Limited-budget output consensus for descriptor multiagent systems with energy constraints
The current paper deals with limited-budget output consensus for descriptor multiagent systems with two types of switching communication topologies; that is, switching connected ones and jointly connected ones. Firstly, a singular dynamic output feed…
Authors: Jianxiang Xi, Cheng Wang, Xiaojun Yang
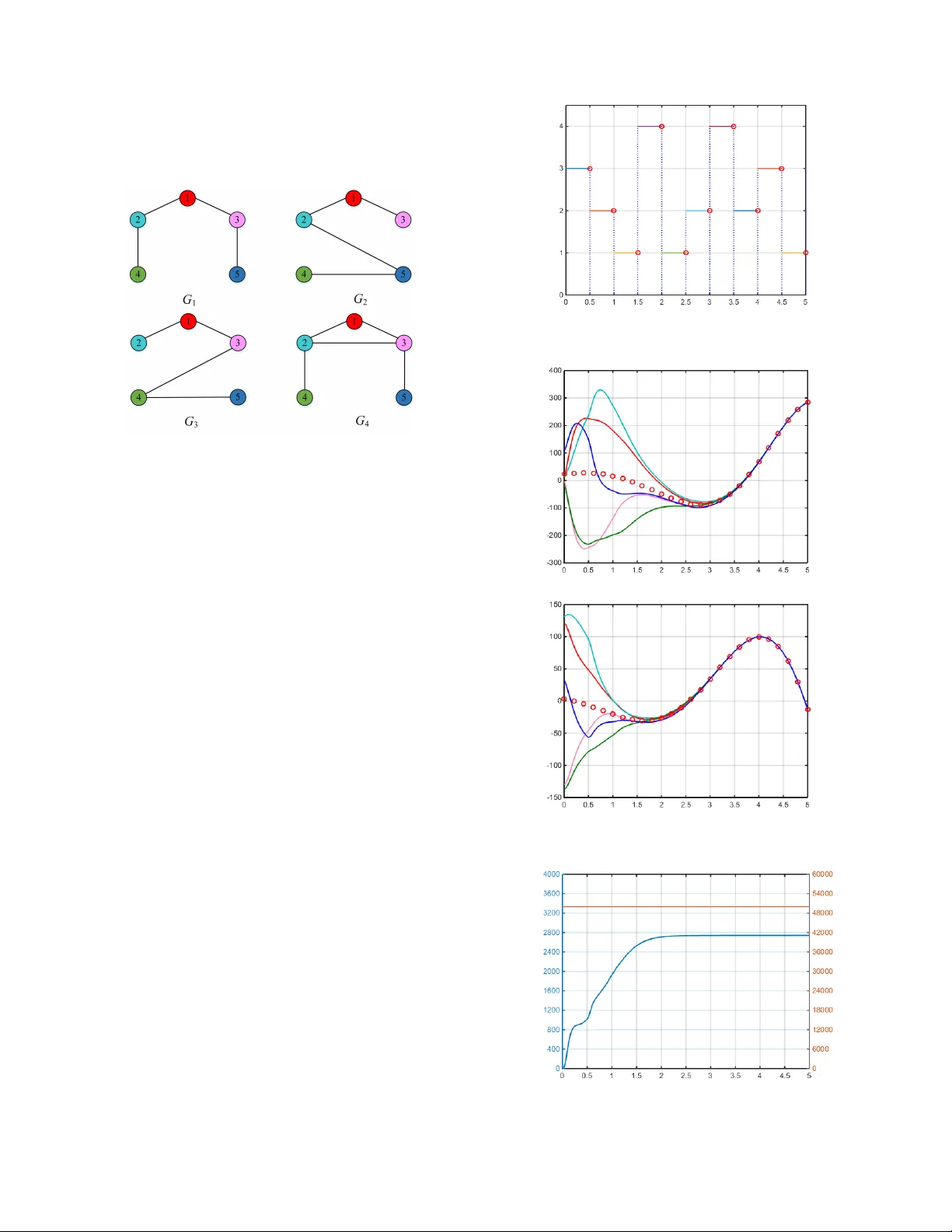
IEEE TRANSA CTIONS ON CYBERNETICS 1 Limited-b udget output consensus for descriptor multiagent systems with energy constraints Jianxiang Xi, Cheng W ang, Xiaojun Y ang, Bailong Y ang Abstract —The current paper deals with limited-budget output consensus for descriptor multiagent systems with two types of switching communication topologies; that is, switching connected ones and jointly connected ones. Firstly , a singular dynamic output feedback control protocol with switching communication topologies is proposed on the basis of the obser vable decom- position, wher e an ener gy constraint is inv olved and protocol states of neighboring agents are utilized to derive a new two- step design approach of gain matrices. Then, limited-budget output consensus problems are transf ormed into asymptotic stability ones and a valid candidate of the output consensus function is determined. Furthermore, sufficient conditions for limited-budget output consensus design for two types of switching communication topologies are proposed, respectiv ely . Finally , two numerical simulations are shown to demonstrate theoretical conclusions. Index T erms —Multiagent system, descriptor system, output consensus, limited budget, switching topology . I . I N T RO D U C T I O N D URING the last decade, consensus of multiagent sys- tems recei ves considerable attention, which designs a distributed control protocol to driv e multiple agents to achie ve an agreement about some interested v ariables such as time, position, velocity and temperature, et al ., as shown in [1]- [6]. Consensus has potential practical applications in formation control [7]- [10], tar get tracking [11]- [12], network synchroni- sation [13]- [14] and multiple source data analysis [15]- [16], et al . The communication topologies are critically important for multiagent systems to achie ve consensus, which can usually be categorized into the fixed ones and switching ones. For fixed communication topologies, the neighboring relationship and communication weights are time-inv ariant, as discussed in [17] and [18]. F or switching communication topologies, the neighboring relationships may be time-varying, but communi- cation weights are time-inv ariant. In this case, the associated Laplacian matrices of the communication topologies are piece- wise continuous, as shown in [19]- [21], where switching com- munication topologies are divided into switching connected ones and jointly connected ones. F or switching connected communication topologies, each topology in the switching set is connected. For jointly connected communication topologies, the union of topologies in certain time interval is connected, but each topology in the switching set can be unconnected. It is well-known that consensus for jointly connected com- munication topology cases is more complex than the one for switching connected communication topology cases. Jianxiang Xi, Cheng W ang, Bailong Y ang are with Rocket Force University of Engineering, Xi’an, 710025, P .R. China, and Xiaojun Y ang is with School of Information Engineering, Guangdong University of T echnology , Guangzhou, 510006, P .R. China. (Corresponding author: Xiaojun Y ang, yangxj18@gdut.edu.cn) According to the dynamics of each agent, multiagent sys- tems can be categorized into normal ones and descriptor ones. For normal multiagent systems, each agent is modeled as differential equations and only owns dynamic modes, as addressed in [22]- [24]. For descriptor multiagent systems, the dynamics of each agent may contain algebraic constrains and cannot be modeled by differential equations. In practical appli- cations, descriptor multiagent systems can be used in complex networks and multiagent supporting systems, as discussed in [25]. Moreover , the motion of each agent may be deriv ed by impulsiv e modes, static modes and dynamic modes, where impulsiv e modes should be eliminated since they destroy the operation of the whole system, and the motions associated with both static modes and dynamic modes should achieve con- sensus. Y ang and Liu [26] proposed necessary and sufficient consensus conditions of descriptor multiagent systems with fixed communication topologies by a static output feedback control protocol, where a specific rank constrain is required. In [27], the impacts of communication delays on consensus of descriptor multiagent systems were analyzed, where it was also supposed that communication topologies are fixed. W ang and Huang [28] dealt with consensus analysis and design problems for descriptor multiagent systems with switching communication topologies. Based on different interested variables, consensus can be categorized into state consensus and output consensus, where it is only required that partial states or state combinations achiev e agreement for output consensus. Chopra and Spong [29] first introduced the concept of output consensus and proposed the associated consensus criteria for normal non- linear multiagent systems with relativ e degree one. Xiao et al . [30] modeled the dynamics of each agent in multiagent systems as a normal second-order integrator and gav e sufficient conditions for output consensus. Liu and Jia [31] proposed an H ∞ analysis approach to inv estigate output consensus for normal multiagent systems with external disturbances, where each agent was modeled as a type of special controllability canonical form. In [32], output consensus for normal single- input-single-output high-order linear multiagent systems was addressed by the output regulation theory . Xi et al . [33] focused general normal high-order multiagent systems and proposed output consensus analysis and design criteria by a partial stability method. It should be pointed that the dynamics of each agent is normal in [29]- [33], where it was shown that output consensus is more challenging than state consensus. In the abov e literatures, the ener gy limitation and/or the consensus performance were not considered, which can be modeled as certain optimization consensus problems. Cao and Ren [34] gave optimal consensus criteria by the linear quadratic regulator , where it was required that the communi- IEEE TRANSA CTIONS ON CYBERNETICS 2 cation topology is complete, which means that the nonzero eigen values of the corresponding Laplacian matrix are iden- tical. Actually , this requirement of optimal consensus on the communication topology is conservatism, and suboptimal consensus was extensiv ely studied. Guaranteed-performance consensus for normal multiagent systems was dealt with in [35] and [36], where it was supposed that communication topologies are fixed. Linear matrix inequality criteria for guaranteed-cost consensus with communication delays were presented in [37] and [38]. In [39] and [40], guaranteed- cost consensus for normal multiagent systems with switching topologies was discussed and the associated guaranteed-cost consensus analysis and design criteria were proposed. In [35]- [40], state consensus instead of output consensus for normal multiagent systems was inv estigated and the guaranteed cost cannot be given previously . T o the best of our kno wledge, limited-budget output consensus for descriptor multiagent sys- tems with switching communication topologies is still open and the following three challenging problems should be dealt with: (i) Ho w to eliminate impulsi ve modes and guarantee that the motions associated with static modes achieve output consensus; (ii) Ho w to introduce the given budget into consen- sus criteria and construct the relationship between the gi ven budget and initial outputs instead of initial states; (iii) How to determine the impacts of switching topologies and ensure the checkable feature of the associated consensus criteria. The current paper focuses on limited-budget output con- sensus for descriptor multiagent systems and addresses the impacts of two types of switching communication topologies. Based on the observable decomposition of the dynamics of each agent, a singular dynamic output feedback consensus protocol with an ener gy constraint and topology switching is presented, which can make the dynamics of the whole multiagent system satisfy some separation feature; that is, its gain matrices lies on diagonal boxes of an upper triangular matrix. Furthermore, using the characteristics that the row sum of the Laplaican matrix of the communication topology is zero, the disagreement and consensus dynamics of a descriptor mul- tiagent system are determined and they are independent with each other . For switching connected communication topology cases, a new two-step design approach is proposed to design gain matrices of consensus protocols, the relationship between the given ener gy budget and the matrix variable is constructed, and limited-budget output consensus design criteria are giv en, respectiv ely . For jointly connected communication topology cases, by the Cauchy con vergence criterion and Barbalat’ s lemma, suf ficient conditions for limited-budget output consen- sus design are presented, respectively . I I . P RO B L E M D E S C R I P T I O N The dynamics of the m th agent of a high-order homoge- neous descriptor multiagent system is modeled by E ˙ x m ( t ) = Ax m ( t ) + B u m ( t ) , y m ( t ) = C x m ( t ) , (1) where m = 1 , 2 , · · · , N , E ∈ R n × n , A ∈ R n × n , B ∈ R n × k , C ∈ R l × n and x m ( t ) , u m ( t ) and y m ( t ) denote the system state, the control input and the system output, respectiv ely . Because the matrix E may be singular; that is, rank ( E ) ≤ n , multiagent system (1) is called the descriptor multiagent system. Compared with normal multiagent systems modeled by dif ferential equations, multiagent system (1) may contain static modes and impulsive modes besides dynamic modes. Impulsive modes must be eliminated by designing proper consensus protocols since they destroy the operation of the whole system. For multiagent system (1), all the states associated with both dynamic modes and static modes should achiev e consensus. This autonomous system of multiagent system (1) can also be represented by the pair ( E , A ) , whose some specific properties compared with normal systems are listed as follo ws. Definition 1: [41] The pair ( E , A ) is r e gular if | σ E − A | 6 = 0 for some σ ∈ C and impulse-free if deg ( | σ E − A | ) = rank ( E ) for ∀ σ ∈ C . Lemma 1: [41] The pair ( E , A ) is regular and impulse-free if and only if rank E 0 A E = n + rank ( E ) . Lemma 2: [41] The pair ( E , A ) is regular , impulse-free and asymptotically stable if and only if there exists a matrix R such that E T R = R T E ≥ 0 and A T R + R T A < 0 . W e first introduce the observable decomposition of the tripe ( E , A, C ) . Let U o be an in vertible matrix such that U − 1 o E U o = E o 0 E ˜ o E o , U − 1 o B = B o B o , U − 1 o AU o = A o 0 A ˜ o A o , C U o = [ C o , 0 ] , where E o ∈ R h × h , A o ∈ R h × h , B o ∈ R h × k , C o ∈ R l × h and the triple ( E o , A o , C o ) is observable. Then, the following consensus protocol with switching topologies and an energy constraint is proposed: E o ˙ z m ( t ) = ( A o + B o K u ) z m ( t ) − K z C o P j ∈ N m,κ ( t ) w mj,κ ( t ) ( z j ( t ) − z m ( t )) + K z P j ∈ N m,κ ( t ) w mj,κ ( t ) ( y j ( t ) − y m ( t )) , u m ( t ) = K u z m ( t ) , J e = N P m =1 R + ∞ 0 u T m ( t ) M u m ( t ) d t, (2) where m = 1 , 2 , · · · , N , K u ∈ R k × h , K z ∈ R h × l , M T = M > 0 , N m,κ ( t ) is the neighbor set of the m th agent at time t , z m ( t ) with z m (0) = 0 stands for the protocol state, and J e represents the energy consumption of the whole multiagent system. Let J ∗ e > 0 be a given energy budget; that is, the whole energy consumption of multiagent system (1) with consensus protocol (2) must be less than J ∗ e . In the follo wing, we gi ve the definition of the limited-b udget output consensus of descriptor multiagent systems. Definition 2: For any gi ven J ∗ e > 0 , multiagent system (1) is said to be limited-b udget output consensualizable by consensus protocol (2) if it is regular and impulse-free and there exist K u and K z such that lim t → + ∞ ( y m ( t ) − c o ( t )) = 0 ( m = 1 , 2 , · · · , N ) and J e ≤ J ∗ e for any bounded disagreement IEEE TRANSA CTIONS ON CYBERNETICS 3 initial outputs, where c o ( t ) is said to be the output consensus function . The current paper gi ves two design approaches of gain matrices K u and K z such that multiagent system (1) with con- sensus protocol (2) achieves limited-budget output consensus for switching connected communication topologies and jointly connected communication topologies, respectiv ely . I I I . P RO B L E M T R A N S F O R M A T I O N By the observable decomposition and the separation prin- ciple, consensus problems for multiagent system (1) with consensus protocol (2) are transformed into asymptotic sta- bility ones for a reduced-order subsystem, and the consensus dynamics is also determined. Let U − 1 o x m ( t ) = x T om ( t ) , x T om ( t ) T , then multiagent sys- tem (1) can be transformed into E o 0 E ˜ o E o ˙ x om ( t ) ˙ x om ( t ) = A o 0 A ˜ o A o x om ( t ) x om ( t ) + B o ( t ) B o ( t ) u m ( t ) , y m ( t ) = C o x om ( t ) , (3) where m = 1 , 2 , · · · , N . It can be found that the system output y m ( t )( m ∈ 1 , 2 , · · · , N ) depends on the observable compo- nent x om ( t ) , but it is not associated with the unobservable component x om ( t ) . Hence, when the limited budget is not considered, multiagent system (1) achiev es output consensus if and only if the observable component of each agent achieves consensus. In this case, the unobservable component of each agent can be neglected and the observable component of multiagent system (1) with consensus protocol (2) can be written in the following Kronecker form as I N ⊗ E o E o ˙ x o ( t ) ˙ z o ( t ) = I N ⊗ A o − L κ ( t ) ⊗ K z C o I N ⊗ B o K u I N ⊗ ( A o + B o K u ) + L κ ( t ) ⊗ K z C o x o ( t ) z o ( t ) , (4) where x o ( t ) = x T o 1 ( t ) , x T o 2 ( t ) , · · · , x T oN ( t ) T , z o ( t ) = z T 1 ( t ) , z T 2 ( t ) , · · · , z T N ( t ) T and L κ ( t ) is the Laplacian matrix of the switching communication topology , which is piece wise continuous since the switching signal κ ( t ) is piecewise con- tinuous. Since each communication topology in the switching set is undirected, the associated Laplacian matrix L κ ( t ) is sym- metric, where zero is its eigen value with an eigen vector 1 / √ N . In this case, there exists an orthonormal matrix U κ = h 1 / √ N , ˜ U κ i such that U T κ L κ ( t ) U κ = diag 0 , ∆ κ ( t ) , where ∆ κ ( t ) = ˜ U T κ L κ ( t ) ˜ U κ ∈ R ( N − 1) × ( N − 1) and U κ is set to be time-varying for switching connected communica- tion topology cases and time-in variant for jointly connected communication topology cases. W e introduce the following nonsingular transformation ˜ x o ( t ) = U T κ ⊗ I h x o ( t ) = ˜ x T o 1 ( t ) , ˜ x T o 2 ( t ) , · · · , ˜ x T oN ( t ) T , ˜ z o ( t ) = U T κ ⊗ I h z o ( t ) = ˜ z T o 1 ( t ) , ˜ z T o 2 ( t ) , · · · , ˜ z T oN ( t ) T . Thus, multiagent system (4) can be transformed into E o E o ˙ ˜ z o 1 ( t ) ˙ ˜ x o 1 ( t ) = A o + B o K u 0 B o K u A o ˜ z o 1 ( t ) ˜ x o 1 ( t ) , (5) I N − 1 ⊗ E o E o ˙ ˜ z o ∆ ( t ) ˙ ˜ x o ∆ ( t ) = I N − 1 ⊗ ( A o + B o K u )+ ∆ κ ( t ) ⊗ K z C o − ∆ κ ( t ) ⊗ K z C o I N − 1 ⊗ B o K u I N − 1 ⊗ A o × ˜ z o ∆ ( t ) ˜ x o ∆ ( t ) , (6) where ˜ x o ∆ ( t ) = ˜ x T o 2 ( t ) , ˜ x T o 3 ( t ) , · · · , ˜ x T oN ( t ) ] T and ˜ z o ∆ ( t ) = ˜ z T o 2 ( t ) , ˜ z T o 3 ( t ) , · · · , ˜ z T oN ( t ) ] T . Let U s = I ( N − 1) h 0 I ( N − 1) h − I ( N − 1) h , ˆ z o ∆ ( t ) ˆ x o ∆ ( t ) = U s ˜ z o ∆ ( t ) ˜ x o ∆ ( t ) , then subsystem (6) can be transformed into I N − 1 ⊗ E o E o ˙ ˆ z o ∆ ( t ) ˙ ˆ x o ∆ ( t ) = I N − 1 ⊗ ( A o + B o K u ) ∆ κ ( t ) ⊗ K z C o 0 I N − 1 ⊗ A o +∆ κ ( t ) ⊗ K z C o × ˆ z o ∆ ( t ) ˆ x o ∆ ( t ) . (7) Let the minimum and maximum nonzero eigen values of the Laplacian matrices of all the communication topologies in the switching set denote as λ min = min { λ m, min , ∀ m ∈ χ } and λ max = max { λ m, min , ∀ m ∈ χ } , where λ m, min and λ m, max represent the minimum and maximum nonzero eigen values of the Laplacian matrix of the m th communication topology in the switching set, respecti vely . These two notations are used for both switching connected communication topology cases and jointly connected communication topology cases. Moreov er , subsystems (5) and (6) determine consensus and disagreement dynamics of multiagent system (1). The following theorem con verts the consensus problem into the asymptotic stability one and determines a candidate of the output consensus function. Theor em 1: If multiagent system (1) with consensus pro- tocol (2) is regular and impulse-free and lim t → + ∞ ˆ z T o ∆ ( t ) , ˆ x T o ∆ ( t ) T = 0 , then it achieves output consensus and lim t →∞ c o ( t ) − C o ˜ x o 1 ( t ) / √ N = 0 . Pr oof : Let e m ( m ∈ 1 , 2 , · · · , N ) denote the N -dimensional column vector with the m th component 1 and 0 elsewhere. Due to U κ e 1 = 1 √ N 1 , one can show that U κ e 1 ⊗ ˜ x o 1 ( t ) = 1 √ N 1 ⊗ ˜ x o 1 ( t ) . (8) IEEE TRANSA CTIONS ON CYBERNETICS 4 From the property of the Kronecker product, one can find that U κ e 1 ⊗ ˜ x o 1 ( t ) = ( U κ ⊗ I h ) ˜ x o 1 ( t ) 0 , (9) N X m =2 U κ e m ⊗ ˜ x om ( t ) = ( U κ ⊗ I h ) 0 ˜ x o ∆ ( t ) . (10) Because U s is in vertible, lim t →∞ ˜ z T o ∆ ( t ) , ˜ x T o ∆ ( t ) T = 0 if lim t →∞ ˆ z T o ∆ ( t ) , ˆ x T o ∆ ( t ) T = 0 . Due to x o ( t ) = ( U κ ⊗ I h ) ˜ x o ( t ) , the conclusion can be obtained from (8) to (10). The proof of Theorem 1 is completed. I V . S W I T C H I N G C O N N E C T E D C O M M U N I C A T I O N T OP O L O G Y C A S E S For multiagent system (1) with switching connected com- munication topologies, this section gi ves sufficient conditions for limited-budget output consensualization and consensus in terms of matrix inequality techniques. Since each communication topology in the switching set is connected, zero is its simple eigen value of the Laplacian matrix L κ ( t ) and all other eigen values are positi ve. W ith- out loss of generality , we can set that ˜ U κ = ˜ U κ ( t ) such that ˜ U T κ ( t ) ∆ κ ( t ) ˜ U κ ( t ) = diag λ κ ( t ) , 2 , λ κ ( t ) , 3 , · · · , λ κ ( t ) ,N with 0 < λ κ ( t ) , 2 ≤ λ κ ( t ) , 3 ≤ · · · ≤ λ κ ( t ) ,N . In this case, ˜ U κ is piecewise continuous, λ min = min { λ m, 2 , ∀ m ∈ χ } and λ max = max { λ m,N , ∀ m ∈ χ } . Let y o (0) = y T 1 (0) , y T 2 (0) , · · · , y T N (0) T . The following theorem proposes a limited-budget output consensualization criterion by matrix inequality techniques. Theor em 2: For any gi ven J ∗ e > 0 , multiagent system (1) with switching connected cummnication topologies is limited- budget output consensualizable by consensus protocol (2) if there exist R x and R z such that (I) rank E o 0 A o E o = h + rank ( E o ) , (I I) E T o R x = R T x E o ≥ 0 , R T x A o + A T o R x − C T o C o < 0 , y T o (0) I N − N − 1 11 T ⊗ I h y o (0) E T o R x ≤ J ∗ e C T o C o , (I II) R T z E T o = E o R z ≥ 0 , Θ m = Θ 11 Θ m 12 0 . 5 B o M ∗ Θ 22 0 ∗ ∗ − M < 0 , where λ m = λ min , λ max and Θ 11 = A o R z + R T z A T o − B o B T o , Θ m 12 = − 0 . 5 λ m R − T x C T o C o , Θ 22 = R T x A o + A T o R x − C T o C o . In this case, K u = − B T o R − 1 z / 2 and K z = − λ − 1 min R − T x C T o / 2 . Pr oof : Consider a L yapunov function candidate as follo ws V x ( t ) = ˆ x T o ∆ ( t ) I N − 1 ⊗ E T o R x ˆ x o ∆ ( t ) , where E T o R x = R T x E o ≥ 0 . Let ˆ x o ∆ ( t )= ( ˆ x 2 o ∆ ( t )) T , ˆ x 3 o ∆ ( t )) T , · · · , ˆ x N o ∆ ( t )) T T with ˆ x m o ∆ ( t ) ∈ R h ( m = 2 , 3 , · · · , N ) , then it can be deduced by (7) that ˙ V x ( t ) = N X m =2 ( ˆ x m o ∆ ( t )) T R T x A o + λ κ ( t ) ,m K z C o + A o + λ κ ( t ) ,m K z C o T R x ) ˆ x m o ∆ ( t ) . Let K z = − λ − 1 min R − T x C T o / 2 , then one can obtain that ˙ V x ( t )= N X m =2 ( ˆ x m o ∆ ( t ) ) T R T x A o + A T o R x − λ κ ( t ) ,m λ − 1 min C T o C o ˆ x m o ∆ ( t ) ≤ N X m =2 ( ˆ x m o ∆ ( t )) T R T x A o + A T o R x − C T o C o ˆ x m o ∆ ( t ) . (11) Furthermore, construct the following L yapunov function can- didate V z ( t ) = ˆ z T o ∆ ( t ) I N − 1 ⊗ E T o ˆ R z ˆ z o ∆ ( t ) , where E T o ˆ R z = ˆ R T z E o ≥ 0 . Let ˆ z o ∆ ( t )= h ˆ z 2 o ∆ ( t ) T , ˆ z 3 o ∆ ( t ) T , · · · , ˆ z N o ∆ ( t ) T i T with ˆ z m o ∆ ( t ) ∈ R h ( m = 2 , 3 , · · · , N ) , then it can be deduced by (7) that ˙ V z ( t ) = N X m =2 ( ˆ z m o ∆ ( t )) T ˆ R T z ( A o + B o K u ) + ( A o + B o K u ) T ˆ R z ˆ z m o ∆ ( t ) + 2 λ κ ( t ) ,m ( ˆ z m o ∆ ( t )) T ˆ R T z K z C o ˆ x m o ∆ ( t ) . Let K u = − B T o R − 1 z / 2 and R z = ˆ R − 1 z , then it can be deri ved that ˙ V z ( t )= N X m =2 R − 1 z ˆ z m o ∆ ( t ) T A o R z + R T z A T o − B o B T o R − 1 z ˆ z m o ∆ ( t ) + 2 λ κ ( t ) ,m R − 1 z ˆ z m o ∆ ( t ) T K z C o ˆ x m o ∆ ( t ) . (12) Because U κ ( t ) ⊗ I h and U s are nonsingular , multiagent system (4) is regular and impulse-free if and only if ( E o , A o ) , E o , A o + λ κ ( t ) ,m K z C o ( m = 2 , 3 , · · · , N ) and ( E o , A o + B o K u ) are regular and impulse-free. From Lemma 1, the pair ( E o , A o ) is regular and impulse-free if Condition (I) holds. By Lemma 2, E o , A o + λ κ ( t ) ,m K z C o ( m = 2 , 3 , · · · , N ) are re gular and impulse-free if E T o R x = R T x E o ≥ 0 and R T x A o + A T o R x − C T o C o < 0 , and ( E o , A o + B o K u ) is regular and impulse-free if R T z E T o = E o R z ≥ 0 and A o R z + R T z A T o − B o B T o < 0 . Thus, by (11) and (12), according to Theorem 1, multiagent system (1) with consensus protocol (2) achieves output consensus if Conditions (I)-(III) hold. In the sequel, the limited-budget output consensus is ad- dressed. It can be shown by (2) that J e = Z + ∞ 0 z T o ( t ) I N ⊗ K T u M K u z o ( t )d t. (13) Due to z m (0) = 0 ( m = 1 , 2 , · · · , N ) and ˜ z o ( t ) = U T κ ( t ) ⊗ I h z o ( t ) , one has ˜ z o 1 = 0 . If R T z E T o = E o R z ≥ 0 IEEE TRANSA CTIONS ON CYBERNETICS 5 and A o R z + R T z A T o − B o B T o < 0 , then lim t →∞ ˜ z o 1 ( t ) = 0 . Hence, it can be deduced by (13) that J e = N X m =2 Z + ∞ 0 0 . 25 R − 1 z ˜ z om ( t ) T B o M B T o R − 1 z ˜ z om ( t ) d t. (14) For any ~ ≥ 0 , it can be shown that Z ~ 0 ˙ V x ( t ) + ˙ V z ( t ) d t = V x ( ~ ) − V x (0) + V z ( ~ ) − V z (0) . (15) Due to ˆ z o ∆ ( t ) = ˜ z o ∆ ( t ) , from (14) and (15), it can be deduced that J ~ e , Z ~ 0 z T o ( t ) I N ⊗ K T u M K u z o ( t )d t = N X m =2 Z ~ 0 0 . 25 R − 1 z ˆ z om ( t ) T B o M B T o R − 1 z ˆ z om ( t ) d t + Z ~ 0 ˙ V x ( t ) + ˙ V z ( t ) d t + V x (0) + V z (0) − V x ( ~ ) − V z ( ~ ) . (16) By (11) and (12), one can find that ˙ V x ( t )+ ˙ V z ( t )= N X m =2 R − 1 z ˆ z m o ∆ ( t ) ˆ x m o ∆ ( t ) T A o R z + R T z A T o − B o B T o ∗ − 0 . 5 λ κ ( t ) ,m λ − 1 min R − T x C T o C o R T x A o + A T o R x − C T o C o R − 1 z ˆ z m o ∆ ( t ) ˆ x m o ∆ ( t ) . (17) From (16) and (17), based the con vex property of the linear matrix inequality , if Condition (III) holds, then it can be deriv ed as ~ → + ∞ that J e ≤ V x (0) + V z (0) . (18) Since it is assumed that z m (0) = 0 ( m = 1 , 2 , · · · , N ) , one has ˜ z o (0) = U T κ (0) ⊗ I h z o (0) = 0 ; which means that ˜ z o ∆ (0) = 0 . According to the structure of U s , it can be obtained that ˆ z o ∆ (0) = ˜ z o ∆ (0) = 0 , ˆ x o ∆ (0) = ˜ z o ∆ (0) − ˜ x o ∆ (0) = − ˜ x o ∆ (0) . (19) Thus, one can see that V x (0) + V z (0) = ˆ x T o ∆ (0) I N − 1 ⊗ E T o R x ˆ x o ∆ (0) . (20) From (18) to (20), it can be derived that J e ≤ x T o (0) U κ (0) ⊗ I h 0 T I ( N − 1) h I N − 1 ⊗ E T o R x 0 , I ( N − 1) h U T κ (0) ⊗ I h x o (0) . (21) Due to U κ (0) U T κ (0) = I N , one has ˜ U κ (0) ˜ U T κ (0) = I N − 1 N 11 T . (22) Due to 0 , I ( N − 1) h U T κ (0) ⊗ I h = ˜ U T κ (0) ⊗ I h , one can find by (21) and (22) that J e ≤ x T o (0) I N − 1 N 11 T ⊗ E T o R x x o (0) . (23) Furthermore, one can obtain that x T o (0) I N − 1 N 11 T ⊗ C T o C o x o (0) = ˜ x T o ∆ (0) I N − 1 ⊗ C T o C o ˜ x o ∆ (0) . (24) Due to x o (0) = U κ (0) ⊗ I h ˜ x o (0) , it can be obtained that y o (0) = U κ (0) ⊗ C o ˜ x o (0) . By (9) and (10), the disagreement output component at t = 0 is y (0) − 1 √ N 1 ⊗ C o (0) ˜ x o 1 (0) = U κ (0) ⊗ C o 0 ˜ x o ∆ (0) . (25) Because it is supposed that y m (0) ( m = 1 , 2 , · · · , N ) are not agreement completely , it can be shown by (25) that U κ (0) ⊗ C o 0 ˜ x o ∆ (0) T U κ (0) ⊗ C o 0 ˜ x o ∆ (0) = ˜ x T o ∆ (0) I N − 1 ⊗ C T o C o ˜ x o ∆ (0) > 0 . (26) By (24) and (26), one has x T o (0) I N − 1 N 11 T ⊗ C T o C o x o (0) > 0 . In this case, the given energy budget J ∗ e can be denoted by J ∗ e = x T o (0) I N − 1 N 11 T ⊗ ζ C T o C o x o (0) , (27) where ζ > 0 . For the matrix I N − N − 1 11 T , zero eigenv alue is simple and all the other eigen v alues are positiv e. By (23) and (27), E T o R x ≤ ζ C T o C o can ensure that J e ≤ J ∗ e . Due to x T o (0) I N − 1 N 11 T ⊗ C T o C o x o (0) = y T o (0) I N − 1 N 11 T ⊗ I h y o (0) , one can obtain that y T o (0) I N − N − 1 11 T ⊗ I h y o (0) E T o R x ≤ J ∗ e C T o C o . Based on the above analysis, the conclusion of Theorem 2 can be obtained. V . J O I N T L Y C O N N E C T E D C O M M U N I C A T I O N T O P O L O G Y C A S E S This section in vestigates limited-budget output consensus design problems for multiagent systems with jointly connected communication topologies and gi ves the corresponding output consensus criteria in terms of the Cauch y con ver gence criterion and Barbalat’ s lemma. It is assumed that the time interval [ t m , t m +1 ) consists of a series of non-overlapping contiguous subintervals as follows t 0 m , t 1 m , t 1 m , t 2 m , · · · , t k m − 1 m , t k m m , t 0 m = t m , t k m m = t m +1 , where t i +1 m − t i m ≥ T d ( i = 0 , 1 , · · · , k m − 1) and m is a nonnegativ e integer . The communication topologies switch at t 0 m , t 1 m , · · · , t k m − 1 m and is time-in variant during t i m , t i +1 m ( i = 0 , 1 , · · · , k m − 1) . For jointly IEEE TRANSA CTIONS ON CYBERNETICS 6 connected communication topology cases, the topologies G t 0 m , G t 1 m , · · · , G t k m − 1 m can be unconnected, but their union is connected. Let L κ ( t 0 m ) , L κ ( t 1 m ) , · · · , L κ ( t k m − 1 m ) be the Laplacian matrices of G t 0 m , G t 1 m , · · · , G t k m − 1 m , then L κ ( t m ) = P k m − 1 i =0 L κ ( t i m ) is the Laplacian matrix of a connected topology if the communication topologies during [ t m , t m +1 ) are jointly connected. Here, we set that the transformation U κ is time-in variant. Let U T κ L κ ( t i m ) U κ = diag 0 , ∆ κ ( t i m ) with ∆ κ ( t i m ) = ˜ U T κ L κ ( t i m ) ˜ U κ , then the following conclusion can be obtain directly . Lemma 3: ∆ κ ( t m ) = P k m − 1 i =0 ∆ κ ( t i m ) is symmetric and positiv e definite and its eigen v alues are nonzero eigenv alues of L κ ( t m ) . In the following, a limited-budget output consensus design criterion for jointly connected communication topology cases is proposed. Theor em 3: For any gi ven J ∗ e > 0 , multiagent system (1) with jointly connected cummnication topologies is limited- budget output consensualizable by consensus protocol (2) if ( E o , A o , C o ) is detectable, ( E o , A o , B o ) is stabilizable, and there exist b R x and b R z such that (I) rank E o 0 A o E o = h + rank ( E o ) , (I I) E T o b R x = b R T x E o ≥ 0 , b R T x A o + A T o b R x ≤ 0 , b R T x A o + A T o b R x − C T o C o < 0 , y T o (0) I N − N − 1 11 T ⊗ I h y o (0) E T o b R x ≤ J ∗ e C T o C o , (I II) b R T z E T o = E o b R z ≥ 0 , b Θ m = b Θ 11 b Θ m 12 0 . 5 B o M ∗ b Θ 22 0 ∗ ∗ − M < 0 , A o b R z + b R T z A T o ≤ 0 , where λ m = λ min , λ max and b Θ 11 = A o ˆ R z + b R T z A T o − B o B T o , b Θ m 12 = − 0 . 5 λ m b R − T x C T o C o , b Θ 22 = b R T x A o + A T o b R x − C T o C o . In this case, K u = − B T o b R − 1 z / 2 and K z = − λ − 1 min b R − T x C T o / 2 . Pr oof : Construct the following L yapunov function candidate V x ( t ) = ˆ x T o ∆ ( t ) I N − 1 ⊗ E T o b R x ˆ x o ∆ ( t ) , where E T o b R x = b R T x E o ≥ 0 . Let K z = − λ − 1 min b R − T x C T o / 2 , then by taking the time deri vati ve of V x ( t ) , one can see by (7) that ˙ V x ( t ) = ˆ x T o ∆ ( t ) I N − 1 ⊗ b R T x A o + A T o b R x − λ − 1 min ∆ κ ( t ) ⊗ C T o C o ˆ x o ∆ ( t ) . (28) Since ∆ κ ( t ) = ˜ U T κ L κ ( t ) ˜ U κ and L κ ( t ) is the Laplacian matrix of an undirected communication topology , ∆ κ ( t ) is symmetric and positi ve definite and its eigenv alues are the ones of L κ ( t ) except one zero eigenv alue. Furthermore, since b R T x A o + A T o b R x ≤ 0 and b R T x A o + A T o b R x − C T o C o < 0 , one can find by (28) that ˙ V x ( t ) ≤ ˆ x T o ∆ ( t ) − λ − 1 min ∆ κ ( t ) ⊗ C T o C o ˆ x o ∆ ( t ) ≤ 0 , (29) which means that V x ( t ) conv erges to a finite value as time tends to infinity . In the follo wing, it is shown that V x ( t ) conv erges to zero as time tends to infinity . By the Cauchy con vergence criterion, for the infinite sequence V ( t m ) ( m = 0 , 1 , · · · ) and an y δ > 0 , there exists an integer M > 0 such that the following inequality holds for ∀ m > M : V ( t m ) − V ( t m +1 ) < δ ; that is, − Z t m +1 t m ˙ V ( t )d t < δ. Thus, one can obtain that − Z t 1 m t 0 m ˙ V ( t )d t − Z t 2 m t 1 m ˙ V ( t )d t −· · · − Z t k m m t k m − 1 m ˙ V ( t )d t < δ. (30) Since T d is the minimum dwell time, for any i ∈ { 0 , 1 , · · · , k m − 1 } , it can be found by (29) that − Z t i m + T d t i m ˙ V ( t )d t ≤ − Z t i +1 m t i m ˙ V ( t )d t. (31) From (30) to (31), one has k m − 1 X i =0 Z t i m + T d t i m ˆ x T o ∆ ( t ) λ − 1 min ∆ κ ( t i m ) ⊗ C T o C o ˆ x o ∆ ( t )d t < δ. Hence, one can show that lim t →∞ k m − 1 X i =0 Z t + T d t ˆ x T o ∆ ( t ) λ − 1 min ∆ κ ( t i m ) ⊗ C T o C o ˆ x o ∆ ( t )d t = 0 . (32) Due to ˙ V ( t ) ≤ 0 , ˆ x o ∆ ( t ) is bounded. By (7), ˙ ˆ x o ∆ ( t ) is bounded. Hence, one can obtain that ˆ x T o ∆ ( t ) λ − 1 min ∆ κ ( t m ) ⊗ C T o C o ) ˆ x o ∆ ( t ) is uniformly continuous. From Barbalat’ s lemma in [43], one can find that lim t →∞ ˆ x T o ∆ ( t ) λ − 1 min ∆ κ ( t m ) ⊗ C T o C o ˆ x o ∆ ( t ) = 0 . (33) By Lemma 3, there exists an orthonormal matrix U t m such that U T t m ∆ κ ( t m ) U t m = diag { λ t m , 2 , λ t m , 3 , · · · , λ t m ,N } > 0 . From (32) and (33), one can see that lim t →∞ λ − 1 min λ t m ,i U T t m ˆ x i o ∆ ( t ) T C T o C o × U T t m ˆ x i o ∆ ( t ) = 0 ( i = 2 , 3 , · · · , N ) . Because ( E o , A o , C o ) is detectable and U s is nonsingu- lar , E T o b R x = b R T x E o ≥ 0 , b R T x A o + A T o b R x ≤ 0 and b R T x A o + A T o b R x − C T o C o < 0 in Condition (I) can guarantee that lim t →∞ ˆ x o ∆ ( t ) = 0 . Similarly , one can show that lim t →∞ ˆ z o ∆ ( t ) = 0 if Condition (II) holds. Furthermore, the proofs of the regular , impulse-free and limited-budget property are similar to Theorem 2. Thus, the conclusions of Theorem 3 can be obtained. IEEE TRANSA CTIONS ON CYBERNETICS 7 V I . N U M E R I C A L S I M U L A T I O N In this section, we present two simulation examples to illustrate the validity of the theoretical results gi ven in the abov e section and consider a singular system with five agents. Fig. 1: Switching connected topologies. Example 1: ( Switching connected case ) The system matrices of each agent in multiagent system (1) are set as E = − 0 . 8 − 2 . 4 2 . 4 − 2 . 4 1 . 6 0 0 . 6 0 . 4667 − 0 . 8 0 . 4667 0 . 3556 1 1 . 2 − 2 . 4 − 0 . 6 − 2 . 4 1 . 6 3 1 . 2 − 1 . 0667 − 1 . 6 − 0 . 0667 0 . 7111 2 0 0 0 1 . 5 1 . 0 0 2 . 4 − 0 . 1333 − 3 . 2 − 1 . 1333 0 . 4222 4 , A = 3 . 4 4 . 5333 − 3 . 2 2 . 5333 − 3 . 0222 0 2 . 4 6 . 8667 0 . 8 1 . 8667 − 3 . 2444 − 3 4 . 2 6 . 6 − 2 . 6 − 3 . 9 − 2 . 4 3 2 2 0 − 4 0 2 3 7 3 4 − 3 . 6667 − 6 3 . 8 5 . 7333 − 2 . 4 − 8 . 7667 − 0 . 4889 6 , B = − 35 − 12 − 14 − 4 − 33 9 18 25 14 12 51 7 T , C = − 1 − 4 . 3333 3 − 2 . 3333 2 . 8889 0 − 1 − 2 . 0 3 − 3 . 5 1 . 3333 0 , and the system can be decomposed into an observable system by the in vertible matrix U o as U o = 4 0 3 0 0 0 0 4 0 1 2 0 3 0 1 3 0 0 0 2 0 2 0 0 0 9 0 0 3 0 0 0 0 4 0 1 . Fig. 1 sho ws four dif ferent undirected connected topologies, which are chosen as the switching topologies set κ . For the con venience of analysis, the communication weights among fiv e agents of each topology are assumed to be 0-1. Fig. 2 indicates that the switching signal is random. Let M = 1 0 0 1 , κ ( t ) t / s Fig. 2: Switching signal for switching connected case. y m 1 ( t ) ( m = 1 , 2 , · · · , 5) t / s y m 2 ( t ) ( m = 1 , 2 , · · · , 5) t / s Fig. 3: Output trajectories for switching connected case. J ∗ e J e ( t ) t / s Fig. 4: Trajectories of J e ( t ) and J ∗ e . IEEE TRANSA CTIONS ON CYBERNETICS 8 and the energy budget is set as J ∗ e = 50000 , then one can obtain from Theorem 2 that R x = 20 . 8005 − 2 . 6807 0 − 2 . 6807 14 . 8810 0 − 18 . 1199 − 12 . 2003 − 10 . 0022 , R z = 1 . 0833 1 . 5299 0 1 . 5299 2 . 2577 0 − 909 . 7727 − 910 . 3096 − 911 . 3356 , K u = 7 . 3118 − 5 . 1748 − 0 . 0027 11 . 0466 − 8 . 1502 0 . 0011 , K z = − 0 . 3686 − 0 . 4183 0 − 0 . 2873 0 . 2121 0 T . W e set the initial state value of each agent as follows: x 1 (0) = [60 , − 26 , 81 , − 6 , − 102 , 38] T , x 2 (0) = [64 , − 81 , 75 , − 16 , − 186 , 24] T , x 3 (0) = [ − 60 , 103 , − 6 , 62 , 189 , 37] T , x 4 (0) = [ − 68 , 49 , − 30 , 48 , 114 , 19] T , x 5 (0) = [52 , 38 , 87 , 54 , 66 , 52] T . In Fig. 3, the output trajectories of the descriptor multiagent system are depicted, where the red circle markers describe the trajectory of the output consensus function in Theorem 4. Fig. 4 sho ws the trajectory of the ener gy cost function J e ( t ) with ~ = 5. One can see that output trajectories of all agents con verge to the curve formed by circle markers and J e ( t ) < J ∗ e , which means that the descriptor multiagent system achie ves limited- budget output consensus. Example 2: ( J ointly connected case ) In this case, the system matrices of each agent in multiagent system (1) are set as E = − 8 9 6 12 − 9 − 17 − 5 9 4 11 − 6 − 14 − 12 14 . 5 9 21 . 25 − 12 − 28 − 10 14 8 22 − 12 − 28 0 3 0 4 1 − 4 − 10 14 8 21 − 12 − 27 , A = 13 − 11 . 5 − 8 − 15 . 75 11 22 − 4 1 . 5 4 1 . 75 − 1 − 2 31 − 38 . 5 − 21 − 55 . 75 33 75 − 20 27 16 43 . 5 − 22 − 56 26 − 41 − 19 − 64 34 84 − 24 31 . 5 19 50 . 25 − 26 − 65 , B = − 11 − 11 10 − 6 17 − 11 30 − 3 58 − 2 15 − 5 T , C = − 32 36 24 58 − 32 − 76 − 20 22 . 5 15 29 . 75 − 20 − 41 , and the system can be decomposed into an observable system by the in vertible matrix U o as U o = 1 0 3 0 0 1 0 3 0 1 2 0 3 0 4 0 1 0 0 2 0 2 0 0 1 0 0 0 3 − 1 0 3 0 2 0 0 . Fig. 5: Jointly connected topologies. Fig. 5 sho ws two different jointly connected topologies and each topology is composed of two unconnected topologies. For the conv enience of analysis, the communication weights among these agents of each topology are assumed to be 0-1. The switching order of four topologies is designed as G 1 → G 2 → G 3 → G 4 → G 1 → G 2 · · · ; that is, the switching process is repeated ev ery four times as shown in Fig. 6. Let M = 1 0 0 1 , and the ener gy budget is gi ven as J ∗ e = 10000 . Then, by Theorem 3, one can show that b R x = 26 . 9957 0 0 0 26 . 9957 0 0 0 − 6 . 7489 , b R z = 56 . 8087 0 0 0 56 . 8087 0 0 0 − 14 . 2022 , K u = − 0 . 1320 0 . 0440 − 0 . 3169 − 0 . 1056 0 . 0264 0 . 1760 , K z = 0 . 2856 − 0 . 1428 0 − 0 . 1785 − 0 . 1428 0 T . W e set the initial state value of each agent as follows: x 1 (0) = [2 , − 7 , − 9 , − 6 , 6 , − 14] T , x 2 (0) = [14 , 41 , 15 , 42 , − 4 , 52] T , x 3 (0) = [11 , − 29 , 18 , − 18 , 15 , − 34] T , x 4 (0) = [2 , 19 , − 18 , 2 , − 7 , 8] T , x 5 (0) = [16 , − 3 , 33 , − 14 , 27 , − 21] T . Fig. 7 depicts the output trajectories of this descriptor multiagent system, where the red circle markers depict the curves of the output consensus function shown in Theorem 4. Fig. 8 shows the trajectory of the energy cost function J e ( t ) with ~ = 14. From these figures, two output trajectories of all agents con ver ge to the curves formed by the red circle markers and J e ( t ) < J ∗ e , which means that this descriptor multiagent system achieves limited-budget output consensus. IEEE TRANSA CTIONS ON CYBERNETICS 9 κ ( t ) t / s Fig. 6: Switching signal for jointly connected cases. y m 1 ( t ) ( m = 1 , 2 , · · · , 5) t / s y m 2 ( t ) ( m = 1 , 2 , · · · , 5) t / s Fig. 7: Output trajectories for jointly connected case. J ∗ e J e ( t ) t / s Fig. 8: Trajectories of J e ( t ) and J ∗ e . V I I . C O N C L U S I O N S For descriptor multiagent systems with both switching con- nected communication topologies and jointly connected com- munication topologies, a descriptor dynamic output feedback consensus protocol with an energy constraint was proposed to realize limited-budget output consensus. By the matrix inequality tool, sufficient conditions for limited-budget output consensus design of multiagent systems with switching con- nected communication topologies were presented, where a ne w two-step design approach was gi ven to deal with the nonlinear coupled design problems of two gain matrices and those sufficient conditions are checkable since they are independent of the number of agents. Furthermore, by combining the Cauchy conv ergence criterion and Barbalat’ s lemma, limited- budget output consensus design criteria for jointly connected communication topology cases were proposed, where it was required that each agent is L yapunov stable. R E F E R E N C E S [1] T . V icsek, A. Czir ´ ok, E. Ben-Jacob, I. Cohen, and O. Shochet, “Nov el type of phase transition in a system of self-driven particles, ” Physic Review Letters , vol. 75, no. 6, pp. 1226-1229, Aug. 1995. [2] A. Jadbabaie, J. Lin, and A. S. Morse, “Coordination of groups of mobile autonomous agents using nearest neighbor rules, ” IEEE T ransactions on Automatic Control , vol. 48, no. 6, pp. 988-1001, Jun. 2003. [3] R. Olfati-Saber , “Flocking for multi-agent dynamic systems: Algorithms and theory , ” IEEE T ransactions on Automatic Contr ol , vol. 51, no. 3, pp. 401-420, Mar. 2006. [4] L. Tian, Z. Ji, T . Hou, and K. Liu, “Bipartite consensus on coopetition networks with time-varying delays, ” IEEE Access , vol. 6, pp. 10169- 10178, Feb . 2018. [5] Y . Zhang, J. Sun, H. Liang, and H. Li, “Event-triggered adaptive tracking control for multi-agent systems with unknown disturbances, ” IEEE T ransactions on Cybernetics , DOI: 10.1109/TCYB.2018.2869084. [6] J. Qu, Z. Ji, C. Lin, and H. Y u, “Fast consensus seeking on net- works with antagonistic interactions, ” Complexity , 7831317, 2018. (DOI: 10.1155/2018/7831317) [7] L. Consolini, F . Morbidi, D. Prattichizzo, and M. T osques, “Leader- follower formation control of nonholonomic mobile robots with input constraints, ” Automatica , vol. 44, no. 5, pp. 1343-1349, May 2008. [8] K. K. Oh and H. S. Ahn, “Formation control of mobile agents based on distributed position estimation, ” IEEE T ransactions on Automatic Contr ol , v ol. 58, no. 3, pp. 737-742, Mar. 2013. [9] X. Dong, Y . Zhou, Z. Ren, and Y . Zhong, “Time-v arying formation tracking for second-order multi-agent systems subjected to switching topologies with application to quadrotor formation flying, ” IEEE T rans- actions on Industrial Electr onics , vol. 64, no. 6, pp. 5014-5024, Jun. 2017. [10] H. Liu, T . Ma, F . L. Lewis, and Y . W an, “Robust formation control for multiple quadrotors with nonlinearities and disturbances, ” IEEE T ransactions on Cybernetics , DOI: 10.1109/TCYB.2018.2875559. [11] N. Ili ´ c, M. S. Stankovi ´ c, and S. S. Stankovi ´ c, “ Adaptiv e consensus- based distributed target tracking in sensor networks with limited sensing range, ” IEEE T ransactions on Contr ol Systems T echnology , vol. 22, no. 2, pp. 778-785, Mar . 2014. [12] Q. Zhou, S. Zhao, H. Li, R. Lu, and C. W u, “ Adaptiv e neural network tracking control for robotic manipulators with dead-zone, ” IEEE T ransactions on Neural Networks and Learning Systems , DOI: 10.1109/TNNLS.2018.286937. [13] H. Ma, X. Jia, N. Cai, and J. Xi, “ Adaptiv e guaranteed- performance consensus control for multi-agent systems with an ad- justable con vergence speed, ” Discr ete Dynamics in Natur e and Society , https://arxiv .org/abs/1905.03404. [14] T . Zheng, J. Xi, M. Y uan, and G. Liu, “Guaranteed-performance con- sensus design for Lipschitz nonlinear multi-agent systems with jointly connected topologies, ” International Journal of Robust and Nonlinear Contr ol , to be published. DOI: 10.1002/rnc.4572. [15] Z. Y . T an, N. Cai, J. Zhou, and S. G. Zhang, “On performance of peer revie w for academic journals: Analysis based on distributed parallel system, ” IEEE Access , 2019, DOI: 10.1109/A CCESS.2019.2896978. IEEE TRANSA CTIONS ON CYBERNETICS 10 [16] W . Ren and R. W . Beard, “Consensus seeking in multiagent systems under dynamically changing interaction topologies, ” IEEE T ransactions on A utomatic Contr ol , vol. 50, no. 5, pp. 655-661, May . 2005. [17] J. Qin, X. Z. W ei, and H. Gao, “Coordination of multiple agents with double-integrator dynamics under generalized interaction topologies, ” IEEE T ransactions on Systems, Man, and Cybernetics, P art B (Cyber- netics) , v ol. 42, no. 1, pp. 44-57, Feb . 2012. [18] Z. W u, Y . Xu, Y . P an, H. Su, and Y . T ang, “Event-triggered control for consensus problem in multi-agent systems with quantized relative state measurement and external disturbance, ” IEEE T ransactions on Circuits and Systems I: Regular paper , DOI: 10.1109/TCSI.2017.2777504. [19] Z. Wu, Y . Xu, R. Lu, Y . W u, and T . Huang, “Event-triggered control for consensus of multi-agent systems with fixed/switching topologies, ” IEEE T ransactions on Systems, Man and Cybernetics: Systems , DOI: 10.1109/TSMC.2017.2744671. [20] B. Cheng, X. W ang, and Z. Li, “Event-triggered consensus of ho- mogeneous and heterogeneous multi-agent systems with jointly con- nected switching topologies, ” IEEE T ransactions on Cybernetics , DOI: 10.1109/TCYB.2018.2864974. [21] J. Xi, Z. Fan, H. Liu, and T . Zheng, “Guaranteed-cost consensus for multiagent networks with Lipschitz nonlinear dynamics and switching topologies, ” International Journal of Robust and Nonlinear Control , v ol. 28, no. 7, pp. 2841-2852, May . 2018. [22] Y . Zheng, J. Ma, and L. W ang, “Consensus of hybrid multi-agent systems, ” IEEE T ransactions on Neural Networks and Learning Systems , to be published. DOI: 10.1109/TNNL-S.2017.2651402. [23] F . Xiao, L. W ang, and T . Chen, “Finite-time consensus in networks of integrator-lik e dynamic agents with directional link failure, ” IEEE T ransactions on Automatic Contr ol , vol. 59, no. 3, pp. 756-762, Mar. 2014. [24] X. Lin and Y . Zheng, “Finite-time consensus of switched multiagent sys- tems, ” IEEE T ransactions on Systems, Man, and Cybernetics: Systems , vol. 47, no. 7, pp. 1535-1545, Jul. 2017. [25] J. Xi, Z. Shi, and Y . Zhong, “ Admissible consensus and consensualiza- tion of high-order linear time-in variant singular swarm systems, ” Physica A: Statistical Mechanics and its Applications , vol. 391, no. 23, pp. 5839- 5849, Nov . 2012. [26] X. R. Y ang and G. P . Liu, “Necessary and sufficient consensus conditions of descriptor multi-agent systems, ” IEEE T ransactions on Circuits and Systems-I: Re gular P apers , v ol. 59, no. 11, pp. 2669-2677, No v . 2012. [27] J. Xi, M. He, H. Liu, and J. Zheng, “ Admissible output consensualization control for singular multi-agent systems with time delays, ” Journal of the F ranklin Institute , vol. 353, no. 16, pp. 4074-4090, No v . 2016. [28] S. W ang and J. Huang, “Cooperative output regulation of singular multi- agent systems under switching networks by standard reduction, ” IEEE T ransactions on Cir cuits and Systems-I: Regular P apers , vol. 65, no. 4, pp. 1377-1385, Apr. 2018. [29] N. Chopra and W . Spong, “Output synchronization of nonlinear systems with relative degree one, ” Recent Advances in Learning Contr ol , vol. 371, no. 1, pp. 51-64, Jan. 2008. [30] F . Xiao, L. W ang, and J. Chen, “Partial state consensus for networks of second-order dynamic agents, ” Systems & Contr ol Letters , vol. 59, no. 12, pp. 775-781, Dec. 2010. [31] Y . Liu and Y . Jia, “Consensus problem of high-order multi-agent systems with external disturbances: An H ∞ analysis approach, ” International Journal of Robust and Nonlinear Contr ol , vol. 20, no. 9, pp. 1579-1593, Sep. 2009. [32] H. Kim, H. Shim, and J. H. Seo, “Output consensus of heterogeneous uncertain linear multi-agent systems, ” IEEE T ransactions on Automatic Contr ol , v ol. 56, no. 1, pp. 200-206, Jan. 2011. [33] J. Xi, Z. Shi, and Y . Zhong, “Output consensus analysis and design for high-order linear swarm systems: P artial stability method, ” Automatica , 2012, v ol. 48, no. 9, pp. 2335-2343, Sept. 2012. [34] Y . C. Cao and W . Ren, “Optimal linear-consensus algorithms: An LQR perspectiv e, ” IEEE T ransactions on Systems, Man, and Cybernetics–P art B Cybernetics , vol. 40, no. 3, pp. 819-829, Mar . 2010. [35] Z. H. Guan, B. Hu, M. Chi, D. X. He, and X. M. Cheng, “Guaranteed performance consensus in second-order multi-agent systems with hybrid impulsiv e control, ” Automatica , vol. 50, no. 9, pp. 2415-2418, Sept. 2014. [36] X. Zhou, P . Shi, C. Lim, C. Y ang, and W . Gui, “Event based guaranteed- cost consensus for distributed multi-agent systems, ” Journal of the F ranklin Institute , v ol. 352, no. 9, pp. 3546-3563, Mar. 2015. [37] Y . Zhao and W . Zhang, “Guaranteed cost consensus protocol design for linear multi-agent systems with sampled-data information: An input delay approach, ” ISA T ransactions , vol. 67, pp. 87-97, Mar . 2017. [38] J. Xu, G. Zhang, J. Zeng, J. Xi, and B. Du, “Robust guaranteed cost consensus for high-order discrete-time multi-agent systems with parameter uncertainties and time-varying delays, ” IET Control Theory & Applications , vol. 11, no. 5, pp. 647-667, May . 2017. [39] J. Xi, C. W ang, H. Liu, and L. W ang, “Completely distributed guaranteed-performance consensualization for high-order multiagent systems with switching topologies, ” IEEE T ransactions on Systems, Man, and Cybernetics: Systems , DOI: 10.1109/TSMC.2018.2852277. [40] Y . Zhao, G. Guo, and L. Ding, “Guaranteed cost control of mobile sensor networks with Markov switching topologies, ” ISA T ransactions , vol. 58, no. 9, pp. 206-213, Sept. 2015. [41] L. Dai, Singular Contr ol Systems , Springer , Berlin, 1989. [42] I. Masubuchi, Y . Kamitane, A. Ohara, and N. Suda, “ H ∞ control for descriptor systems: a matrix inequalities approach, ” Automatica , vol. 33, no. 4, pp. 669-673, Apr . 1997.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment