Convergence Properties of the Heterogeneous Deffuant-Weisbuch Model
The Deffuant-Weisbuch (DW) model is a bounded-confidence opinion dynamics model that has attracted much recent interest. Despite its simplicity and appeal, the DW model has proved technically hard to analyze and its most basic convergence properties,…
Authors: Ge Chen, Wei Su, Wenjun Mei
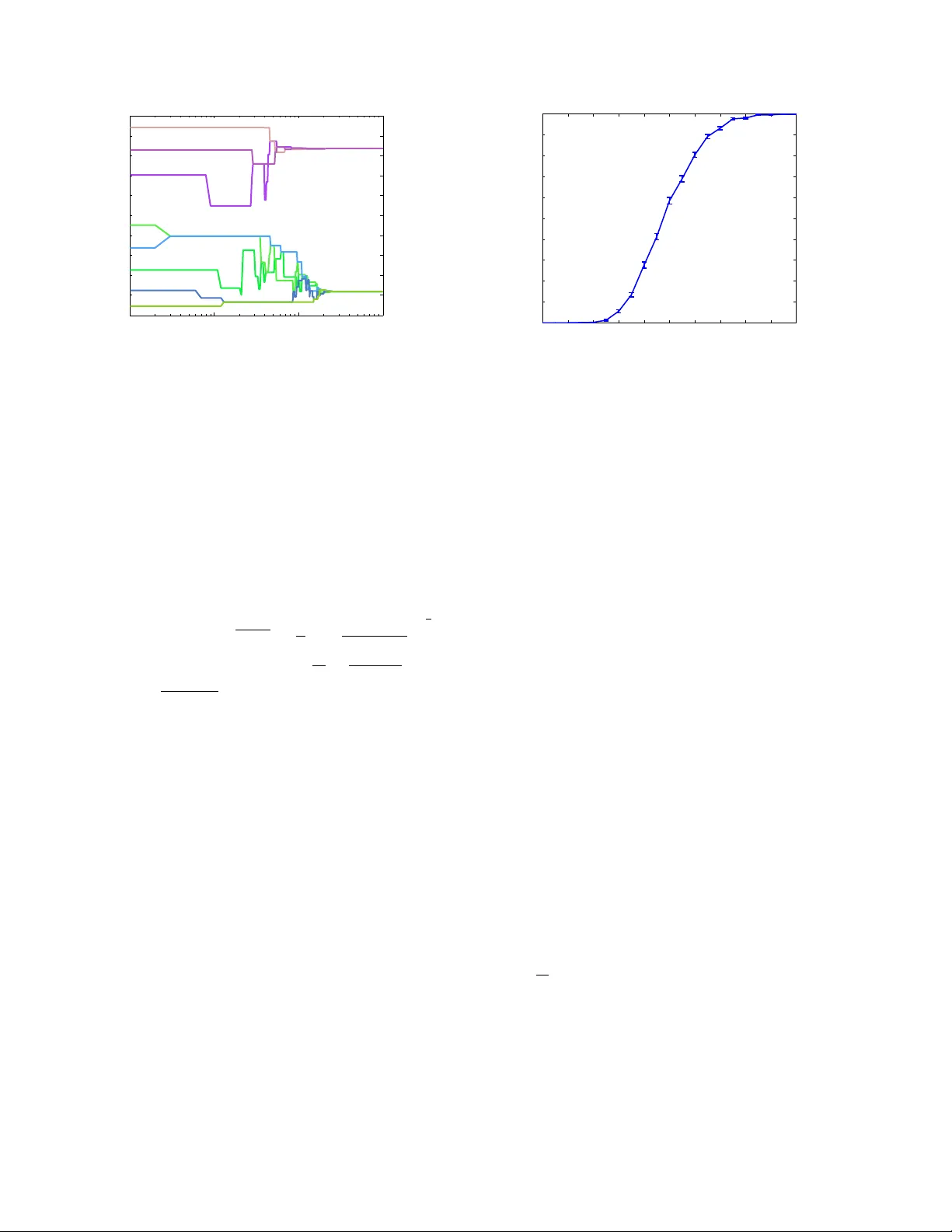
Con v ergence Prop erties of the Heterogeneous Deffuan t-W eisbuc h Mo del ? Ge Chen a , W ei Su b , W enjun Mei c , F rancesco Bullo d , a National Center for Mathematics and Inter disciplinary Scienc es & Key L ab or atory of Systems and Contr ol, Ac ademy of Mathematics and Systems Scienc e, Chinese A c ademy of Scienc es, Beijing 100190, China b Scho ol of Automation and Ele ctric al Engine ering, University of Scienc e and T e chnolo gy Beijing, Beijing 100083, China c Automatic Contr ol L ab or atory, ETH, 8092 Zurich, Switzerland d Dep artment of Me chanic al Engine ering and the Center of Contr ol, Dynamic al-Systems and Computation, University of California at Santa Barb ar a, CA 93106-5070, USA Abstract The Deffuan t-W eisbuc h (D W) model is a b ounded-confidence opinion dynamics model that has attracted m uch recent interest. Despite its simplicit y and app eal, the DW model has prov ed technically hard to analyze and its most basic con vergence prop erties, easy to observe numerically , are only conjectures. This pap er solves the conv ergence problem for the heterogeneous DW model with the weigh ting factor not less than 1 / 2. W e establish that, for an y p ositive confidence bounds and initial v alues, the opinion of each agent will conv erge to a limit v alue almost surely , and the conv ergence rate is exp onential in mean square. Moreo ver, w e show that the limiting opinions of an y tw o agents either are the same or hav e a distance larger than the confidence bounds of the tw o agents. Finally , we provide some sufficient conditions for the heterogeneous DW model to reac h consensus. Key wor ds: Opinion dynamics, consensus, Deffuant mo del, gossip mo del, b ounded confidence mo del 1 In tro duction The field of opinion dynamics studies the dynamical pro- cesses regarding the formation, diffusion, and evolution of public opinion ab out certain even ts and ob ject of in- terest in so cial systems. The study of opinion dynam- ics can b e traced back to the tw o-step communication flo w mo del in ( Katz and Lazarsfeld , 1955 ) and the so- ? This w ork w as supp orted by the National Natural Science F oundation of China under grants 11688101 and 61803024, the National Key Basic Research Program of China (973 program) under grant 2016YFB0800404, and the F undamen- tal Researc h F unds for the Cen tral Universities under grant FRF-TP-17-087A1, and the National Key Researc h and De- v elopmen t Program of Ministry of Science and T echnology of China under grant 2018AAA0101002. Additionally , this material is based up on work supp orted by , or in part by , the U. S. Army Research Lab oratory and the U. S. Army Researc h Office under grant num b ers W911NF-15-1-0577. Email addr esses: chenge@amss.ac.cn (Ge Chen), suwei@amss.ac.cn (W ei Su), meiwenjunbd@gmail.com (W enjun Mei), bullo@ucsb.edu (F rancesco Bullo). cial p ow er and av eraging mo del in ( F rench Jr. , 1956 ). The model by F rench Jr. ( 1956 ) was then elab orated b y Harary ( 1959 ) and rediscov ered by DeGro ot ( 1974 ). Other notable developmen ts include the mo del by F ried- kin and Johnsen ( 1990 ) with attac hment to initial opin- ions, a general influence netw ork theory ( F riedkin , 1998 ), so cial impact theory ( Latan´ e , 1981 ), and dynamic so cial impact theory ( Latan´ e , 1996 ). A comprehensive review of opinion dynamics mo dels is given in the tw o tutori- als Proskurniko v and T emp o ( 2017 , 2018 ) and the text- b o ok Bullo ( 2019 ). In recent years, significant attention has fo cused on so- called b ounde d c onfidenc e (BC) mo dels of opinion dy- namics. In these mo dels one individual is willing to ac- cord influence to another only if their pair-wise opin- ion difference is b elow a threshold (i.e., the confidence b ound). ( Deffuant et al. , 2000 ) prop ose their now well- kno wn BC mo del called the Deffuant-W eisbuch (DW) mo del or Deffuant mo del. In this mo del a pair of individ- uals is selected randomly at each discrete time step and eac h individual up dates its opinion if the other individ- Preprin t submitted to Automatica 20 December 2024 ual’s opinion lies within its confidence b ound. A second w ell-kno wn BC mo del is the Hegselmann-Krause (HK) mo del ( Hegselmann and Krause , 2002 ), where all indi- viduals up date their opinions synchronously by av erag- ing the opinions of individuals within their confidence b ounds. As rep orted in ( Lorenz , 2007 , 2010 ), sim ulation results for the D W model hav e revealed n umerous interesting phenomena suc h as consensus, p olarization and frag- men tation. How ev er, the DW mo del is in general hard to analyze due to the nonlinear state-dep endent in ter-agent top ology . Current analysis results fo cus on the homoge- neous case in which all the agents hav e the same confi- dence bound. The con vergence of the homogeneous D W mo del has b een prov ed in ( Lorenz , 2005 ) and its con- v ergence rate is established in ( Zhang and Chen , 2015 ). Some research has considered also modified D W mo dels. F or example, ( Como and F agnani , 2011 ) consider a gen- eralized DW model with an in teraction kernel and inv es- tigate its scaling limits when the n umber of agen ts grows to infinity; ( Zhang and Hong , 2013 ) generalize the DW mo del by assuming that eac h agent can choose multiple neigh b ors to exchange opinion at each time step. Despite all this progress, the analysis of the heterogeneous DW mo del is still incomplete in that its conv ergence prop er- ties are yet to b e established. It is worth remarking that the analysis of the HK model is also similarly restricted to the homogeneous case; the con v ergence of the heterogeneous HK mo del is only con- jectured in our previous work ( MirT abatabaei and Bullo , 2012 ) and has since b een established in ( Chazelle and W ang , 2017 ) only for the sp ecial case that the confidence b ound of eac h agent is either 0 or 1. In general, n umer- ous conjectures remain op en for heterogeneous b ounded- confidence mo dels. This paper establishes the con vergence properties of the heterogeneous DW model with the weigh ting factor is not less than 1 / 2. W e show that, for any p ositive confi- dence b ounds and initial opinions, the opinion of each agen t con v erges almost surely to a limiting v alue, and the con vergence rate is exponential in mean square. Ad- ditionally w e pro v e that the limiting v alues of an y tw o agen ts’ opinions are either identical or hav e a distance larger than the confidence b ounds of the tw o agents. Moreo v er, we show that a sufficient, and in some cases also necessary , condition for almost sure consensus; the in tuitiv e condition is expressed as a function of the largest confidence b ound in the group. The pap er is organized as follows. Section 2 introduces the heterogeneous D W model and our main results. Sec- tion 3 contains the proofs of our results. Finally , Section 4 concludes the pap er. 2 The heterogeneous DW mo del and our main con vergence results This pap er considers the following D W mo del prop osed in ( Deffuant et al. , 2000 ). In a group of n ≥ 3 agents, w e assume each agent i ∈ { 1 , . . . , n } has a real-v alued opinion x i ( t ) ∈ R at each discrete time t ∈ Z ≥ 0 . W e let x ( t ) := ( x 1 ( t ) , . . . , x n ( t )) > assume, without loss of generalit y , that x (0) ∈ [0 , 1] n . W e let r i > 0 denote the c onfidenc e b ound of the agent i and w e assume, without loss of generality , r 1 ≥ r 2 ≥ · · · ≥ r n > 0 . W e let the constant µ ∈ (0 , 1) denote the weigh ting fac- tor. W e let 1 {·} denote the indicator function, i.e., w e let 1 { ω } = 1 if the property ω holds true and 1 { ω } = 0 oth- erwise. At each time t ∈ Z ≥ 0 , a pair { i t , j t } is indep en- den tly and uniformly selected from the set of all pairs N = {{ i, j } | i, j ∈ { 1 , . . . , n } , i < j } . Subsequently , the opinions of the agents i t and j t are updated according to x i t ( t + 1) = x i t ( t ) + µ 1 {| x j t ( t ) − x i t ( t ) |≤ r i t } ( x j t ( t ) − x i t ( t )) , x j t ( t + 1) = x j t ( t ) + µ 1 {| x j t ( t ) − x i t ( t ) |≤ r j t } ( x i t ( t ) − x j t ( t )) , (1) whereas the other agents’ opinions remain unchanged: x k ( t + 1) = x k ( t ) , for k ∈ { 1 , . . . , n } \ { i t , j t } . (2) If r 1 = · · · = r n , the DW mo del is called homogeneous, otherwise heterogeneous. Previous w orks ( Lorenz , 2005 ) show that the homoge- neous DW mo del (1)-(2) alwa ys conv erges to a limit opinion profile. Simulations rep orted in ( Lorenz , 2007 ) sho w that this property holds also for the heterogeneous case; but a pro of for this statement is lacking. Simula- tions in ( Deffuant et al. , 2000 ; W eisbuch et al. , 2002 ) sho w that the parameter µ mainly affects the conv er- gence time and so previous works ( Lorenz , 2007 , 2010 ) simplified the mo del by setting µ = 1 / 2. This pap er con- siders the case when µ ∈ [1 / 2 , 1). Before stating our con v ergence results, we need to define the probabilit y space of the D W mo del. If the initial state x (0) is a deterministic vector, we let Ω = N ∞ b e the sample space, F b e the Borel σ -algebra of Ω, and P b e the probability measure on F . Then the probability space of the D W mo del is written as (Ω , F , P ). It is worth men tioning that ω ∈ Ω refers to a particular path of agen t pairs for opinion up date. If the initial state is a random v ector, w e let Ω = [0 , 1] n × N ∞ b e the sample space and, similarly to the case of deterministic initial state, the probability space is defined by (Ω , F , P ). 2 10 0 10 1 10 2 10 3 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 x 1 ( t ) x 2 ( t ) x 3 ( t ) x 4 ( t ) x 5 ( t ) x 6 ( t ) x 7 ( t ) x 8 ( t ) t Fig. 1. A conv ergent sim ulation of the heterogeneous DW mo del Let k · k denote the ` 2 -norm (Euclidean norm). The main results of this pap er can b e formulated as follows. Theorem 1 (Con vergence and con v ergence rate of heterogeneous D W mo del) Consider the heter o- gene ous DW mo del (1)-(2) with µ ∈ [1 / 2 , 1) . F or any initial state x (0) ∈ [0 , 1] n , (i) ther e exists a r andom ve ctor x ∗ ∈ [0 , 1] n satisfying x ∗ i = x ∗ j or | x ∗ i − x ∗ j | > max { r i , r j } for al l i 6 = j , such that x ( t ) c onver ges to x ∗ almost sur ely (a.s.) as t → ∞ , and (ii) E k x ( t ) − x ∗ k 2 ≤ nc b t 2( T +1) c + n 4 1 − 8 µ (1 − µ ) n ( n − 1) b t 2 c with T := ( n − 1) 2 (1 + d log 1 − µ r n r 1 e ) d 1 − r n (1 − µ ) 2 r n e and c := 1 − 2 T n T ( n − 1) T . The pro of of Theorem 1 is p ostp oned to Section 3. Fig. 1 displa ys the sim ulation results for a het- erogeneous D W model (1)-(2) with µ = 1 / 2 and n = 8, while the agen ts’ confidence b ounds equal to 0 . 5 , 0 . 41 , 0 . 35 , 0 . 24 , 0 . 175 , 0 . 165 , 0 . 12 , 0 . 047 resp ectively . Consisten tly with Theorem 1, Fig. 1 shows that the in- dividual opinions con verge to tw o distinct limit v alues and that the distance b et w een the tw o v alues is larger than r 1 = 0 . 5. Theorem 1 leads to t wo corollaries on conv ergence to consensus. By consensus we mean that all agents’ opin- ions conv erge to the same v alue. Corollary 2 (Almost sure consensus for large confidence b ound) Consider the heter o gene ous DW mo del (1)-(2) with µ ∈ [1 / 2 , 1) . If the lar gest c onfidenc e b ound r 1 is not less than 1 , then for any initial state x (0) ∈ [0 , 1] n the system r e aches c onsensus a.s. Corollary 3 (Almost sure consensus if and only if large confidence b ound) Consider the heter o gene ous D W mo del (1)-(2) with µ ∈ [1 / 2 , 1) . Assume that the 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 Maxi mal confidenc e b ound C on sensu s prob abilit y Fig. 2. The estimated consensus probabilit y with resp ect to the maximal confidence bound r max , where the error bars denote the standard deviations of the estimated probabilit y of reaching consensus at the p oints of r max . initial state x (0) is r andomly distribute d in [0 , 1] n and that its joint pr ob ability density has a lower b ound ρ min > 0 , that is, for any r e al numb ers a i , b i , i ∈ { 1 , . . . , n } , with 0 ≤ a i < b i ≤ 1 , P n \ i =1 { x i (0) ∈ [ a i , b i ] } ≥ ρ min n Y i =1 ( b i − a i ) . (3) Then the heter o gene ous D W mo del r e aches c onsensus al- most sur ely if and only if the lar gest c onfidenc e b ound r 1 ≥ 1 . Remark 4 Condition (3) c an b e satisfie d if { x i (0) } n i =1 ar e mutual ly indep endent and have p ositive pr ob ability densities over [0 , 1] . Examples include indep endent uni- form, or indep endent trunc ate d Gauss distributions. On the other hand, c ondition (3) c annot b e satisfie d if ther e exists x i (0) which has zer o pr ob ability density in a subin- terval of [0 , 1] with p ositive me asur e, e.g., if x i (0) is a discr ete r andom variable. Corollary 3 provides a sufficient and necessary condi- tion for almos t sure consensus when the initial opinions are randomly distributed. How ever, for settings when al- most sure consensus is not guaranteed, the probability of achieving consensus is unknown. In the remainder of this section, w e provide simulation results for the con- sensus probability of the heterogeneous DW model. Let µ = 1 / 2 and n = 10. Supp ose that agent 1 has a max- imal confidence b ound r max whose v alue is chosen ov er the set { i 20 : i = 1 , 2 , . . . , 20 } . W e approximate the con- sensus probabilit y via the Mon te Carlo method. W e run 1000 samples for each v alue of r max . In each sample, we assume the initial opinions are indep enden tly and uni- formly distributed on [0 , 1], while the confidence b ounds of agen ts 2 , 3 , . . . , 10 are indep enden tly and uniformly distributed on [0 , r max ]. Fig. 2 sho ws the estimated con- sensus probability of the heterogeneous DW mo del (1)- (2) as a function of the maximal confidence b ound r max . 3 3 Pro of of con vergence results The pro of of Theorem 1 requires multiple steps. W e adopt the metho d of “transforming the analysis of a sto c hastic system into the design of con trol algorithms” first prop osed b y ( Chen , 2017 ). This metho d requires the construction of a new system called as DW-c ontr ol sys- tem to help with the analysis of the D W mo del. The fol- lo wing Lemma 5 gives the connection b et ween the DW mo del and DW-con trol system. Also, we introduce a new concept called maximal-c onfidenc e cluster whose basic prop erties will b e provided in the following Lemmas 6- 7. In the following Lemmas 8 and 10, we design con trol algorithms on DW-con trol system around the maximal- confidence cluster. The pro of of Theorem 1 follo ws from these lemmas. 3.1 DW-c ontr ol system and c onne ction to DW mo del Consider the D W proto col (1)-(2) where, at each time t , the pair { i t , j t } is not selected randomly but instead treated as a control input. In other words, assume that { i t , j t } is chosen from the set N arbitrarily as a control signal. W e call such a con trol system the D W-c ontr ol system . Giv en S ⊆ R n , we say S is r e ache d at time t if x ( t ) ∈ S and is r e ache d in the time interval [ t 1 , t 2 ] if there exists t ∈ [ t 1 , t 2 ] such that x ( t ) ∈ S . The following lemma builds a connection b etw een the D W mo del and DW-con trol system. Lemma 5 (Connection betw een D W mo del and D W-control system) L et S ⊆ [0 , 1] n b e a set of states. Assume ther e exists a dur ation t ∗ > 0 such that for any x (0) ∈ [0 , 1] n , we c an find a se quenc e of p airs { i 0 0 , j 0 0 } , { i 0 1 , j 0 1 } , . . . , { i 0 t ∗ − 1 , j 0 t ∗ − 1 } for opinion up date which guar ante es S is r e ache d in the time interval [0 , t ∗ ] . L et a := 1 − 2 t ∗ n t ∗ ( n − 1) t ∗ . Then, under the DW pr ot o c ol, for any initial state x (0) ∈ [0 , 1] n we have P ( τ ≥ t ) ≤ a b t/ ( t ∗ +1) c , ∀ t ≥ 1 , wher e τ := min { t 0 : x ( t 0 ) ∈ S } is the time when S is firstly r e ache d. PR OOF. First according to the rule of the DW proto col (1)-(2) w e get x ( t ) ∈ [0 , 1] n for all t ≥ 0. Also, for any x ( t ) ∈ [0 , 1] n , by the assump- tion of this lemma we can find a sequence of pairs { i 0 t , j 0 t } , { i 0 t +1 , j 0 t +1 } , . . . , { i 0 t + t ∗ − 1 , j 0 t + t ∗ − 1 } for opinion up date such that S is reac hed in [ t, t + t ∗ ] under the D W-con trol system. Thus, under the DW proto col, for an y t ≥ 0 and x ( t ) ∈ [0 , 1] n w e hav e P ( { S is reached in [ t, t + t ∗ ] } | x ( t )) ≥ P t + t ∗ − 1 \ s = t { i s , j s } = { i 0 s , j 0 s } | x ( t ) = t + t ∗ − 1 Y s = t P { i s , j s } = { i 0 s , j 0 s } = 1 |N | t ∗ = 2 t ∗ n t ∗ ( n − 1) t ∗ , (4) where the first and second equalities use the fact that { i t , j t } is uniformly and indep endently selected from the set N , and |N | denotes the cardinality of the set N . Set E t to be the ev ent that S is reac hed in [ t, t + t ∗ ], and let E c t b e the complement set of E t . F or any integer M > 0 and x (0) ∈ [0 , 1] n , Bay es’ Theorem and equation (4) imply P { S is not reached in [0 , ( t ∗ + 1) M − 1] } | x (0) = P M − 1 \ m =0 E c m ( t ∗ +1) x (0) = P ( E c 0 | x (0)) M − 1 Y m =1 P E c m ( t ∗ +1) x (0) , \ 0 ≤ m 0 0 and x (0) ∈ [0 , 1] n , by (5) w e ha ve P τ ≥ ( t ∗ + 1) M | x (0) = P { S is not reached in [0 , ( t ∗ + 1) M − 1] } | x (0) ≤ a M , and, in turn, P ( τ ≥ t | x (0)) ≤ P τ ≥ j t T k T | x (0) ≤ a b t/ ( t ∗ +1) c . According to Lemma 5, to prov e the conv ergence of the D W model, we only need to design control algorithms for DW-con trol system such that a conv ergence set is reac hed. Before the design of suc h con trol algorithms we in tro duce some useful notions. 3.2 Maximal-c onfidenc e clusters and pr op erties Recall that we assume r 1 ≥ r 2 ≥ · · · ≥ r n > 0. F or an y opinion state x = ( x 1 , . . . , x n ) ∈ [0 , 1] n , let C 1 ( x ) ⊆ 4 { 1 , . . . , n } b e the set of the agents that can connect to agen t 1 directly or indirectly with the confidence bound r 1 , i.e., i ∈ C 1 ( x ) if and only if | x i − x 1 | ≤ r 1 or there exists some agents 1 0 , 2 0 , . . . , k 0 ∈ { 1 , . . . , n } suc h that | x i − x 1 0 | ≤ r 1 , | x 1 0 − x 2 0 | ≤ r 1 , . . . , | x k 0 − x 1 | ≤ r 1 . F rom this definition we hav e 1 ∈ C 1 ( x ). Set e C 1 ( x ) := { 1 , . . . , n } \ C 1 ( x ). If e C 1 ( x ) is not empty , w e let i 2 := min i ∈ e C 1 ( x ) i and define C 2 ( x ) ⊆ e C 1 ( x ) to b e the set of the agen ts that can connect to agent i 2 directly or indirectly with the confidence b ound r i 2 . Set e C 2 ( x ) := { 1 , . . . , n } \ ( C 1 ( x ) ∪ C 2 ( x )). If e C 2 ( x ) is not empty , we let i 3 := min i ∈ e C 2 ( x ) i and define C 3 ( x ) ⊆ e C 2 ( x ) to b e the set of the agents that can connect to agent i 3 di- rectly or indirectly with the confidence b ound r i 3 . Re- p eat this pro cess until there exists an integer K suc h that e C K ( x ) = ∅ . W e call the sets C 1 ( x ) , C 2 ( x ) , . . . , C K ( x ) maximal-c onfidenc e (MC) clusters . Note that MC clus- ters are quite different from connected comp onents in graph theory . T o illustrate the definition of MC clusters w e giv e an example, visualized Fig. 3: Assume that n = 7 and that the agents are lab eled by 1 , 2 , . . . , 7. W e supp ose r 1 ≥ r 2 ≥ · · · ≥ r 7 . With the confidence b ound r 1 the agen t 1 can connect to agen ts 5 and 7, and the agen t 7 can connect to agen t 3; ho wev er agent 3 cannot connect to agent 2. Thus, the first MC cluster C 1 ( x ) is { 1 , 3 , 5 , 7 } . The remaining agen ts are 2 , 4 , and 6. With the confi- dence r 2 the agen t 2 can connect to agen t 4, and the agen t 4 can connect to agen t 6, so the second MC cluster C 2 ( x ) is { 2 , 4 , 6 } . The following lemma can b e derived immediately from the definition of MC cluster. Lemma 6 (Distance b et ween maximal-confidence clusters) F or any opinion state x ∈ [0 , 1] n and two differ ent MC clusters C i ( x ) and C j ( x ) , let r ij max := max k ∈ C i ( x ) ∪ C j ( x ) r k b e the maximal c onfidenc e b ound of al l agents in C i ( x ) and C j ( x ) . Then, the opinion values of agents in C i ( x ) ar e al l r ij max bigger or smal ler than those in C j ( x ) , i.e., x k − x l > r ij max ∀ k ∈ C i ( x ) , l ∈ C j ( x ) , or x l − x k > r ij max ∀ k ∈ C i ( x ) , l ∈ C j ( x ) . Under the DW proto col (1)-(2), the MC clusters hav e the conv ex prop erty as follows. Lemma 7 (Con vexit y of maximal-confidence clusters) Consider the DW pr oto c ol (1)-(2) with arbi- tr ary initial state and up date p airs {{ i t , j t }} t ≥ 0 . F or any t ≥ 0 and any MC cluster C i ( x ( t )) , the opinion values 1 2 3 4 5 6 7 r 1 r 1 r 1 r 2 r 2 C 1 ( x ) C 2 ( x ) Fig. 3. Two MC clusters C 1 ( x ) and C 2 ( x ). The distance b et w een tw o adjacent no des in C 1 ( x ) (or C 2 ( x )) is not bigger than the r 1 (or r 2 ), but the distance betw een the agents 3 and 2 is bigger than r 1 . of al l agents in C i ( x ( t )) wil l always stay in the interval [ x i min ( t ) , x i max ( t )] at the time s ≥ t , i.e., x i min ( t ) ≤ x j ( s ) ≤ x i max ( t ) , ∀ j ∈ C i ( x ( t )) , s ≥ t, wher e x i min ( t ) := min k ∈ C i ( x ( t )) x k ( t ) and x i max ( t ) := max k ∈ C i ( x ( t )) x k ( t ) denote the minimal and maximal opinion values of al l agents in C i ( x ( t )) r esp e ctively. PR OOF. Assume that at time t all MC clusters are C 1 = C 1 ( x ( t )) , C 2 = C 2 ( x ( t )) , . . . , C K = C K ( x ( t )). By Lemma 6 we can order these clusters as C j 1 ≺ C j 2 ≺ · · · ≺ C j K , and get, for 1 ≤ k ≤ K − 1, min l ∈ C j k +1 x l ( t ) − max l ∈ C j k x l ( t ) > r k,k +1 , (6) where C i ≺ C j means that at time t the opinion v alues of the agen ts in C i are all less than those in C j , and r k,k +1 := max l ∈ C j k ∪ C j k +1 r l . By the DW proto col (1)-(2), if the up date pair { i t , j t } b elongs to different MC clusters then from (6) we hav e x i t ( t + 1) = x i t ( t ) and x j t ( t + 1) = x j t ( t ); if { i t , j t } b elongs to a same MC cluster C j k then x i t ( t + 1) and x j t ( t + 1) will stay in the interv al [ x j k min ( t ) , x j k max ( t )]. Thus, for 1 ≤ k ≤ K − 1, min l ∈ C j k +1 x l ( t + 1) − max l ∈ C j k x l ( t + 1) > r k,k +1 . Rep eating this pro cess yields our result. With the definition and prop erties of MC clusters we can design control algorithms and complete final pro of of our results in the following subsection. 3.3 Design of c ontr ol algorithms Throughout this subsection we assume µ ∈ [1 / 2 , 1) and r 1 ≥ r 2 ≥ · · · ≥ r n > 0 . W e first design control algo- rithms to split a MC cluster into different MC clusters, or reduce its diameter b y a certain v alue in finite time. 5 Lemma 8 L et t ≥ 0 and x ( t ) ∈ [0 , 1] n b e arbitr arily given. L et C i ( x ( t )) b e an arbitr ary MC cluster, in which the agents’ maximal and minimal c onfidenc e b ounds ar e r i max and r i min r esp e ctively. Assume max M ,m ∈ C i ( x ( t )) [ x M ( t ) − x m ( t )] > r i min . (7) Then, under the DW-c ontr ol system, ther e is a se quenc e of agent p airs { i 0 t , j 0 t } , { i 0 t +1 , j 0 t +1 } , . . . , { i 0 t + t ∗ − 1 , j 0 t + t ∗ − 1 } with t ∗ ≤ ( | C i ( x ( t )) | − 1) 2 1 + d log 1 − µ r i min /r i max e for opinion up date, such that one of the fol lowing two r esults holds: (i) the agents in C i ( x ( t )) split into differ ent MC clus- ters at time t + t ∗ ; and (ii) we have max M ,m ∈ C i ( x ( t )) [ x M ( t + t ∗ ) − x m ( t + t ∗ )] ≤ max M ,m ∈ C i ( x ( t )) [ x M ( t ) − x m ( t )] − (1 − µ ) 2 r i min . The pro of of Lemma 8 is quite complicated. W e put it in App endix A. Remark 9 The r esult in L emma 8 c annot b e extende d to the c ase when µ < 1 / 2 . F or example, assume n = 3 , ( r 1 , r 2 , r 3 ) = (0 . 4 , 0 . 3 , 0 . 2) , and ( x 1 (0) , x 2 (0) , x 3 (0)) = (0 . 1 − ε, 0 . 1 + ε, 0 . 5) , wher e ε ∈ (0 , 0 . 2(1 − µ ) 2 ) is a smal l c onstant. Then, the thr e e agents form a MC cluster, however the inter action exists only b etwe en agents 1 and 2 . Be c ause lim t →∞ " 1 − µ µ µ 1 − µ # t = " 0 . 5 0 . 5 0 . 5 0 . 5 # , we know x 1 ( t ) ↑ 0 . 1 , x 2 ( t ) ↓ 0 . 1 as t → ∞ if we always cho ose { 1 , 2 } as the opinion up date p air. In fact, we c an- not find a finite se quenc e of opinion up date p airs such that either r esult (i) or r esult (ii) in L emma 8 holds. F or any opinion state x ∈ [0 , 1] n and any MC cluster C i ( x ), w e say that C i ( x ) is a c omplete cluster if an y agen t in C i ( x ) can interact with others with the minimal confidence b ound of C i ( x ), i.e., max j,k ∈ C i ( x ) | x j − x k | ≤ min j ∈ C i ( x ) r j . Lemma 8 leads to control algorithms such that all MC clusters b ecome complete clusters in finite time. Lemma 10 Consider the DW-c ontr ol system. Then for any initial state, ther e exists a se quenc e of agent p airs { i 0 0 , j 0 0 } , { i 0 1 , j 0 1 } , . . . , { i 0 T − 1 , j 0 T − 1 } with T ≤ ( n − 1) 2 1 + log 1 − µ r n r 1 1 − r n (1 − µ ) 2 r n for opinion up date such that al l MC clusters ar e c omplete clusters at time T . PR OOF. Assume that at time t all agents are divided in to K t MC clusters lab eled as C 1 ( x ( t )), . . . , C K t ( x ( t )). Define f i ( t ) := ( 0 , if C i ( x ( t )) is a complete cluster , max M ,m ∈ C i ( x ( t )) [ x M ( t ) − x m ( t )] , otherwise , and F ( t ) := P K t i =1 f i ( t ). By Lemma 6 w e ha ve F ( t ) ∈ { 0 } ∪ ( r n , 1], and all MC clusters are complete clus- ters at time t if and only if F ( t ) = 0. If F ( t ) > 0, b y Lemmas 6 and 8 there is a sequence of agent pairs { i 0 t , j 0 t } , { i 0 t +1 , j 0 t +1 } , . . . , { i 0 t + t ∗ − 1 , j 0 t + t ∗ − 1 } with t ∗ ≤ ( n − 1) 2 1 + d log 1 − µ r n /r 1 e for opinion up date, suc h that F ( t + t ∗ ) ≤ F ( t ) − (1 − µ ) 2 r n . With this pro cess repeated, we can find a sequence of agen t pairs { i 0 0 , j 0 0 } , { i 0 1 , j 0 1 } , . . . , { i 0 T − 1 , j 0 T − 1 } with T ≤ ( n − 1) 2 1 + log 1 − µ r n r 1 1 − r n (1 − µ ) 2 r n for opinion up date, such that F ( T ) = 0. 3.4 Final pr o ofs Pro of of Theorem 1 The proof of conv ergence rate partly uses the idea app earing in Section I I.B of ( Bo yd et al. , 2006 ). Let τ b e the first time when all MC clusters are complete clusters under the DW proto col (1)-(2). By Lemmas 10 and 5, P ( τ ≥ t ) ≤ c b t/ ( T +1) c , ∀ t ≥ 1 . (8) Then P ( τ < ∞ ) = 1. Lab el the MC clusters as C 1 , . . . , C K at time τ . By Lemmas 6 and 7, for t ≥ τ all MC clusters C 1 , . . . , C K remain unchanged, i.e., if no de i belongs to a cluster C j at time τ then it will alwa ys b elong to C j for t > τ . 6 Next, we consider the dynamics when t ≥ τ . Define the matrix P ( t ) ∈ [0 , 1] n × n b y ( P ii ( t ) , P j j ( t ) , P ij ( t ) , P j i ( t )) := (1 − µ, 1 − µ, µ, µ ) , if { i, j } is the opinion up date pair at time t and b elongs the same MC cluster, (1 , 1 , 0 , 0) , otherwise. (9) for all i < j . Then P ( t ) is a symmetric stochastic ma- trix. By the proto col (1)-(2), and the facts that all MC clusters are complete clusters, and tw o agen ts in differ- en t MC clusters hav e no interaction, we can get x ( t + 1) = P ( t ) x ( t ) , ∀ t ≥ τ . Also, b ecause C 1 , . . . , C K remain unc hanged, there ex- ists a p erm utation matrix Q ∈ { 0 , 1 } n × n suc h that Q > P ( t ) Q = diag ( W 1 ( t ) , . . . , W K ( t )) := W ( t ) , (10) where W k ( t ) is a | C k | × | C k | matrix corresp onding to the MC cluster C k . F or z ( t ) := Q > x ( t ), we hav e z ( t + 1) = Q > x ( t + 1) = Q > P ( t ) x ( t ) = Q > P ( t ) Qz ( t ) = W ( t ) z ( t ) = W ( t ) · · · W ( τ ) z ( τ ) = diag W 1 ( t ) · · · W 1 ( τ ) , . . . , W K ( t ) · · · W K ( τ ) z ( τ ) . (11) Set J 0 := 0 and J k := | C 1 | + | C 2 | + · · · + | C k | for 1 ≤ k ≤ K . Let ~ z k ( t ) := ( z J k − 1 +1 ( t ) , z J k − 1 +2 ( t ) . . . , z J k ( t )) > . By (11), for 1 ≤ k ≤ K we hav e ~ z k ( t + 1) = W k ( t ) ~ z k ( t ) = W k ( t ) · · · W k ( τ ) ~ z k ( τ ) . (12) Let z k ( t ) := 1 > | C k | ~ z k ( t ) | C k | 1 | C k | b e the av erage vector of ~ z k ( t ), where 1 | C k | = (1 , . . . , 1) > is a | C k |− dimensional column v ector. By (9) and (10) we know W k ( t ) is a symmetric sto c hastic matrix so that z k ( t + 1) = [ 1 > | C k | W k ( t )] ~ z k ( t ) | C k | 1 | C k | = 1 > | C k | ~ z k ( t ) | C k | 1 | C k | = z k ( t ) = · · · = z k ( τ ) . (13) Set ~ y k ( t ) := ~ z k ( t ) − z k ( t ). W e note that if | C k | = 1 then ~ y k ( t ) = 0. Th us, w e only need to consider the case when | C k | ≥ 2. By (12) and (13) we hav e ~ y k ( t + 1) = ~ z k ( t + 1) − z k ( t + 1) = W k ( t )( ~ z k ( t ) − z k ( t )) = W k ( t ) ~ y k ( t ) . Therefore, we can write E k ~ y k ( t + 1) k 2 | ~ y k ( t ) = ~ y > k ( t ) E W 2 k ( t ) ~ y k ( t ) . (14) Because an agen t pair for opinion up date is selected uni- formly and indep enden tly from N at each time, by (9) w e hav e E W 2 k ( t ) ij = | C k | X l =1 E [ W k ( t )] il [ W k ( t )] lj = E ([ W k ( t )] ii [ W k ( t )] ij + [ W k ( t )] ij [ W k ( t )] j j ) = P ([ W k ( t )] ij > 0) [(1 − µ ) µ + µ (1 − µ )] = 4 µ (1 − µ ) n ( n − 1) , ∀ i 6 = j, and then E W 2 k ( t ) ii = 1 − 4 µ (1 − µ )( | C k | − 1) n ( n − 1) . Let 1 = λ 1 ≥ λ 2 ≥ · · · ≥ λ | C k | b e the eigenv alues of E W 2 k ( t ), while ξ 1 , . . . , ξ | C k | b e the corresp onding unit right eigen- v ectors. It can b e computed that λ 2 = · · · = λ | C k | = 1 − | C k | 4 µ (1 − µ ) n ( n − 1) . Also, ξ 1 = 1 | C k | √ | C k | ⊥ ~ y k ( t ), and ξ i ⊥ ξ j for i 6 = j , we ha ve ~ y > k ( t ) E W 2 k ( t ) ~ y k ( t ) = n X l =2 ( ξ > l ~ y k ( t )) ξ l ! > n X l =2 ( ξ > l ~ y k ( t )) λ l ξ l ! = 1 − | C k | 4 µ (1 − µ ) n ( n − 1) ~ y > k ( t ) ~ y k ( t ) . Com bining this with (14) we hav e E k ~ y k ( t + 1) k 2 = 1 − | C k | 4 µ (1 − µ ) n ( n − 1) E k ~ y k ( t ) k 2 . (15) Using (15) rep eatedly we can get E " K X k =1 k ~ y k ( t ) k 2 | t ≥ τ , C 1 , . . . , C K # = E X 1 ≤ k ≤ K, | C k |≥ 2 1 − | C k | 4 µ (1 − µ ) n ( n − 1) t − τ × k ~ y k ( τ ) k 2 t ≥ τ , C 1 , . . . , C K ≤ n 4 1 − 8 µ (1 − µ ) n ( n − 1) t − τ , (16) 7 where the inequality uses the P op o viciu inequality ( P op o viciu , 1935 ) whic h says for an y real n umbers b 1 , . . . , b m w e hav e 1 m m X l =1 b l − b 1 + · · · + b m m 2 ≤ 1 4 max l b l − min l b l 2 . Let x ∗ := Q ( z 1 > ( τ ) , . . . , z K > ( τ )) > . Since z ( t ) is a rear- rangemen t of entries of x ( t ), by (8), (16) and the total probabilit y formula we hav e E k x ( t ) − x ∗ k 2 = P τ > t 2 E k x ( t ) − x ∗ k 2 τ > t 2 + P τ ≤ t 2 E k x ( t ) − x ∗ k 2 τ ≤ t 2 ≤ nc b t 2( T +1) c + n 4 1 − 8 µ (1 − µ ) n ( n − 1) b t 2 c . (17) F or an y constant ε > 0, b y (17) and the Marko v’s in- equalit y we can get ∞ X t =1 P ( k x ( t ) − x ∗ k > ε ) ≤ ∞ X t =1 E k x ( t ) − x ∗ k 2 ε 2 < ∞ , then by the Borel-Cantelli lemma w e ha ve a.s. x ( t ) → x ∗ as t → ∞ . By Lemma 6 and the definition of x ∗ w e obtain x ∗ i = x ∗ j or | x ∗ i − x ∗ j | > max { r i , r j } for any i 6 = j . Pro of of Corollary 2 By Theorem 1 we ha ve x ( t ) a.s. con v erges to a limit p oint x ∗ ∈ [0 , 1] n whic h satisfies either | x ∗ 1 − x ∗ i | = 0 or | x ∗ 1 − x ∗ i | > r 1 for all 2 ≤ i ≤ n . Because r 1 ≥ 1, w e hav e | x ∗ 1 − x ∗ i | = 0 for all 2 ≤ i ≤ n , whic h indicates x ∗ is a consensus state. Pro of of Corollary 3 If r 1 ≥ 1, then Corollary 2 im- plies that the system reac hes consensus a.s. If r 1 < 1, then equation (3) implies P x 1 (0) ∈ h 0 , 1 − r 1 3 i , n \ i =2 n x i (0) ∈ h 2 + r 1 3 , 1 io ≥ ρ min 1 − r 1 3 n . Also, if x 1 (0) ∈ [0 , 1 − r 1 3 ] and the even t T n i =2 { x i (0) ∈ [ 2+ r 1 3 , 1] } tak es place, then | x 1 (0) − x i (0) | = 1+2 r 1 3 > r 1 for 2 ≤ i ≤ n . In turn, this implies that the system cannot reac h consensus b ecause the agent 1 can never in teract with the agents 2 , . . . , n . 4 Conclusions Bounded confidence (BC) mo dels of opinion dynamics adopt a mec hanism whereby individuals are not will- ing to accept other opinions if these other opinions are b ey ond a certain confidence b ound. These mo dels hav e attracted significant mathematical and so ciological at- ten tion in recent years. One well-kno wn BC mo del is the Deffuant-W eisbuc h (DW) mo del, in which a pair of agents is selected randomly at each time step, and eac h agen t in the pair up dates its opinion if the other agen t’s opinion in the pair is within its confidence b ound. Because the inter-agen t top ology of the DW mo del is coupled with the agents’ states, the heterogeneous DW mo del is hard to analyze. This pap er pro ves the con- v ergence of a heterogeneous DW mo del and shows the mean-square error is bounded b y a negativ e exponential function of time. As directions for future researc h, it remains to prov e the con v ergence of the heterogeneous D W mo del with the w eigh ting factor µ ∈ (0 , 1 / 2). F rom Remark 9, the con- v ergence for the case µ ∈ (0 , 1 / 2) cannot b e deduced di- rectly by the current metho d. A more ingenious control design may b e required to establish that the DW-con trol system con v erges to a set with inv ariant top ology in fi- nite time. Ac knowledgemen ts The authors thank Professors Jiangb o Zhang and Yiguang Hong for their kind advice and candid clarifi- cation ab out previous works. References S. Bo yd, A. Ghosh, B. Prabhak ar, and D. Shah. Randomized gossip algorithms. IEEE T r ansac- tions on Information The ory , 52(6):2508–2530, 2006. doi: 10.1109/TIT.2006.874516 . F. Bullo. L e ctur es on Network Systems . Kindle Di- rect Publishing, 1.3 edition, July 2019. ISBN 978- 1986425643. URL http://motion.me.ucsb.edu/ book- lns . With con tributions by J. Cort ´ es, F. D¨ orfler, and S. Mart ´ ınez. B. Chazelle and C. W ang. Inertial Hegselmann-Krause systems. IEEE T r ansactions on Automatic Contr ol , 62 (8):3905–3913, 2017. doi: 10.1109/T AC.2016.2644266 . G. Chen. Small noise ma y diversify collec- tiv e motion in Vicsek mo del. IEEE T r ansac- tions on Automatic Contr ol , 62(2):636–651, 2017. doi: 10.1109/T A C.2016.2560144 . G. Como and F. F agnani. Scaling limits for contin- uous opinion dynamics systems. Annals of Applie d Pr ob ability , 21(4):1537–1567, 2011. doi: 10.1214/10- AAP739 . 8 G. Deffuant, D. Neau, F. Amblard, and G. W eis- buc h. Mixing b eliefs among interacting agents. A dvanc es in Complex Systems , 3(1/4):87–98, 2000. doi: 10.1142/S0219525900000078 . M. H. DeGro ot. Reaching a consensus. Journal of the A meric an Statistic al Asso ciation , 69(345):118– 121, 1974. doi: 10.1080/01621459.1974.10480137 . J. R. P . F rench Jr. A formal theory of so cial p o w er. Psycholo gic al R eview , 63(3):181–194, 1956. doi: 10.1037/h0046123 . N. E. F riedkin. A Structur al The ory of So cial In- fluenc e . Cambridge Universit y Press, 1998. ISBN 9780521454827. N. E. F riedkin and E. C. Johnsen. So cial influence and opinions. Journal of Mathematic al So ciolo gy , 15(3-4): 193–206, 1990. doi: 10.1080/0022250X.1990.9990069 . F. Harary . A criterion for unanimity in French’s theory of so cial p ow er. In D. Cartwrigh t, editor, Studies in So cial Power , pages 168–182. Univ ersit y of Michigan, 1959. ISBN 0879442301. URL http://psycnet.apa. org/psycinfo/1960- 06701- 006 . R. Hegselmann and U. Krause. Opinion dynamics and b ounded confidence models, analysis, and simulations. Journal of A rtificial So cieties and So cial Simulation , 5(3), 2002. URL http://jasss.soc.surrey.ac.uk/ 5/3/2.html . E. Katz and P . F. Lazarsfeld. Personal Influenc e: The Part Playe d by Pe ople in the Flow of Mass Communi- c ations . F ree Press, 1955. ISBN 9781412805070. B. Latan´ e. The psychology of so cial impact. Americ an Psycholo gist , 36(4):343–365, 1981. doi: 10.1037/0003- 066X.36.4.343 . B. Latan ´ e. Dynamic so cial impact: The creation of culture b y communication. Journal of Com- munic ation , 46(4):13–25, 1996. doi: 10.1111/j.1460- 2466.1996.tb01501.x . J. Lorenz. A stabilization theorem for dynamics of con tin uous opinions. Physic a A: Statistic al Me- chanics and its Applic ations , 355(1):217–223, 2005. doi: 10.1016/j.ph ysa.2005.02.086 . J. Lorenz. Contin uous opinion dynamics under b ounded confidence: A surv ey . International Jour- nal of Mo dern Physics C , 18(12):1819–1838, 2007. doi: 10.1142/S0129183107011789 . J. Lorenz. Heterogeneous b ounds of confidence: Meet, discuss and find consensus! Complexity , 4(15):43–52, 2010. doi: 10.1002/cplx.20295 . A. MirT abatabaei and F. Bullo. Opinion dynamics in heterogeneous netw orks: Conv ergence conjectures and theorems. SIAM Journal on Contr ol and Optimiza- tion , 50(5):2763–2785, 2012. doi: 10.1137/11082751X . T. Popoviciu. Sur les equations algebriques a y an t toutes leurs racines reelles. Mathematic a , 9:129–145, 1935. A. V. Proskurniko v and R. T emp o. A tutorial on mo deling and analysis of dynamic so cial netw orks. P art I. A nnual R eviews in Contr ol , 43:65–79, 2017. doi: 10.1016/j.arcon trol.2017.03.002 . A. V. Proskurniko v and R. T emp o. A tutorial on mo d- eling and analysis of dynamic so cial netw orks. Part I I. Annual R eviews in Contr ol , 45:166–190, 2018. doi: 10.1016/j.arcon trol.2018.03.005 . G. W eisbuc h, G. Deffuant, F. Am blard, and J. P . Nadal. Meet, discuss, and segregate! Complexity , 7(3):55–63, 2002. doi: 10.1002/cplx.10031 . J. Zhang and G. Chen. Con vergence rate of the asym- metric Deffuant-W eisbuch dynamics. Journal of Sys- tems Scienc e and Complexity , 28(4):773–787, 2015. doi: 10.1007/s11424-015-3240-z . J. Zhang and Y. Hong. Opinion evolution anal- ysis for short-range and long-range Deffuant- W eisbuc h mo dels. Physic a A: Statistic al Me chan- ics and its Applic ations , 392(21):5289–5297, 2013. doi: 10.1016/j.ph ysa.2013.07.014 . A The proof of Lemma 8 The pro of of this lemma is identical for all cases t = 0 , 1 , 2 , . . . . T o simplify the exp osition we consider only the case when t = 0. Assume the agents j and k hav e the minimal and maxi- mal opinions among C i ( x (0)) at time 0 respectively , i.e., x j (0) = min m ∈ C i ( x (0)) x m (0) , x k (0) = max m ∈ C i ( x (0)) x m (0) . Also, assume that the agen t l has the maximal confidence b ound r i max in C i ( x (0)). W e first consider the case when x l (0) ≥ x k (0)+ x j (0) 2 . F rom (7) we hav e x l (0) ≥ x j (0) + r i min / 2 . (A.1) Let A ( s ) := { m ∈ C i ( x (0)) : x m ( s ) < x j (0) + (1 − µ ) 2 r i min } . W e aim to control the agent l to episo dically come and pull out one more agen t from A ( s ), or otherwise w e hav e a split of clusters. The con trol strategy can b e divided in to the following steps: Step 1: Control the agent pairs for opinion up date until one of the following tw o even ts happ ens: ( E1 ) The agents in C i ( x (0)) split into differen t MC clus- ters; ( E2 ) | A ( s ) | = | A (0) | − 1, where | · | denote the cardinal- it y of a set. Let i 0 0 b e the agent in C i ( x (0)) which has the smallest opinion within the confidence b ound of agent l at time 0, i.e., i 0 0 = arg min m ∈ C i ( x (0)) { x m (0) : | x l (0) − x m (0) | ≤ r l } . 9 j i 0 ’ l k r l A (0 ) C i ( x (0 ) ) Fig. A.1. An example for the relation of C i ( x (0)), A (0), and agen ts j , k , l , and i 0 0 . An example for the relation of C i ( x (0)), A (0), and agen ts j , k , l , and i 0 0 is shown in Fig. A.1. Set T 1 := max (& log 1 − µ r i 0 0 x l (0) − x i 0 0 (0) ' , 0 ) . W e can get T 1 ≤ d log 1 − µ r n e is uniformly b ounded. Cho ose { i 0 0 , l } as the agen t pair for opinion update at times 0 , 1 , . . . , T 1 . If T 1 = 0, w e ha ve x l (0) − x i 0 0 (0) ≤ r i 0 0 , then by the proto col (1)-(2) and the fact of µ ∈ [1 / 2 , 1) w e get x l (1) = (1 − µ ) x l (0) + µx i 0 0 (0) ≤ (1 − µ ) x i 0 0 (0) + µx l (0) = x i 0 0 (1) (A.2) If T 1 ≥ 1, b y the definition of T 1 w e hav e T 1 − 1 < log 1 − µ r i 0 0 x l (0) − x i 0 0 (0) ≤ T 1 ⇐ ⇒ (1 − µ ) − T 1 +1 r i 0 0 < x l (0) − x i 0 0 (0) ≤ (1 − µ ) − T 1 r i 0 0 . (A.3) Using (A.3) and the proto col (1)-(2) rep eatedly we ob- tain ( x i 0 0 ( s ) = x i 0 0 (0) x l ( s ) = x i 0 0 (0) + (1 − µ ) s ( x l (0) − x i 0 0 (0)) for s = 1 , . . . , T 1 , and ( x i 0 0 ( T 1 + 1) = x i 0 0 (0) + µ (1 − µ ) T 1 ( x l (0) − x i 0 0 (0)) x l ( T 1 + 1) = x i 0 0 (0) + (1 − µ ) T 1 +1 ( x l (0) − x i 0 0 (0)) . (A.4) W e con tinue our discussion b y considering the follo wing t w o ca ses: Case I : i 0 0 ∈ A (0). By (A.2), (A.3), and (A.4) we get x i 0 0 ( T 1 + 1) ≥ x l ( T 1 + 1) = x i 0 0 (0) + (1 − µ ) T 1 +1 ( x l (0) − x i 0 0 (0)) > x i 0 0 (0) + (1 − µ ) 2 r i 0 0 ≥ x j (0) + (1 − µ ) 2 r i min . (A.5) Because all agents except l and i 0 0 k eep their opinions in v arian t during the time [0 , T 1 + 1], by (A.5) we hav e | A ( T 1 + 1) | = | A (0) | − 1 . (A.6) Case II : i 0 0 6∈ A (0). By (A.2) and (A.4) we get x l ( T 1 + 1) ≤ x i 0 0 ( T 1 + 1) < x l (0) . (A.7) Let L l ( s ) denote the set of the agen ts in C i ( x (0)) whose opinions at time s are less than x l ( s ), i.e., L l ( s ) := { m ∈ C i ( x (0)) : x m ( s ) < x l ( s ) } . By (A.7) we hav e |L l ( T 1 + 1) | ≤ |L l (0) | − 1 . (A.8) Let i 0 1 b e the agent in C i ( x (0)) which has the smallest opinion within the confidence b ound of agent l at time T 1 + 1, i.e., i 0 1 = arg min m ∈ C i ( x (0)) { x m ( T 1 + 1) : | x l ( T 1 + 1) − x m ( T 1 + 1) | ≤ r l } . If x i 0 1 ( T 1 + 1) = x l ( T 1 + 1), the agents in C i ( x (0)) split in to different MC clusters; otherwise, let T 2 := T 1 + 1 + max (& log 1 − µ r i 0 1 x l ( T 1 + 1) − x i 0 1 ( T 1 + 1) ' , 0 ) , and c ho ose { i 0 1 , l } as the agent pair for opinion up date at times T 1 + 1 , T 1 + 2 , . . . , T 2 . If i 0 1 ∈ A (0), similar to case I we get | A ( T 2 + 1) | = | A (0) | − 1. If i 0 1 6∈ A (0), similar to (A.8) w e ha ve |L l ( T 2 + 1) | ≤ |L l ( T 1 + 1) | − 1 . (A.9) Rep eat the ab o v e pro cess until the agents in C i ( x (0)) split in to different MC clusters, or | A ( T p +1) | = | A (0) |− 1 for some p ositiv e integer p . By (A.8)-(A.9) we get that p ≤ |L l (0) | − | A (0) | + 1 ≤ | C i ( x (0)) | − | A (0) | . F rom this inequalit y and the definition of T 1 , T 2 , . . . we ha v e T p + 1 ≤ ( | C i ( x (0)) | − | A (0) | ) 1 + d log 1 − µ r i min /r i max e . (A.10) 10 Let t 1 b e the minimal time suc h that E1 or E2 happens. By (A.6) and (A.10) w e ha ve t 1 ≤ ( | C i ( x (0)) | − | A (0) | ) 1 + d log 1 − µ r i min /r i max e . (A.11) If E1 happ ens at time t 1 , our result i) holds; otherwise, w e need to carry out the following Step 2. Step 2: F or s ≥ t 1 w e control the agent l mov es tow ard the right until E1 or one of the following tw o ev en ts happ ens: ( E3 ) x l ( s ) ≥ x j (0) + r i min / 2; ( E4 ) max m ∈ C i ( x (0)) x m ( s ) ≤ x k (0) − (1 − µ ) 2 r i min ; F or s ≥ t 1 , let i 0 s b e the agent in C i ( x (0)) which has the biggest opinion within the confidence b ound of agen t l at time s , i.e., i 0 s = arg max m ∈ C i ( x (0)) { x m ( s ) : | x l ( s ) − x m ( s ) | ≤ r l } . Cho ose { i 0 s , l } as the agent pair for opinion update, un til at least one of the even ts E1, E3, and E4 happ ens. Let t 2 b e the minimal time that E1, E3, or E4 happ ens. F or s ∈ [ t 1 , t 2 ), since E1 and E4 do not happ en at time s , x l ( s + 1) = (1 − µ ) x l ( s ) + µx i 0 s ( s ) > x l ( s ) . By the similar metho d as Step 1, eac h agen t in C i ( x (0)) \ ( A ( t 1 ) ∪ { l } ) can b e c hosen at most 1 + d log 1 − µ r i min /r i max e times for opinion update during [ t 1 , t 2 ). Then, t 2 − t 1 ≤ ( | C i ( x (0)) | − | A ( t 1 ) | − 1) 1 + d log 1 − µ r i min /r i max e = ( | C i ( x (0)) | − | A (0) | ) 1 + d log 1 − µ r i min /r i max e . (A.12) If E4 happ ens, Lemma 7 implies max M ,m ∈ C i ( x (0)) [ x M ( t 2 ) − x m ( t 2 )] ≤ max M ∈ C i ( x (0)) x M ( t 2 ) − x j (0) ≤ x k (0) − x j (0) − (1 − µ ) 2 r i min , whic h indicates our result ii) holds; if E1 happ ens, our result i) holds at time t 2 ; otherwise, we need to carry out next Step. ... ... Step 2 m + 1: F or s ≥ t 2 m , we use the similar control metho d as Step 1. Let t 2 m +1 b e the minimal time suc h that E1 happ ens or | A ( t 2 m +1 ) | = | A ( t 2 m − 1 ) | − 1. Similar to (A.11) we hav e t 2 m +1 − t 2 m (A.13) ≤ ( | C i ( x (0)) | − | A ( t 2 m − 1 ) | ) 1 + d log 1 − µ r i min /r i max e = ( | C i ( x (0)) | − | A (0) | + m ) 1 + d log 1 − µ r i min /r i max e . Step 2 m + 2: F or s ≥ t 2 m +1 , we use the similar control metho d as Step 2. Let t 2 m +2 b e the minimal time suc h that E1, E3, or E4 happ ens. Similar to (A.12) we hav e t 2 m +2 − t 2 m +1 (A.14) ≤ ( | C i ( x (0)) | − | A ( t 2 m +1 ) | − 1) 1 + d log 1 − µ r i min /r i max e = ( | C i ( x (0)) | − | A (0) | + m ) 1 + d log 1 − µ r i min /r i max e . The ab ov e pro cess will end at Step 2 | A (0) | − 1 b ecause A ( t 2 | A (0) |− 1 ) = ∅ . By Lemma 7 and the definition of A ( s ) we hav e max M ,m ∈ C i ( x (0)) [ x M ( t 2 | A (0) |− 1 ) − x m ( t 2 | A (0) |− 1 )] ≤ x k (0) − min m ∈ C i ( x (0)) x m ( t 2 | A (0) |− 1 ) ≤ x k (0) − x j (0) − (1 − µ ) 2 r i min , (A.15) whic h indicates our result ii) holds when t ∗ = t 2 | A (0) |− 1 . Set t 0 := 0. By (A.14) and (A.15) we hav e t 2 | A (0) |− 1 = | A (0) |− 2 X m =0 ( t 2 m +2 − t 2 m ) + t 2 | A (0) |− 1 − t 2 | A (0) |− 2 ≤ | A (0) |− 2 X m =0 2 ( | C i ( x (0)) | − | A (0) | + m ) + | C i ( x (0)) | − 1 1 + d log 1 − µ r i min /r i max e = (2 | A (0) | − 1) | C i ( x (0)) | + ( −| A (0) | − 1) | A (0) | + 1 × 1 + d log 1 − µ r i min /r i max e ≤ ( | C i ( x (0)) | − 1) 2 1 + d log 1 − µ r i min /r i max e , where the last inequality uses the fact that | A (0) | ≤ | C i ( x (0)) | − 1. F or the case when x l (0) < [ x k (0) + x j (0)] / 2, we can set ¯ A ( s ) := { m ∈ C i ( x (0)) : x m ( s ) > x k (0) − (1 − µ ) 2 r i min } , and use the similar method as the case x l (0) ≥ [ x k (0) + x j (0)] / 2 to control ¯ A ( s ) b ecomes empty . 11
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment