Linear Parameter-Varying Control of Nonlinear Systems based on Incremental Stability
The Linear Parameter-Varying (LPV) framework has long been used to guarantee performance and stability requirements of nonlinear (NL) systems mainly through the $\mathcal{L}_2$-gain concept. However, recent research has pointed out that current $\mat…
Authors: P.J.W. Koelewijn, R. Toth, H. Nijmeijer
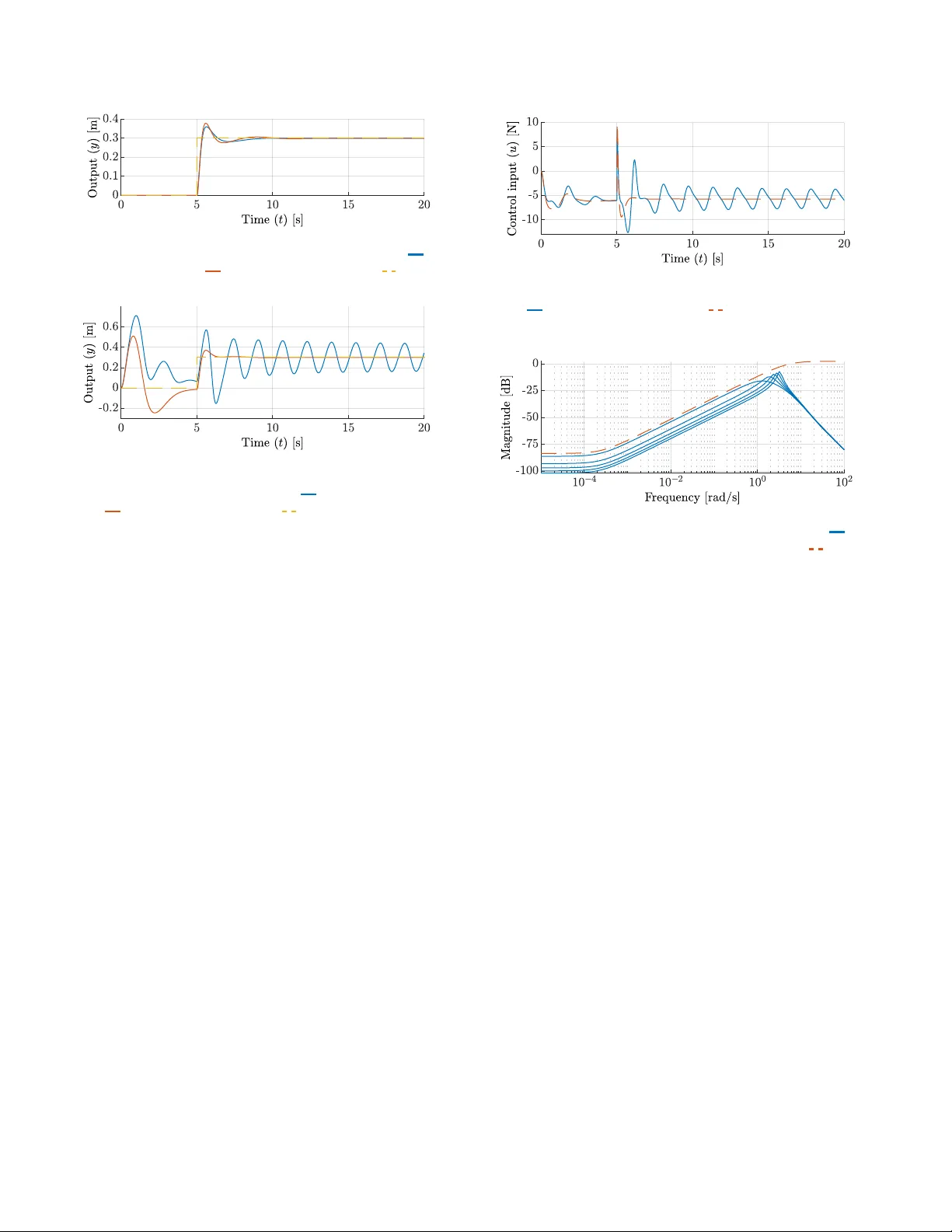
Linear P arameter-V arying Con trol of Nonlinear Systems based on Incremen tal Stabilit y ? P .J.W. Ko elewijn ∗ R. T´ oth ∗ H. Nijmeijer ∗∗ ∗ Contr ol Systems Gr oup, Dep artment of Ele ctric al Engine ering, ∗∗ Dynamics and Contr ol Gr oup, Dep artment of Me chanic al Engine ering, Eindhoven University of T e chnolo gy, 5612 AE, Eindhoven, The Netherlands, (e-mail: { p.j.w.ko elewijn, r.toth, h.nijmeijer } @tue.nl). Abstract: The Linear P arameter-V arying (LPV) framew ork has long been used to guarantee p erformance and stability requirements of nonlinear (NL) systems mainly through the L 2 -gain concept. Ho wev er, recent research has p ointed out that current L 2 -gain based LPV syn thesis metho ds can fail to guaran tee these requiremen ts if stabilization of a non-zero operating condition (e.g. reference trac king, constant disturbance rejection, etc.) is required. In this pap er, an LPV based synthesis metho d is prop osed whic h is able to guaran tee incremen tal p erformance and stabilit y of an NL system even with reference and disturbance rejection ob jectiv es. The dev elop ed approac h and the current L 2 LPV syn thesis metho d are compared in a simulation study of the p osition control problem of a Duffing oscillator, showing p erformance improv ements of the prop osed metho d compared to the current L 2 -based approach for tracking and disturbance rejection. Keywor ds: Nonlinear Systems, Stability and Stabilization, Optimal Con trol 1. INTR ODUCTION The Linear Parameter-V arying (LPV) framew ork has b een dev elop ed in order to guarantee stabilit y and p erformance requiremen ts for nonlinear (NL) systems by extending the w ell-known synthesis results on guaranteeing these require- men ts for Linear Time-Inv ariant (L TI) systems, such as H ∞ -con trol, see e.g. (P ac k ard, 1994; Apk arian et al., 1995; W u, 1995; Scherer, 2001) for some of the LPV synthesis results. It w as though t that these results naturally extended the guaran tees on trac king and disturbance rejection for NL systems through the LPV em b edding concept. Ho w ever, as exemplified in (Scorletti et al., 2015), this is not completely true. In (F romion et al., 1999, 2001; Scorletti et al., 2015) it is p ointed out that a differen t notion of stability is required in order to also guarantee tracking and rejection require- men ts for NL systems, namely , the notion of incremental L 2 -gain stability as opp osed to L 2 -gain stability that is curren tly used for LPV con troller syn thesis. Whereas the notion of L 2 -gain stability only guaran tees stabilit y with resp ect to the origin of the system, incre- ? This work has received funding from the Europ ean Research Council (ERC) under the European Unions Horizon 2020 re- search and innov ation programme (grant agreement No 714663). The results provided in this pap er are the first steps to wards incremen- tal stability based LPV synthesis and further extensions and analysis is provided in Koelewijn et al. (2019). men tal stabilit y guaran tees stabilit y with resp ect to other tra jectories. This notion of stabilit y is therefore esp ecially relev an t for tracking and disturbance rejection, where the system has a non-zero operating condition. Similar notions to that of incremental stability were also developed, suc h as con vergence, see (P avlo v et al., 2004), and contraction, see (Lohmiller and Slotine, 1998). In the NL literature, v arious controller design metho ds hav e b een developed to guaran tee con vergence and contraction, see e.g. (Pa vlo v et al., 2007; Lohmiller and Slotine, 2000). Ho wev er, the resulting syn thesis metho ds rely on complex procedures re- quiring exp ert knowledge in order to construct a stabilizing con troller and allow no possibility for p erformance shaping, compared to LPV syn thesis metho ds that offer pow erful shaping paradigms. A first attempt to guarantee incremen tal p erformance and stabilit y of an NL system through the LPV framework was prop osed in (Scorletti et al., 2015). A short coming of this metho d is that it can only b e used for a sub class of NL con trol problems, namely “filter cancelation con trol pro- blems”. Moreo ver, the pro cedure requires a sp ecific synthe- sis metho d to b e used, resulting in a linear controller where sc heduling-v ariable is only in an additiv e relationship with the controller input, limiting the obtainable p erformance. Therefore, as main con tribution of this pap er, a syn thesis metho d is prop osed that is able to guarantee incremental stabilit y and p erformance through the LPV framework for NL systems. The prop osed metho d can b e used for a larger class of NL con trol problems and systems. F urthermore, it allows the flexibility of using existing LPV synthesis metho ds during the syn thesis procedure. The pap er is structured as follows. In Section 2, a formal problem definition is giv en. Section 3 describ es the proposed solution. In Section 4, the proposed synthesis method is applied to the p osition control problem of an NL Duffing oscillator. Finally , in Section 5, conclusions are drawn on the dev elop ed results. Notation R is the set of real n umbers, while R + ⊂ R is the set of non-negative reals. L q 2 is the space of square in tegrable real v alued functions R + → R q , with the norm k f k 2 = q R ∞ 0 k f ( t ) k 2 dt , where k ? k is the Euclidean (v ector) norm. A function is of class C n if its first n deriv ativ es exist and are contin uous. L C q n denotes the set of all L q 2 functions that are in C n . The identit y matrix of size N is denoted by I N . The op erator ◦ denotes the comp osition of t w o functions, i.e. f ◦ g = f ( g ). 2. PR OBLEM ST A TEMENT Consider a dynamical system given by Σ : ˙ x ( t ) = f ( x ( t ) , w ( t )) ; z ( t ) = h ( x ( t ) , w ( t )) ; x (0) = x 0 ; (1) where x ( t ) ∈ R n x with x 0 ∈ X ⊆ R n x is the state v ariable asso ciated with the considered state-space represen tation of the system, w ∈ R n w is the generalized disturbance, and z ∈ R n z is the p erformance output of the system. X is con- sidered to b e a compact set, while f and h are assumed to b e b ounded and sufficien tly smo oth maps R n x × R n w → R n x and R n x × R n w → R n z suc h that tra jectories are unique and forw ard complete for all initial conditions x 0 ∈ X and for all input functions w ∈ L n w 2 . Driven by the classical generalized plan t concept, w corresp onds, as aforementioned, to the generalized disturbance channels (e.g. reference, external load, etc.) for which the performance of the systems is c haracterized b y z (e.g. trac king error, actuator usage, etc.). As men tioned in the introduction, the curren t notion of stabilit y used to guarantee stabilit y and p erformance re- quiremen ts of NL systems through the LPV framew ork is that of L 2 -gain stability . F or a dynamical system (1), the notion of L 2 -gain is given by the follo wing definition. Definition 1. ( L 2 -gain). Σ, given by (1), is said to b e L 2 - gain stable if for all w ∈ L n w 2 and x 0 ∈ X , Σ( w ) exists and there is a finite γ ≥ 0 and a b ounded function ζ ( x ) ≥ 0 with ζ (0) = 0 such that k Σ( w ) k 2 ≤ γ k w k 2 + ζ ( x 0 ) . (2) The induced L 2 -gain of Σ, denoted by k Σ k 2 , is the infimum of γ such that (2) still holds. As exemplified in (Scorletti et al., 2015), this notion of stabilit y is not able to guarantee trac king and rejection re- quiremen ts for NL systems, as the L 2 -gain only guaran tees stabilit y and p erformance with resp ect to the origin. When p erforming reference tracking and disturbance rejection, the system is in a non-zero operating condition, hence, L 2 -gain stabilit y is not the prop er notion to use to also guarantee these requiremen ts. Therefore, a different notion of stabilit y has to b e used, namely the notion of incremen tal stabilit y . The notion of incremen tal stability was first introduced in (Zames, 1966) to provide conditions on contin uity and stabilit y of NL systems. F or a dynamical system given b y (1) the incremental-gain is given by the following defin tion. Definition 2. (Incremen tal gain). Σ, given b y (1), is said to b e incrementally L 2 -gain stable, from now on denoted as L i2 -gain stable, if it is L 2 -gain stable and, there exist a finite η ≥ 0 and a function ζ ( x, ˜ x ) ≥ 0 with ζ (0 , 0) = 0 such that k Σ( w ) − Σ( ˜ w ) k 2 ≤ η k w − ˜ w k 2 + ζ ( x 0 , ˜ x 0 ) , (3) for all w, ˜ w ∈ L n w 2 and x 0 , ˜ x 0 ∈ X . The induced L i2 -gain of Σ, denoted by k Σ k i2 , is the infimum of η suc h that (3) holds, (F romion and Scorletti, 2003). Based on this definition, L i2 -gain stability ensures conv er- gence of system tra jectories with resp ect to each other, whereas L 2 -gain stabilit y , as defined in Definition 1 can only ensure conv ergence with resp ect to one fixed point, e.g. the origin. Therefore, L i2 -gain stabilit y can be used to also guarantee tracking and rejection requirements. In case an L TI system is considered, L 2 -gain stabilit y and L i2 -gain stability are equiv alent (whereas this is not the case for NL systems), see (Ko elewijn and Tth, 2019) for a pro of. Consequently , the notion of L 2 -gain c an be used to guarantee tracking and rejection requiremen ts for L TI systems. Besides L i2 -gain stability , similar stability notions w ere also developed, namely con traction, see (Lohmiller and Slotine, 1998), and con vergence, see (P avlo v et al., 2004). One w a y to assess the incremen tal stabilit y of a dynamical system giv en by (1) is by using the notion of the Gteaux derviativ e of a system, first prop osed in (F romion and Scorletti, 2003). Definition 3. (Gˆ ateaux deriv ative). Let Σ defined b y (1), b e suc h that f and h are C 1 . F or a given input tra jectory w r ∈ L n w 2 and initial condition x 0 ∈ X , let x r ( t ) b e the solution of (1) for input w r and x r (0) = x 0 . The Gˆ ateaux deriv ativ e of Σ is defined w.r.t. ( w r , x 0 ) as δ Σ [ w r ,x 0 ] : δ ˙ x ( t ) = A ( t ) δ x ( t ) + B ( t ) δ w ( t ); δ z ( t ) = C ( t ) δ x ( t ) + D ( t ) δ w ( t ); δ x (0) = δ x 0 ; (4) with A ( t ) = ∂ f ∂ x ( x r ( t ) , w r ( t )), B ( t ) = ∂ f ∂ w ( x r ( t ) , w r ( t )), C ( t ) = ∂ h ∂ x ( x r ( t ) , w r ( t )), D ( t ) = ∂ h ∂ w ( x r ( t ) , w r ( t )) b e b ounded functions, ( δ w , δ x, δ z ) ∈ ( L n w 2 × L n x 2 × L n z 2 ) and δ x 0 ∈ R n x , (F romion and Scorletti, 2003). F rom now on, a system giv en by (4) will be referred to as the incremen tal form of the NL system (1), while the original NL system will be referred to as the primal form. Using this definition, the follo wing theorem is given in (F romion and Scorletti, 2003) to assess the incremental stability of an NL system. The or em 4. Let Σ, as defined in (1), b e Gˆ ateaux differen- tiable in terms of Definition 3, meaning that δ Σ [ w r ,x 0 ] exists for an y w r ∈ L n w 2 and x 0 ∈ X . Then, k Σ k i2 ≤ η , if and only if δ Σ [ w r ,x 0 ] 2 ≤ η for an y w r ∈ L n w 2 and x 0 ∈ X . F or a pro of see (F romion and Scorletti, 2003). In short, un- der our assumptions, the induced L 2 -gain of the incremental form of system is equal to the induced L i2 -gain of the primal form of the system. In (Scorletti et al., 2015), Theorem 4 is used in conjunction with the LPV framework to make the first steps tow ard synthesizing con trollers ensuring in- cremen tal stabilit y of NL systems. In this paper, it is proposed that using Theorem 4, instead of directly synthesizing a controller guaranteeing L i2 -gain stabilit y for an NL system, standard ( L 2 ) LPV synthesis can be p erformed on the (LPV embedded) incremental form of the system. This results in the incremental form of an LPV controller, which then needs to b e transformed bac k to the its primal form in order to b e used with the NL system. Doing this transformation is an issue also encoun tered in previous work. In (Scorletti et al., 2015) this issue is circum v ented by synthesizing a con troller whic h has an additiv e dependency on the sc heduling-v ariable, i.e. an L TI controller which has as an input the sc heduling- v ariable. Because the incremen tal form and primal form of an L TI system are equiv alen t, no transformation is required to obtain the primal form of the con troller. In this paper we prop ose a new metho d in order to realize the primal form of the controller based on the synthesized incremental form of the LPV con troller. 3. INCREMENT AL LPV CONTROLLER 3.1 Main Conc ept T o formulate a control synthesis problem, the NL system is considered to hav e the form of a generalized plan t: P : ˙ x = f ( x ( t ) , u ( t )) + B 1 w ( t ) z = h 1 ( x ( t ) , u ( t )) + D 11 w ( t ) y = h 2 ( x ( t )) + D 21 w ( t ) (5) where y ∈ R n y is the measured output and u ∈ R n u the con trol input of the system, while w and z retain their roles in characterizing the p erformance channels. The functions f , h 1 and h 2 are considered to b e C 1 suc h that the Gˆ ateaux deriv ativ e of (5) exists. The main concept b ehind our proposed pro cedure is as follo ws: (1) Compute the incremental form of the nonlinear system (5); (2) The incremental form of the system is then em b edded in an LPV representation. F or this LPV mo del, a con troller is synthesized which ensures a minimal L 2 - gain of the in terconnection of the con troller and plant from δ w to δ z , which b y Theorem 4 ensures L i2 - gain stability of interconnection of the primal form and (to b e constructed) primal form of the controller from w to z . This step can b e accomplished b y using standard syn thesis pro cedures in the LPV framew ork, e.g. see (P ack ard, 1994; Apk arian et al., 1995; W u, 1995; Sc herer, 2001). This step will b e referred to as the incr emental synthesis step; (3) Finally , the synthesized con troller of the previous step, whic h is in its incremental form, is realized back to its primal form for it to b e use d with the NL system. This step will b e referred to as the c ontr ol ler r e alization step. 3.2 Incr emental form c omputation As a first step in the pro cedure, the incremental form of the NL syste m (5) is computed based on the Gˆ ateaux deriv ativ e. This results in a system of the form δ P [ u r ,x 0 ] : δ ˙ x ( t ) = ¯ A ( x r ( t ) , u r ( t )) δ x ( t ) + B 1 δ w ( t ) + ¯ B 2 ( x r ( t ) , u r ( t )) δ u ( t ); δ z ( t ) = ¯ C 1 ( x r ( t ) , u r ( t )) δ x ( t ) + D 11 δ w ( t ) + ¯ D 12 ( x r ( t ) , u r ( t )) δ u ( t ); δ y ( t ) = ¯ C 2 ( x r ( t )) δ x ( t ) + D 21 δ w ( t ); δ x (0) = δ x 0 ; (6) where δ x is the incremen tal state, δ u is the incremental con trol input, δ y is the incremental measured output, δ w is the incremental generalized disturbance and δ z is the incremen tal p erformance output. F urthermore, ¯ A ( x r , u r ) = ∂ f ∂ x ( x r , u r ), ¯ B 2 ( x r , u r ) = ∂ f ∂ u ( x r , u r ), ¯ C 1 ( x r , u r ) = ∂ h 1 ∂ x ( x r , u r ), ¯ D 12 ( x r , u r ) = ∂ h 1 ∂ u ( x r , u r ) and ¯ C 2 ( x r , u r ) = ∂ h 2 ∂ x ( x r , u r ). Moreo ver, it is assumed that this interconnection is w ell- p osed. 3.3 Incr emental synthesis T o synthesize an LPV con troller, the incremental form of the plan t δ P is embedded in an LPV representation. Em- b edding the incremental form (6) in an LPV representation results in δ P LPV : δ ˙ x ( t ) = A ( ρ ( t )) δ x ( t ) + B 1 δ w ( t ) + B 2 ( ρ ( t )) δ u ( t ); δ z ( t ) = C 1 ( ρ ( t )) δ x ( t ) + D 11 δ w ( t ) + D 12 ( ρ ( t )) δ u ( t ); δ y ( t ) = C 2 ( ρ ( t )) δ x ( t ) + D 21 δ w ( t ); δ x (0) = δ x 0 ; (7) where ρ ( t ) ∈ P ⊂ R n ρ is assumed to b e measurable and P is c hosen to b e a conv ex set. Moreov er, there exists a function ψ : R n x × R n u → R n ρ , such that ρ ( t ) = ψ ( x r ( t ) , u r ( t )) and it is assumed that x r ∈ X ⊂ R n x and u r ∈ U ⊂ R n u suc h that ψ ( X , U ) ⊆ P . Therefore, we ha ve the relations ¯ A = A ◦ ψ , ¯ B 2 = B 2 ◦ ψ , etc. Sev eral methods for em bedding exists, see e.g. (Kwiatko wski et al., 2006; T´ oth, 2010). Em b edding of (6) is straightforw ard as it is already in a factorized form. Based on (7), a controller is synthesized. F or this part, L 2 -gain based LPV syn thesis pro cedures can b e used, suc h as grid-based, p olytopic, or LFT LPV syn thesis techniques, e.g. (Pac k ard, 1994; Apk arian et al., 1995; W u, 1995; Scherer, 2001). Syn thesizing a controller for (7) that ensures a certain L 2 - gain stabilit y and p erformance b ound on the closed-lo op in terconnection of (7) and the syn thesized con troller results in an LPV controller δ K . This LPV controller δ K is of the form δ K : δ ˙ x k ( t ) = A k ( ρ ( t )) δ x k ( t ) + B k δ u k ( t ); δ y k ( t ) = C k ( ρ ( t )) δ x k ( t ) + D k δ u k ( t ); (8) whic h will be referred to as the incremental form of the con troller 1 , where δ x k ( t ) ∈ R n x k , δ u k ( t ) ∈ R n u k and δ y k ( t ) ∈ R n y k are the states, inputs and outputs of the con troller, respectively . The in terconnection of controller and plan t is such that δ u = δ y k and δu k = δ y . Based on this synthesis step, it is then ensured that the closed-lo op in terconnection of the (incremen tal form of the) con troller δ K and the incremen tal form of the plan t δ P is L 2 -gain stable for any ρ ( t ) ∈ P . Consequently , as p er Theorem 4, this guarantees the L i2 -gain stability of the primal form of the generalized plant P in terconnect with the to b e constructed primal form of the controller (denoted by K ) for all ρ ( t ) ∈ P , i.e. for all tra jectories ( x, u ) that remain in ( X × U ). Note that due to the fact that incremental stabilit y ensures contraction of the state tra jectories of the closed-lo op system, hence, theoretically ( x, u ) is guaran teed to remain in ( X × U ) under w ( t ) ≡ 0. How ev er for w ( t ) 6 = 0, it has to be v erified p osteriori that ( x, u ) remain in ( X × U ), i.e. all ρ ( t ) remain in P , which is a limitation due to the use of the LPV framew ork. 3.4 Contr ol ler r e alization In order to realize the primal form of the controller K , based on its incremental form δ K in (8), concepts related to v elo cit y based linearizations are used. Under the restriction of considered solutions to w ∈ L C n w 1 , u ∈ L C n w 1 , y ∈ C 1 and z ∈ C 1 the velocity based linearization of a system, see (Leith and Leithead, 1999), is equiv alen t with the Gˆ ateaux deriv ativ e of a system (4), the incremental form of a system can then b e expressed b y an interconnection of the primal form and integrators and differen tiators. This relation can then b e exploited to construct the controller as is sho wn by means of the follo wing steps (also display ed in Fig. 1): (1) Assume that an incremental form of the controller δ K is synthesized for incremental form of the plan t δ P using the pro cedures in Sections 3.2 and 3.3; (2) The incremen tal form of the plant δP is then realized b y , in tegrating the input of the primal form P and differen tiating the output; (3) The in tegrator and differentiator are then mo ved to the side of the controller δ K . 1 Note that it is assumed that B k and D k are independent of the scheduling-v ariable, which needs to b e ensured during synthesis. This property is exploited during the c ontr ol ler r e alization step. δ P δ K δ w δ z y δ u δ k δ u k δ y δ K δ w δ z y δ u δ k δ u k δ y R dt d P δ P δ K R dt d P w z y u k y k u k u k δu k δy w z y u K (1) (2) (3) w z y u (4) k y P K Fig. 1. Controller realization step. (4) As the action of differentiation is problematic for noisy measuremen ts, the ov erall controller is realized based on LPV realization theory . This results in the primal form K of the controller where the in tegration and differen tiation action are embedded in the con troller. T o realize the primal form of the controller for the fourth step, the integrator and differen tiator together with the incremen tal form of the controller δ K are realized in one structure. T o ac hieve this, the inputs of the controller need to be differen tiated and the outputs need to be integrated, this results in the following relation ξ y k = δ y k , ξ u k = δ u k , (9) where ξ denotes the op erator ξ = ∂ ∂ t (note that this op erator is non-commutativ e). Using this relation together with (8) results in ξ δ x k = A k ( ρ ) δ x k + B k ξ u k ; ξ y k = C k ( ρ ) δ x k + D k ξ u k ; (10) W e will first rewrite the first equation of (10), by using that ( ξ B k ) u k = 0, as ξ δ x k = A k ( ρ ) δ x k + B k ξ u k + ( ξ B k ) u k , ξ ( δ x k − B k u k ) = A k ( ρ ) δ x k , (11) w e then define ˜ x k = δ x k − B k u k , resulting in ξ ˜ x k = A k ( ρ ) ˜ x k + A k ( ρ ) B k u k , ˙ ˜ x k = A k ( ρ ) ˜ x k + A k ( ρ ) B k u k . (12) A similar procedure can be applied to the second equation of (10) in order to obtain ˙ ˆ x k = C k ( ρ ) ˜ x k + C k ( ρ ) B k u k , (13) where ˆ x k = y k − D k u k . These t wo results can then b e com bined to obtain the complete controller K , resulting in ˙ ˜ x k ˙ ˆ x k y k = A k ( ρ ) 0 A k ( ρ ) B k C k ( ρ ) 0 C k ( ρ ) B k 0 I D k ˜ x k ˆ x k u k , (14) whic h will b e referred to as an L i2 (gain optimal) LPV con troller or an incremental LPV con troller 2 . Note that while the incremental LPV controller naturally has integral action, this is not the (only) cause of the improv ed trac king and rejection performance. In Scorletti et al. (2015) it is demonstrated that even an ( L 2 based) LPV controller with explicit integral action can fail to guarantee tracking and disturbance rejection requirements. 4. EXAMPLE In this section, the L i2 LPV controller synthesis metho d as describ ed in the last section will b e demonstrated with the p osition control problem of a Duffing oscillator. First, a standard L 2 -gain LPV controller design will be syn thesized, for which it will be sho wn that it can fail to adhere to the trac king and rejection requirements when a constan t input disturbance is applied. 4.1 Duffing Oscil lator Dynamics A Duffing oscillator is a mass-spring-damp er system which has a spring that generates a restoring force whic h is a cubic function of its displacement. The dynamics of a Duffing oscillator can b e represented by the following NL state- space equations ˙ x 1 ( t ) = x 2 ( t ); ˙ x 2 ( t ) = − k 1 m x 1 ( t ) − k 2 m ( x 1 ( t )) 3 − d m x 2 ( t ) + 1 m u ( t ); y ( t ) = x 1 ( t ); (15) where the (physical) parameters are the mass m = 1 [kg ], the linear spring constant k 1 = 0 . 5 [N · m − 1 ], nonlinear spring constan t k 2 = 5 [N · m − 3 ] and damping co efficien t d = 0 . 2 [N · s · m − 1 ]. 4.2 L 2 -gain LPV Synthesis F or L 2 -gain LPV synthesis, (15) is embedded in an LPV represen tation, resulting in the follo wing LPV mo del ˙ x 1 = x 2 ; ˙ x 2 = − k 1 m − k 2 m ρ x 1 − d m x 2 + 1 m u ; y = x 1 ; (16) where ρ = y 2 is the sc heduling-v ariable, with ρ ∈ P = [0 , 2], allo wing a relativ ely large op erating range. 2 Due to the realization concept one can argue that stability and performance guaran tees only apply to the primal closed-loop system if the signal tra jectories are guaran teed to b e in C 1 . How ever, as the Gˆ ateaux deriv ativ e of the closed-lo op is the in terconnection of (6) and (8), hence, in terms of Theorem 4, L i2 stability and performance holds without any restrictions. K G 3 W 1 W 2 W u i d 1 z 2 z y r + + + − Fig. 2. Generalized plan t. Based on the LPV mo del representation of the system, a generalized plan t is constructed in order to ac hieve output reference tracking and input disturbance rejection. The generalized plan t is shown in Fig. 2, where r and d i are the reference and input disturbance resp ectively , together forming the disturbance channel w ; z 1 and z 2 denote the p erformance channels; and u and y denote the control input and measured output of the generalized plan t re- sp ectiv ely . The weigh ting filter W 1 is designed with low- pass characteristics in order to ha v e sufficient trac king p er- formance at lo w frequencies, and has as transfer function W 1 ( s ) = 0 . 5012 s +2 . 506 s +2 . 506 · 10 − 4 . The weigh ting filter W 2 is designed with high-pass c haracteristics in order to hav e roll-off at high frequencies for the control input, and has as transfer function W 2 ( s ) = 10 s +800 s +8 · 10 4 . Finally , the weigh ting filter W 3 is c hosen as a constant gain, giv en b y W 3 = 1 . 5. Using this generalized plan t, an L 2 -gain optimal LPV con- troller is syn thesized using the p olytopic synthesis method based on (Apk arian and Adams, 1998) where for the quadratic stability and p erformance condition, X is consid- ered parameter-v arying and Y to b e constan t. Synthesizing the LPV con troller using this metho d results in an L 2 -gain of 0.91. 4.3 L i2 -gain LPV Synthesis In order to p erform the incremental synthesis metho d as describ ed in Section 3, the incremen tal form of (15) is computed and the resulting relation is embedded in an LPV represen tation, resulting in δ ˙ x 1 = δ x 2 ; δ ˙ x 2 = − k 1 m − 3 k 2 m ρ δ x 1 − d m δ x 2 + 1 m δ u ; δ y = δ x 1 ; (17) where again ρ = y 2 with bounds same as for (16). Note that the primal and incremen tal form can b e embedded using the same sc heduling map. The same generalized plan t structure is used as in Section 4.2, see Fig. 2, as well as the same LPV syn thesis metho d, i.e. the p olytopic synthesis method based on (Apk arian and Adams, 1998). Performing the synthesis results in an L i2 - gain of 0.98. The resulting controller is realized using the pro cedure as describ ed in Section 3.4. 4.4 Simulation R esults Using the synthesized L 2 LPV controller and L i2 LPV con troller, the NL system (15) is simulated in terconnected Fig. 3. T racking p erformance of the L 2 con troller ( ), and L i2 con trolller ( ); reference tra jectory ( ). Fig. 4. T racking p erformance (with constant input distur- bance) of the L 2 con troller ( ), and L i2 con trolller ( ); reference tra jectory ( ). to the controllers. As a reference tra jectory , a step signal is c hosen which changes from 0 to 0.3 at t = 5s. F urthermore, the system is also sim ulated with and without a constant input disturbance of 6 N. This input disturbance can for instance b e seen as additional mass attached to the system. In Fig. 3 the tra jectories of the system interconnect with the resp ectiv e controller are shown in the case when no input disturbance is present and in Fig. 4 the case when an input disturbance is present is shown. Moreov er, Fig. 5 displa ys the control input generated by the controllers in the case where input disturbance is present. F rom Fig. 3 it can b e observed that b oth the L 2 and L i2 LPV con trollers obtain very similar p erformance; the L i2 LPV controller only has slightly more ov ersho ot, but also has a slightly low er settling time. On the other hand, when the input disturbance is present, shown in Fig. 4, it is apparen t that the L 2 LPV controller is not able to guaran tee the tracking and disturbance requiremen ts an ymore and depicts oscillatory b ehavior, similar to results describ ed in (Scorletti et al., 2015). The prop osed L i2 LPV controller design on the other hand is still able to obtain the desired p erformance. F rom Fig. 5 it can clearly b e seen that the oscillations are caused b y the control input generated by the L 2 LPV controller, as oscillations are also present in the control input signal, whereas this is not the case with the L i2 LPV con troller. Anal ysis T o show that the b ehavior of the L 2 LPV con troller is not due to improp er tuning of the weigh ting filters, the pro cess sensitivity (i.e. d i to z 1 ) of the LPV plan t (16) in closed-lo op interconnection with the L 2 LPV con troller is displa yed in Fig. 6 for frozen v alues of the sc heduling-v ariable, along with the inv erse w eighting filter W − 1 1 · W − 1 3 . Based on the graph in Fig. 6 it would b e Fig. 5. Generated con trol input of the L 2 con troller ( ), and L i2 con trolller ( ) (with constan t input disturbance presen t). Fig. 6. Pro cess sensitivit y with L 2 LPV con troller ( ), and the corresponding in verse weigh ting filter ( ). natural to exp ect that if a constant input disturbance w ould b e applied, the error is around -80 dB (this will b e sligh tly higher due to also p erforming reference trac king sim ultaneously). In the generalized plant W 3 is chosen with a w eight of 1.5, therefore when an input disturbance of 6 N is applied to the system, the exp ected error would b e 4 times higher. Hence, based on the standard analysis of the L 2 LPV con troller, a constant tracking error of only - 68 dB would b e exp ected. This is in large con trast to the trac king error of the L 2 LPV con troller, seen in Fig. 4, whic h has oscillatory b eha vior. This again highligh ts that the current analysis for stability and p erformance using the L 2 -gain concept is not the prop er metho d to also analyze p erformance requiremen ts for NL systems through the LPV framew ork in case of reference tracking and disturbance rejection. 5. CONCLUSION In this pap er w e show ed that the notion of L 2 -gain stabilit y is not able to guarantee reference tracking and disturbance rejection requiremen ts for NL systems through the LPV framew ork. Using L 2 -gain based LPV syn thesis methods can result in oscillatory b ehavior when p erforming refer- ence tracking and disturbance rejection. A new synthesis pro cedure is proposed in the form of the L i2 LPV con troller whic h is able to guaran tee incremental gain stability and p erformance, ensuring that tracking and disturbance re- quiremen ts ar e attained. Which is also verified based on the sim ulation study of the p osition con trol problem of a Duffing oscillator. Moreov er, compared to the metho ds prop osed in literature, the prop osed metho d allo ws for easy p erformance shaping through the LPV framework; has the additional b enefit that it can b e used for larger class of NL con trol problems and systems; and existing LPV synthesis metho ds can be used during the syn thesis pro cess, resulting in a controller with a larger degree of freedom. REFERENCES Apk arian, P . and Adams, R.J. (1998). Adv anced gain- sc heduling tec hniques for uncertain systems. IEEE T r ansactions on Contr ol Systems T e chnolo gy . Apk arian, P ., Gahinet, P ., and Beck er, G. (1995). Self- sc heduled H ∞ con trol of linear parameter-v arying sys- tems: a design example. Automatic a . F romion, V., Monaco, S., and Normand-Cyrot, D. (2001). The w eighted incremen tal norm approach: F rom linear to nonlinear H ∞ -con trol. Automatic a . F romion, V., Scorletti, G., and F erreres, G. (1999). Non- linear p erformance of a PI controlled missile: An expla- nation. International Journal of R obust and Nonline ar Contr ol . F romion, V. and Scorletti, G. (2003). A theoretical frame- w ork for gain scheduling. International Journal of R obust and Nonline ar Contr ol . Ko elewijn, P .J.W., T´ oth, R., Mazzo ccan te, G.S., and Ni- jmeijer, H. (2019). Nonlinear tracking and rejection using linear parameter-v arying control. Submitte d to IEEE T r ansaction on Contr ol Systems T e chnolo gy . Ko elewijn, P .J.W. and Tth, R. (2019). Incr emental gain of L TI systems . T echnical Rep ort TUE CS. Eindhov en Univ ersity of T echnology . Kwiatk owski, A., Boll, M.T., and W erner, H. (2006). Auto- mated Generation and Assessment of Affine LPV Mo dels. Pr o c. of the 45th IEEE Confer enc e on De cision and Con- tr ol . Leith, D.J. and Leithead, W.E. (1999). Input-output lin- earization b y velocity-based gain-scheduling. Interna- tional Journal of Contr ol . Lohmiller, W. and Slotine, J.J.J.E. (1998). On Contraction Analysis for Nonlinear Systems. Automatic a . Lohmiller, W. and Slotine, J.J.J.E. (2000). Control system design for mec hanical systems using contraction theory. IEEE T r ansactions on A utomatic Contr ol . P ack ard, A. (1994). Gain scheduling via linear fractional transformations. Systems and Contr ol L etters . P avlo v, A., Pogromsky , A., v an de W ou w, N., and Nijmeijer, H. (2004). Con vergen t dynamics, a tribute to Boris P avlo vich Demidovic h. Systems and Contr ol L etters . P avlo v, A., v an de W ouw, N., and Nijmeijer, H. (2007). Global nonlinear output regulation: Con vergence-based con troller design. Automatic a . Sc herer, C.W. (2001). LPV con trol and full blo ck multipli- ers. Automatic a . Scorletti, G., F romion, V., and De Hillerin, S. (2015). T o- w ard nonlinear tracking and rejection using LPV con trol. Pr o c. of the 1st IF A C Workshop on Line ar Par ameter V arying Systems . T´ oth, R. (2010). Mo deling and Identific ation of Line ar Par ameter-V arying Systems . Springer. W u, F. (1995). Control of linear parameter v arying systems. Ph.D. dissertation, University of Berkeley, California and USA . Zames, G. (1966). On the Input-Output Stability of Time- V arying Nonlinear F eedback Systems Part I: Conditions Deriv ed Using Concepts of Lo op Gain, Conicit y , and P ositivity. IEEE T r ansactions on Automatic Contr ol .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment