Design of Globally Exponentially Convergent Continuous Observers for Velocity Bias and State for Systems on Real Matrix Groups
We propose globally exponentially convergent continuous observers for invariant kinematic systems on finite-dimensional matrix Lie groups. Such an observer estimates, from measurements of landmarks, vectors and biased velocity, both the system state …
Authors: Dong Eui Chang
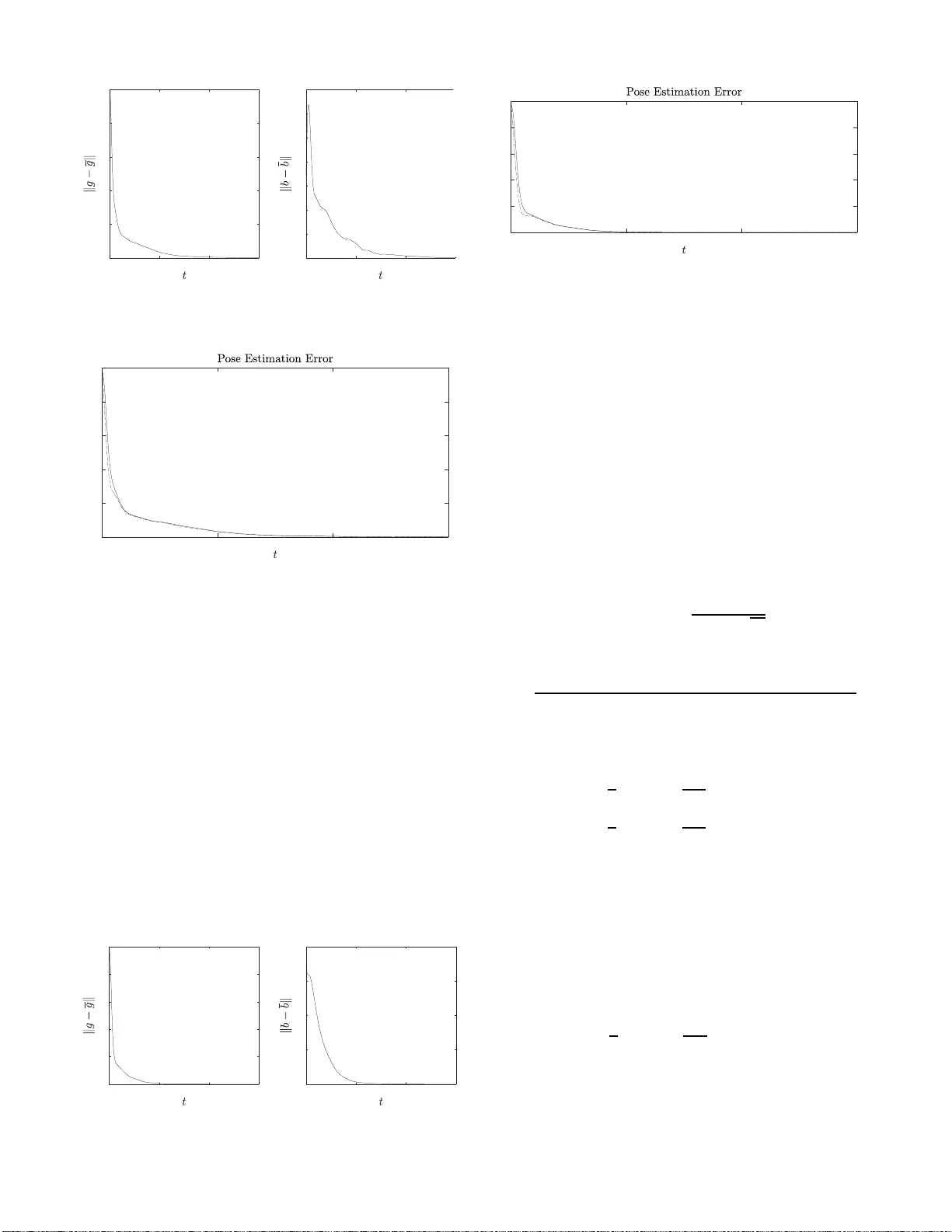
1 Design of Globally Expon entiall y Con v er gent Continuous Observe rs for V elocity Bias and State for Systems on Real Matrix Groups Dong Eui Chang Abstract —W e propose globally exponentially conv erg ent con- tinuous observ ers for in v ariant kinematic systems on finite- dimensional matrix Lie gro ups. Such an observ er estimates, from measureme nts of landmarks, vec tors and biased v elocity , both the system state a nd the unknown constant bias in velocity measureme nt, where the state belongs to the state-space Li e gro up and the velocity to the Lie algebra of the Lie group. The main technique is to embed a given system defined on a matrix Lie group into Euclidean space and build observers in th e Euclidean space. The theory is illustrated with the special Eu clidean group in thr ee dimensions. Index T erms —observe r , estimation, Lie gro up, velocity b ias I . I N T RO D U C T I O N Consider an inv ariant k inematic sy stem on a matrix Lie group G : ˙ g = g ξ with ( g , ξ ) ∈ G × g , wh e re G is em bedded in R n × n and g denotes the Lie algeb ra o f G . Suppose that the velocity ξ is measured with an additive unknown c o nstant bias as ξ m = ξ + b where b ∈ g is the constant un known bias. Suppo se also that we measure land marks and vectors such that an n × n matrix- valued sig n al A of the form A = F g or A = g − 1 F is av ailable, wher e F is an n × n invertible matrix. In this paper, we design continu ous ob ser vers that globally and exponentially estimate ( g , b ) with ξ m and A , where it is assumed th at the value of F is available. Rele vant works are listed in th e following. In [9], the authors propo sed contin uous ob servers tha t e stima te ( g , b ) with ξ m and ho mogen e ous outpu ts. The ir observers are unifo rmly locally expo nentially stable, but not globally expon e ntially stable. A similar work was done in [8 ] , wher e a gr adient- like innovation ter m was used in the observer design. Th e observers th erein are not globally exponentially stable but o nly unifor m ly loc a lly exponentially stable. Grad ient-like observers were also pro posed in [10], but these observers are not g lo bally exponentially conver gent either . T o th e best of our knowledge, our observers in the pr esent paper are th e fir st glob ally exp onentially co nvergent contin u- ous o bservers for velocity bias and state for k inematic systems on matrix Lie groups. One noticeab le difference between the ob ser vers in [8]– [ 10] and ours is that ou r obser vers are designed in R n × n × g instead of G × g , where G ⊂ R n × n , such that the Euclid ean structure o f R n × n is fu lly utilized without being con strained to the g roup structu re of G . This type of observers b uilt in Euclidean space is called g eometry- free and they have bee n widely used for SO(3 ) , e.g . [1], [11]. The paper is organized as fo llows. In Section II we p ropose various forms of globally expon entially conv ergent co ntinuou s observers for velocity bias and s tate for kinematic systems on matrix L ie grou ps. In Section III, we illustrate one of the observers proposed in Section II by app lying it to the spec ial Euclidean group SE(3) . Th e pa p er is concluded in Section IV. I I . M A I N R E S U LT S Let G b e a matrix Lie gro up that is a subgroup of GL( n ) = { A ∈ R n × n | det A 6 = 0 } , and let g den ote the Lie algebra of G . Since G is a subg roup fo GL( n ) , we may assume that g is a subalg ebra of ( R n × n , [ , ]) , where [ , ] is the usua l matrix co mmutator d e fined by [ A, B ] = AB − B A fo r all A, B ∈ R n × n . Le t π g : R n × n → g d enote the or thogon al projection onto g with respect to the Euclidea n inner pro duct h , i that is defin e d by h A, B i = tr ( A T B ) fo r A, B ∈ R n × n . Let kk d enote th e Euclidean o r Frobenius norm wh ich is defined b y k A k = p h A, A i for all A ∈ R n × n . For a squ are matrix A , λ minx ( A ) and λ max ( A ) denote the minimum eig en- value and the maximum eigenv alue of A , respectively . For any matrix A , σ min ( A ) and σ max ( A ) denote the minim u m sing ular value and the maximum sing ular value of A , respecti vely . For any A ∈ R n × n , k A k 2 = P n i =1 σ 2 i ( A ) , where σ i ( A ) ’ s are the singular values of A . W e have λ min ( A T A ) k B k 2 ≤ h AB , AB i ≤ λ max ( A T A ) k B k 2 for all A ∈ R n × m and B ∈ R m × ℓ , i.e. σ 2 min ( A ) k B k ≤ k AB k ≤ σ 2 max ( A ) k B k for all A ∈ R n × m and B ∈ R m × ℓ . Refer to [2] for more about Lie groups in the context of geom etric co ntrol and mechanics. A. Observer I The invariant kin ematic eq uation on a matrix Lie group G ⊂ R n × n is given by ˙ g = g ξ , (1) 2 where g ∈ G and ξ ∈ g . Suppo se that there is giv en an ar b itrary trajecto ry of th e system ( g ( t ) , ξ ( t )) ∈ G × g , 0 ≤ t < ∞ . W e m ake the following three assumptions. Assumption II.1. A matrix-va lu ed signa l A ( t ) ∈ R n × n is available th a t can be expr es sed as A = F g , (2) wher e F is a c onstant invertible matrix in R n × n and g ∈ G . Assumption II.2. A g - valued signal ξ m ( t ) with b ia s is avail- able a nd related to the true ξ ( t ) ∈ g of as fo llows: ξ m = ξ + b, wher e b ∈ g is an u nknown co n stant bia s vector . Assumption II .3. Ther e a r e kno wn co nstants B ξ > 0 and B b > 0 such th at k ξ ( t ) k ≤ B ξ for all t ≥ 0 and k b k ≤ B b . Ther e are n umbers L g > 0 an d U g > 0 such that L g ≤ σ min ( g ( t )) ≤ σ max ( g ( t )) ≤ U g for all t ≥ 0 , wher e th e knowledge on the values of L g and U g is not a ssume d . W e p ropose the following observer: ˙ ¯ A = ¯ Aξ m − A ¯ b + k P ( A − ¯ A ) , (3a) ˙ ¯ b = − k I π g ( A T ( A − ¯ A )) (3b) with k P > ( B ξ + B b ) and k I > 0 , wher e ( ¯ A, ¯ b ) ∈ R n × n × g is an estimate of ( A, b ) ∈ G × g . So, ( F − 1 ¯ A, ¯ b ) ∈ R n × n × g becomes an estimate of ( g , b ) ∈ G × g b y Assumption II.1. The global and exp o nentially convergent property o f this ob server is pr oven in the following theorem . Theorem II.4. Let E A = A − ¯ A, e b = b − ¯ b. Under Assumptio ns I I.1 – II. 3, for any k P > ( B ξ + B b ) an d k I > 0 there exist numbers a > 0 and C > 0 such tha t k E A ( t ) k + k e b ( t ) k ≤ C ( k E A (0) k + k e b (0) k ) e − at (4) for a ll t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . Pr oof. See Appen dix. Corollary II.5. Supp ose tha t A ssumptions II.1 – II.3 hold , and let E g = g − F − 1 ¯ A, e b = b − ¯ b. Then, th er e exis t numbers a > 0 and C > 0 such tha t k E g ( t ) k + k e b ( t ) k ≤ C ( k E g (0) k + k e b (0) k ) e − at (5) for a ll t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . Pr oof. Use k E g k / k F − 1 k ≤ k E A k ≤ k F kk E g k an d (4) with the constant C redefined a p propr iately . Namely , th e est imate ( F − 1 ¯ A ( t ) , ¯ b ( t )) con ver ges g lobally and expo nentially to the tru e value ( g ( t ) , b ) as t tends to ∞ . Remark II.6. W e can also build an observer that allows ¯ b to be in R n × n instead o f g . The modified observer is given by ˙ ¯ A = ¯ Aξ m − A ¯ b + k P ( A − ¯ A ) , (6a) ˙ ¯ b = − k I A T ( A − ¯ A ) , (6b) wher e ( ¯ A, ¯ b ) ∈ R n × n × R n × n . Notice that the pr o jection operator π g in (3b) is r emoved fr om (3b) to obtain (6b) . Theor em I I.4 a nd Cor ollary II.5 also ho ld for this o bserver , whose pr oof is almost iden tical to the pr oofs of Theor em II.4 and Cor ollary II .5, so it is left to the r eader . Remark II.7. Assump tion II.1 can b e r elaxed by allowing the ma trix F to be time-va rying. Mor e specifica lly , we make the following a ssumption: ther e are nu mbers ℓ min > 0 and ℓ max > 0 such that ℓ min ≤ σ min ( F ( t )) ≤ σ max ( F ( t )) ≤ ℓ max (7) for all t ≥ 0 . I n this ca se, we pr opose the follo wing observer: ˙ ¯ A = ¯ Aξ m − A ¯ b + k P ( A − ¯ A ) + ˙ F F − 1 A, ˙ ¯ b = − k I π g ( A T ( A − ¯ A )) with k P > 0 an d k I > 0 , where ( ¯ A, ¯ b ) ∈ R n × n × g is a n estimate o f ( A, b ) . It is not difficult to sh o w tha t Theorem II.4 and Cor o llary II.5 also hold fo r this observer with the relaxed assumption on F ( t ) as ab ove. Her e, the knowledge on the values o f ℓ min and ℓ max is not requir ed her e. Remark II.8. S ince the estima te F − 1 ¯ A may not lie in G in general, on e ma y need to pr oject it to G as an output of the observer althoug h F − 1 ¯ A ( t ) conver ges to g ( t ) ∈ G as t ten ds to infity . F or example, if G = SO(3) , th en the usua l polar decompo sition can be used to define a pr ojection fr om R 3 × 3 to SO(3) . Pr o jection fo r SE (3) will b e discussed in Section III. However , if one design s c ontr oller s in R n × n for an extension of (1) into R n × n as pr oposed in [4], then the dir ect use of F − 1 ¯ A in feedb ack would be fine. B. Observer II Recall the k in ematic eq uation in (1). W e now conside r a case wher e th e measuremen t matrix A is related to the true signal g ( t ) as A = g − 1 ( t ) F instead of A = F g ( t ) . Consequently , in place of Assumption I I.9, let us make the following assumption: Assumption II.9. A matrix-va lu ed signa l A ( t ) ∈ R n × n is available th a t can be expr essed as A = g − 1 F, (8) wher e F is a c onstant invertible matrix in R n × n and g ∈ G . By ( 1), A defined in ( 8) satisfies ˙ A = − ξ A. (9) Under Assumptio n s II.9, II. 2 and II. 3, we pr opose the follow- ing o b server: ˙ ¯ A = − ξ m ¯ A + ¯ bA + k P ( A − ¯ A ) , (10a) ˙ ¯ b = k I π g (( A − ¯ A ) A T ) (10b) 3 with k P > ( B ξ + B b ) and k I > 0 , wher e ( ¯ A, ¯ b ) ∈ R n × n × g is an estimate of ( A, b ) ∈ G × g . Theorem II.10 . F or the o bserver (1 0) , let E A = A − ¯ A, e b = b − ¯ b. Under Assumption s II.9, I I.2 an d II.3, for a ny k P > ( B ξ + B b ) and k I > 0 ther e exist numb ers a > 0 and C > 0 such that k E A ( t ) k + k e b ( t ) k ≤ C ( k E A (0) k + k e b (0) k ) e − at for a ll t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . Pr oof. See Appen dix. Corollary II.11. Consider the observer (10) . Suppo se tha t Assumptions I I.9, II.2 and I I.3 h old, and let E g = g − F ¯ A − 1 , e b = b − ¯ b. Then, th er e exis t numbers a > 0 and C > 0 such tha t k E g ( t ) k + k e b ( t ) k ≤ C ( k E g (0) k + k e b (0) k ) e − at for a ll t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . In other words, th e estimate ( F ¯ A ( t ) − 1 , ¯ b ( t )) co nverges globally a n d expo nentially to the true v alue ( g ( t ) , b ) as t tends to infinity . Remark II.12. If F ( t ) is time-varying such th at (7) is satisfied for a ll t ≥ 0 , the n (10 a) has o n ly to be modified to ˙ ¯ A = − ξ m ¯ A + ¯ bA + k P ( A − ¯ A ) + AF − 1 ˙ F while ( 10b) remains intact. W e now d eriv e from (3) various o bservers of concr ete form that estimate ( R, b ) fr om vector measureme nts. Assume tha t there is a set S = { s i , 1 ≤ i ≤ m } of m known fixed inertial vectors, wh ere each s i in S is a vector in R n , such that the rank of S is n . Assum e also tha t measurements of the vectors are m ade in the body-fixed frame a nd the set of the measured vectors is denoted b y C = { c i , 1 ≤ i ≤ m } and related to S as fo llows: c i = g − 1 s i , i = 1 , . . . , m, where F ∈ G . Let S = s 1 · · · s m , C = c 1 · · · c m (11) be n × m matrices made of the co lu mn vectors from S and C , respectively . Corollary II.13 . Let S and C be given in (1 1) . If there is a matrix W ∈ R m × n such tha t F := S W ha s rank n , th en (8 ) is satisfied b y A = C W and the o bserver (1 0) is applica ble. Pr oof. Tri vial. Remark II.14. Cor ollary II. 1 3 can be applied in several ways. F or example, the substitution o f W S T into W in Cor ollary II.13 wou ld yield F = S W S T , A = C W S T , wher e it is assumed that W is a n m × m matrix such tha t F h a s rank n . Likew ise, W in Cor ollary II.13 ca n be chosen such that F dep ends more nonlinea rly o n S . C. V ariants W e h ere propo se an o b server that is a variant of the observer (3) with A T replaced by A − 1 in (3b). Recall the kinematic equation (1), and under Assumptions I I.1 – II.3, we propo se the fo llowing new observer: ˙ ¯ A = ¯ Aξ m − A ¯ b + k P ( A − ¯ A ) , (12a) ˙ ¯ b = − k I π g ( A − 1 ( A − ¯ A )) (12b) with k P > (2 B ξ + B b ) and k I > 0 , where ( ¯ A, ¯ b ) ∈ R n × n × g is an estimate of ( A, b ) ∈ G × g . So, ( F − 1 ¯ A, ¯ b ) ∈ R n × n × g becomes an estimate of ( g , b ) ∈ G × g by Assumption I I.1. Theorem II.15 . F or the o bserver (1 2) , let E A = A − ¯ A, e b = b − ¯ b. Under Assumptions II.1 – II .3, for an y k P > (2 B ξ + B b ) and k I > 0 ther e exist n umbers a > 0 and C > 0 such that k E A ( t ) k + k e b ( t ) k ≤ C ( k E A (0) k + k e b (0) k ) e − at for a ll t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . Pr oof. See Appendix . W e also pro pose a variant o f the observer (10) with A T replaced by A − 1 in (10b). Under Assumptio ns II.2, II.3 and II.9, we pro pose the f ollowing n ew observer: ˙ ¯ A = − ξ m ¯ A + ¯ bA + k P ( A − ¯ A ) , (13a) ˙ ¯ b = k I π g (( A − ¯ A ) A − 1 ) (13b) with k P > (2 B ξ + B b ) and k I > 0 , where ( ¯ A, ¯ b ) ∈ R n × n × g is an estimate of ( A, b ) ∈ G × g . So, ( F ¯ A − 1 , ¯ b ) ∈ R n × n × g becomes an estimate of ( g , b ) ∈ G × g by Assumption I I.1. Theorem II.16 . F or the o bserver (1 3) , let E A = A − ¯ A, e b = b − ¯ b. Under Assumption s II.9, I I.2 an d II.3, for a ny k P > ( B ξ + B b ) and k I > 0 the re exist numbers a > 0 and C > 0 su ch that k E A ( t ) k + k e b ( t ) k ≤ C ( k E A (0) k + k e b (0) k ) e − at for a ll t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . Pr oof. Omitted since it is similar to the proof of Th e o rem II.15. Remark II.17. 1. Cor ollaries I I .5 an d II. 11 also ho ld fo r the observers (12) and ( 13) , r espectively . 2. Cor ollary II.13 and Rema rk II.14 also ho ld true for the observer (13) . 4 I I I . E X A M P L E : A P P L I C A T I O N T O SE(3) W e now illustrate the theory presen ted in Section II with the special Euclidean gr o up on R 3 . The gro up can b e expressed in homog eneous co ordinates as SE(3) = R x 0 1 | R ∈ SO(3) , x ∈ R 3 , where SO(3) = { R ∈ R 3 × 3 | R T R = I , det R = 1 } is the special orthog o nal g roup whose L ie alg ebra is so (3) = { A ∈ R 3 × 3 | A T = − A } . It is easy to see that SE(3) is a sub group of GL(4) = { A ∈ R 4 × 4 | det A 6 = 0 } . Th e Lie alg ebra of SE(3) is then given b y se (3) = ˆ Ω v 0 0 for some Ω ∈ R 3 , x ∈ R 3 , where the h a t map ∧ : R 3 → so (3) is defined s uch that ˆ xy = x × y fo r all x, y ∈ R 3 . In h omogen eous coo rdinates, landmark s to be m easured with sensor s are expressed in the form x 1 , x ∈ R 3 , (14) and such vectors at infinity as the gravity or the Earth’ s magnetic field are expressed in the form x 0 , x ∈ R 3 . (15) The orthogo nal pr ojection π se (3) : R 4 × 4 → se (3) is g iven as follows: For A ∈ R 4 × 4 giv en by A = B x y T z , B ∈ R 3 × 3 , x ∈ R 3 × 1 , y ∈ R 3 × 1 , z ∈ R , we h av e π se (3) ( A ) = 1 2 ( B − B T ) x 0 1 × 3 0 ∈ se (3) . Suppose tha t we m easure i n the body frame the following inertial vectors given by s 1 = ( e 1 , 1) , s 2 = ( e 2 , 1) , s 3 = ( e 3 , 1) , s 4 = ( e 1 + e 3 , 1) , s 5 = ( − e 3 , 0) , where { e 1 , e 2 , e 3 } is the standar d basis of R 3 and s 5 represents the gravity d ir ection. Suppose the measured signal matrix A ( t ) is given by A ( t ) = g ( t ) − 1 F = g ( t ) − 1 S W S T = C ( t ) W S T with F = S W S T and C ( t ) = g ( t ) − 1 S , where S = s 1 s 2 s 3 s 4 s 5 . Here, each column in th e C ( t ) ma tr ix is wha t is measured in the bo dy-fixed f rame. For convenience, we set W = I 4 × 4 although any 4 × 4 matrix su ch that S W S T is in vertible would work f or W . Suppose that a set o f tru e trajectories ( R ( t ) , x ( t )) ∈ SE(3) and (Ω( t ) , V ( t )) ∈ R 3 × R 3 are given as fo llows: R ( t ) = exp( t ˆ e 1 ) exp( t ˆ e 3 ) exp( t ˆ e 1 ) , (16) x ( t ) = (cos t, sin t, cos t ) , (17) Ω( t ) = (1 + co s t, sin t − sin t cos t, cos t + sin 2 t ) , (18) V ( t ) = R T ( t ) ˙ x ( t ) , (19) where Ω( t ) satisfies ˆ Ω( t ) = R T ( t ) ˙ R ( t ) . Assume th at the unknown constant gyro bias b Ω and the unkn own constan t velocity bias b v are respe cti vely giv en by b Ω = (1 , 0 . 5 , − 1) , b v = (0 . 5 , − 0 . 5 , 0 . 5) . (20) W e use th e o bserver of th e form (10). Th e gains are chosen as k P = 4 an d k I = 0 . 7 5 , and the initial state of the observer is given by ¯ A (0) = ¯ g − 1 0 F where ¯ g 0 = " exp( π 2 ˆ e 1 ) 0 3 × 1 0 1 × 3 1 # and ¯ b Ω (0) = (0 , 0 , 0) , ¯ b v (0) = (0 , 0 , 0) . The simulation results are p lo tted in Fig. 1, wh ere the pose estimation err or k g ( t ) − ¯ g ( t ) k with ¯ g ( t ) := F ¯ A ( t ) − 1 ∈ R 4 × 4 , and the bias estimation error k b − ¯ b ( t ) k are plotted. It can be seen that b oth e stima tio n error s co n verge we ll to zero as theoretically p redicted. T o examine if the imag e trajectory of ¯ g ( t ) under a p rojection onto SE (3) also co n verges to g ( t ) , let us defin e a projec tio n pro j : R 4 × 4 → SE(3) as follows: for any ¯ g = ¯ g 1 ¯ g 2 ¯ g 3 ¯ g 4 ∈ R 4 × 4 with ¯ g 1 ∈ R 3 × 3 , ¯ g 2 ∈ R 3 × 1 , ¯ g 3 ∈ R 1 × 3 , and ¯ g 4 ∈ R , pro j(¯ g ) := ¯ g 1 , SO(3) ¯ g 2 0 1 × 3 1 ∈ SE(3) , (21) where ¯ g 1 , SO(3) denotes the SO(3) factor in p olar d e composi- tion of ¯ g 1 . For conv enience, let ¯ g SE(3) ( t ) := pr o j( ¯ g ( t )) . The pose estimatio n err or k g ( t ) − ¯ g SE(3) ( t ) k by ¯ g SE(3) ( t ) is plotted in Fig. 2 along with the p ose estimation error k g ( t ) − ¯ g ( t ) k by ¯ g ( t ) tha t was obtained in the simulatio n. It can b e seen in the figure that ¯ g ( t ) stays very clo se to its SE(3) factor ¯ g SE(3) ( t ) , and ¯ g SE(3) ( t ) also co n verges to the tru e pose g ( t ) as time tend s to infinity . For the pu rpose of com p arison, we n ow apply the observer (13) with the same setting except the observer gains which are now chosen as k P = 4 and k I = 4 . The estimation results ar e plotted in Fig. 3. It can be seen th a t the bias estimation erro r by the o bserver (13) in Fig. 3 con verges fast w ith out overshoot in comp arison with the estimation error by ( 10) that is plotted in Fig. 1. The SE(3) part o f ¯ g ( t ) com puted by the projection (21) also conver ges well to the tr ue signal g ( t ) as shown in Fig. 4. Remark III.1. Th er e have been papers on estimatio n of po se and velocity measur ement bia s for SE(3) , e.g. [7 ], [12], [13 ] and refer enc es th e rein. A g lobally exponentia lly conver g ent hybrid (no t continuo us) observer is p r oposed in [1 2], an d a non-g lobal exponentia lly conver gent ob server is pr oposed in [13]. A gradient-like observer design on SE(3 ) with system outputs on the r eal p r ojective space was p r oposed in [7]. Refer 5 0 5 10 15 0 0.5 1 1.5 2 2.5 0 5 10 15 0 0.5 1 1.5 2 2.5 3 3.5 Fig. 1. The pose estimat ion error k g ( t ) − ¯ g ( t ) k and the veloc ity bias estimati on error k b − ¯ b ( t ) k by the observ er (10). 0 5 10 15 0 0.5 1 1.5 2 2.5 Fig. 2. T wo pose estimation errors by the observer (10 ): k g ( t ) − ¯ g ( t ) k by the observ er (solid) and k g ( t ) − ¯ g SE(3) ( t ) k by the SE(3) fa ctor ¯ g SE(3) ( t ) of ¯ g ( t ) obtaine d through the projection (21) (dash-dot ). to [6] for a glob al formulatio n of extended Kalma n filter on SE(3) for geome tric contr ol of a dr one. I V . C O N C L U S I O N W e hav e successfully designed g lobally exponentially con- vergent co ntinuou s observers for kinem atic inv ariant systems on finite-dimensio n al matrix Lie groups that estimate s tate and constant velocity bias from measur e m ents of landma r ks, vectors and biased velocity . W e have app lied the result to the special Euclid ean g r oup SE(3) and carried o ut a simu lation study to illustrate an excellent perfor m ance o f the observer for SE(3) . W e p lan to apply the result to drone contr o l [ 5] and to co mbine it with de e p neur al networks [3] . 0 5 10 15 0 0.5 1 1.5 2 2.5 0 5 10 15 0 0.5 1 1.5 2 Fig. 3. The pose estimat ion error k g ( t ) − ¯ g ( t ) k and the velocit y bias estimati on error k b − ¯ b ( t ) k by the observ er (13). 0 5 10 15 0 0.5 1 1.5 2 2.5 Fig. 4. T wo pose estimation errors by the observer (13): k g ( t ) − ¯ g ( t ) k by the observ er (solid) and k g ( t ) − ¯ g SE(3) ( t ) k by the SE(3) fa ctor ¯ g SE(3) ( t ) of ¯ g ( t ) obtaine d through the projection (21) (dash-dot ). A P P E N D I X Pr oof of Th eor em II.4 Pr oof. From (1) an d Assumptio n II. 1, A ( t ) satisfies ˙ A = Aξ . (2 2 ) By Assum ption II.2, the observer (3) can b e written as ˙ ¯ A = ¯ A ( ξ + b ) − A ¯ b + k P E A , (23a) ˙ ¯ b = − k I π g ( A T E A ) . (23b) By Assum ption II.3, there is a nu mber ǫ such that 0 < ǫ < min H, 1 k F k U g √ k I , where H = 4( k P − B ξ − B b ) L 2 g λ min ( F T F ) (4 k I L 2 g λ min ( F T F ) + ( k P + B b + 2 B ξ ) 2 ) U 2 g k F k 2 . The following three q uadratic functio ns of ( k E A k , k e b k ) are then all po sitive definite: V 1 ( k E A k , k e b k ) = 1 2 k E A k 2 + 1 2 k I k e b k 2 − ǫU g k F kk E A kk e b k , V 2 ( k E A k , k e b k ) = 1 2 k E A k 2 + 1 2 k I k e b k 2 + ǫU g k F kk E A kk e b k , V 3 ( k E A k , k e b k ) = ( k P − ( B ξ + B b ) − ǫk I U 2 g k F k 2 ) k E A k 2 + ǫλ min ( F T F ) L 2 g k e b k 2 − ǫ ( k P + B b + 2 B ξ ) U g k F kk E A kk e b k . Hence, th ere are numb ers α > 0 and β > 0 such that V 2 ≤ αV 1 , β V 2 ≤ V 3 . (24) Let V ( E A , e b ) = 1 2 k E A k 2 + 1 2 k I k e b k 2 + ǫ h E A , Ae b i , which satisfies V 1 ( k E A k , k e b k ) ≤ V ( E A , e b ) ≤ V 2 ( k E A k , k e b k ) (25) for all ( E A , e b ) ∈ R n × n × g by th e Cauchy-Schwarz inequ a lity and k A k = k F g k ≤ k F k U g . From (22), (23), an d the 6 assumption of the bias b b eing co nstant, it fo llows that the estimation er ror ( E A , e b ) ob eys ˙ E A = E A ( ξ + b ) − Ae b − k P E A , ˙ e b = k I π g ( A T E A ) . Along any trajectory o f th e comp osite system consisting of the rigid bod y (1) and the ob server ( 3 ), dV dt = h E A , E A ( ξ + b ) − Ae b − k P E A i + h e b , π g ( A T E A ) i + ǫ h E A ( ξ + b ) − Ae b − k P E A , Ae b i + ǫ h E A , Aξ e b i + ǫk I h E A , A π g ( A T E A ) i ≤ − ( k P − ( B ξ + B b ) − ǫk I U 2 g k F k 2 ) k E A k 2 − ǫλ min ( F T F ) L 2 g k e b k 2 + ǫ ( k P + B b + 2 B ξ ) U g k F kk E A kk e b k = − V 3 ≤ − β V 2 ≤ − β V , where th e following have been u sed : h E A , E A ( ξ + b ) i ≤ k E A k 2 ( B ξ + B b ) , h E A , Ae b i = h A T E A , e b i = h π g ( A T E A ) , e b i , h Ae b , Ae b i ≥ λ min ( F T F ) k g e b k 2 ≥ λ min ( F T F ) L 2 g k e b k 2 , h E A , A π g ( A T E A ) i = k π g ( A T E A ) k 2 ≤ k A T E A k 2 ≤ U 2 g k F k 2 k E A k 2 . Hence, V ( t ) ≤ V (0) e − β t for all t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . I t fo llows fro m (24) and (25) that V 1 ( t ) ≤ V ( t ) ≤ V (0) e − β t ≤ V 2 (0) e − β t ≤ αV 1 (0) e − β t for all t ≥ 0 and all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g . Since 0 < ǫ < 1 / ( k F k U g √ k I ) , th e ma p define d by ( x 1 , x 2 ) 7→ r 1 2 x 2 1 + 1 2 k I x 2 2 − ǫU g k F k x 1 x 2 is a nor m on R 2 , where ( x 1 , x 2 ) ∈ R 2 , which is equivalent to the 1 -norm on R 2 since all norm s are equiv alent on a finite- dimensiona l vector space . Hence, V 1 ( t ) ≤ αV 1 (0) e − β t implies that th ere exists C > 0 such that (4) holds fo r all t ≥ 0 an d all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g , wh ere a = β / 2 . Pr oof of Th eor em II.10 Pr oof. By Assumption II.3, ther e is a numb er ǫ such that 0 < ǫ < min H, L g k F k √ k I , where H = 4( k P − B ξ − B b ) L 2 g λ min ( F T F ) (4 k I λ min ( F T F ) + ( k P + B b + 2 B ξ ) 2 U 2 g ) k F k 2 . The following three q uadratic functio ns of ( k E A k , k e b k ) are then all po sitive definite: V 1 ( k E A k , k e b k ) = 1 2 k E A k 2 + 1 2 k I k e b k 2 − ǫ L g k F kk E A kk e b k , V 2 ( k E A k , k e b k ) = 1 2 k E A k 2 + 1 2 k I k e b k 2 + ǫ L g k F kk E A kk e b k , V 3 ( k E A k , k e b k ) = k P − ( B ξ + B b ) − ǫk I k F k 2 L 2 g k E A k 2 + ǫλ min ( F T F ) U 2 g k e b k 2 − ǫ ( k P + B b + 2 B ξ ) L g k F kk E A kk e b k . Hence, there are n umbers α > 0 an d β > 0 such th at (24) holds. L et V ( E A , e b ) = 1 2 k E A k 2 + 1 2 k I k e b k 2 − ǫ h E A , e b A i , which satisfies (25). Since b is constant by assumption, it follows from (9) and (10) that ˙ E A = − ξ m E A + e b A − k P E A , ˙ e b = − k I π g ( E A A T ) . Along any trajectory of the comp osite system consisting of the rigid bod y (1) and the ob server ( 1 0), dV dt = h E A , − ξ m E A + e b A − k P E A i − h e b , π g ( E A A T ) i − ǫ h− ξ m E A + e b A − k P E A , e b A i + ǫ h E A , e b ξ A i + ǫk I h E A , π g ( E A A T ) A i ≤ − k P − ( B ξ + B b ) − ǫk I k F k 2 L 2 g k E A k 2 − ǫλ min ( F T F ) U 2 g k e b k 2 + ǫ ( k P + B b + 2 B ξ ) k F k L g k E A kk e b k = − V 3 ≤ − β V 2 ≤ − β V . The re st of the p r oof is iden tical to th e co rrespon ding part in the pr o of of Theorem I I.4, so it is omitted. Pr oof of Th eor em II.15 Pr oof. The measured matrix A = F g o beys (22) L e t E A = I − A − 1 ¯ A, e b = b − ¯ b. From ( 22) and (12), ˙ E A = E A ξ m − ξ E A − e b − k P E A ˙ e b = k I π g ( E A ) . There is an ǫ > 0 such that 0 < ǫ < min 1 √ k I , 4( k P − 2 B ξ − B b ) 4 k I + ( k P + 2 B ξ + B b ) 2 . 7 The following three q uadratic functio ns of ( k E A k , k e b k ) are then all po sitive definite: V 1 ( kE A k , k e b k ) = 1 2 kE A k 2 + 1 2 k I k e b k 2 − ǫ kE A kk e b k , V 2 ( kE A k , k e b k ) = 1 2 kE A k 2 + 1 2 k I k e b k 2 + ǫ kE A kk e b k , V 3 ( kE A k , k e b k ) = ( k P − (2 B ξ + B b ) − ǫk I ) kE A k 2 + ǫ k e b k 2 − ǫ ( k P + B b + 2 B ξ ) k E A kk e b k . Hence, there are numb ers α > 0 a nd β > 0 suc h that (24) holds. L et V ( E A , e b ) = 1 2 kE A k 2 + 1 2 k I k e b k 2 + ǫ hE A , e b i , which satisfies (25) fo r all ( E A , e b ) ∈ R n × n × g . It is easy to show that along any trajecto ry of th e compo site system consisting o f the rigid b ody (1) and the observer (1 2), ˙ V ≤ − V 3 ≤ − β V 2 ≤ − β V . As in the pro of of Th eorem II . 4, it is east to show that there are nu mbers ˜ C > 0 an d a > 0 such that kE A ( t ) k + k e b ( t ) k ≤ ˜ C ( kE A (0) k + k e b (0) k ) e − at (26) for all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g and all t ≥ 0 . Since E A = I − A − 1 ¯ A = A − 1 E A or E A = A E A = F g E A , we have σ min ( F ) L g kE A k ≤ k E A k ≤ σ max ( F ) U g kE A k . (27) It follows from (2 6) and ( 27) that there is a nu mber C > 0 such tha t k E A ( t ) k + k e b ( t ) k ≤ C ( k E A (0) k + k e b (0) k ) e − at for all ( ¯ A (0) , ¯ b (0)) ∈ R n × n × g an d all t ≥ 0 . R E F E R E N C E S [1] P . Batista, C. Silvestre, and P . Oli vei ra, “Globall y exponent ially stable cascade observers for attitude estimation, ” Contr ol E nginee ring P ractice , 20, 148 – 155, 2012. [2] A.M. Bloch, Nonholo nomic Mechani cs and Con tr ol , Sprin ger , 2003. [3] A.L. Cateri ni and D . E. Chang, Deep Neural Networks in a Mathematic al F r amew ork, Springe r , 2018. [4] D.E. Chang, “On controll er design for systems on manifolds in Eu- clide an spac e, ” J ourna l on Robust and Nonlinear Contr ol , 28(16 ), 4981 – 4998, 2018. [5] D.E. Chang and Y . Eun, “Global chartwise feedba ck linear izati on of the quadcopt er with a thrust positi vi ty preser ving dynamic exte nsion, ” IEEE T r ans. Automatic Contr ol, 62 (9), 4747 – 4752, 2017. [6] F .A. Goodarzi and T . Lee, “Global formulati on of an e xtende d Kalman filter on SE(3) for geometric control of a quadrotor UA V , ” J Intell R obot Syst , 88, 395 – 413, 2017. [7] M.-D. Hua, T . Hamel, R. Mahon y and J. Trumpf, “Gradi ent-li ke observer design on the special Euclidea n group SE(3) with system outputs on the real projecti v e space, ” In Proc. 54th IEEE Confe re nce on Decisio n and Contr o l, 2139 – 2145, Osaka J apan, 2015. [8] A. Khosravian , J. Trumpf, R. Mahony , and C. Lageman, “Bias estimation for in v aria nt systems on Lie groups with homogeneou s outputs, ” In Proc. IEEE Conf. on Decision and Contr ol , 4454 – 4460, Florence , Italy , December 201 3. [9] A. Khosravian , J. Trumpf, R. Mahony , and C. Lageman, “Observe rs for in v a riant systems on Lie groups with biased input measurements and homogeneou s outputs, ” Automatica, 55, 19 – 26, 2015. [10] C. L ageman, J. Trumpf, and R. Mahony , “Gradien t-lik e observ ers for in v a riant dynamics on a Lie group, ” IE EE T ra nsaction s on Automat ic Contr o l, 55(2), 367377, 2010. [11] P . Martin and I. Sarras, “ A global observ er for atti tude and gyro biases from vec tor measurements, ” IF AC P apersOnLine , 50-1, 15409 – 15415, 2017. [12] M. W ang and A. T ay ebi, “On the design of hybrid pose and vel ocity-b ias observe rs on Lie group SE(3), ” 2018, arXiv P re print arXiv: 1805.00897. [13] J.F . V asconcelos, R. Cunha, C. Silvestre, and P . Oli vei ra. “ A nonl inear position and atti tude observer on SE(3) using landmark measurements, ” Systems & Contr ol Let ter s, 59 (3-4), 155 – 166, 2010.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment