제약식 적응 제어를 위한 동등성 매개변수 업데이트 법칙
본 논문은 매개변수 추정에 선형 동등성 제약 \(A\theta = d\) 을 적용한 두 가지 적응 제어 업데이트 법칙을 제시한다. 하나는 전통적인 그라디언트 기반이며, 다른 하나는 동시학습(Concurrent Learning, CL) 기반이다. 제약을 제거하기 위해 매개변수를 새로운 저차원 변수 \(z\) 로 재구성하고, 라그랑주 승수를 사용하지 않는 형태로 최적화 문제를 풀어 업데이트 식을 도출한다. 제시된 법칙들은 Lyapunov 이론을 통…
저자: Ashwin P. Dani
본 논문은 적응 제어에서 매개변수 추정에 선형 동등성 제약 \(A\theta = d\) 을 직접 반영하는 두 가지 업데이트 법칙을 제시한다. 먼저 시스템 모델은 \(\dot x = f(x) + u\) 이며, \(f(x)=Y(x)\theta\) 로 선형 파라미터화된다. 여기서 \(\theta\in\mathbb R^{p}\) 는 미지 파라미터이며, \(A\in\mathbb R^{m\times p}\) 와 \(d\in\mathbb R^{m}\) 는 사전 지식에 의해 정의된 제약 행렬·벡터이다. 예시로는 로봇 관절의 질량이 동일하다는 가정에 의해 \(\theta_i-\theta_j=0\) 과 같은 제약이 있다.
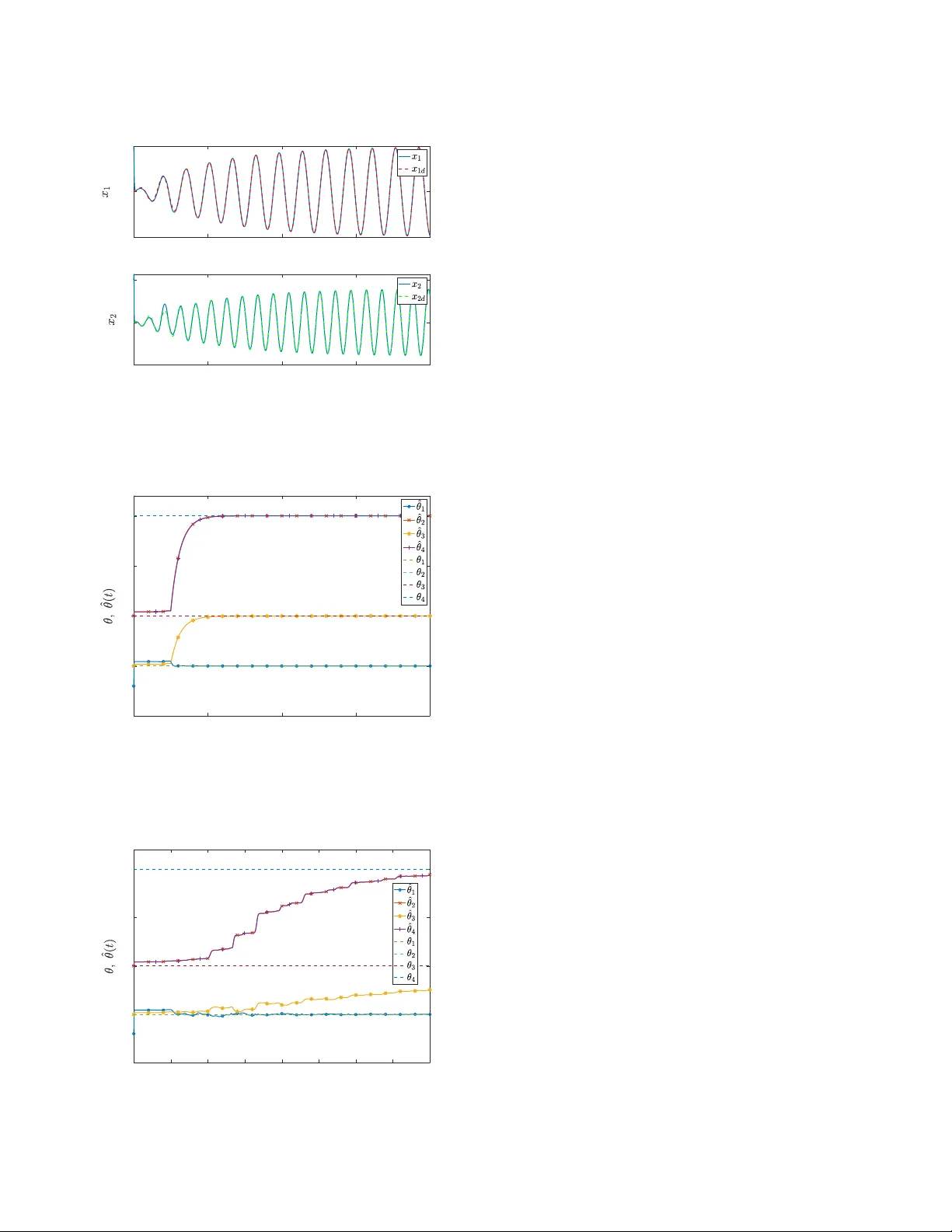
제어 목표는 원하는 궤적 \(x_d(t)\) 를 추적하면서 \(\hat\theta(t)\) 가 제약을 만족하도록 하는 것이다. 이를 위해 전통적인 적응 제어 입력 \(u = \dot x_d - Y\hat\theta - ke\) 를 사용하고, 추적 오차 \(e = x - x_d\) 와 파라미터 오차 \(\tilde\theta = \theta - \hat\theta\) 를 정의한다. 이때 폐루프 오차 동역학은 \(\dot e = -ke + Y\tilde\theta\) 가 된다.
### 1) 제약 제거를 위한 변수 변환
제약 \(A\hat\theta = d\) 를 만족하는 특정 해 \(\hat\theta_0 = A^{T}(AA^{T})^{-1}d\) 와 영공간 기저 \(F\) ( \(R(F)=N(A)\) )를 구한다. 그 후 매개변수를 \(\hat\theta = \hat\theta_0 + Fz\) 와 같이 새로운 변수 \(z\in\mathbb R^{p-m}\) 로 재표현한다. 이렇게 하면 제약이 자동으로 만족되며, 원래의 최적화 문제는 \(z\) 에 대한 무제약 문제로 변환된다.
### 2) 그라디언트 기반 업데이트
목적함수 \(J_g = \gamma e^{T}Y\tilde\theta\) 에 대해 \(z\) 의 그라디언트를 취하면 \(\dot z = \gamma F^{T}Y^{T}e\) 가 된다. 따라서 파라미터 업데이트 식은
\
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기