External Constraint Handling for Solving Optimal Control Problems with Simultaneous Approaches and Interior Point Methods
Inactive constraints do not contribute to the solution of an optimal control problem, but increase the problem size and burden the numerical computations. We present a novel strategy for handling inactive constraints efficiently by systematically rem…
Authors: Yuanbo Nie, Eric C. Kerrigan
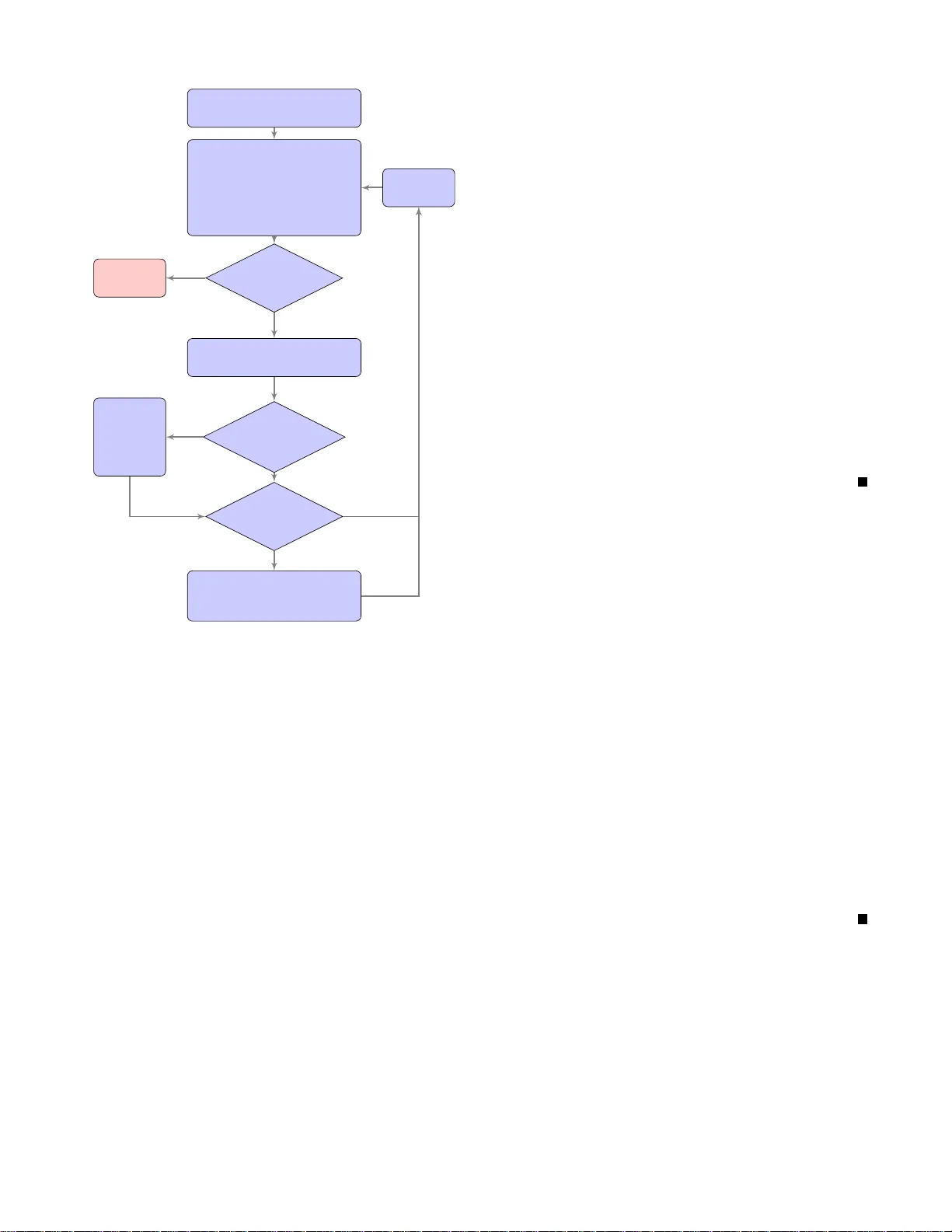
External Constraint Handling for Solv ing Optimal Control Problem s with Simultaneous Approaches and Inter ior Point Methods Y uanbo Nie and Eric C. Kerrigan Senior Member , IEEE ©2019 IEEE. Persona l use of this materi al is permitted. Permission from IEEE must be obtaine d for all other uses, in any current or future media, includi ng reprinti ng/repu blishing this mat erial for adv ertisin g or promotional purposes, cre ating ne w collect i ve works, for re sale or redist ribut ion to servers or lists, or reuse of any copyrighte d compone nt of this work in other works. Abstract — Inactiv e constraints do not contribute to the solu- tion of an optimal control p roblem, but i ncrease the problem size and burden the numerical computations. W e present a nov el strategy f or handling inactive constraints efficientl y by systematically remo ving the inacti ve and r edundant co nstraints. The method is designed to be used together with simultaneous approaches under a mesh refinement framew ork, with mild assumptions th at th e original problem has feasible solutions, and the i nitial solve of the problem is successful. The method is tailored fo r i n terior point-b ased solvers, which are known to be very sensi t iv e to the ch oice of initial points in terms of feasibility . In the example p roblem sh own, the proposed scheme achiev es more than a 40% reduction in computation time. Index T erms — constrained control, optimal cont rol, predic- tive contro l I . I N T RO D U C T I O N Optimal c ontrol h as been very po p ular fo r a wide range of app lications, tha nks to its ab ility to hand le various types of con straints systematically . When f ormulatin g the op timal control pro blem (OCP), it is comm o n pra ctice to impo se a large num ber o f con straints to en sure all m ission specifi- cations ar e fulfilled . Howe ver, for th e solution ob tained, it is often the c ase th at o nly a small subset of the impo sed inequality co nstraints will actually be ac tive. Fu r thermor e, ev en for the ones in this small subset, th e duratio n for which each constraint is active is generally much shorter than the time dimension of th e OCP . On e example would be for the design of flight con trol systems: althou gh all limits of th e flight envelope need to b e sp ecified in th e pr oblem formu latio n for safety r equireme nts, o nly in rar e (a bnorm al) situations is it the case that some limits will b e reach e d . In n u merical op tim al contr ol, the OCPs are transcr ibed into sparse no n linear p rogram ming (NLP) prob lems. A dis- tinction can b e m ade h ere b etween simultaneo us and seque n - tial app roaches, depend ing o n whethe r all or just th e co ntrol trajectories are d iscretized as d e cision variables [1 ]. For this work, we f ocus on the simultaneo us approa c h. The m ain co mputation al overheads f or solv ing the NLP problem s are directly related to the num ber of decision variables and co nstraints. Thus there exist significant com- putational b enefits to exclude inactiv e constraints in th e Y uanbo Nie and E ric C. Ke rrigan are with the Department of Aero- nautic s, Imperial Colle ge London, SW7 2AZ, U.K. yn 15@ic.ac.uk , e.kerrigan@im perial.ac.uk Eric C. Ker rigan is also with the Department of Electric al & Electronic Engineeri ng, Imperial College L ondon, London SW7 2AZ , U.K. Accept ed version to be published in: IEE E Control Systems L etters problem fo rmulation . One p ossibility is to only inclu de the constraints that are determ ined to be active. Based on this, an external strategy for the handling of path constraints with activ e-set based NLP solvers has b een pr oposed in [2]. The idea is to first solve the unco nstrained pr oblem and determine which constrain ts are likely to b e acti ve based on constraint violations. These constraints are then add e d in the OCP and the prob lem is r epetitively solved un til all original constraints are satisfied. Howe ver , a fu ndamen tal prob lem arises when implementin g the same idea on interior point method (IPM) based solvers, since g o od perfo rmance h in ges on the initial point to be feasible, or at least close to feasible [3 ] . Another option is to remove con straints that are inac- ti ve. Removal of constraints for mo del p redictive co ntrol (MPC) has been studied to accelerate compu ta tio ns for linear MPC [4], tub e-based robust lin ear MPC [ 5] and rece n tly nonlinear MPC [6], with compu tational benefits clearly demonstra te d . Howev er , all of th ese are b ased on a qu adratic regulation cost, mak ing their application specifically aimed at re c eding hor izon contr ol of regulatio n tasks. In this pape r, we intro duce an external con straint handlin g (ECH) strategy that is tailor e d to IPM-based NLP solvers for solving a variety of OCPs. Implemen ted together with mesh refinement (MR) schemes, co nstraints that do n ot c o ntribute to the solution a r e systematically removed in th e pro blem formu latio n. Sp ecial attention is p aid to ensu r e feasibility of the initial po int. As a result, significan t co mputation al sa vings can be achieved. Section II gives an introd uction to numerical op timal con trol with d irect collocation. This is fo llowed by a discu ssion of the prop osed ECH strategy in Section III. A flight con trol exam ple is presen ted in Section IV to demon stra te the co mputation al b enefits. I I . N U M E R I C A L O P T I M A L C O N T R O L Generally speaking, optimization-based contr ol re quires the solution of OCPs exp r essed in th e g eneral Bolza form : min x,u,p,t 0 ,t f Φ( x ( t 0 ) , t 0 , x ( t f ) , t f , p )+ Z t f t 0 L ( x ( t ) , u ( t ) , t, p ) dt (1a) subject to ˙ x ( t ) = f ( x ( t ) , u ( t ) , t, p ) , ∀ t ∈ [ t 0 , t f ] (1b) c ( x ( t ) , u ( t ) , t, p ) ≤ 0 , ∀ t ∈ [ t 0 , t f ] (1c) φ ( x ( t 0 ) , t 0 , x ( t f ) , t f , p ) = 0 , (1d) with x : R → R n is th e state trajectory of the system, u : R → R m is the con trol inpu t trajectory , p ∈ R s are static parameters, t 0 ∈ R an d t f ∈ R are the initial an d ter minal time. Φ is the Ma y er c o st fun ctional ( Φ : R n × R × R n × R × R s → R ), L is th e La g range co st fun ctional ( L : R n × R m × R × R s → R ), f is the dy n amic constraint ( f : R n × R m × R × R s → R n ), c is the p a th con straint ( c : R n × R m × R × R s → R n g ) and φ is the b ound ary cond ition ( φ : R n × R × R n × R × R s → R n q ). In p ractice, mo st optim al con trol pro blems for mulated as (1) n eed to b e solved with numerical sch emes. Comp a red to sequ ential m ethods, simultaneo us method s have some advantages with regards to co m putation a l effi ciency , as well as in the treatmen t of path co nstraints and unstable dynam - ics [1]. In this paper, we will demo nstrate o u r p r oposed E CH strategy with the simultaneo us app roach of dire c t co llocation. A. Dir ect collo cation metho ds Direct colloc ation method s can b e categorized into fixed- order h metho ds [7 ], and variable-ord er p / hp method s [8], [9]. Here, we only provid e a high lev el overview . For a mesh of size N := P K k =1 N ( k ) , the states can b e ap proxim ated as x ( k ) ( τ ) ≈ ¯ x ( k ) ( τ ) := N ( k ) X j =1 X ( k ) j B ( k ) j ( τ ) , within mesh in terval k ∈ { 1 , . . . , K } , wh ere N ( k ) denotes the number of collocation points for interval k and B ( k ) j ( · ) are basis fu nctions. For typica l h methods, τ ∈ R N takes values on the interval [0 , 1 ] rep resenting [ t 0 , t f ] , and B ( k ) j ( · ) a r e el- ementary B-splines of various order s. For p / hp method s, τ ∈ [ − 1 , 1] a nd B ( k ) j ( · ) are Lagr ange in terpolating poly nomials. W e use X ( k ) j and U ( k ) j to r epresent the app r oximated states and inpu ts at colloc a tio n p oints, e.g. X ( k ) j = ¯ x ( k ) ( τ ( k ) j ) ∈ R n , wher e τ ( k ) j is the j th collocation poin t in mesh inte r val k . Consequently , the OCP (1) c a n be app r oximated by min X,U,p,t 0 ,t f Φ( X (1) 1 , t 0 , X ( K ) f , t f , p ) + K X k =1 N ( k ) X i =1 w ( k ) i L ( X ( k ) i , U ( k ) i , τ ( k ) i , t 0 , t f , p ) (2a) for i = 1 , . . . , N ( k ) and k = 1 , . . . , K , subject to, N ( k ) X j =1 A ( k ) ij X ( k ) j + D ( k ) i f ( X ( k ) i , U ( k ) i , τ ( k ) i , t 0 , t f , p ) =0 (2b) c ( X ( k ) i , U ( k ) i , τ ( k ) i , t 0 , t f , p ) ≤ 0 ( 2 c) φ ( X (1) 1 , t 0 , X ( K ) f , t f , p ) =0 (2d) where w ( k ) j are the qu a drature weights for th e chosen dis- cretization, A ( k ) is the numerica l differentiatio n matrix with element ( i, j ) deno ted by A ( k ) ij and D ( k ) i is a row vector . The discretized pro blem can th en be solved w ith off-the- shelf NL P solvers. The N L P solver generates a discretized solution Z : = ( X , U , p, τ , t 0 , t f ) as sam pled data points. Interpo lating splines may b e used to constru ct an appro xima- tion o f th e con tinuou s- tim e optimal trajectory t 7→ ˜ z ( t ) : = ( ˜ x ( t ) , ˜ u ( t ) , t, p ) . The quality o f the inter p olated solution needs to be assure d through error analysis, assessing the lev el of accu racy and constraint satisfaction at a mu ch h ig her resolution than the discretization mesh. If n ecessary , app r opriate m odifications mu st be made to the discretizatio n m esh, until the solutio ns o btained with the new mesh fulfills all p redefined error to lerance levels (e.g . the absolu te loca l err or η tol and the abso lute local constra in t violation ε c tol ). Th is pro cess of MR is c r ucial in solvin g large-scale pro blems efficiently . For instance, it took 6 MR iterations fo r the example problem to be solved to a specific tolerance level. This level of a c c uracy was no t achievable with a ny un iform mesh using the same deskto p com p uter . I I I . E X T E R N A L C O N S T R A I N T H A N D L I N G A. Active and in a ctive con straints A constraint (1 c) is conside red a ctive if its presence influences the solu tion z ∗ ( · ) : = ( x ∗ ( · ) , u ∗ ( · ) , p ∗ , t ∗ 0 , t ∗ f ) . A constraint is inactive if it can b e re moved without affecting the solution. T o cla r ify , conside r a simplified prob lem: y ∗ ∈ arg min y Φ( y ) subject to c ( y ) ≤ 0 , where we nee d to identif y co n ditions such that co nstraints can be determine d to be active. The most obvious cr iter ia is wh en the solution y ∗ is at the b oundar y of c i ( y ) ≤ 0 , i.e. c i ( y ∗ ) = 0 . Additionally , co nsider the Lagr angian L := Φ( y ) + λ T c ( y ) and the necessary op timality co nditions (Karush-Kuhn -T u cker ( KKT) con ditions): ∂ Φ( y ) ∂ y | y = y ∗ + λ ∂ c ( y ) ∂ y | y = y ∗ = 0 , c ( y ∗ ) ≤ 0 , λ ≥ 0 , λ ◦ c ( y ∗ ) = 0 , with ◦ the Hadamard produc t. From the includ ed co m- plementary slackness conditio n , we know that for strictly positive Lagr ange mu ltipliers ( λ i > 0 ), th e co rrespon ding solution will have c i ( y ∗ ) = 0 , i.e. the constrain t is active. B. Iden tifying active co nstraints in o ptimal contr ol Theoretically , the above-mention ed analysis ap plies o nly to the con tinuou s OCP formulatio n (1). Add itional chal- lenges will arise in pra c tice when solv ing the discretized problem (2) num erically: the NLP solver will o nly return the values of the discretized state X , input U , and L a g range multipliers Λ at colloc a tion points. T o estimate th e constraint activ atio n status in- between collocation points, a criteria can b e introduce d based on the interpolated con tinuou s trajectory ˜ z . By d efinition, in e q uality constraints are activ e if the m a gnitude of the d ifferences between the ac tu al con straint c l ( ˜ z ( · )) an d the user-defined constraint boun ds are zero . Du e to nume r ical inac curacies, howe ver , ther e will always be a rema inder . Thus, we consid e r a constraint to be po tentially active if th is d ifference is smaller than the constrain t violation to lerance ǫ c tol . Note th at the word po tentially is used to e m phasise that, for n u merical schemes u nder limited machine pre c isio n , no concrete determ ination of co nstraint active status can be made. O n th e other hand , we k now th at o nly if the identified inactive constraints are tr u ly inactive, then ca n they be removed from the OCP withou t affecting the solution s. Thus, it would be much m ore pref erable to erron eously identify inactive co n straints as active, than the opposite situation . For this r eason, we also use the multip lier info rmation to enforce a larger (mo re conservativ e) selectio n of potentially activ e con stra ints. Here, a similar num erical challeng e arises: with limited machine precision , even when the corr espondin g constraints ar e inactiv e, th e m ultiplier values a r e ra rely truly equal to zero . T o id entify the regions where the con straints are likely to be a ctiv e, the n umerical multiplier data Λ is first norm alized between 0 a n d 1 for each con straint c l ( Z ) ≤ 0 . Signal processing algo rithms can be used to identify different in tervals wher e th e behaviour o f Lag r ange multipliers have significant c hanges, f or example using the M AT L A B findc hangepts fun ction. For each identified interv al T i , the mean value o f the normalized multipliers ( ¯ Λ T i ) is c alculated and co m pared based on the following criteria: if ¯ Λ T i ≥ ζ constraint po ten tially activ e in interval T i otherwise constraint po ten tially inactive in inter val T i with ζ a threshold p arameter . T o sum up, the following definition is u sed to de termine whether th e con straints ar e po te n tially a ctiv e or poten tially inactive at different collocation po ints. Definition 1: A co n straint c l ( X i , U i , τ i , t 0 , t f , p ) ≤ 0 is potentially active at tim e t i := t i ( τ i , t 0 , t f ) if o n e of the following criteria is met: • Between adjacen t collo cation points ( t ∈ [ t i − 1 , t i +1 ] ), c l ( ˜ x ( t ) , ˜ u ( t ) , t, p ) ≥ − ǫ c tol holds, with ǫ c tol > 0 . • ¯ Λ T i ≥ ζ , with t i ∈ T i . Otherwise, a con straint is potentially ina ctive at time t i . In add itio n to identifyin g the time instances a t which certain constraints may be p otentially inactive, it is also preferab le to determine the sets of constrain ts that nev er become active at all times. Definition 2: A co n straint c l ( X i , U i , τ i , t 0 , t f , p ) ≤ 0 is potentially r ed unda nt if for all t i := t i ( τ i , t 0 , t f ) with i = 1 , . . . , N , the constrain ts c l ( X i , U i , τ i , t 0 , t f , p ) ≤ 0 are poten tially inactive. Otherwise, this set of con straints is potentially enfo r ce d . C. Initia liza tio n for in terior point methods Interior point method s (IPMs) f or solving NLPs were introdu c ed in the early 1 960s [10]– [12] an d have b ecame very po pular in n u merical op timal control. The idea is to augmen t the o bjective function with barrier function s of constraints in o r der to enfor ce their satisfaction. Potential solutions will iterate o nly in the feasible region fo llowing th e so-called central path, resulting in a very efficient algorithm . Standard inter ior po int meth ods are sensitiv e to the choice of a starting point. T o ensure that the initial guess is strictly feasible with respect to con straints, various initialization methods h ave b een developed ( e.g. [1 3 ] an d th e collective study in [7 ]) and implemented in mod ern solvers. T o ensure reliable and efficient comp utation of the initial- ization alg o rithm, as well as the subsequen t NLP iteratio ns, se veral criteria [ 3] can be fo r mulated regarding ide a l initial points fo r IPMs. The ideal initial poin t should : • satisfy or be close to primal and dual f easibility , • be clo se to the central p ath, • be as close to optimality as possible. Because of these ch aracteristics, external constrain t han- dling schemes developed for active-set based SQP so lvers, such as [2 ], are no t suitable for IPM-based solvers. By first solving the unc o nstrained problem and gr a dually adding con- straints based on the constraint viola tio n erro r , the solution of previous solves will all b e infeasib le f or the new OCP formu latio n, and the solution may undergo d r astic chan ges as well. For I PM-based NLP solvers, this would lead to a higher com p utational overhead for initialization , a s well as higher chan ces f or the iteration s to freq uently enter the slow and u nreliable feasibility restoration p hase. D. Pr op osed S cheme for Constraint Han dling Based on th e criter ia presented in Section III -B and the characteristics of IPMs as discussed in Section III-C, a strategy for efficiently hand ling con straints in OCPs solved with IPM-based NLP solvers is p ropo sed , with the work -flow presented in Fig ure 1. Th e ap proach is called external , since the m odifications to th e OCP are made at the M R iteration lev el, instead of du ring the NLP iterations. The unm odified OCP is first solved o n the initial co a rse mesh. Even with all co nstraint equations in cluded, the com- putation time will still be quite low at this stag e due to th e small pro blem size. Once th e solution is ob tained, potentially inactive constrain ts and poten tially redu ndant con straint sets can be identified, ba sed on Definitions 1 and 2, with poten- tially redu ndant constraints d irectly excluded from th e OCP formu latio n. Fur thermor e, if the problem has a fixed termina l time, i.e. the time instance corresp onding to a m esh po int will not chan g e, then po tentially inactive constrain ts in the potentially enf orced con straint sets may also be removed. Recall that it is prefer a ble to erro neously iden tify an ina c - ti ve con straint as potentially active, rather tha n the opposite. It is th erefore often a go od idea in practice to enlarge the intervals with p otential constraint activ ation b y an inter val of length β in each direction , with β either fixed or a d apting during the MR pro cess. Th is adap tation also guaran tees the conv ergence of the overall scheme, i.e. in th e worst case, β can be sufficiently large to impose the constraints f or the whole traje c tory , with th e o riginal pro blem recovered. In-between M R iterations, spe cial atten tio n must be mad e to co nstraints and co nstraint sets that were determined to b e potentially inactive or re dunda n t in the previous solves. If they n ev er become a c ti ve or enforced again, the constrain t re- moval pr ocess may continue until MR is converged. But there will b e th e cha n ce, af ter refin ing the mesh, the con straint violation erro r analysis dictates that certain co n straints and Solve u nmodified OCP (coarse mesh) Error analysis and mesh refinement; identify potentially inactive constraints and potentially redund ant constraint sets based on the unm odified pr oblem all erro rs within tolerance? Remove potentially redu ndant constraint sets fro m OCP fixed terminal time p r oblem? Remove potentially inactive constraints from OCP any constraint reactiv ated? Solve the aux iliary f easibility problem and use the solution as initial gu e ss Solve the new OCP stop yes no yes no yes no Fig. 1. Overvi e w of the proposed extern al constraint handli ng scheme constraint sets tha t have been re m oved ear lier may becom e potentially active or en forced a g ain. If this h a p pens, they need to be inclu ded again to ensu re that th e solution of th e modified OCP is equiv alent to the un modified prob lem. Note tha t the p revious solutio n will no longe r be a feasible initial guess for the new problem form ulation. T o assist the subsequen t solve o f NLPs, the following auxiliary f easibility problem ( AFP) can be so lved befo r e proceed in g: J ∗ := min X,U,p,t 0 ,t f n g X l =1 s l (3a) subject to, fo r i = 1 , . . . , N ( k ) and k = 1 , . . . , K , ˜ N X j =1 A ( k ) ij X ( k ) j + D ( k ) i f ( X ( k ) i , U ( k ) i , τ ( k ) i , t 0 , t f , p ) =0 (3b) c ( X ( k ) i , U ( k ) i , τ ( k ) i , t 0 , t f , p ) ≤ s, with s ≥ 0 (3c) φ ( X (1) 1 , t 0 , X ( K ) K , t f , p ) =0 (3d) with s ∈ R n g slack variables. The initial gue ss for the AFP will be ˜ Z : = ( ˜ X , ˜ U, p, ˜ τ , t 0 , t f ) , the values of the interpolated solution ˜ z at the collo cation poin ts of the refin ed mesh. E. Pr o p erties of the external constraint hand ling strate gy It is possible to d erive p r oofs of fea sib ility and op timal- ity inv ariance for the removal of constraints on a given discretization mesh. Ho wev er , with the size of the mesh changin g throu ghou t the refinement process, the analy sis of erro rs, and ide n tification of constraint activ ation status (Section II I-B) are all subjec t to consid erable uncer tainties. When a co n straint or con straint set must b e in cluded a gain in the prob lem, it will be ch allenging to ensure that the subsequen t OCP solve can b e supplied with a feasible initial guess. Th e intro duction of the AFP is the answer to this challenge, with its solutio n guar anteed to b e a f easible poin t for th e corre sp onding original OCP . Pr opo sition 1: If the origin al OCP (2) h as feasible poin ts, then a solution to the aux iliary feasibility pro blem (3) will be a feasible p oint of (2) on the same d iscr e tization mesh, and (3) will have correspond ing ob jectiv e value J ∗ = 0 . Pr oof: If Z : = ( X , U, τ , t 0 , t f , p ) is a feasib le p oint of ( 2), then ( 2c) must hold. With s ≥ 0 , th e solutio n for the AFP (3) will be the situation where P s l = 0 , and (2 c) guaran tee s the existence of such a solution. Now , fo r th e very sam e rea so n, we need to obtain a suitable initial g uess for the slack variables s in the AFP . One possible way is by calcu lating the co nstraint vio lation errors o f the interpolated solutions o n the refined m esh. Pr opo sition 2: Define ˜ s ∈ R N × n g as th e absolute local constraint violation er ror ǫ c ( t ) calculated at th e collocation points of the r e fined mesh, with the u pdated initial g uess ˜ Z : = ( ˜ X , ˜ U, p, ˜ τ , t 0 , t f ) . For any set { ¯ s ∈ R n g | ¯ s l ≥ max i =1 ,...,N ( ˜ s i,l ) , l = 1 , . . . , n g } im plemented as the initial guess f or s , the AFP (3) will have a strictly feasible in itial point with respect to th e co nstraints (3 c). Pr oof: ˜ s i,l := | min( − c l ( ˜ X i , ˜ U i , p , ˜ τ i , t 0 , t f ) , 0) | by definition, fo r all i = 1 , . . . , N and l = 1 , . . . , n g , • if c l ( ˜ X i , ˜ U i , p , ˜ τ i , t 0 , t f ) < 0 , i.e. the constraint is satisfied and the solution is not on the bound ary , then ˜ s i,l = 0 , thu s c l ( X i , U i , τ i , t 0 , t f , p ) < ˜ s i,l holds. • if c l ( ˜ X i , ˜ U i , p , ˜ τ i , t 0 , t f ) = 0 (constraint satisfied and solutio n is on the bou ndary ) or c l ( ˜ X i , ˜ U i , p , ˜ τ i , t 0 , t f ) > 0 (con straint violation occu rs), then c l ( X i , U i , τ i , t 0 , t f , p ) = ˜ s i,l holds. Therefo re, c l ( X i , U i , τ i , t 0 , t f , p ) ≤ ˜ s i,l will always be true. From ¯ s l ≥ max i =1 ,...,N ( ˜ s i,l ) , it can be con cluded th at c l ( X i , U i , τ i , t 0 , t f , p ) ≤ ¯ s l holds. W e can now sh ow that, except for the initial so lve, all subsequen t solves will h av e feasible in itial g uesses. Pr opo sition 3: If the unmo dified O CP has f easible points, and the initial solve of the discretized OCP has been succe ss- ful, the n all sub sequent solves of OCPs and AFPs with m esh refinement schemes and the pr oposed external co nstraint handling method w ill have a feasible initial po int with respect to th e constra in ts (2c) or (3 c). Pr oof: For any interpolated solution ˜ Z : = ( ˜ X , ˜ U, p, ˜ τ , t 0 , t f ) on the new mesh, if ( 2c) is no t satisfied, then th e correspo n ding AFP will b e solved and Propo sition 2 ensures th at AFP will have a feasible initial guess. From Proposition 1 the so lution of the AFP will be a fea sib le initial guess for the subsequ ent OCP solve. F . A practically more efficient alternative imp lementation The pro posed external constraint han dling scheme can guaran tee feasible initial points under con ditions stated in Proposition 3 . Ne vertheless, it is not efficient in prac tice . The f requen t solve of AFPs ar e not only time consu m ing, but are o f ten no t necessary . Recall the c o nditions regard ing ideal initial guesses for IPM meth ods. It is no t nece ssary to satisfy prima l a nd dual feasibility — rather, one only need s to be close to fulfillment. In p ractice, the computational p erform ance of a moder n IPM that u ses n ear-feasible in itial guesses is very much compar able to using feasible initial points. In addition, constraint satisfaction for simple bou nds can be computatio nally m u ch easier to achieve by the NLP solver , thus th ere is no need to enf orce tho se thr ough the solve of an AFP . Thus, a practically more e fficient version of the exter- nal ha n dling scheme can be formu lated, by r estricting the condition s for solving the AFP to the M R iteration w h en a po te n tially redu ndant path constra int set turns into a potentially enf orced path constrain t set. I V . E X A M P L E T o demo nstrate the com p utational benefits of the prop osed ECH schem e, we show an p roblem that is relatively large in the horizon len gth. T he task inv olves finding a fuel-op timal flight path o f a comme rcial aircraft wh ere authorities have identified five non- flig ht zones ( NFZ) fo r the aircraft to av oid. From sim p le fligh t mechan ics with a flat earth assumption, both the long itudinal and lateral mo tion of the aircraf t can be describ ed by the d ynamic equ ations ˙ h ( t ) = v T ( t ) sin( γ ( t )) ˙ P OS N ( t ) = v T ( t ) cos( γ ( t )) co s( χ ( t )) ˙ P OS E ( t ) = v T ( t ) cos( γ ( t )) sin ( χ ( t )) ˙ v T ( t ) = 1 m ( t ) ( T ( v C ( t ) , h ( t ) , Γ( t )) − D ( v T ( t ) , h ( t ) , α ( t )) − m ( t ) g sin( γ ( t ))) ˙ γ ( t ) = 1 m ( t ) v T ( t ) ( L ( v T ( t ) , h ( t ) , α ( t )) cos( φ ( t )) − m ( t ) g cos( γ ( t ))) ˙ χ ( t ) = L ( v T ( t ) , h ( t ) , α ( t )) sin ( φ ( t )) cos( γ ( t )) m ( t ) v T ( t ) ˙ m ( t ) = F F ( h ( t ) , v C ( t ) , Γ( t )) with h the a ltitu de [m ], P OS N and P OS E the no rth and east p osition [ m], v T the true airspeed [m/s], γ the flight path ang le [rad ] , χ the tracking ang le [rad] , an d m the m ass [kg]. T , L , D are the thrust, lift an d drag for ces. F F is the fuel flow mo d el, requiring an input o f calibr ated airspeed v C , which can be related to v T via a conversion. 0 2 4 6 8 10 10 5 0 2 4 6 8 10 5 ORG DES 5 2 1 3 4 Fig. 2. The fuel-optimal flight profile for the exampl e problem Additionally , g = 9 . 8 1 m/s 2 is g ravitational acceleration. W e have three control inp u ts, the roll ang le φ in [r ad], the throttle settings Γ nor m alized between 0 and 1, an d the angle of attac k α in [rad] . Further details of the mod elling of a Fokker 50 aircraf t can b e o btained fr o m [14]. The av o idance of NFZs can be implemen ted with the following path con straints ( P OS N ( t ) − P OS N N ) 2 + ( P OS E ( t ) − P OS E N ) 2 ≥ r 2 N with P OS N N and P OS E N the no r th an d east position of the center o f the non -flight zones, an d r N the radius. The prob lem will have the bo undar y c ost Φ( x ( t 0 ) , t 0 , x ( t f ) , t f , p ) = − m ( t f ) ( maximize th e mass at the end o f the flight, with fixed t f = 74 7 5 s), sub ject to th e dynamics and path con straints. Furthermo re, variable simple bound s are imposed togeth er with th e bou ndary cond itions. The OCP is transcrib ed usin g the op timal control software ICLOCS2 [15] with He rmite-Simpson discretization , and solved with I PM-based NLP so lver IPOPT [16] ( versio n 3.12.4 ). All co mputation results shown were o b tained on an Intel Cor e i7-477 0 comp uter with 16 G of RAM. Figure 2 illustrates th e results solved to a user-defined to le r ance. Using th e prop osed external c onstraint h a ndling scheme, we first solved the prob lem with a worst-case buffer interval setting of β = 0 s. The history for co nstraint activ ation inter- vals imp lemented in the OCP are demon strated in T able I. It can be seen that in the initial solve (MR iter ation 1), all constraint sets are e n forced an d all constrain ts a re tr e ated as potentially active. Based only on the solution from th is coarse grid, the ECH meth od co rrectly identified that the constraint sets related to NFZ 2, 3 and 5 are all p otentially redund ant. It also determined that constraints related to NFZ 1 are o nly potentially acti ve near the end of the flight, whereas f o r NFZ 4 they are at the b eginning of the mission . In later iterations o f the M R, these intervals had only some minor ad justments. It can be seen tha t without imp lement- ing any buffer interval, we d o see occasions where active constraints got err oneou sly identified as ina c ti ve fo r finer meshes. Howe ver , the co nstraint violation erro r analysis in the MR process cor rectly id entified these situations and made correction s according ly . T ABL E I E X T E R N A L C O N S T R A I N T H A N D L I N G H I S T O R Y : A I R C R A F T F L I G H T P RO FI L E ( t 0 = 0 S , t f = 7475 S , β = 0 S ) Constraint Activ ati on Intervals Implemented in the OCP [ s ] MR Iteration 1 MR Iteration 2 MR Iteration 3 MR Iteration 4 MR Iteration 5 MR Iteration 6 (K = 40) (K = 81) (K = 136) (K = 176) (K = 207) (K = 256) NFZ 1 [ t 0 , t f ] [6900 7092] [6996 7114] [7056 7162] [7071 7140] [7074 7150] NFZ 2/3/5 [ t 0 , t f ] ∅ ∅ ∅ ∅ ∅ NFZ 4 [ t 0 , t f ] [671 863] [743 942] [767 875] [77 4 880] [774 878] T ABL E II C O M P U TATI O N A L P E R F O R M A N C E C O M PA R I S O N Standard W ith ECH With ECH Solve ( β = 0 s) ( β = 747 . 5 s) T otal Comp. 130.54 92.14 78.27 Time [s] (29% lower) (40% lower) MR Iterations 6 6 6 Re-comp. 21.82 13.50 10.78 Time [s] (38% lower) (50% lower) Fuel Used [kg] 1787.6 1787.6 17 87.6 T able II compar es the comp utational perf o rmance of the standard solve, as well a s solves with e xternal constrain t handling using the alter native ECH implementatio n (allowing near-feasible in itial gu esses) described in Section III- F, with two different buffer in ter val settings. W ith the worst-case setting of β = 0 , th e total comp u tation time saw a 29% reduction , while the n umber of MR iterations r e mained the same. Choosing a much more co nservati ve buffer interval setting of β = 0 . 1( t f − t 0 ) = 747 . 5 s further imp roved this time reductio n to 4 0%, d ue to the fact that initial g u esses were feasible fo r all later MR iterations. For real-time applicatio ns, it is useful to consider the re- computatio n time fo r solv ing the OCP proble m ag ain with the fina l (refined) discre tization mesh, using the obtained solutions as in itial gu e sses. For the ECH meth od with β = 747 . 5 s, th e time taken w as o nly half compa r ed to the standard solve. Th e refore, the b e n efits of the propo sed scheme can b e seen for b oth off-line an d online app lications. V . C O N C L U S I O N S A strategy h a s been developed to system atically identify and hand le inactive constraints and red undan t co nstraint sets for numerically solvin g op timal con trol p roblems togethe r with mesh refinem ent sche m es. Unlike pr evious work tha t would always result in infeasible initial guesses for inter- mediate steps, th e pro posed scheme is capable of p rovid- ing g uarantees on th e feasibility of in itial poin ts in mesh refinement iterations. Th e method only re quires some mild condition s — the origin al OCP to h ave feasib le po ints, and the initial solve of the discre tized OCP to be su c cessful, making it particu larly suitable f or OCP toolbo xes that utilize IPM-based NLP solvers in lowering the computatio nal cost. Due to limitatio ns in time an d space, we o n ly illustrated the pr oposed extern al constraint h andling m ethod with di- rect collocatio n. W e note that similar benefits should be obtainable , af ter som e ad aptations, with o ther simultaneou s methods, su ch as direct multiple shooting. This m ig ht also be possible for sequential m ethods, such as d irect single shooting. Moreover , it would b e inte r esting to test a slightly altered version o f our pro posed co n straint r emoval meth o d with activ e-set based NLP solvers — this could be com pared under a mesh refinemen t sch eme against ear lier work [2 ], which explo its constraint add ition instead. R E F E R E N C E S [1] L. T . Biegle r , “ An overvi e w of simultaneo us strategie s for dynamic optimiza tion, ” Chemical Engineering and Proc essing: Process Inten- sificati on , vol. 46, no. 11, pp. 1043–1053, 2007. [2] H. Chung, E. Polak, and S. Sastry , “ An externa l acti ve-set strategy for solving optimal contro l problems, ” IEEE T ransactions on Automatic Contr ol , vol. 54, no. 5, pp. 1129–1133, 2009. [3] J. Gondzio, “Crash start of interior point methods, ” E ur opean Journal of Operation al Researc h , vol. 255, no. 1, pp. 308–314, 2016. [4] M. Jost, G. Pannocchia , and M. M ¨ onnigmann, “Constraint remov al in linear mpc: An improv ed criterion and complexi ty analysis, ” in Eur opean Contr ol Confer ence (ECC) , pp. 752–757, IEEE, 2016. [5] M. Jost, G. Pannocch ia, and M. M ¨ onnigmann, “ Accele rating tube- based model predicti ve control by constrai nt remov al., ” in 54th IEEE Confer ence on Decision and Contr ol (CDC) , pp. 3651–3656, 2015. [6] R. Dyrska, , and M. M ¨ onnigmann, “ Accelerat ing nonlinear model pre- dicti ve control by constraint remov al, ” in Proc. 6th IF AC Confer ence on Nonlinear Model Predi ctive Contr ol , 2018. [7] J. T . Betts, Practical Methods for Optimal Contr ol and Estimation Using Nonline ar Pro gramming : Second Edition . Advance s in Design and Control, Society for Industrial and Applied Mathemat ics, 2010. [8] F . Fahro o and I. M. Ross, “ Adv ances in pseudospectral methods for optimal control, ” in A IAA guidance , navigation and contr ol confer ence and exhibi t , p. 7309, 2008. [9] F . L iu, W . W . Hager , and A. V . Rao, “ An hp mesh refinement method for optimal control using discontinuity detecti on and mesh size reducti on, ” in 53th IEE E Confer ence on Decision and Contr ol (CDC) , pp. 5868–5873, IEEE, 2014. [10] A. V . Fiacco and G. P . McCormick, “Programming under nonlinea r constrai nts by unconstrained minimizati on: a primal-dua l method, ” tech. rep., Research Analysis Corp Mclean V A , 1963. [11] A. V . Fiacco and G. P . McCormick, “The sequenti al unconstra ined minimizat ion technique for nonline ar programing, a primal-dual method, ” Manageme nt Science , vol. 10, no. 2, pp. 360–366, 1964. [12] A. V . Fiacco and G. P . McCormic k, “Extensions of SUMT for nonlin- ear programming: equality constraints and extrapola tion, ” Manag ement Scienc e , vol. 12, no. 11, pp. 816–828, 1966. [13] S. Mehrotra , “On the implementat ion of a primal-dual interior point method, ” SIAM J ournal on optimization , vol. 2, no. 4, pp. 575–601, 1992. [14] Delft Unive rsity of T echnology , P erformance Model F okker 50 , 2010. [15] Y . Nie, O. J. Faqir , and E. C. Ker rigan, “ICLOCS2: Solve your optimal control problems with less pain, ” in Pro c. 6th IF AC Confer ence on Nonline ar Model Pred ictiv e Contr ol , 2018. [16] A. W ¨ achter and L. T . Biegle r , “On the implementati on of an interi or- point filter line-search algorithm for large -scale nonlinea r program- ming, ” Mathemat ical pro gramming , vol. 106, no. 1, pp. 25–57, 2006.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment