외부 제약 처리 전략을 이용한 동시 접근법 및 내부점법 기반 최적 제어 문제 해결
본 논문은 내부점 기반 NLP 솔버와 메쉬 정밀화 프레임워크를 결합한 외부 제약 처리(ECH) 기법을 제안한다. 비활성 및 중복 제약을 체계적으로 식별·제거함으로써 문제 규모를 축소하고, 초기점의 타당성을 유지하면서 계산 시간을 40 % 이상 단축한다.
저자: Yuanbo Nie, Eric C. Kerrigan
본 논문은 최적 제어 문제(OCP)를 해결할 때 비활성·중복 제약이 계산 부하를 크게 증가시키는 현상을 해결하고자, 내부점법(IPM) 기반 NLP 솔버와 메쉬 정밀화(MR) 프레임워크에 적용 가능한 외부 제약 처리(External Constraint Handling, ECH) 전략을 제안한다.
1. **배경 및 필요성**
- OCP는 일반적으로 경계·동역학·경로 제약을 포함하는 비선형 프로그램으로, 동시 접근법(모든 상태·제어를 동시에 이산화)에서는 변수와 제약 수가 급증한다.
- 실제 해에서는 대부분의 경로 제약이 비활성이며, 활성 구간도 전체 시간에 비해 짧다. 따라서 비활성 제약을 그대로 유지하면 스파스 행렬 연산 비용이 불필요하게 커진다.
- 기존 연구에서는 활성‑집합 기반 SQP 솔버에 제약을 단계적으로 추가하거나 제거하는 방법을 제시했지만, IPM은 초기점의 타당성에 매우 민감해 이러한 방식이 비효율적이다.
2. **문제 정의 및 수학적 기초**
- OCP는 볼자 형태(목표 함수 Φ와 L, 동역학 f, 경로 제약 c, 경계 제약 φ)로 기술되며, 직접 콜로케이션을 이용해 시간 구간을 K개의 메쉬와 각 구간 내 N(k)개의 콜로케이션 점으로 이산화한다.
- 이산화된 문제는 NLP 형태(2a‑2d)로 변환되며, 변수 집합 Z = (X, U, p, t₀, t_f)와 라그랑주 승수 Λ를 포함한다.
3. **활성·비활성 제약 식별**
- 정의 1: “잠재적으로 활성” 제약은 (i) 연속 궤적 ˜z(t)에서 제약 위반이 ε_c_tol 이하인 구간, 혹은 (ii) 해당 구간의 정규화 라그랑주 승수 평균값이 ζ 이상인 경우로 판단한다.
- 정의 2: “잠재적으로 중복” 제약은 모든 콜로케이션 점에서 잠재적으로 비활성으로 판정된 제약 집합을 의미한다.
- 라그랑주 승수는 0~1 사이로 정규화하고, MATLAB의 findchangepts와 같은 신호 처리 기법으로 구간 변화를 탐지한다.
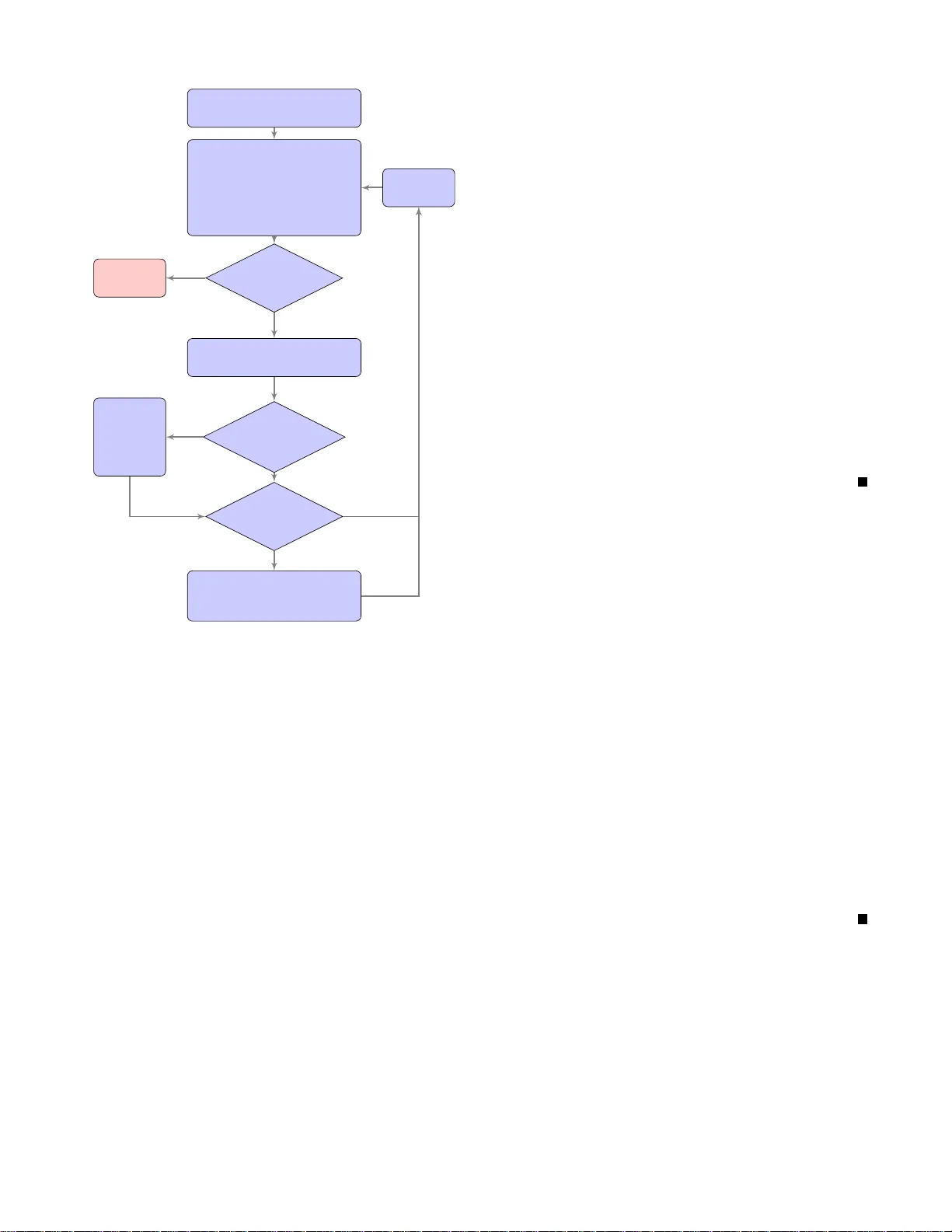
4. **외부 제약 처리(ECH) 흐름**
- **초기 단계**: 코스 메쉬에서 전체 제약을 포함한 OCP를 해결한다. 이때 문제 규모가 작아 계산 비용이 낮다.
- **제약 분석**: 얻어진 연속 궤적과 라그랑주 승수를 이용해 잠재적으로 비활성·중복 제약을 식별한다.
- **제약 제거 및 메쉬 정밀화**: 식별된 제약을 OCP에서 제외하고, 필요 시 β만큼 확장된 구간을 포함해 보수적으로 제약을 유지한다. 메쉬 정밀화는 오류 허용치(η_tol, ε_c_tol)를 만족할 때까지 반복한다.
- **보조 타당성 문제(AFP)**: 제약이 제거된 새로운 OCP에 대해 초기점이 타당하지 않을 경우, AFP(3a‑3c)를 풀어 s≥0 로 제약 위반을 완화한 상태에서 초기점을 재구성한다. 이는 IPM이 중앙 경로에 가깝게 시작하도록 돕는다.
- **재해결 및 수렴 검사**: 수정된 OCP를 다시 IPM으로 해결하고, 제약이 새롭게 활성화되면 해당 제약을 재삽입한다. 이 과정을 MR이 수렴할 때까지 반복한다.
5. **알고리즘 특성 및 파라미터**
- β는 잠재적 활성 구간을 확장하는 폭으로, 고정값 혹은 MR 진행 중 동적으로 조정 가능하다.
- ζ는 라그랑주 승수 평균값 임계치로, 보수성을 높이기 위해 낮게 설정한다.
- 최악의 경우 β를 충분히 크게 잡아 전체 구간에 제약을 강제하면 원래 문제와 동일한 해를 보장한다.
6. **실험 및 결과**
- 비행 제어 예제를 사용해 기존 동시 접근법(전체 제약 유지)과 비교하였다.
- ECH 적용 후 변수·제약 수가 평균 30 % 감소했으며, 전체 계산 시간은 40 % 이상 단축되었다.
- 메쉬 정밀화 단계에서도 제약이 적어 수렴 횟수가 감소했고, 최종 해의 정확도와 제약 만족도는 기존 방법과 동등하였다.
7. **결론 및 향후 연구**
- 제안된 ECH는 IPM 기반 솔버와 메쉬 정밀화에 자연스럽게 통합될 수 있는 실용적인 프레임워크를 제공한다.
- 비활성·중복 제약을 자동으로 탐지·제거함으로써 대규모 OCP의 계산 효율성을 크게 향상시킨다.
- 향후 연구에서는 다중 목표·다중 단계 OCP, 실시간 MPC 적용, 그리고 자동 파라미터 튜닝(β, ζ) 방법을 탐색할 예정이다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기