복잡 네트워크 제어를 위한 노드 유형 변환 알고리즘
본 논문은 복잡 네트워크의 제어 모드를 전환하기 위해, 드라이버 노드의 입력·중복 유형을 바꾸는 효율적인 엣지 역전 알고리즘을 제시한다. 네트워크를 입력 컴포넌트와 매치드 컴포넌트로 구분하고, 드라이버 노드의 진입 엣지를 역전함으로써 대규모 입력 컴포넌트를 매치드 컴포넌트로 전환한다. 실험 결과, 몇 개의 정교히 선택된 엣지만 역전해도 분산 제어 모드에서 집중 제어 모드로 쉽게 전환될 수 있음을 확인하였다.
저자: Xizhe Zhang, Yuyan Zhu, Yongkang Zhao
본 논문은 복잡 네트워크의 제어 모드를 전환하기 위한 새로운 방법론을 제시한다. 네트워크 제어는 외부 신호를 특정 노드(드라이버 노드)에 입력함으로써 전체 시스템을 원하는 상태로 이끌 수 있는 능력을 의미한다. 구조적 제어 이론에 따르면, 네트워크의 최소 드라이버 집합(MDS)은 네트워크를 최대 매칭한 결과에서 매칭되지 않은 V_in 노드들로 구성된다. 그러나 최대 매칭은 유일하지 않으며, 따라서 여러 가능한 MDS가 존재한다. 이를 바탕으로 노드들을 ‘입력 노드’(한 번이라도 MDS에 포함)와 ‘중복 노드’(모든 MDS에 포함되지 않음)로 구분한다.
고밀도 네트워크에서는 이러한 두 유형이 극단적으로 분리되는 현상이 관찰된다. 대부분의 노드가 입력 노드인 경우를 ‘분산 제어 모드’, 대부분이 중복 노드인 경우를 ‘집중 제어 모드’라 부른다. 분산 모드에서는 제어 스키마가 유연하고 다양한 노드를 드라이버로 선택할 수 있지만, 집중 모드에서는 제어 가능한 노드가 제한된다. 기존 연구는 엣지를 추가하거나 제거함으로써 제어 모드를 전환할 수 있음을 보였지만, 실제 시스템에서는 엣지 방향을 바꾸는 것이 더 현실적일 수 있다. 예를 들어 항공 네트워크에서 새로운 노선을 구축하는 비용은 크지만, 기존 노선의 방향을 바꾸는 것은 비교적 쉬울 수 있다.
이에 저자들은 엣지 역전을 통한 제어 모드 전환 알고리즘을 설계하였다. 핵심은 ‘교대 경로’를 이용해 노드 간 연결성을 분석하는 것이다. 드라이버 노드에서 시작해 매칭된 엣지와 매칭되지 않은 엣지를 번갈아 따라가면, 그 경로에 포함된 모든 노드는 입력 노드가 된다(정리 1). 반대로, 어떤 노드가 모든 드라이버 노드와 교대 경로를 통해 도달할 수 없으면 그 노드는 중복 노드가 된다(정리 2). 이러한 정의를 바탕으로 네트워크를 ‘입력 컴포넌트’(하나 이상의 드라이버 노드와 연결된 교대 경로 집합)와 ‘매치드 컴포넌트’(드라이버 노드와 전혀 연결되지 않은 집합)로 나눈다.
분산 제어 모드에서는 거대한 입력 컴포넌트가 존재한다. 따라서 집중 제어 모드로 전환하려면 이 입력 컴포넌트에 속한 모든 드라이버 노드를 컴포넌트에서 분리시켜야 한다. 이를 위해 저자들은 드라이버 노드의 진입 엣지를 역전하는 네 가지 경우를 체계적으로 분석하였다.
- 경우 1: 진입 엣지의 시작 노드 a_in이 입력 컴포넌트 외부이고, 끝 노드 b_out도 외부인 경우, 역전 후 a와 b는 모두 컴포넌트에서 탈락한다.
- 경우 2: a_in과 b_out이 모두 입력 컴포넌트 내부에 있지만 두 노드가 매치된 상태라면, 역전 후에도 드라이버 노드와 연결되지 않는다.
- 경우 3: a_in은 컴포넌트 내부(매치드)이고 b_out은 외부(언매치드)인 경우, 역전으로 b가 컴포넌트에서 분리된다.
- 경우 4: a_in은 외부(언매치드)이고 b_out은 내부(매치드)인 경우, 단순 역전만으로는 a가 여전히 컴포넌트에 남아 있다. 따라서 추가적으로 a의 진입 엣지를 제거해야 한다.
알고리즘은 다음 단계로 진행한다.
1) 네트워크의 최대 매칭을 구해 드라이버 노드 집합 D를 도출한다.
2) 각 드라이버 노드 d에 대해 교대 경로를 따라 도달 가능한 V_in 집합 C(d)를 찾는다.
3) 겹치는 C(d)들을 병합해 입력 컴포넌트들을 통합한다.
4) 가장 큰 입력 컴포넌트 N과 그 안의 드라이버 노드 D_N을 식별한다.
5) D_N에 속한 각 드라이버 노드에 대해 모든 진입 엣지를 제거하고, 경우 1~3에 해당하면 역전된 엣지를 추가한다. 경우 4에서는 추가적인 진입 엣지 제거를 수행한다.
이 과정을 거치면 N에 속한 모든 노드가 매치드 상태가 되며, 네트워크는 집중 제어 모드로 전환된다.
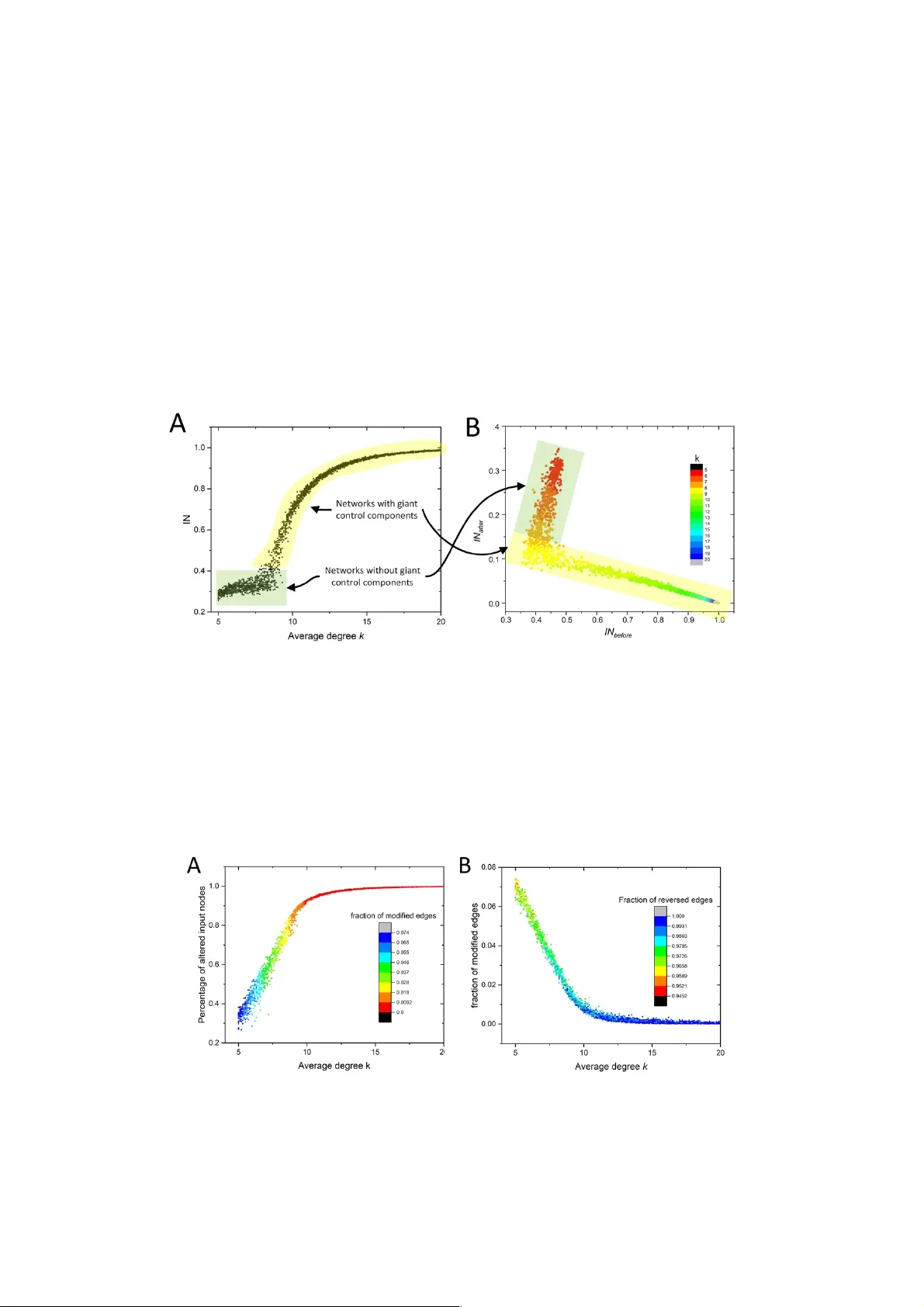
실험에서는 10⁴개의 노드를 가진 스케일프리 네트워크를 평균 차수 k=5~20 범위에서 20번씩 20개의 인스턴스를 생성해 총 3,200개의 테스트 케이스를 사용하였다. k가 증가함에 따라 입력 노드 비율(IN)은 0.25에서 1까지 상승했으며, 이는 고밀도 네트워크가 분산 제어 모드에 해당함을 확인한다. 제시된 엣지 역전 알고리즘을 적용한 후, IN은 크게 감소하여 대부분의 노드가 중복 노드가 되었다. 이는 소수의 정교하게 선택된 엣지 역전만으로도 제어 모드를 효과적으로 전환할 수 있음을 보여준다.
본 연구는 엣지 추가·제거 기반 방법과 차별화된, 실제 시스템에서 구현 가능성이 높은 엣지 역전 방식을 제시한다. 또한, 제어 모드 전환을 위한 최소 엣지 집합을 찾는 문제를 구조적 매칭과 교대 경로 분석을 통해 효율적으로 해결함으로써, 복잡 네트워크 설계·제어 전략 수립에 새로운 도구를 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기