Altering nodes types in controlling complex networks
Controlling a complex network towards a desired state is of great importance in many applications. A network can be controlled by inputting suitable external signals into some selected nodes, which are called driver nodes. Previous works found there …
Authors: Xizhe Zhang, Yuyan Zhu, Yongkang Zhao
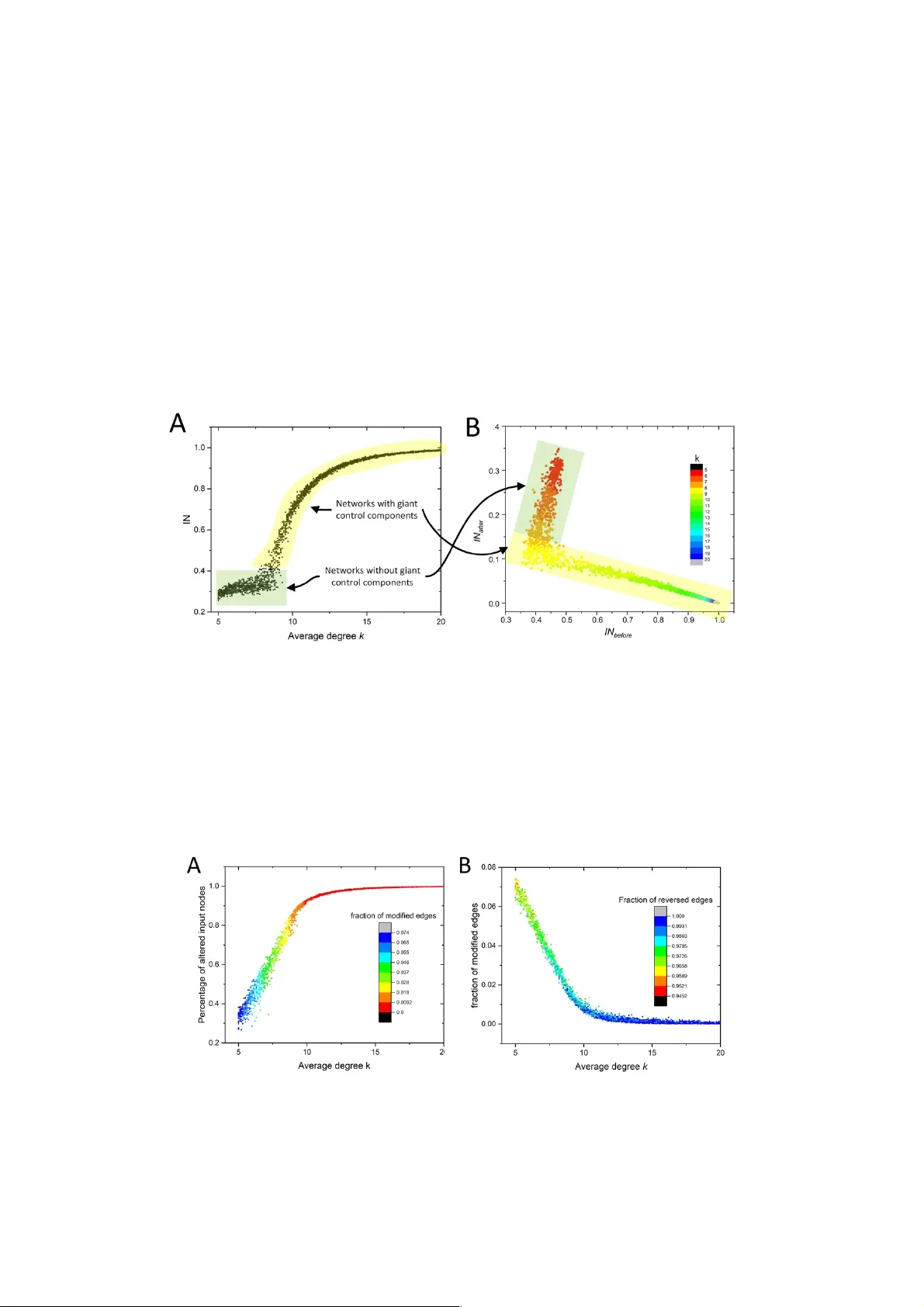
Altering nodes types in controlling complex networks X IZHE Z HANG 1 ,2 * , Y UY AN Z HU 2,3 and Y ONGKANG Z HAO 2, 4 1 School of Computer Science and Engineering , Northeaster n University , Shenyang, Liaoning , China 2 Joint Laboratory of Artificial Intel ligence and Precision Medicine of China Medical University and Northeastern University , Northeaste rn Universit y , Shenyang, Liaoning , China 3 The First Hospita l of China Medical Univers ity, Shenyang , Liaoning , China 4 Nat ional Institute of Health a nd Medical Big Data , China Medical University , Shenyang, Liao ning , China * E - mail: zhangxizhe@mail.neu.edu.cn Abstract – Controlli ng a co mplex network towards a desired state is of great i mportance in many applications. A network can be controlled by i nputting suitable ext ernal signals into some selected nodes, which are called drive r nodes. P revious works fo und there e xist two c ontrol mode s in dense networks: distribut e d and centralized modes. For networks with the distributed mode, most of the nodes can be act as dri ver nodes; and thos e wi th the centralized mode, most of the nodes never be t he driver nodes . Here we present an efficient algorithm to change the control ty pe of nodes, from input nodes to redundant nodes , which is done by reversi ng edge s of the network . We conclude four possible cases when reversing an edge and show t he control mode can be changed by reversing very few in - edges of driver nodes. We evaluate t he performance of our algori thm on both synthetic and real networks. The experimental results show that the control mode of a network can be easi ly changed by r eversing a few elaborately selected edges, and the number of possible driver nodes is dramatical ly decreased. Our methods pro vide the ability to design the d esired control modes of the network for different control scenarios, which may be used in many a pplication regions. Introduction. Controlli ng complex networ ks is a fund amental chall enge in many compl ex systems [1 - 3]. A complex network can be driven to a desired state if some suitable external control signals are inputted into the network. Recently , the network control theory [3 - 5], which combine the power of control theory and network theory , are extensively used i n analyzing complex networks of many applicatio n regions, e.g., identifying dise ase genes based on protein - protein interaction network [6 - 9], analyzing brain networks [10,1 1 ] and finding drug - target in metabolic network [12,13]. According to str uctural c ontrol th eory , a network is said to be contr ollable if it c an be dri ven from any initial state to a desired final state by inputting external control signals [2]. The driver n odes are the nodes which used to input external signals. Owing to the structur al complexity of the network, we usually only need a few driver nodes to f ully control t he network. The minimum set of driver no des (MDS) provides a use ful perspective to underst anding the control principles of complex networks [14 - 16]. Previous work [3] have f ound that the MDS o f a network can be obt ained by any maximum matching of th e network, which the unmatched nodes are t he driver nodes. Based on this f ramework, many works have been done to analyze the control properti es of various networks. Liu et.al [3] found that the driver nodes tend to avoid hub noe s and the degree distri bution is closely related to the size of M DS of the networks. Menichetti et.al [17] further investi gat ed t he size of the MDS and found t he number of the low in - degree nodes main determined the size of the MDS. Ruths et.al [18,19] clas sified the MDS int o source nodes, external dilation poi nts, inter nal dilation points and presented contr ol profile t o quanti fies the control structures of complex networks. For control of the particular parts of t he network, Pi ao et.al [20] presented a method which used immune nodes to facil itate the control of the communities. Gao e t.al [21] presented an analy tical framework t o investigate the target control of complex networks. For most of the real networks, the maximum matching is usually not unique, so does the MDSs. Because th e number of MDSs may be numerous and exponentia l to network size [ 14], we can define two cont rol types of nodes bas ed on their participa tion in MDSs: 1. input nodes, wh ich appear in at lea st one MDSs ; 2. redundant no des, which neve r appear in any M DSs. Previou s works [16,22 ] found a surprising bifurcation phenomenon in dense networks, in which the major ity of nodes are either input nodes or redundant nodes. This bimodality le ads to two control modes: 1. centralized mode, which the most nodes of the ne twork are redundant nodes; 2. distr ibuted mode, whic h th e mos t no des o f t he ne twork are inp ut n odes. Our recent work [16] present the input gr aph, a simple geometry which revealing the complex control correlation of all nodes. W e found that the giant components emer ge in many real networks, whic h provides a clear topological explanation of bifurcation phenome non emerging in dense networks. For the network with centralized control, only a few nodes can be inputted external control signals, that means the selection of control schemes are limited. For a network with distributed cont rol, most nodes can be used as dr iver nodes and t he control scheme i s more flexible. Previous works [22] found that the control modes can be altered via structural perturbations, however, they did not provide the method to identify t he minimum n umber of edges whose reversal can change t he control mode of a network. Although our pr evious work s [16, 23] alre ady present the met hod to a lter cont rol mode based on adding or removi ng edges, we believe it is sti ll necessary t o present a new method based on edge reve rsal. In some real control scenarios, reversing an edge may be more f easible than adding or re moving e dges. Fo r exampl e, in transp ortatio n networ k such as ai rline n etwork, removi ng an e dge may decrease the ability of the network, and adding an edge is too expensive. Therefore, reversing an edge may be a good choice to change the control properties of the network . F urthermore, to design the desired control schem e of a network, w e m ay need all possible m ethods including adding, removing or reversing edges. Therefore, the method ba sed on e dge r eversal is an important piece for design the control scheme of the complex network. Here we presen t an efficient metho d to alter the co ntrol modes, whi ch is mainly bas ed on the edge rever sal. The method is bas ed on our pr evious works about the contr ol connectivity between nodes, which prove that the input node must be reachable from at least one driver node. Therefore, to al ter the control mode of a network, a simple way is to change the connectivity of the nodes. Based on this idea, we design an ef ficient method to alter a network from distributed control to centralized control. The experimental results on both synthetic and real networks showed that our metho d can be efficient alter the control mod e of a network. Structural controllability and maximum matching Consider a linear t ime - invariant ne tworked system s G, its dynamic s can be described b y the following eq uation: (1) where the s tate vector x ( t )= ( x 1 ( t ), …, x N ( t )) T denotes the value of N nodes in the network at ti me t , A is the transpose of the adjacency matrix of the network, B is the input matrix that defines how control signals are inputted to the network, and u ( t )=( u 1 ( t ), …, u H ( t )) T represents the H inp ut signals at time t . According to t he Kal man r ank co ndition [2] , t he ne tworked syste m G is controllable if and only if the controllability matrix C =( B ,AB,A 2 B, …, A N -1 B ) ∈ ℝ N × NM has ful l rank, i. e., rank ( C )= N . Howev er, in some cases, the exact value of the nonzero elements in A and B is not available and the precise computation of rank ( C ) is therefore unattainable. For those cases, Lin [1] introduced the weaker form of controllability, which is called structural controllability. The structural controllability theory tr eats A and B as structured matrices, i.e., their elements are either fixed zeros or free parameters. The system is structurally controllable if the maximum rank o f C , denoted by rank ( C ), can reach N as a function of the fr ee parameters in A and B . Based on this framework, Liu et.al [3] present the minim um input theor em to identify th e minim um nu mber of driver nodes N D needed to control the whole network of N nodes. They found that the unmatched nodes w.r.t. any maximum matching of the network is t he MDS . Consider the network representati on G ( V, E ), where V is the set of nodes and E is the set of directed edges. T o analyze the control- lability of the directed network, we need to convert it to an undirected bipartite graph. Th e bipar tite graph is bui l t by splitting the node set V into two node sets V in and V out , where a node n in G is converted to two nodes n in and n out in B , and nodes n in and n out are, r espectively , connected to the in - edges and out - edges of node n . Fig . 1 give an example of the ne two rk and its bipartite graph . Fig. 1: Maxi mum matchi ng and c ontroll abili ty of a n etwork. a. a si mple di rected networ k and it s corre spondin g bipar tite gr aph rep re- sentation. For any node n in a directed net work, it is converted to two nodes n in and n out in B , and nodes n in and n out are, respecti vely, connected to the in - edges and out - edges of node n . The re d edges ar e maximum matchi ng. The unmatche d nodes of in - set are driver node. (b) Alternating paths and node classification. For any alternating paths start with driver nodes, all nodes within the paths are input ( ) ( ) ( ) t B t A dt t dx u x + = nodes, i.e., nodes {3,4,6,7}. The nodes which do not connect with driv er nodes thr ough alterna ting paths a re redundant n odes, i.e. , node {5}. A match ing is a set of edges in which no edge shares common nod es. The edges belong t o a ma tchi ng are called matched edges. A node is said to be matched if there is a matched edge linked to the node; Otherwise, the node is unmatched. The unmatched nod es in V out are called unsaturated nodes , and the unmatched nodes in V in are called dr iver nodes . A p ath i s said t o be an alternati ng path if the edges of the path are alternately in and not in the matching. An alternating path that begins and ends on t he unmatched nodes is called the augmenting path. A maximum matching is a matching with the maximum numb er of edges. According to the structural controll ability theory, for any m aximum m atching of the netw ork, the set of unm atched nodes in V - is called Minim um Driver no des Set ( MDS ). The maxi mum matching of the networ k is not un ique, so does the MDS . A node is called an input node if it appears in at least one MDS . Otherwise, we call it a redundant node . Previous work s [ 16] found that in some dense networks , the majority of nodes of a network are either input nodes or redundant nodes. This bifur cation phenomenon l eads t o two control m odes of the networks: centralized control and distributed control. For networks with distributed control, most of the nodes are input nodes. For the networks with central- ized control, most of the nodes are redundant nodes. Therefore, to alter the control modes of a network, we need to change th e control type of most of the nod es of a network. Method In th is se ction, we will introduce how to alter a network from distributed mode to centralized mode by rever s ing the direction of few selected edges. For a network with the distributed mode, most of the nodes are input node s. Therefore, we only need to change these input no des to redundant nodes. To change th e contro l type of nodes , we first intr oduce two theorems of our previ ous works [16], which identify the input no de and redunda nt node based on their connectivity with driver node s. Theorem 1: For any MDS D and a driver node n ∈ D , any node which can be reached by n through any alternating path is an input node; Theorem 2: For any MDS D , if node m cannot be reached by any driver nodes of D through any alternating path, m mu st be a redundant node. Based on the above two theorems, the control type of the nodes simply depends on their connectivity to the driver nodes. Thus, similar to the connected component of the graph theory , we can define the alternating connecte d components of the network, in which the nodes are connected with alternating paths. Based on their connectivity with driver nodes, we can define two types altern ating connected components: 1. input component, which contai ns at l ea st one driver node; and 2. matched component, which contains no driver node. Our previous works [16] proved that the control modes are r ooted by the emerging of giant alternating connecte d components of complex networks. The networks wit h distributed mode have a giant input component, and the networks with centralized mode have a giant matched component. All nodes of the input component are input nodes and all those of the matc hed component are redundant nodes. Therefore, to al ter the control mode of a network, we only need to change the type of t he largest alternating connected component of the network. Based on Theorem 1 and 2, our previous works [16,23] present t he met hods to change the control mode b y addin g edges or removi ng edges. In this paper, w e co nsider how to change the network from di stributed control to centralized control by reversing edges. C onsider a network G , the basic idea of altering a network with a giant input component is to remove all driver nodes from the componen t. However, revers in g edges are more complex than adding or removing edges. Suppose node b is a driver node connected with input component N by edge e ( a , b ), to revers e the dir ection of e ( a , b ), w e need to remove e ( a out , b in ) and add e ( b out , a in ) into the bipartite graph. Therefore, reve rsing a n edge in the network equal to remove one edge and add another edge in the bipartite graph, which make s this problem more difficult than adding or removing edges. For a driver node b and its in - edge e ( a , b ), there are four possible c ases in the bipartite graph af ter reversing the direct ion of e ( a , b ): Case 1(Fi g . 2B) : node a in is not in the component N and b out is not connect ed with N ; Case 2(Fi g. 2C) : node a in is in compo nent N and b out is connect ed with N ; both of them are matched node s and ca nnot be r eachable by any unmatched node through al ternating path; Case 3(Fig. 2D) : node a in is in c omponent N and b out is c onnect ed wi th N ; node b out can be reachable by at least one unmatched node through the alternating path, while node a in cannot. Case 4(Fig. 2E) : node a in is in compon ent N and b out is connect ed wi th N ; node a in can be reachable by at least one u nmatched node through the alternating path, while node b out cannot; Note that node a and b cannot both in the component and be reachable by driver node, otherwise, there will be an augmenting path connected a and b, which is contradicting to the maximum matching. Fig. 2 show an example of these four cases. F or cases 1, 2 and 3, it is easy to se e, after reversing edge e ( a , b ), the drive r nodes b is successfully detached from input component N . For case 4, however, node a in is still in the input compone nt N and can be reached by driver node. Therefore, based on Theorem 1, all nodes of component N are still input nodes. In this case, we need to remove edge e ( b, a ) to detach node a from the input component N . Fig. 2: Four possible cases when rever sing an in - edge e ( a , b ) of a driver node b . A . The input component N bef ore reversing the edge. Because node b is a driv er no de, a ll nod es of N are the input nodes; After reversing e ( a , b ), we ha ve fo ur poss ible case s: B. (c ase 1) node a in an d b out are detached from the component; C. (c ase 2): no de a and b are both matched nodes and within component; D. (case 3): node a in is matched and b out is unmatched; E. (case 4): node a in is unmatched and b out is matched, in this case, if we add edge( b , a ), the component is still an input component, therefore, we need the removed e( b , a ). In summary , to alter a netw ork from d istributed mode to centralized mode, we need to detach all driv er nodes from the lar gest input component of the network. Therefore, the basic idea is to detach driver nodes by revers ing the in - edges. W e conclude f our cases when reversing the in - edges of a driver node, in which the node is successfully detached from input comp onent in cases 1,2 and 3. For case 4, we need to r emove the in - edge of the input node. Based on the above discussion, the algorithm for altering control mode of the network are the follows: Step1: Compute a maximum match ing M of the network G , and let th e driver nodes be se t D ; Step2: For eac h driver node d ∈ D , find all nodes of V in whi ch con nected to the driver node d through alternating paths, denoted as C ( d ); Step3: For each pair of driver nodes d 1 and d 2 , if , merge the set C ( d 1 ) and C ( d 2 ), repeat it until no set can be merged; Step4: Find the largest nodes set of Step 3, denote as set N , let the driver no des of N be the set D N . Step5: For each driver node n ∈ D N , do the follow ing: Step5.1: for each incoming edge e( m , n )of node n , remo ve edge e( m , n ); S tep5.2: if not ( m in ∈ N and m in ∈ D and n out i s connected to N ), add edge e( n , m ). In the above algorithm, we first obtain an MDS by computing any maximum matching of the network in Step 1 and then find the largest input compo nent of the network i n Steps 2 and 3. In Step 5, w e first remove all in - edges of the driver nodes within the component and then add the inver t ed edges into the network except case 4. After processing all in - edges of driver nodes of the component, t he nodes of the component will be turned into matched nodes and the network will be changed to the ce ntralized mode. Experimental results In this secti on, we evaluated the performance of our algorithm on both synthetic and r eal networks. First, we generated some scale - free networks with the number of nodes N= 10 4 , and the power exponent of degree distr ibution γ in= γ out =3. The average degree k varies from 5 to 20 with incre ment 0.1. For each av erage degree k , w e generated 20 random instan ces, in which th e large st alternating co mpo- nents are input components . Therefore, there are total 3,200 net work instances used to evaluate the methods. To e v a l u a t e t h e p e r f ormance of our algorithm, we first computed the percentage of input nodes IN . Fig. 3 A showed the results of IN ( ) ( ) Æ ¹ 2 1 d C d C ! versus average degree k before reversing the edges. W ith the increase of the average degree k , the perc entage of input no des IN increase from 0.25 to 1, indicating t hat denser networks have clearly distributed control mode. Furthermore, with the increase of the average degree, the di stributed mode of the networks is emerging, which is consisted with previous works [22] . For the sparse ne tworks with low k [5,9] , IN are range from 0. 25 to 0.4, which means t hat these networks have no cl early control mode [22] . For the dense networks with high avera ge de gree k Î [9,20 ] , the input nodes are the majority of the networks, which means there exist a giant input comp onent in the networks. Next, we comput ed the percenta ge of i nput node s after revers ing the edges. Fig. 3B showed the percentage of input nodes befor e and after edge rever sal, denoted as IN before and IN after , respectively . The results showed that IN after is decreased after revers ing edges for all network instances. Furthermore, for dense networks which k Î [10,20] , IN after are significantly decreased, i.e., from nearly 90% to 5% when k =14. Fig. 4A showed t he percentage of al tered input nodes IN after / IN before for different k . we can see that for the dense ne twork which k >10, more t han 80% i nput n odes a re c hanged after revers ing ed ges. However , for the network s with low average degree, the input nodes are not sig nificantly changed, as Fig. 3B showed. For networks which k <8, the percentage of input nodes only changed about 10% after reserving edges. This phenomenon is root ed that these networks do not have a giant input component, therefore , they are neither distribut ed mode or centralized mode. Fig. 3: Performance o f our algorithm. W e gener ated 3,500 network instan ces with k Î [5,20] . Each dot repres ents a network i nstance. A . The percenta ge of input nodes IN versus average degree k . B . The p ercentage of input nodes b efore and afte r reversing ed ges. N ext, we computed the number of reversed and removed edges for alt ering the control mode of the netwo rk. Fig. 4 showed that for most network s, t he in put nodes are signifi cantly decreas ed whi le v ery f ew ed ges n eed t o be modif ied. For t he n etwork with k >10, only 1% edges are modified, and nearl y 90% input nodes a re changed, which show our algorithm are very efficient to change the control mode o f the dense networks. We a lso comp ute th e fract ion of rever sed edg es and removed edges when alt ering the co ntrol mode o f the network. Fig. 4B showed that with the increase of a verage degree, we need few edges to chang e the control modes of the network. Furthermore, for all network ins tances, mor e than 94% of modifie d edges are reversed edges, while only very few edges ar e nee ded to be removed. For dense networks with k >10, most networks do not need r emoved edges t o alt er the control mode. Therefore, our algorithm only needs to remove very few ed ges when altering control m ode. Fig. 4: The modified edges versus aver age degree k . A. the pe rcentage of altered input nodes are significan tly increased with the average degree k , while onl y need ver y few edg es to be modified; B. the mod ified edges are decreased w ith the average degree k , in which m ost edges are the reversed edges. Î To demon strate the feasibility of our algorithm, we applied our algorithms to several real networks. These ne tworks are selected based on their diversity of topological structure, including biological networks, social networks, and technical networks. For each net- work, we show its type, name, number of nodes ( N ) and ed ges ( L ), size of the largest inpu t compo nent IC max , the percentage of modified edges ( p m =Num me / L ), the percentage of reversed edges ( p r =Num re / Num me ), the percentage of changed input nodes ( Δn D ) and the per- centage of size of changed input component ΔIC max . The detailed results are listed in Table.1. Overa ll, the largest input components of these network s can be completed altered by reversing and remover edges. For the high average degree network , such as Amazon0505 product co - purchasi ng network, 87.83% of input nodes have dramatically changed after reversing l ess than 1% edges. Similar results are found in the Twi tter network and Sla shdot network. For t he other networks suc h as P2P networks, we c an still change the control modes of t he net work, yet t he nu mber of edges need s to be modified are relatively high. This may be caused by these networks did not have a dense connected input component. However, compared previous works which reversing all ed ges to cha nge the mode, our algo- rithm still has better performance . Table 1: Resu lt of some r eal networks. For each network, we sho w i ts type, name, number of node s ( N ) and edges ( L ), size of the largest input component IC max , the perce ntage of modified edges ( p m =Num me / L ), the percentage of r eversed edges ( p r =Num re / Num me ), the percentage of changed input nodes ( Δn D ) and the percentage of size of ch anged input compon ent ΔIC max Type Name N L I Cmax pm pr ΔnD ΔI Cmax Food Web Mangro ve 97 1492 55.67% 5.03% 58.67% 37.11% 9 8.15% Silwood 154 370 84.42% 75.14% 80.94% 25.97% 9 6.92% Trust Slashdot0902 82168 948464 91.23% 9.41% 80.92% 86.73% 9 9.99% Citation ArXiv - HepTh 27770 352807 14.44% 0.60% 85.29% 10.90% 9 8.98% WWW NotreDame 325729 1497134 53.90% 15.20% 86.36% 14.71% 9 4.53% Google 875713 5105039 21.81% 4.21% 92.12% 11.41% 99.72% Internet p2p -1 10876 39994 90.58% 50.08% 78.79% 52.65% 99.84% p2p -2 8846 31839 90.55% 51.18% 77.55% 53.57% 99.79% p2p -3 8717 31525 91.75% 50.80% 76.92% 53.60% 99.30% Organizat ional Consulting 46 879 97.83% 3.53% 93.55% 93.48% 97.78% Social communica- tion UClonlin e 1899 20296 79.94% 12.36% 97.81% 50.45% 99.93% Product co - purchasing net- works Amazon0505 410236 3356824 91.35% 0.92% 94.64% 87.83% 99.99% Amazon0302 262111 1234877 8.76% 0.32% 95.00% 8.07% 97.11% Social network twitter_combin ed 81306 1768149 79.40% 3.04% 90.66% 60.69% 99.75% Conclusion Controlli ng a co mplex network is a fundament als tas k for v arious app lications. The complex structure of th ese network s formin g two distinct control modes of the networks, which may be useful for different control purposes. The control type of nodes ha s been proved useful in identifying drug target [13] , cancer genes [24 , 25] and understanding the role of neurons [26] . Understanding and ma- nipulating control properties of the networks ar e of great importance in many appli cations, especially biol ogical networks. H ere we present a method t o alter the contr ol modes of the networks by reversing very few edges. The results showed that we ca n efficient ly change a network from a distributed mode t o central ized mode . This may be usefu l in some control scenario . For exa mpl e, consider a network with distributed control modes, which means there exi st many available control schemes can contr ol the net work, which may prov ide weakness for some malicious attackers . A feasible response is t o ch ange the control mode to centrali zed mode , wh ich means o nly very few dri ver nodes can con trol th e network . Our algorithm c an also be used to change the contr ol t ype of specific node of the network. For example, to change a node from input nodes to redundant nodes, we can si mply detach the nodes from t he input compone nt or alter the mode of the input compone nt. Pr evious works [9] have found that indispensable nodes of Protein - Prot ein interaction networks may be critical in cancer study, and indispensable nodes are parts of redundant nodes. Therefore, the type change of these driver genes may be useful in the transitions between health and disease state [9] . The li mitation of our algorithm is that it can only change the control modes from distributed mode to centralized mode. To change the mode from centralized to distribu ted mode are m ore complex and we will finish it in the future work. Conflicts of interest The authors declare no co nfl icts of interests. REFERENCES [1] L IN C. T., IEEE.TRANS.AUTOMATIC Control , 19 (1974) 201. [2] K ALMAN R., Journal of the Society for Industrial and Applied Mathematics Series A Control , 1 (1963) 152. [3] L IU Y. Y., S LOTINE J. J. AND B ARABSI A. L., Nature , 473 (2011) 167. [4] N EPUSZ T. AND V ICSEK T., Nature Physics , 8 (2011) 568. [5] N ACHER J. C. AND A KUTSU T., Scienti c Reports , 3 (2013) 1647. [6] W UCHTY S., Proceedings of the National Academy of Sc iences , 111 (2014) 7156. [7] A MAND , M ELISSA M S., K EVIN T., D EVESH R., R OBIN SON A. S. AND O GUNNAIKE B. A., Plos One , 9 (2014) e87973 . [8] L IU X. AND P AN L., IEEE/ACM Trans Comput Biol Bioinform , 12 (2015) 467. [9] V INAYAGAM A., G IBSON T. E., L EE H. J., Y ILMAZEL B., R OESEL C., H U Y., K WON Y. , S HARMA A., L IU Y. Y. AND P ERRIMON N., Proc Natl Aca d Sci U S A , 113 (2015) 4976. [10] G U S., P ASQUALETTI F., C IESLAK M., T ELESFORD Q. K., Y U A. B. , K AHN A. E., M EDAGLIA J. D., V E TTEL J. M., M ILLER M. B. AND G RAFTON S. T., Nature Co mmunications , 6 (2015) 8414. [11] T ANG E. AND B ASSETT D. S., ar X iv , (2017) [12] A SGARI Y., S ALEHZADEHYAZDI A., S CHREIBER F. AND M ASOUDINEJAD A., Plos One , 8 (2013) e79397 . [13] S UN P. G., New Journal of Physics , 17 (2015) 085009. [14] X. Z HANG , H. W ANG , AND T. L V ., PLoS One , 12 (2017) [15] X. Z HANG , Y. Z HANG , T. L V , AND Y. Y IN ., Phys. A Stat. Mech. its Appl . 442 (2016) [16] X. Z HANG , T. L V , AND Y. P U ., Sci. Rep , 6 (2016 ) [17] G IULIA M., L UCA D. AND G INESTRA B. , Physica l Review Letters , 113 (2014) 078701. [18] J USTIN R. AND D EREK R. , Science , 343 (2014) 1373. [19] C AMPBELL C., R UTHS J., R UTHS D., S HEA K. AND A LBERT R. , Scientic Reports , 5 (2015) 18693. [20] X. P IAO , T. L V , X. Z HANG , AND H. M A ., Phys. A Stat. Mech. its Appl , 421 (2015) [21] J G., YY L., RM D. AND SI AL B. , Nature Communications , 5 (2015) 5415. [22] J IA T., L IU Y., C SOKA E., P O SFAI M., S LOTINE J. E. AND B ARABASI A. , Nat. Commun. , 4 (2013) . [23] X. Z HANG AND Q. L I ., Phys. A Stat. Mech. its Appl , 516 (2019)185 [24] K ANHAIYA K., C ZEIZLER E., G RATIE C. AND P ETRE I. , Sci Rep , 7 (2017) 10327. [25] X. Z HANG ., IEEE/ACM T ransactions on C omputational Biology and Bioinformati cs , (2018)1 [26] Y AN G., V RTES P. E., T OWLSON E. K., C HEW Y. L., W ALKE R D. S., S CHAFER W. R. AND B AR ABSI A. L. , Nature , 550 (2017) 519.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment