Experimental Validation of Stable Coordination for Multi-Robot Systems with Limited Fields of View using a PortableMulti-Robot Testbed
In this paper, we address the problem of stable coordinated motion in multi-robot systems with limited fields of view (FOVs). These problems arise naturally for multi-robot systems that interact based on sensing, such as our case study of multiple un…
Authors: Pratik Mukherjee, Matteo Santilli, Andrea Gasparri
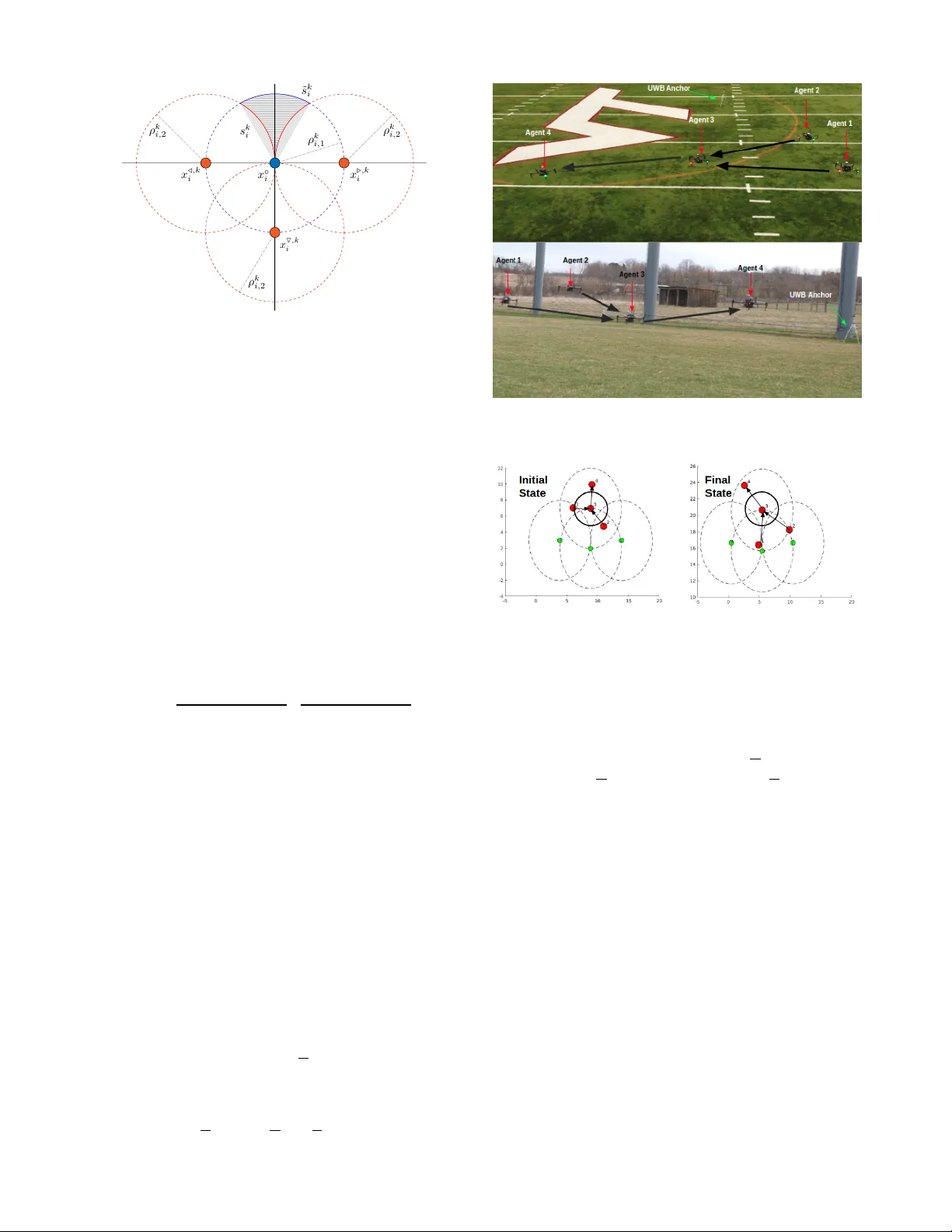
Experimental V alidation of Stable Coordination f or Multi-Robot Systems with Limited Fields of V iew using a P ortable Multi-Robot T estbed EXTENDED ABSTRA CT Pratik Mukherjee 1 , Matteo Santilli 2 , Andrea Gasparri 2 and Ryan K. W illiams 1 I . I N T RO D U C T I O N In this paper , we address the problem of stable coordinated motion in multi-robot systems with limited fields of view (FO Vs). These problems arise naturally for multi-robot systems that interact based on sensing, such as our case study of multiple unmanned aerial vehicles (U A Vs) each equipped with sev eral cameras that are used for detecting neighboring U A Vs. Related work can be separated into two topics: asymmetric motion control and applications of perception in multi-robot systems. T opology control for directed graphs is demonstrated in recent e xamples [1]–[3] focusing on overcoming the theoret- ical shortcuts that are lost when the symmetry assumption is broken. Sev eral recent works hav e exploited advanced perception in multi-robot systems, with examples including [4] which achiev es multi-tar get tracking with camera-equipped unmanned aerial vehicles (U A Vs), [5] which applies collabor- ativ e structure from motion for U A V formation control and [6] which demonstrates a distrib uted optimization framew ork for multi-robot collaborativ e tasks using vision. In this reg ard, our contribution is tw ofold. First, we extend our frame work [3] to study stable motion and distributed topology control for multi-robot systems with limited FO Vs. Then, we provide experimental results with a team of DJI Matrice 100 UA Vs performing motion control with limited FO Vs to demonstrate the proposed control frame work. I I . S TAB L E D I R E C T E D C O O R D I N A T I O N W I T H F OV S Potential-based control design is a commonly used frame- work for controlling multi-robot systems [7]–[15]. The basic idea is to encode the energy of a system as a potential function V ( x ( t )) ∈ R + such that the desired configurations of the multi-robot system correspond to critical points. For a re vie w of stable motion framew ork for multi-robot systems with directed interactions we refer the reader to [3]. Notably , the underlying assumption of this stable motion with limited FO V framew ork is that each robot has its own proximity-limited communication and sensing capability described by two radii 1 P . Mukherjee and R.K. W illiams are with Electrical and Computer Engineering Department, V irginia Polytechnic Institute and State Univ ersity , Blacksbur g, V A USA, { mukhe027, rywilli1 } @vt.edu 2 M. Santilli and A. Gasparri are with the En- gineering Department, Roma T re University Roma, 00146, Italy , matteo.santilli@uniroma3.it, gasparri@dia.uniroma3.it ρ i,c , ρ i,s ∈ R + , ∀ i ∈ { 1 , . . . , n } , within which sensing and communication can occur for each robot, respectiv ely . In this re gard, let us denote with G FO V s = {V , E FO V s } the interaction graph encoding pairwise sensing interactions with limited field of view with node set V , [ v 1 , ..., v n ] and edge set E FO V s ⊆ V × V . At this point, let us introduce an extended state x i defined as x i = h x ◦ i T , x /, 1 i T , x O , 1 i T , x ., 1 i T , . . . . . . , x /,m i i T , x O ,m i i T , x .,m i i T i T for each robot composed of the robot location itself, that is x ◦ i = x i , and a set of virtual points { x /,k i , x O ,k i , x .,k i } that mov e as if the y were rigidly attached to a robot i for each FO V . Note that, the position of each set of virtual points { x /,k i , x O ,k i , x .,k i } is defined according to the orientation θ k i of the FO V to which such set is associated, that is x τ ,k i = R τ ,k i ( x i ) x i + t τ ,k i ( x i ) where { R τ ,k i ( x i ) , t τ ,k i ( x i ) } are pairs of proper rotation matrices and translation vectors and τ is an element of the set T , { , O , } denoting the virtual points. At this point, for each robot i we can introduce an approx- imation ˜ s k i of the k -th FO V (circular or spherical sector) s k i as ˜ s k i = n x ∈ R d : k x ◦ i − x k ≤ ρ k i, 1 ∧ k x τ ,k i − x k ≥ ρ k i, 2 o (1) for all τ ∈ T and ρ k i, 1 , ρ k i, 2 ∈ R + two radii chosen in such a way to approximate the k -th FO V(circular or spherical sector) of the i -th robot as defined by s ( x i , θ k i , α k i , ρ k i,s ) , where ∧ is the logical “and” operator . Therefore, it follo ws that gi ven two robots i and j with state x i and x j respectiv ely , we say that the robot j is within the limited sensing field of vie w of robot i if there exists at least one approximation 1 ˜ s k i with k ∈ { 1 , . . . , m i } , such that x j ∈ ˜ s k i . The reader is referred to Figure 1 for a graphical representation of the set of logical conditions giv en in (1). T o approximate any desired pairwise sensing interac- tion with limited field of view , the idea is that for each edge ( i, j ) ∈ G FO V s we can use a set of virtual points { x /,k i , x O ,k i , x .,k i } along with the actual robot location x ◦ i 1 If there is more than one circular (spherical) sector for which x j ∈ ˜ s k i then we assume robot i locally selects the best one according to some sensing metric. This guarantees that our sensing graph does not become a multigraph. ˜ s k i x ◦ i x ,k i x ,k i ρ k i, 1 ρ k i, 2 ρ k i, 2 s k i ρ k i, 2 x ,k i Fig. 1. Approximation ˜ s k i of the k -th circular sector s k i for the limited field of view of an robot i by means of the set of logical conditions gi ven in (1). to describe the desired interaction by means of a proper combination of gradients. This allows us to deri ve a modeling of the multi-robot system with limited field of view , which we will refer to as the extended system that is amenable to the theoretical framew ork in [3]. Let us now consider the maintenance of a desired topological property P as the design objectiv e for the pairwise directed sensing interaction with limited field. More specifically , to the scope of this paper , let us assume the topological property of interest to be the maintenance of a directed link ( i, j ) ∈ E FO V s . Notably , this objectiv e can be translated in a setting with limited field of view by considering the follo wing extended dynamics of each robot i : ˙ x ◦ i = − X j ∈N + i ∇ x ◦ i V ◦ ij + X τ ∈T ∇ x τ,k j i V τ ,k j ij ! | {z } u i (2) with ˙ x τ ,q i = u i , q = 1 , . . . , m i for each virtual point τ ∈ T , where N + i = j ∈ V , | ( i, j ) ∈ E FO V s is defined according to (1) , k j denotes the index k for which x j ∈ ˜ s k i with k ∈ 1 , . . . , m i and the potentials V ◦ ij ( k x ◦ i − x j k ) , V τ ,k j ij ( k x τ i − x j k ) can be chosen such that V ◦ ,k j ij ( k x ◦ i − x j k ) → ∞ as k x ◦ i − x j k → ρ k i, 1 , V τ ,k j ij ( k x τ i − x j k ) → ∞ as k x τ i − x j k → ρ k i, 2 . (3) Interestingly , two things can be noticed from (2) : i) the actual dynamics of the robot x ◦ i is influenced by the interactions of its m i sets of virtual points { x /,k i , x O ,k i , x .,k i } , and ii) the dynamics of the m i sets of virtual points { ˙ x /,k i , ˙ x O ,k i , ˙ x .,k i } are identical to the actual dynamics of the robot ˙ x ◦ i being them rigidly attached to it. W e can now study the stability of a multi-robot system x = [ x T 1 , . . . , x T n ] T with limited field of vie w , by checking the stability of its extended version x = [ x 1 T , . . . , x n T ] T . T o this end, starting from the interaction graph G FO V s = {V , E FO V s } , which encodes the pairwise interactions with limited field of view , we require a systematic way for constructing the interaction graph G FO V s = {V FO V , E FO V s } that encodes the Fig. 2. Four DJI Matrice 100s forming and maintaining a preselected stable directed interaction graph in outdoor (bottom) and indoor(top) en vironments. Fig. 3. Initial and final states of the all agents(red circles) in an outdoor experiment with agent 4 in agent 3’ s FOV(one forw ard facing circular sector) represented by FO V radii of the three virtual points(green circles) of agent 3 and the collision radius represented by solid black circle around agent 3. equiv alent pairwise interactions with limited field of view for its modeling based on the extended system. Indeed, this will permit to build the incidence matrix B and the directed incidence matrix B + associated to the graph G FO V s which are required to check the stability of the system by inspecting its extended system as per Theorem 3 . 1 in [3]. Intuitiv ely , the idea is to: i) consider an extended state with 4 |E s | virtual points taken as replica of the actual agents; ii) perform a suitable algebraic manipulation of the e xtended state to zero out portions of the contributions corresponding to non- interacting virtual points and iii) finally apply Theorem 3 . 1 from [3] on the resulting extended states, yielding guaranteed stability . I I I . P O RTA BL E M U L T I - R O B OT E X P E R I M E N TA L S E T U P W e deployed a team of DJI Matrice 100 U A Vs and used an ultra-wideband (UWB) system, Pozyx [16], for localization of the U A Vs to control a stable FO V topology according to our theoretical results. T o conduct e xperiments of topology control using onboard UWB localization, we place six Pozyx anchor UWB nodes in the en vironment. Individual UWB tags are then mounted on each of the UA Vs from which the position measurement is obtained. In the experiments Fig. 4. Computed velocity reference from FO V controller for agents 1,2 and 3 from outdoor experiment with agent 4 recei ving a predetermined velocity . Fig. 5. Pozyx position measurement data for agents from outdoor experiment with induced noise from windy outdoor conditions. conducted, we demonstrate limited FO V topology control of four U A Vs operating in an area of 30 m × 20 m. A stable directed interaction graph was preselected as represented in Figures 2and 3. This graph is maintained by all agents during experimentation.Here, we present the results from an outdoor experiment conducted at the V irginia T ech Drone Park facility . 1) Outdoor Dr one P ark : W ith wind speeds of approx- imately 10 mph, Figures 4 and 5 show the results of the outdoor experiment. There is some induced noise from the en vironmental disturbance e vident in the position measurement data in Figure 5. Howe ver , the controller appears to beha ve appropriately , with agents 1 and 2 moving in and out of each other’ s collision radii (region in and around red circle in figure 5 ). The initial and final state of the agents can be seen in figure 3, where all agents ha ve still maintained the original stable graph. I V . C O N C L U S I O N S In this paper,we extended a framew ork we developed for studying stable motion and distrib uted topology control for multi-robot systems with directed interactions to the case of a multi-robot system with limited fields of vie w . Then, we provided experimental results with a team of DJI Matrice 100 UA Vs that demonstrated the effecti veness of the control frame work and sho wcased a portable multi-r obot experimental setup . R E F E R E N C E S [1] M. M. Asadi, A. Ajorlou, and A. G. Aghdam, “Distrib uted control of a network of single integrators with limited angular fields of view , ” Automatica , v ol. 63, pp. 187–197, 2016. [2] L. Sabattini, C. Secchi, and N. Chopra, “Decentralized estimation and control for preserving the strong connectivity of directed graphs, ” IEEE T rans Cybern , vol. 45, no. 10, pp. 2273–2286, Oct. 2015. [3] P . Mukherjee, A. Gasparri, and R. K. Williams, “Stable motion and distributed topology control for multi-agent systems with directed interactions, ” in Decision and Contr ol (CDC), 2017 IEEE 56th Annual Confer ence on , 2017. [4] P . T okekar , V . Isler , and A. Franchi, “Multi-target visual tracking with aerial robots, ” in 2014 IEEE/RSJ International Conference on Intellig ent Robots and Systems . IEEE, 2014, pp. 3067–3072. [5] E. Montijano, E. Cristofalo, D. Zhou, M. Schw ager, and C. Sag ¨ u ´ es, “V ision-Based distributed formation control without an external posi- tioning system, ” IEEE T rans. Rob . , vol. 32, no. 2, pp. 339–351, Apr . 2016. [6] R. Tron, J. Thomas, G. Loianno, K. Daniilidis, and V . K umar, “ A distributed optimization framework for localization and formation control: Applications to vision-based measurements, ” IEEE Contr ol Systems Magazine , vol. 36, no. 4, pp. 22–44, Aug 2016. [7] D. E. Koditschek and E. Rimon, “Robot navigation functions on manifolds with boundary , ” Advances in Applied Mathematics , vol. 11, no. 4, pp. 412 – 442, 1990. [8] M. M. Zavlanos and G. J. Pappas, “Potential fields for maintaining connectivity of mobile networks, ” IEEE Tr ansactions on Robotics , vol. 23, no. 4, pp. 812–816, Aug 2007. [9] M. Ji and M. Egerstedt, “Distributed coordination control of multia- gent systems while preserving connectedness, ” IEEE T ransactions on Robotics , vol. 23, no. 4, pp. 693–703, Aug 2007. [10] D. V . Dimarogonas and K. J. K yriakopoulos, “Connectedness preserving distributed swarm aggre gation for multiple kinematic robots, ” IEEE T ransactions on Robotics , vol. 24, no. 5, pp. 1213–1223, Oct 2008. [11] M. M. Zavlanos, H. G. T anner, A. Jadbabaie, and G. J. Pappas, “Hybrid control for connectivity preserving flocking, ” IEEE T ransactions on Automatic Contr ol , vol. 54, no. 12, pp. 2869–2875, Dec 2009. [12] H. G. T anner , A. Jadbabaie, and G. J. Pappas, “Flocking in fixed and switching networks, ” IEEE Tr ansactions on Automatic Contr ol , vol. 52, no. 5, pp. 863–868, May 2007. [13] R. K. W illiams and G. S. Sukhatme, “Constrained Interaction and Coordination in Proximity-Limited Multi-Agent Systems, ” IEEE T rans- actions on Robotics , vol. 29, pp. 930–944, 2013. [14] R. K. Williams, A. Gasparri, G. S. Sukhatme, and G. Ulivi, “Global connectivity control for spatially interacting multi-robot systems with unicycle kinematics, ” in 2015 IEEE International Conference on Robot- ics and Automation (ICRA) , May 2015, pp. 1255–1261. [15] A. Gasparri, L. Sabattini, and G. Ulivi, “Bounded control law for global connectivity maintenance in cooperati ve multirobot systems, ” IEEE T ransactions on Robotics , vol. 33, no. 3, pp. 700–717, June 2017. [16] P . Dabov e, V . D. Pietra, M. Piras, A. A. Jabbar , and S. A. Kazim, “Indoor positioning using ultra-wide band (uwb) technologies: Positioning accuracies and sensors’ performances, ” in 2018 IEEE/ION P osition, Location and Navigation Symposium (PLANS) , April 2018, pp. 175– 184.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment