On the Analysis of the DeGroot-Friedkin Model with Dynamic Relative Interaction Matrices
This paper analyses the DeGroot-Friedkin model for evolution of the individuals' social powers in a social network when the network topology varies dynamically (described by dynamic relative interaction matrices). The DeGroot-Friedkin model describes…
Authors: Mengbin Ye, Ji Liu, Brian David Outram Anderson
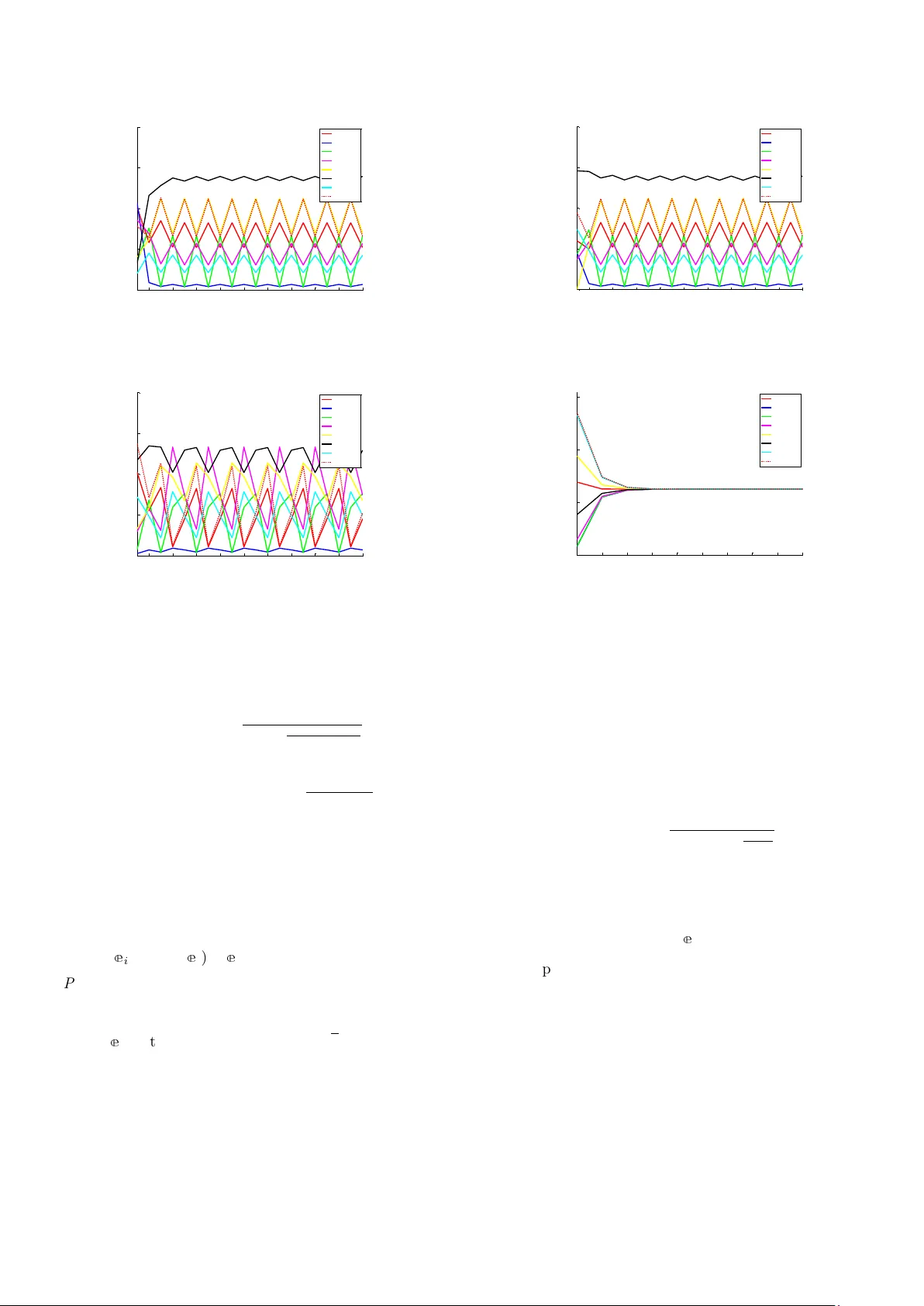
On the Analysis of the DeGro ot-F riedkin Mo del with Dynamic Relativ e In teraction Matrices ? Mengbin Y e ∗ , Ji Liu ∗∗ , Brian D.O. Anderson ∗ , ∗∗∗ , ∗∗∗∗ , Changbin Y u ∗ , ∗∗∗ , and T amer Ba ¸ sar ∗∗ ∗ R ese ar ch Scho ol of Engine ering, Austr alian National University, Canb err a, A.C.T. 2601, Austr alia ∗∗ University of Il linois at Urb ana-Champ aign, USA ∗∗∗ Hangzhou Dianzi University, Hangzhou, Zhejiang, China ∗∗∗∗ Data61-CSIR O (formerly NICT A Ltd.) E-mail: { mengbin.ye, brian.anderson, br ad.yu } @anu.e du.au, { jiliu, b asar1 } @il linois.e du Abstract: This pap er analyses the DeGro ot-F riedkin model for evolution of the individuals’ so cial p o w ers in a social netw ork when the netw ork topology v aries dynamically (describ ed by dynamic relativ e in teraction matrices). The DeGro ot-F riedkin mo del describ es ho w individual so cial p o wer (self-appraisal, self-weigh t) ev olv es as a netw ork of individuals discuss a sequence of issues. W e seek to study dynamically changing relativ e interactions b ecause interactions may c hange dep ending on the issue being discussed. In order to explore the problem in detail, tw o differen t cases of issue-dependent net work top ologies are studied. First, if the topology v aries b et w een issues in a perio dic manner, it is shown that the individuals’ self-appraisals admit a p eriodic solution. Second, if the top ology c hanges arbitrarily , under the assumption that eac h relativ e in teraction matrix is doubly stochastic and irreducible, the individuals’ self-appraisals asymptotically conv erge to a unique non-trivial equilibrium. Keywor ds: so cial and b eha vioural sciences, m ulti-agent systems, so cial netw orks, netw orked systems, opinion dynamics 1. INTR ODUCTION In the past decade and a half, the systems and control comm unity has conducted extensiv e research in to m ulti- agen t systems. A m ulti-agent system comprises of m ultiple in teracting agents. Problems such as formation con trol, distributed optimisation, consensus based co ordination and rob otics hav e b een heavily studied, see (Cao et al., 2013; Knorn et al., 2015) for t wo ov erviews. On the other hand, the control comm unity has recently turned to study m ulti-agent systems in so cial sciences. Sp ecifically , a so cial net w ork consisting of groups of p eople in teracting with their acquain tances can b e considered from one p oin t of view as a multi-agen t system. The emergence of so cial media platforms such as F aceb ook, Instagram and Twitter has only increased the relev ance of research into so cial netw orks. A problem of particular interest is “opinion dynamics”, whic h studies how opinions within a so cial netw ork ma y ev olve as individuals discuss an issue, e.g. religion or ? This w ork was supported by the Australian Research Council (ARC) under the ARC gran ts DP-130103610 and DP-160104500, b y the National Natural Science F oundation of China (grant 61375072), and by Data61-CSIRO (formerly NICT A). The work of Liu and Ba¸ sar was supported in part by AF OSR MURI Grant F A 9550-10- 1-0573, and in part by NSF under grant CCF 11-11342. p olitics. The classical DeGroot model (DeGro ot, 1974) is closely related to the consensus pro cess (Jadbabaie et al., 2003; Shi and Johansson, 2013). Other mo dels include the F riedkin-Johnsen mo del (F riedkin and Johnsen, 1990), the Altafini mo del (Altafini, 2013; Altafini and Lini, 2015), and Hegselmann-Krause mo del (Hegselmann and Krause, 2002; Etesami and Ba¸ sar, 2015). The DeGro ot-F riedkin mo del proposed and analysed in (Jia et al., 2015) is a tw o- stage model for multi-issue discussions, where issues are discussed sequentially . F or each issue, the DeGro ot mo del is used to study the opinion dynamics; eac h individual up dates its own opinion based on a con vex combination of its opinion and those of its neigh b ours. The co efficients of the con vex combination are determined by 1) the indi- vidual’s self-weigh t (whic h represents self-appraisal, self- confidence) and 2) the weigh ts assigned b y the individual to its neighbours (which might b e a measure of trust or friendship). A t the b eginning of eac h new issue, a reflected appraisal mechanism is used by eac h individual to up date its o wn self-weigh t. This mechanism takes into account the individual’s influence and impact on the discussion of opinions on the prior issue. F rom one p erspective, an indi- vidual’s self-weigh t is a represen tation of that individual’s so cial p o wer in the so cial netw ork. The k ey contribution of this paper is the study of the DeGroot-F riedkin mo del with time-v arying interac- tions among the individuals. Because interactions in the DeGro ot-F riedkin mo del are mo delled by a matrix termed the “ r elative inter action matrix ”, we will b e inv estigating relativ e interaction matrices which dynamic al ly change b et w een issues but remain constant during each issue. In particular, we will in vestigate t wo t yp es of time-v arying in- teractions as to b e explained shortly . As an extension of the DeGro ot-F riedkin mo del, a modified v ersion was prop osed and analysed in (Xu et al., 2015; Chen et al., 2015). Time- v arying interactions on this modified DeGro ot-F riedkin mo del w as studied in (Xia et al., 2016). On the other hand, there hav e been no results studying time-v arying in terac- tions for the original DeGro ot-F riedkin mo del prop osed in (Jia et al., 2015) (which assumed a constant relativ e in teraction matrix during each discussion and b et ween all issues). The first type of time-v arying in teraction to consider is issue-dep endent in teractions that change p erio dically . F or example, consider a go vernmen t cabinet that meets regularly to discuss several different issues, e.g. defence, finance, and so cial security . Because different ministers will ha ve differen t p ortfolios and specialisations, it is lik ely that the w eights assigned b y an individual to its neigh- b ours (used in the opinion dynamics comp onent of the DeGro ot-F riedkin model) will change dep ending on the issue. P erio dically changing interactions may o ccur if a group meets regularly to discuss the same set of issues, e.g. the ab o v e example of the gov ernment cabinet. Initially , w e consider the situation where the so cial net work switches p eriodically betw een t wo different interaction top ologies. W e show that the self-weigh t of each individual in the so- cial net work has a p erio dic solution where each individual alw ays has strictly p ositive self-weigh t that is less than one. This result is then generalised to multiple p eriodically switc hing interaction top ologies. As a second t yp e of time v ariation, we consider the case where the issues v ary arbitrarily as opposed to p eriodically . Accordingly , the relative interaction matrices also v ary arbitrarily . F urthermore, in order to simplify the analysis, w e assume that the arbitrarily v arying relative interaction matrices are doubly stochastic and irreducible for each issue. Such arbitrarily changing interactions may o ccur in curren t day online so cial net works. W e show that, given the assumption of doubly sto c hastic and irreducible rela- tiv e interaction matrices, the self-w eigh t of eac h individual con verges asymptotically to 1 /n where n is the num b er of individuals in the netw ork. In other w ords, a democratic sharing of so cial pow er is achiev ed. This result is consistent with (Jia et al., 2015) whic h studied a single, constan t relativ e interaction matrix for the netw ork ov er all issues. The remainder of the pap er is organised as follo ws. Sec- tion 2 provides mathematical notation and in tro duces the DeGro ot-F riedkin mo del. Section 3 considers in teractions whic h c hange p eriodically with issues. Interactions whic h v ary randomly b et ween issues is studied in Section 4. Sim ulations are presented in Section 5 and we conclude the pap er with the concluding remarks of Section 6. 2. BA CKGR OUND AND PROBLEM ST A TEMENT W e b egin by in tro ducing some mathematical notations used in the pap er. Let 1 n and 0 n denote, respectively , the n × 1 column vectors of all ones and all zeros. F or a v ector x ∈ R n , 0 x and 0 ≺ x indicate comp onen t- wise inequalities, i.e., for all i ∈ { 1 , 2 , . . . , n } , 0 ≤ x i and 0 < x i , respectively . Let ∆ n denote the n -simplex, the set which satisfies { x ∈ R n : 0 x , 1 > n x = 1 } . The canonical basis of R n is giv en by e 1 , . . . , e n . Define e ∆ n = ∆ n \{ e 1 , . . . , e n } and int(∆ n ) = { x ∈ R n : 0 ≺ x , 1 > n x = 1 } . F or the rest of the paper, w e shall use the terms “no de”, “agent”, and “individual” interc hangeably . W e shall also interc hangeably use the words “self-weigh t” and “individual so cial p o wer”. An n × n matrix is called a r ow-sto chastic matrix if its en tries are all nonnegative and its ro w sums all equal 1. An n × n matrix is called a doubly sto chastic matrix if its en tries are all nonnegativ e and its row and column sums all equal 1. 2.1 Gr aph The ory The in teraction b et ween agents in a social netw ork is mo delled using a weigh ted directed graph, denoted as G = ( V , E ). Eac h individual agen t is a node in the finite, nonempt y set of no des V = { v 1 , . . . , v n } . The set of ordered edges is E ⊆ V × V . W e denote an ordered edge as e ij = ( v i , v j ) ∈ E , and b ecause the graph is directed, in general the assumption e ij = e j i do es not hold. An edge e ij is outgoing with respect to v i and incoming with respect to v j . The presence of an edge e ij connotes that individual j ’s opinion is influenced by the opinion of individual i (the precise nature of the influence will b e made clear in the sequel). The incoming and outgoing neighbour set of v i are respectively defined as N + i = { v j ∈ V : e j i ∈ E } and N − i = { v j ∈ V : e ij ∈ E } . The relativ e interaction matrix C ∈ R n × n asso ciated with G has nonnegative en tries c ij , termed “relative in terp ersonal w eights” in Jia et al. (2015). The entries of C hav e prop erties suc h that 0 < c ij ≤ 1 ⇔ e j i ∈ E and c ij = 0 otherwise. It is assumed that c ii = 0 (i.e. with no self-lo ops), and we imp ose the restriction that P j ∈N + i c ij = 1 (i.e. that C is a ro w-sto c hastic matrix). A directed path is a sequence of edges of the form ( v p 1 , v p 2 ) , ( v p 2 , v p 3 ) , . . . where v p i ∈ V , e ij ∈ E . Node i is reac hable from no de j if there exists a directed path from v j to v i . A graph is said to be strongly connected if ev ery no de is reac hable from every other no de. The relativ e in teraction matrix C is irreducible if and only if the as- so ciated graph G is strongly connected. If C is irreducible then it has a unique left eigenv ector c > asso ciated with the eigen v alue 1, with the prop ert y c > 1 n = 1 (P erron- F rob enius Theorem, see (Godsil et al., 2001)). Hence forth, w e shall call this left eigenv ector c > the dominant left eigenve ctor of C . 2.2 Mo del ling the Dynamics of the So cial Network The discrete-time DeGroot-F riedkin mo del is comprised of a consensus mo del and a mec hanism for up dating self- appraisal (the precise meaning of self-appraisal will be made clear in the sequel). W e define S = { 1 , 2 , 3 , . . . } to b e the set of indices of sequential issues which are b eing discussed b y the so cial netw ork. F or a given issue s , the so cial net w ork discusses the issue using the discrete-time DeGro ot consensus model. At the end of the discussion (i.e. when the DeGro ot mo del has e ffectiv ely reached steady state), each individual judges its impact on the discussion (self-appraisal). The individual then updates its o wn self-weigh t and discussion begins on the next issue s + 1. DeGr o ot Consensus of Opinions F or eac h issue s ∈ S , eac h agent updates its opinion y i ( s, · ) ∈ R at the t + 1 th time instant as y i ( s, t + 1) = w ii ( s ) y i ( s, t ) + n X j ∈N + i ,j 6 = i w ij ( s ) y j ( s, t ) (1) where w ii ( s ) is the self-w eight individual i places on its o wn opinion and w ij are the weigh ts given b y agent i to the opinions of its neigh b our individual j . The opinion dynamics for the entire so cial net work ma y b e expressed as y ( s, t + 1) = W ( s ) y ( s, t ) (2) where y ( s, t ) = [ y 1 ( s, t ) · · · y n ( s, t )] > is the vector of opinions of the n + 1 agen ts in the net work at time instant t . This mo del was first prop osed in (DeGro ot, 1974) with S = 1 (i.e. only one issue was discussed). Belo w, we provide the model for the updating of W ( s ) (and sp ecifically w ii ( s ) via a reflected self-appraisal mec hanism). F rie dkin ’s Self-Appr aisal Mo del for Determining Self- Weight The F riedkin component of the model prop oses a metho d for up dating the self-weigh t (self-appraisal, self- confidence or self-esteem) of agen t i , which is denoted b y x i ( s ) = w ii ( s ) ∈ [0 , 1] (the i th diagonal term of W ( s )) (Jia et al., 2015). Define the v ector x ( s ) = [ x 1 ( s ) · · · x n ( s )] > as the vector of self-weigh ts for the social net work, with starting self-w eight x (1) ∈ ∆ n . The influence matrix W ( s ) can b e expressed as W ( s ) = X ( s ) + ( I n − X ( s )) C (3) where C is the relative in teraction matrix asso ciated with the graph G and X ( s ) . = diag [ x ( s )]. F rom the fact that C is row-stochastic with zero diagonal entries, (3) implies that W ( s ) is a ro w-sto c hastic matrix. The self-w eight v ector x ( s ) is up dated at the end of issue s as x ( s + 1) = w ( s ) (4) where w ( s ) is the dominant left eigen vector of W ( s ) with the prop erties such that 1 > n w ( s ) = 1 and w ( s ) 0 (Jia et al., 2015). This implies that x ( s ) ∈ ∆ n for all s . In (Jia et al., 2015), the DeGroot-F riedkin mo del was studied under the assumption that C w as constant for all t and all s . In this pap er, we in vestigate the mo del when C ( s ) v aries betw een issues. W e assume that eac h agen t’s opinion, y i ( s, t ), is a scalar for simplicit y . The results can readily be applied to the scenario where eac h agen t’s opinion state is a v ector y i ∈ R p , p ≥ 2, b y using Kronec ker pro ducts. It is shown in [Lemma 2.2, (Jia et al., 2015)] that the system (4), with C indep endent of s , is equiv alent to x ( s + 1) = F ( x ( s )) (5) where the nonlinear vector-v alued function F ( x ( s )) is defined as F ( x ( s )) = e i if x i ( s ) = e i , for an y i α ( x ( s )) c 1 1 − x 1 ( s ) . . . c n 1 − x n ( s ) otherwise (6) with α ( x ( s )) = 1 / P n i =1 c i 1 − x i ( s ) and where c i is the i th en try of the dominant left eigen vector c > of the relative in teraction matrix C . The or em 1. (Theorem 4.1, (Jia et al., 2015)). F or n ≥ 3, consider the DeGro ot-F riedkin dynamical system (5) with a relativ e interaction matrix C that is ro w-sto c hastic, irreducible, and has zero diagonal entries. Assume that the digraph G asso ciated with C do es not hav e star topology 1 and define c > as the dominant left eigen v ector of C . Then, (i) F or all initial conditions x (1) ∈ e ∆ n , the self-w eights x ( s ) conv erge to x ∗ as s → ∞ . Here, x ∗ ∈ e ∆ n is the unique fixed point satisfying x ∗ = F ( x ∗ ). (ii) There holds x ∗ i < x ∗ j if and only if c i < c j , for any i, j , where c i is the i th en try of the dominan t left eigen vector c . There holds x ∗ i = x ∗ j if and only if c i = c j . (iii) The unique fixed p oin t x ∗ is determined only b y c > , and is independent of the initial conditions. 2.3 Pr oblem F ormulation This pap er studies the DeGro ot-F riedkin mo del under the assumption that C v aries b et ween issues. F or a given s , ho wev er, C is assumed to remain constant for all t . Thus, the relative interactions among the individuals, i.e. C ( s ), ma y c hange betw een issues, but remains constant for all t for a giv en issue. W e will consider alternative situations corresp onding to alternative assumptions. W e lea ve the details of these assumptions to their corresp onding future sections. T o facilitate our analysis, we make the follo wing tw o assumptions which wil l hold in al l pr oblems c onsider e d in this p ap er. Assumption 1. The graph G do es not ha ve star topology , the relative interaction matrix C ( s ) is irreducible and n ≥ 3. Assumption 2. The initial conditions of the DeGro ot- F riedkin mo del dynamics (5) satisfy x (1) ∈ e ∆ n . Note that Assumption 1 requires n ≥ 3, b ecause for n = 2, an y irreducible C ( s ) is doubly sto chastic and corresp onds to a star top ology . Assumption 2 ensures that no individual begins with self-weigh t equal to 1 (auto cratic configuration). 3. PERIODIC SWITCHING In this section, we inv estigate the situation where C ( s ) c hanges p eriodically . In order to simplify the problem, we mak e the following assumption. 1 A graph G is said to ha ve star top ology if there exists a no de i such that every edge of G is either to or from no de i . Assumption 3. The so cial netw ork switc hes b et w een tw o relativ e interaction matrices, C 1 and C 2 , where b oth ma- trices are irreducible, row-stochastic, but not necessarily doubly stochastic. More sp ecifically , the social netw ork switc hes b et ween C 1 and C 2 p eriodically , with p erio d T = 2, as given by C ( s ) = C 1 if s is o dd C 2 if s is even (7) Note that for a constant C , simulations sho w that conv er- gence of x ( s ) to x ∗ t ypically o ccurs after only a few issues (Jia et al., 2015). W e are therefore interested in perio dic switc hing with a short p eriod, b ecause a long p eriod will allo w x ( s ) to reach x ∗ (hence the abov e assumption). 3.1 T r ansformation into a Time-Invariant System Under Assumption 3, the up date of the self-weigh ts o ccurs as x ( s + 1) = F ( x ( s ) , s ), where w e no w ac kno wledge the fact that F ( x ( s ) , s ) is an explicit function of time. More sp ecifically , and in accordance with (6), we hav e x ( s + 1) = F 1 ( x ( s )) if s is o dd F 2 ( x ( s )) if s is even (8) The function F p , for p = 1 , 2, is F p ( x ( s )) = e i if x i ( s ) = e i , for an y i α p ( x ( s )) c 1 ,p 1 − x 1 ( s ) . . . c n,p 1 − x n ( s ) otherwise (9) with α p ( x ( s )) = 1 / P n i =1 c i,p 1 − x i ( s ) . Here c i,p is the i th elemen t of the dominant left eigen vector c p > asso ciated with the relativ e interaction matrix C p . W e now define a new state y ∈ R 2 n as y (2 s ) = y 1 (2 s ) y 2 (2 s ) = x (2 s − 1) x (2 s ) (10) and study the evolution of y (2 s ) for ev ery s ∈ S . Observe that y (2 s + 2) = y 1 (2 s + 2) y 2 (2 s + 2) = x (2 s + 1) x (2 s + 2) (11) By observing that x (2 s + 1) = F 2 ( x (2 s )) and x (2 s + 2) = F 1 ( x (2 s + 1)) for any s , we obtain y (2 s + 2) = F 2 ( x (2 s )) F 1 ( x (2 s + 1)) (12) Similarly , b y noticing that x (2 s ) = F 1 ( x (2 s − 1)) and x (2 s + 1) = F 2 ( x (2 s )) for an y s , we obtain y (2 s + 2) = F 2 F 1 ( x (2 s − 1)) F 1 F 2 ( x (2 s )) (13) = F 2 F 1 ( y 1 (2 s )) F 1 F 2 ( y 2 (2 s )) (14) = F 3 ( y 1 (2 s )) F 4 ( y 2 (2 s )) (15) for the time-inv ariant nonlinear comp osition functions F 3 = F 2 ◦ F 1 and F 4 = F 1 ◦ F 2 . W e can thus express the p erio dic system (8) as the nonlinear time-inv ariant system y (2 s + 2) = ¯ F ( y (2 s )) (16) where ¯ F = [ F > 3 , F > 4 ] > , and seek to study the equilibrium of this system. More sp ecifically , supp ose that y ∗ = [ y ∗ 1 > y ∗ 2 > ] > is an equilibrium of the system (16). In App endix A, w e show F 3 and F 4 are contin uous. It is then straightforw ard to see that if lim k →∞ y ( k ) → y ∗ , then x ( s ) is an asymptotic p eriodic sequence with perio dic sequence x ( s ) = F 3 ( y ∗ 1 ) if s is o dd F 4 ( y ∗ 2 ) if s is ev en (17) Define y i (resp ectiv ely ¯ F i ) as the i th elemen t of the vector y (respectively ¯ F ). F rom the abov e, manipulation allo ws us to obtain, for i = 1 , . . . , n , ¯ F i ( y 1 (2 s )) = α 2 ( F 1 ( y 1 (2 s ))) c i, 2 1 − α 1 ( y 1 (2 s )) c i, 1 1 − y i (2 s ) (18) where α 1 ( y 1 (2 s )) = 1 / P n j =1 c j, 1 1 − y j (2 s ) and α 2 ( F 1 ( y 1 (2 s ))) = 1 P n p =1 c p, 2 1 − α 1 ( y 1 (2 s )) c p, 1 1 − y p (2 s ) (19) 3.2 Existenc e of a Perio dic Se quenc e In this subsection, we establish prop erties of the function ¯ F . More sp ecifically , we detail prop erties of F 3 ( y 1 (2 s )). Because F 3 ( y 1 (2 s )) is similar in form to F 4 ( y 2 (2 s )), we omit the pro of verifying that the same prop erties hold for F 4 ( y 2 (2 s )). L emma 2. The following prop erties of F 3 ( y 1 (2 s )) hold. P1 The quantit y α 2 ( F 1 ( y 1 (2 s ))) > 0 if y 1 (2 s ) ∈ e ∆ n , for an y s . P2 If y 1 (2 s ) = e i for any i , then F 3 ( y 1 (2 s )) = e i . In other w ords, the n vertices of ∆ n are fixed p oin ts of F 3 . P3 The function F 3 ( y 1 (2 s )) : ∆ n → ∆ n is contin uous. P4 There exists at least one fixed p oin t in in t(∆ n ). Pro of. See App endix A. Lemma 2 states that F 3 and F 4 eac h hav e at least one fixed point, whic h we denote by y ∗ 1 and y ∗ 2 resp ectiv ely . W e will leav e the study of whether the fixed p oin ts are unique, and analysis of con vergence to the fixed p oin ts to the journal version of this pap er. W e no w state the follo wing theorem which establishes the p eriodic b eha viour of the system (8). The or em 3. Supp ose that Assumption 3 holds. T1 Supp ose further that for some s 1 ∈ S , there holds x (2 s 1 − 1) = y ∗ 1 , where y ∗ 1 ∈ int(∆ n ) is any fixed p oin t of F 3 . Then, for all s ≥ s 1 , there holds x ( s ) = y ∗ 1 if s is o dd y ∗ 2 if s is ev en (20) where y ∗ 2 ∈ int(∆ n ) is a fixed p oin t of F 4 . T2 Supp ose now that, instead of T1, there holds for some s 1 ∈ S , x (2 s 1 ) = y ∗ 2 , where y ∗ 2 ∈ int(∆ n ) is any fixed p oin t of F 3 . Then, (20) holds for all s 1 ≥ s , with y ∗ 1 ∈ int(∆ n ) b eing a fixed p oin t of F 3 . Pro of. See App endix B Note that the ab ov e result establishes that a p eriodic sequence exists, but conv ergence to this sequence is not established. W e conjecture that F 3 do es in fact hav e a unique fixed p oin t (i.e. a unique p eriodic sequence for x ( s )) and that any y 1 (0) ∈ e ∆ n will con verge to the unique y ∗ 1 . W e conjecture a similar result for F 4 . In Section 5, w e pro vide simulations in supp ort of these conjectures. R emark 4. Theorem 3 leads to an interesting conclusion. Consider that case where, at some p oin t in the ev olution of the system tra jectory , we ha ve x ( s ) = y ∗ 1 or y ∗ 2 (e.g. the self-weigh ts are initialised as x (1) = y ∗ 1 ). Then, the self-w eights will exhibit a p eriodic sequence. F urthermore, for each individual in the net work, that individual’s self- w eight/social p o wer is never zero. R emark 5. Notice that in the Theorem 3, we did not require the fixed p oints of F 3 and F 4 to b e unique. Supp ose that there are t wo distinct fixed p oin ts of F 3 , whic h we lab el y ∗ 1 ,a and y ∗ 1 ,b . The theorem then concludes that if x (2 s ) = y ∗ 1 ,a for some s , then the system (8) will exhibit a p eriodic sequence. If on the other hand x (2 s ) = y ∗ 1 ,b for some s , the system (8) will also exhibit a p eriodic sequence, but differ ent fr om the se quenc e involving y ∗ 1 ,a . 3.3 Gener alisation to M T op olo gies W e now generalise to the case where the social net work switc hes betw een M different top ologies. The follo wing assumption is no w placed on the so cial netw ork instead of Assumption 3. Assumption 4. F or q ∈ Z ≥ 0 , the so cial netw ork switc hes b et w een the M ≥ 3 relativ e in teraction matrices in the follo wing manner C ( M ( s − 1) + p ) = C p (21) for all s ∈ S and any p ∈ { 1 , 2 , . . . , M } . The matrices C p are all irreducible, row-stochastic and in general C i 6 = C j , ∀ i, j ∈ { 1 , 2 , . . . , M } . With the ab o ve Assumption 4, the up date of the self- w eights is given by x ( M ( s − 1) + p + 1) = F p ( x ( M ( s − 1) + p )) (22) for all s ∈ S and an y p ∈ { 1 , 2 , . . . , M } . The function F p is given in (9), but no w for p = 1 , 2 , . . . , M . F ollowing the steps in subsection 3.1, w e now sho w the generalised transformation of the time-v arying system with M differ- en t top ologies to a time-in v ariant nonlinear system. A new state v ariable y ∈ R M n is defined as y ( M s ) = y 1 ( M s ) y 2 ( M s ) . . . y M ( M s ) = x ( M ( s − 1) + 1) x ( M ( s − 1) + 2) . . . x ( M ( s − 1) + M ) (23) and we study the evolution of y ( M s ) for ev ery strictly p ositiv e integer s . It follows that y ( M ( s + 1)) = y 1 ( M ( s + 1)) y 2 ( M ( s + 1)) . . . y M ( M ( s + 1)) = x ( M s + 1) x ( M s + 2) . . . x ( M s + M ) (24) F ollowing the logic in subsection 3.1, but with the precise steps omitte d due to space limitations, we obtain that y ( M ( s + 1)) = F M ( F M − 1 ( . . . ( F 1 ( y 1 ( M s ))))) F 1 ( F M ( . . . ( F 2 ( y 2 ( M s ))))) . . . F M − 1 ( F M − 2 ( . . . ( F M ( y M ( M s ))))) = G 1 ( y 1 ( M s )) G 2 ( y 2 ( M s )) . . . G M ( y M ( M s )) (25) One can observe that eac h G M is a time-inv ariant non- linear function. Due to the complexity of each G i , w e do not repro duce their expressions here, but their forms are similar to the expressions in (18) - (19). The transformed nonlinear system is expressed as y ( M ( s + 1)) = ¯ G ( y ( M s )) (26) The generalisations of Lemma 2 and Theorem 3 are no w giv en b elo w. L emma 6. The follo wing prop erties of ¯ G ( y ( M s )) hold, for an y p ∈ { 1 , 2 , . . . , M } . P1 The quan tity α j > 0 , ∀ j ∈ { 1 , 2 , . . . , M } if y p ( M s ) ∈ e ∆ n , for an y s . P2 If y p ( M s ) = e i for any i , then G p ( y p ( M s )) = e i . In other w ords, the n vertices of ∆ n are fixed p oin ts of G p . P3 The function G p ( y p ( M s )) : ∆ n → ∆ n is contin uous. P4 There exists at least one fixed p oin t for G p in in t(∆ n ). The or em 7. Supp ose that Assumption 4 holds. Supp ose further that for some s 1 , there holds x ( M ( s 1 − 1)+ p ) = y ∗ p , where y ∗ p ∈ in t(∆ n ) is a fixed p oin t of G p . Then, for all s ≥ s 1 there holds x j ( M ( s − 1) + j ) = y ∗ j , for any j ∈ { 1 , 2 , . . . , M } (27) where y ∗ j ∈ in t(∆ n ) is a fixed point of G j , and y ∗ j = y ∗ p for j = p . The proofs for the ab o ve tw o results are omitted due to the similarit y of the pro of methods b et ween Lemma 2 (resp ectiv ely , Theorem 3) and Lemma 6 (resp ectively , Theorem 7). 4. ARBITRAR Y SWITCHING This section considers the scenario where the so cial net- w ork topology c hanges arbitrarily . In other words, the function F ( x ( s ) , s ) in (6) may dep end explicitly on the issue s . Specifically , it is the quantities c i ( s ) that ma y v ary dep ending on the issue discussed. In order to facilitate the analysis, the follo wing assumption is inv oked. Assumption 5. F or all s ∈ { 1 , 2 , . . . } , C ( s ) is doubly sto c hastic and irreducible. The or em 8. Supp ose that Assumption 5 holds. Then, the v ector of self-w eights x ( s ) asymptotically conv erges to the unique equilibrium x ∗ in e ∆ n as s → ∞ , where x ∗ i = 1 /n for each i ∈ { 1 , 2 , . . . , n } . Pro of. Because C ( s ) is irreducible, the dominant nor- malised left eigen vector c ( s ) > is unique. Moreo ver, b ecause C ( s ) is doubly sto chastic, we obtain that c i ( s ) = 1 /n for all i ∈ { 1 , 2 , . . . , n } , whic h implies that c i ( s ) does not dep end on s , and neither does the function F ( x ( s ) , s ) in (6). Th us, the con vergence analysis in (Jia et al., 2015), on the system x ( s + 1) = F ( x ( s )) can b e directly applied here, leading to the conclusion that lim s →∞ x ( s ) = 1 n /n . 5. SIMULA TIONS In this section, simulations are provided which verify the claims of Lemma 2, Lemma 6, Theorem 3 and Theorem 7. The sim ulated so cial net work has 8 individuals, with three p ossible sets of interactions described by three different irreducible relative interaction matrices, whic h we denote as C 1 , C 2 and C 3 . These are omitted due to space limitations. Figure 1 shows the ev olution of the individual so cial p o w er (self-weigh t x i ( s )) ov er a sequence of issues for the p eriodically switching relativ e interaction matrices C 1 and C 2 . The initial condition x ( s = 1) was generated randomly . F or the same t w o relativ e in teraction matrices, Fig. 2 sho ws the evolution for a second randomly generated initial condition x ( s = 1) differen t from the first figure. Figure 3 shows the ev olution of x ( s ) for a so cial netw ork that p erio dically switches b et ween C 1 , C 2 and C 3 . Figures 1 and 2 illustrate that Theorem 3 holds. In other words, x ( s ) has a perio dic solution. Notice from Figures 1 and 2 that even for differen t initial conditions, x ( s ) asymptotically reaches the same perio dic solution. This supp orts our conjecture that ¯ F has a unique fixed p oin t and that the fixed p oin t is attractiv e for all x ( s ) ∈ in t(∆ n ). Our goal is to verify this in the extended version of this pap er. Figure 3 illustrates the results developed in subsection 3.3 on generalising to m ultiple p erio dically switc hing relative interaction matrices. Lastly , Figure 4 simulates the DeGroot-F riedkin mo del for 8 individuals, with C ( s ) arbitrarily changing betw een is- sues. Assumption 5 holds for C ( s ) ∈ { C 4 , C 5 } . Theorem 8 is illustrated since lim s →∞ x ( s ) → 1 n /n . 6. CONCLUSION In this pap er, the DeGro ot-F riedkin mo del w as used to analyse a so cial netw ork under a n umber of assumptions on the dynamically changing netw ork topology , with the net work top ology being describ ed b y relative interaction matrices which v ary b et ween issues being discussed by the so cial net work. In particular, results w ere dev elop ed on the ev olution of an individual’s so cial p o wer (or self-weigh t). If the relative interaction matrices c hanged p eriodically , then an individual’s self-w eight admitted at least one p eri- o dic solution where the individual’s self-w eight w as alwa ys strictly positive, and less than 1. F or arbitrarily v arying relativ e in teraction matrices whic h were irreducible and doubly stochastic, individual so cial p ow er conv erged to a demo cratic configuration. In the perio dic case, future work will focus on studying the uniqueness of the p erio dic solu- tion and obtaining a con vergence prop ert y . F or arbitrarily v arying topologies, future work will focus on relaxing the assumptions on the relativ e interaction matrices. REFERENCES Altafini, C. (2013). Consensus problems on net works with antagonistic in teractions. IEEE T r ansactions on A utomatic Contr ol , 58(4), 935–946. Altafini, C. and Lini, G. (2015). Predictable dynamics of opinion forming for netw orks with antagonistic interac- tions. IEEE T r ansactions on Automatic Contr ol , 60(2), 342–357. Cao, Y., Y u, W., Ren, W., and Chen, G. (2013). An Ov erview of Recen t Progress in the Study of Dis- tributed Multi-Agent Co ordination. IEEE T r ansac- tions on Industrial Informatics , 9(1), 427–438. doi: 10.1109/TI I.2012.2219061. Chen, X., Liu, J., Xu, Z., and Ba ¸ sar, T. (2015). Distributed Ev aluation and Conv ergence of Self-Appraisals in So cial Net works. In 54th IEEE Confer enc e on De cision and Contr ol (CDC), Osaka, Jap an , 2895–2900. DeGro ot, M.H. (1974). Reaching a consensus. Journal of the Americ an Statistic al Asso ciation , 69(345), 118–121. Etesami, S.R. and Ba ¸ sar, T. (2015). Game-theoretic analysis of the Hegselmann-Krause mo del for opinion dynamics in finite dimensions. IEEE T r ans. Autom. Contr ol , 60(7), 1886–1897. F riedkin, N.E. and Johnsen, E.C. (1990). So cial influence and opinions. The Journal of Mathematic al So ciolo gy , 15(3-4), 193–205. Go dsil, C.D., Ro yle, G., and Go dsil, C. (2001). Algebr aic gr aph the ory , volume 207. Springer New Y ork. Hegselmann, R. and Krause, U. (2002). Opinion dy- namics and b ounded confidence mo dels, analysis, and sim ulation. Journal of Artificial So cieties and So cial Simulation , 5(3). Jadbabaie, A., Lin, J., and Morse, A.S. (2003). Co- ordination of Groups of Mobile Autonomous Agents Using Nearest Neigh b or Rules. IEEE T r ansac- tions on Automatic Contr ol , 48(6), 988–1001. doi: 10.1109/T AC.2003.812781. Jia, P ., MirT abatabaei, A., F riedkin, N.E., and Bullo, F. (2015). Opinion Dynamics and the Evolution of Social P ow er in Influence Net works. SIAM R eview , 57(3), 367– 397. Knorn, S., Chen, Z., and Middleton, R. (2015). Overview: Collectiv e control of multi-agen t systems. IEEE T r ans- actions on Contr ol of Network Systems , PP(99), 1–1. doi:10.1109/TCNS.2015.2468991. Shi, G. and Johansson, K.H. (2013). The Role of Persisten t Graphs in the Agreement Seeking of Social Netw orks. IEEE Journal on Sele cte d A r e as in Communic ations , 31(9), 595–606. doi:10.1109/JSAC.2013.SUP .0513052. Xia, W., Liu, J., Johansson, K.H., and Ba ¸ sar, T. (2016). Con vergence Rate of the Mo dified DeGroot-F riedkin Mo del with Doubly Sto c hastic Relativ e Interaction Ma- trices. In Americ an Contr ol Confer enc e (ACC), Boston, USA , 1054–1059. doi:10.1109/ACC.2016.7525054. Xu, Z., Liu, J., and Ba ¸ sar, T. (2015). On a Mo dified DeGro ot-F riedkin Mo del of Opinion Dynamics. In A meric an Contr ol Confer enc e (ACC), Chic ago, USA , 1047–1052. doi:10.1109/ACC.2015.7170871. 2 4 6 8 20 12 14 16 18 20 0 0.1 0.2 0.3 0.4 Self-Weight, x i (s) Issue, s Agent 1 Agent 2 Agent 3 Agent 4 Agent 5 Agent 6 Agent 7 Agent 8 Fig. 1. Ev olution of an individual’s self-weigh t for C 1 and C 2 . 2 4 6 8 10 12 14 16 18 20 0 0.1 0.2 0.3 0.4 Self-Weight, x i (s) Issue, s Agent 1 Agent 2 Agent 3 Agent 4 Agent 5 Agent 6 Agent 7 Agent 8 Fig. 2. Ev olution of an individual’s self-weigh t for C 1 and C 2 , different initial conditions. 2 4 6 8 10 12 14 16 18 20 0 0.1 0.2 0.3 0.4 Self-Weight, x i (s) Issue, s Agent 1 Agent 2 Agent 3 Agent 4 Agent 5 Agent 6 Agent 7 Agent 8 Fig. 3. Evolution of an individual’s self-weigh t for C 1 , C 2 and C 3 . 1 2 3 4 5 6 7 8 9 10 0 0.1 0.2 0.3 Self-Weight, x i (s) Issue, s Agent 1 Agent 2 Agent 3 Agent 4 Agent 5 Agent 6 Agent 7 Agent 8 Fig. 4. Ev olution of an individual’s self-w eight when C ( s ) v aries arbitrarily b et ween C 4 and C 5 . App endix A. PROOF OF LEMMA 2 Pr op erty P1: Firstly , observe that α 2 ( F 1 ( y 1 (2 s ))) = 1 P n p =1 c p, 2 1 − ¯ F i ( y 1 (2 s )) (A.1) and, for i = 1 , . . . , n , we hav e ¯ F i ( y 1 (2 s )) = α 1 ( y 1 (2 s )) c i, 1 1 − y i (2 s ) (A.2) F rom the fact that c p, 1 > 0 and y p (2 s ) < 1 for an y p = 1 , . . . , n , we obtain α 1 ( y 1 (2 s )) > 0 (see the definition of α 1 b elo w (9)). It follows that ¯ F i ( y 1 (2 s )) > 0 for an y i = 1 , . . . , n . F urthermore, observe that P n i =1 ¯ F i = 1 implying that F 1 ( y 1 (2 s )) ∈ e ∆ n . It is then trivial to obtain from (A.1) that α 2 ( F 1 ( y 1 (2 s ))) > 0, for any s . Pr op erty P2: F rom (9), it follows that F 3 ( y 1 (2 s )) = F 2 ( F 1 ( e i )) = F 2 ( e i ) = e i . Pr op erty P3: Let p = 1 , 2. The fact that F p : ∆ n → ∆ n is con tin uous on e ∆ n is straigh tforw ard; [Lemma 2.2, (Jia et al., 2015)] shows that F p is Lipsc hitz con tin uous ab out e i with Lipschitz constant 2 √ 2 /c i,p . It is then straigh tforward to verify that the comp osition F 3 = F 2 ◦ F 1 : ∆ n → ∆ n is contin uous. Pr op erty P4: Define the set A = { y 1 ∈ ∆ n : 1 − r ≥ y i ≥ 0 , ∀ i ∈ { 1 , . . . , n }} (A.3) where r is strictly p ositiv e. In [Theorem 4.1, (Jia et al., 2015)], it is sho wn that for a sufficiently small r , there holds F p ( A ) ⊂ A , for p = 1 , 2. In fact, F i ( y 1 ) < 1 − r, ∀ i ∈ { 1 , . . . , n } ). It follo ws that F 1 ( A ) ⊂ A ⇒ F 2 ( F 1 ( A )) ⊂ A , which implies that F 3 ( A ) ⊂ A . Brou wer’s fixed-p oin t theorem then implies that there ex- ists at least one fixed p oin t y ∗ 1 ∈ A such that y ∗ 1 = F 3 ( y ∗ 1 ) b ecause F 3 is a contin uous function on the compact, con- v ex set A . In the ab o ve pro of for Prop ert y P1, w e show ed that if y 1 (2 s ) ∈ e ∆ n , then α 1 ( y 1 (2 s )) and α 2 ( F 1 ( y 1 (2 s ))) are both strictly p ositiv e. F or an y i = 1 , . . . , n , consider no w y ∗ i = ¯ F i ( y ∗ 1 ). W e hav e ¯ F i ( y ∗ 1 ) = α 2 ( F 1 ( y ∗ 1 )) c i, 2 1 − α 1 ( y ∗ 1 ) c i, 1 1 − y ∗ i (A.4) whic h implies that ¯ F i ( y ∗ 1 ) > 0 b ecause c i,p > 0 for p = 1 , 2 and y ∗ i < 1 from the fact that y 1 ∈ e ∆ n . In other words, y ∗ i is strictly p ositiv e for all i = 1 , . . . , n . W e th us conclude that y ∗ 1 ∈ int(∆ n ) ⊂ A , i.e. no point on the b oundary of ∆ n is a fixed p oin t apart from e i . App endix B. PROOF OF THEOREM 3 Observ e that y ∗ 1 = F 2 ( F 1 ( y ∗ 1 )). Next, define z ∗ 2 = F 2 ( y ∗ 1 ). W e thus hav e y ∗ 1 = F 2 ( z ∗ 2 ). Next, observe that F 1 ( y ∗ 1 ) = F 1 ( F 2 ( z ∗ 2 )) which implies that z ∗ 2 = F 1 ( F 2 ( z ∗ 2 )) = F 4 ( z ∗ 2 ). In other w ords, z ∗ 2 is a fixed p oin t of F 4 . F or any s , supp ose that y 1 (2 s ) = x (2 s − 1) = y ∗ 1 . F rom the fact that x (2 s ) = F 1 ( x (2 s − 1)), it follo ws that y 2 (2 s ) = x (2 s ) = z ∗ 2 . One can then obtain x (2 s + 1) = y 1 (2 s + 2) = F 3 ( y 1 (2 s )) = y ∗ 1 . Lik ewise, we conclude that x (2 s + 1) = y 2 (2 s + 2) = F 4 ( y 2 (2 s )) = z ∗ 2 . Because the abov e argumen ts hold for an y s , statement T1 in the theorem readily follo ws. Statement T2 follows likewise.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment