 10(1 − e − 0 . 1 t ) sin(2 t ) 0 . 4cos(3 t ) (44) A. Simulatio n for Equ ality-Constrained Gradient Law The contro ller in ( 6 ) is impleme n ted along with the equality-co nstrained par a m eter upd ate law g i ven in ( 15 ). Th e system state is initialized to x ( t 0 ) = [10 5] T , the parameters are initialized to ˆ θ ( t 0 ) = [4 . 5 4 . 5 4 . 5 1 5] T . This satisfies the parameter con straint a t the initial time. The contro l g ain is selected as k = 2 dia g { 10 , 50 } and γ = 0 . 4 , F is co mputed using N ( A ) giv en by F = h 0 . 7071 0 . 7071 0 0 0 0 1 0 0 0 0 1 i T (45) and ˆ θ 0 = 0 . The perf ormance of the equality -constrained ad aptive con- troller is sh own in Figs. 1 and 2 . It is o bserved fro m Fig. 2 that the p arameters estimated by the p roposed equality- constrained param eter up date law satisfy the parameter con - straints, i.e., ˆ θ 1 ( t ) = ˆ θ 2 ( t ) and the trackin g errors converge to zer o. 0 10 20 30 40 Time (s) 0 5 10 15 20 Figure 2. Paramet er estimates using equality-con strained gradient parameter update law . B. Simulatio n for Equ ality-Constrained CL Update Law In this simulation, equality-co nstrained CL- b ased update law is tested. The controller is implemen ted using con straints on ˆ θ for the same dyn amics and desired trajectories as th at of previous simulation use case but w ith different parameter set θ = [5 20 10 20 ] T . The parameter estimates are initialized to ˆ θ ( t 0 ) = [3 10 5 10] T such that the parameter constraints are satisfied. T h e contr ol gain is selected as k = 2diag { 10 . 50 } and parameter adaptation law gains are γ = 0 . 05 and k cl = 0 . 0008 . In th is ca se, A = [0 − 1 0 1] and d = 0 , for which F is compu ted u sing N ( A ) g i ven by F = h 0 . 7071 0 . 5 0 0 . 5 0 0 1 0 − 0 . 7071 0 . 5 0 0 . 5 i T (46) and ˆ θ 0 = 0 . From the simulation r esults sho wn in Figs. 3 - 4 , it is observed th a t the parame ters are e stimated wh ile the eq uality constraints on the p arameters are maintain ed f or all time, i.e., ˆ θ 2 ( t ) = ˆ θ 4 ( t ) and the tracking error conver ges to zero. The parameter estimates using gr adient u pdate law are shown in Fig. 5 u sing th e same gains used for the equality- constrained CL upd a te law . The paramete r s may n ot be identified corr e c tly by the gr adient u pdate law if the regressor is not PE. V I . C O N C L U S I O N In this paper, an eq uality-con strained parameter upda te law is d e veloped f or adap tive tra c king con trol u sing a conve x optimization formulatio n . Th e appr oach of d eriving a d aptive parameter update law using a minimization problem of an objective func tio n sub ject to affine equality con straints on the parameter estimates yie ld s co ntinuou s u pdate law solutions in a mo dified fo rm for bo th grad ie n t and CL-based update laws. L yapu nov stability analysis of the tracking error, parameter estimation erro r dy namics is con ducted which shows that the tracking error conver ge asymptotically and parameter estimation erro r rema ins boun ded fo r gradien t- based up date 6 0 10 20 30 40 -10 0 10 0 10 20 30 40 Time (s) -5 0 5 Figure 3. Traj ectory tracking with equalit y-constrain ed CL parameter update law . 0 10 20 30 40 Time (s) 0 5 10 15 20 Figure 4. Paramet er estimate s using equality-const rained CL paramete r update law , where ˆ θ 2 and ˆ θ 4 satisfy the equality constraint ˆ θ 2 − ˆ θ 4 = 0 . 0 5 10 15 20 25 30 35 40 Time (s) 0 5 10 15 20 Figure 5. Paramete r estimates using equality-c onstrained gradie nt update law , where ˆ θ 2 and ˆ θ 4 satisfy the equality constraint ˆ θ 2 − ˆ θ 4 = 0 . law and exponentially u nder FE co ndition f or th e CL-b ased update la w . By construction, th e af fine equality constrain ts on the p arameter estimates ar e al ways satisfied. Simu lation results validate the propo sed method in both the cases where equality constra in ts are pre ser ved o n the p arameter estimates. R E F E R E N C E S [1] A. M. Annaswamy and A. L. Fradko v , “ A histori cal perspecti ve of adapti ve control and learning, ” Annual Revi ews in Contr ol , vol . 52, pp. 18–41, 2021. [2] P . A . Ioannou and J. Sun, Robust adaptive contr ol . PTR Prentic e-Hall Upper Saddle Ri ver , NJ, 1996, vol. 1. [3] M. Krstic, P . V . Kokot ovic, and I. Kanel lakopo ulos, Non linear and adaptiv e contr ol design . John W iley & Sons, Inc., 1995. [4] Z. Cai, M. S. de Queiroz, and D. M. Dawson, “ A suffici ently sm ooth project ion operat or , ” IEEE T ransactions on Automatic Contr ol , vol. 51, no. 1, pp. 135–139, 2006. [5] J.-J. E. Slotine and W . Li, Applied Nonlinear Contro l . Engle wood Clif fs, NJ: Prentice-Hall , 1991. [6] R. Ortega, S. Aranovskiy , A . A. Pyrkin, A. Astolfi, and A. A. Bobtso v , “Ne w results on parameter estimati on via dynamic regressor ext ension and mixing: Continuous and discre te-time cases, ” IEEE T ransactions on Automatic Contr ol , vol. 66, no. 5, pp. 2265–2272, 2020. [7] L. Somers, W . M. Haddad, N.-M. T . K okol akis, and K. G. V amv oudakis, “Onl ine accele rated data-dri ven learning for opti mal feedbac k control of discre te-time partial ly uncertain systems, ” Inter- national Journal of Adaptive Contr ol and Signal Proce ssing , vol. 38, no. 3, pp. 848–876, 2024. [8] D. M. Le, O. S. Pati l, C. F . Nino, and W . E. Dixon, “ Accele rated gradien t approach for deep neural network-based adapti ve control of unkno wn nonlinear s ystems, ” IEEE T ransact ions on Neural Networks and Learning Systems , vol. 36, no. 4, pp. 6299–6313, 2024. [9] D. M. Le, M. L. Greene, W . A. Makumi, and W . E . Dixon, “Real- time m odular deep neural network- based adapti ve control of nonlinea r systems, ” IEEE Contr ol Systems Letter s , vol. 6, pp. 476–481, 2021. [10] N. M. Bof fi and J.-J. E. Slotine, “I mplicit reg ulariza tion and mo- mentum algorithms in nonline arly paramete rized adapti ve control and predict ion, ” Neural Computation , vol. 33, no. 3, pp. 590–673, 2021. [11] T . L ee, J. Kwon, and F . C. P ark, “ A na tural adapti ve cont rol la w for robot mani pulators, ” in IEEE/RSJ Interna tional Confere nce on Intell igent Robots and Systems , 2018, pp. 1–9. [12] R. Moghe and M. R. Akell a, “Projection scheme and adapti ve control for symmetric matrice s with eigen value bounds, ” IEEE T ransac tions on Automatic Contr ol , vol. 68, no. 3, pp. 1738–1745, 2022. [13] R. G. Hart, E. J. Griffis, O. S. Patil, and W . E. Dixon, “L yapunov-based physics-inf ormed long short-term memory (LSTM) neural network- based adapti ve control , ” IEEE Contr ol Systems Letter s , vol. 8, pp. 13– 18, 2023. [14] A. P . Dani and S. Bhasin, “ Adaptiv e actor -critic based optimal regula- tion for drift-free nonlinea r systems, ” IE EE Open Journal of Contr ol Systems , vol. 4, pp. 117–129, 2025. [15] A. P . Dani, “Constra ined paramete r update law using in verse barrier functio n for adapti ve control, ” in IEEE Confere nce on Decision and Contr ol , 2025. [16] A. Fradko v , “Speed-gr adient scheme and its applicat ion in adapti ve control problems, ” Automation and Remote Contr ol , vol. 9, pp. 90– 101, 1979. [17] S. Boyd and L. V andenbe rghe, Con vex Optimizatio n . Ca mbridge Uni versit y Press, 2004. [18] G. Chowdha ry , T . Y ucel en, M. Muhlegg, and E. N. Johnson, “Con- current learni ng adapti ve control of linear systems with exponenti ally con vergent bounds, ” International Journa l of Adaptive Contr ol and Signal Pro cessing , vol. 27, no. 4, pp. 280–301, 2013. [19] A. Pari kh, R. Kamalapurkar , and W . E. Dixon, “Inte gral concurrent learni ng: Adapti ve control with pa rameter con ver gence using finite exc itation , ” International Journal of Adaptive Contr ol and Signal Pr ocessing , vol. 33, no. 12, pp. 1775–1787, 2019.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment