제한 시야를 고려한 다중 로봇 안정 협동 제어와 휴대형 테스트베드 실증
본 논문은 시야가 제한된 다중 로봇 시스템에서 안정적인 협동 움직임을 보장하는 제어 프레임워크를 제시하고, 이를 DJI Matrice 100 UAV와 초광대역(UWB) 기반 위치 측정 시스템을 이용한 휴대형 실험 환경에서 실증한다. 가상 점을 도입해 제한된 시야를 수학적으로 모델링하고, 포텐셜 기반 분산 토폴로지 제어를 설계하여 방향성 그래프의 연결성을 유지함을 이론적으로 증명한다. 실내·실외 실험 결과, 바람 10 mph 수준의 외란에도 목표…
저자: Pratik Mukherjee, Matteo Santilli, Andrea Gasparri
본 논문은 제한된 시야(FOV)를 가진 다중 로봇 시스템에서 안정적인 협동 움직임과 분산 토폴로지 제어를 달성하기 위한 이론적 프레임워크와 실험적 검증을 제시한다. 서론에서는 제한된 시야가 로봇 간 비대칭 상호작용을 초래하고, 기존의 대칭 기반 제어 방법으로는 이러한 상황을 충분히 다루기 어렵다는 점을 지적한다. 관련 연구로는 비대칭 그래프 제어, 시야 기반 다중 로봇 협업, 비전 기반 형성 제어 등이 소개되며, 본 연구는 이들을 통합한 새로운 접근법을 제안한다.
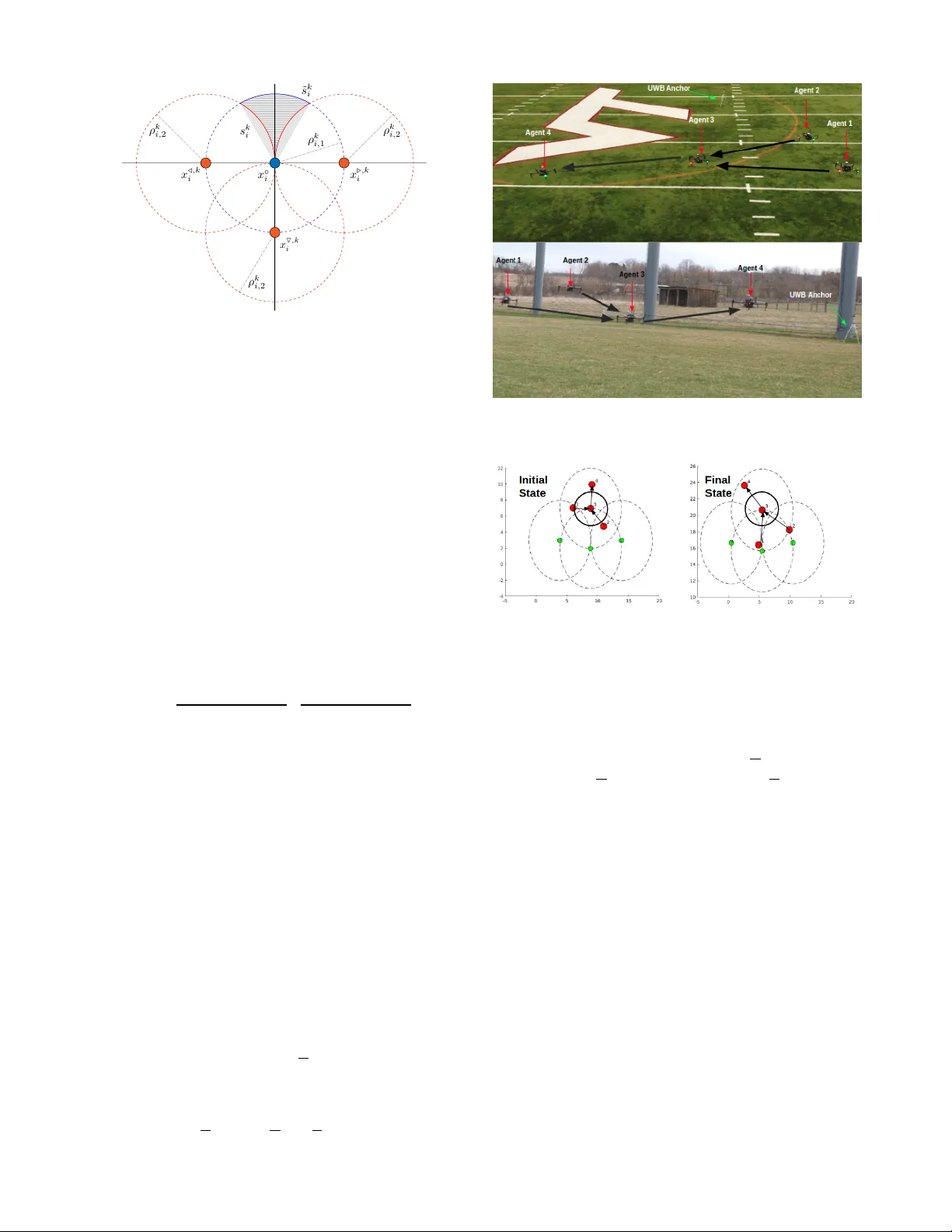
이론적 배경에서는 먼저 로봇 i의 시야를 나타내는 원형 혹은 구형 섹터 sᵢᵏ를 근사하는 집합 ˜sᵢᵏ를 정의한다. 각 섹터는 두 개의 반경 ρᵢ,₁, ρᵢ,₂와 방향 θᵢᵏ에 의해 결정되며, 로봇 j가 ˜sᵢᵏ 안에 있으면 (i, j)라는 방향성 에지가 G_FOV에 추가된다. 시야를 정확히 모델링하기 위해 로봇에 3가지 가상 점(x⁄, xᴼ, x·)을 도입하고, 이들 가상 점은 로봇의 실제 위치와 동일한 동역학을 갖도록 설계한다. 가상 점의 위치는 회전 행렬 Rτ,ᵏ와 변위 벡터 tτ,ᵏ에 의해 로봇의 자세와 시야 방향에 따라 변환된다.
제어 설계는 포텐셜 기반 접근을 채택한다. 실제 위치와 가상 점 사이에 각각 포텐셜 V∘ᵢⱼ와 Vτ,ᵏⱼᵢ를 정의하고, 이 포텐셜은 로봇 간 거리가 시야 경계에 가까워질수록 무한대로 발산하도록 설계한다. 로봇 i의 가속도는 모든 이웃 j∈N⁺ᵢ에 대한 포텐셜 그래디언트의 합으로 표현되며, 이는 식 (2)로 요약된다. 이때 가상 점의 동역학은 실제 로봇과 동일하게 설정되어, 가상 점이 로봇의 움직임을 그대로 반영한다.
안정성 분석은 기존 연구
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기