GNU-Octave Como Alternativa de Simulacion de Sistemas Dinamicos No Lineales en la Ense~nanza de la Ingenieria
This paper presents a proposed alternative to simulate non-linear dynamical systems. This has an application in bachelor programs like: Electrical and mechanical engineering, Networks and Telecommunications engineering, Mechanical engineering and mor…
Authors: Felipe de Jesus Torres, Monserrat Sugey Arredondo, Jose Manuel Martinez
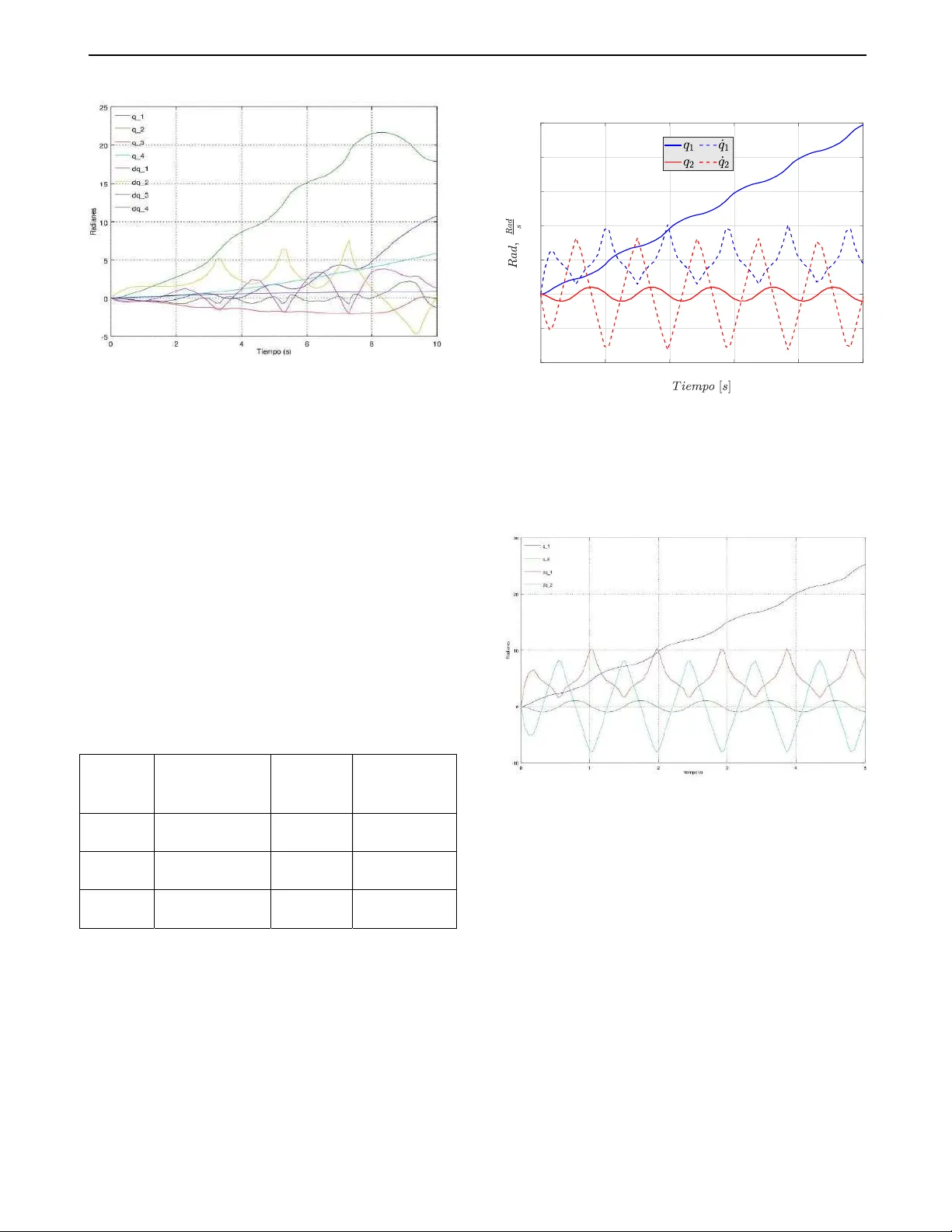
863 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ©COCYTIEG www.fesgro.mx GNU-Octave Como Alternativa de Simulación de Sistemas Dinámicos No Lineales en la Enseñanza de la Ingeniería. TORRES Felipe d e Jesús† *, ARRE DONDO Monserrat Sugey, M ARTINEZ J osé Manuel, OCAM PO Víctor Manuel. Universidad de Gua najuato, División de In genierías Camp us Irapu ato-Sala manca. Recibido : septie mbre, 22, 2018; Aceptad o Febre ro 9, 2019 . ______ _________ ___________ __________ _________ ____________ ____________ ______ ____________ ___________ _ Resumen Este artículo presenta una propuesta de al ternativa para simular siste mas dinámicos no lineales, en la enseñanza de la in geniería. Teniendo aplicación en programas de l icenciatura como: Ingeniería Electromecánica, Ing eniería en Redes y Telecomunicaciones, Ingeniería Mecánica, entre otras que se i mparten en l as disti ntas universidades públicas del e stado de Guerrero. Los equipos de cómputo, comúnmente utilizados para las simulaciones, requieren de gran capacidad de hardware pa ra soportar el software de simulación. Aunado a esto, e l software de sim ulación en la mayoría de l os casos, son bajo licencia. Por tanto, el costo de implem entar un laboratorio de simulación en una universidad pública es muy alt o. Así, se muestra una al ternativa de u sar una tarjeta de desarrollo com ercial Raspberry Pi , con el software GNU-Octave de licencia libre, para simular sistemas dinámicos no lineales como un robot SCARA de 4 grados de libertad y un péndulo invertido rotacional. La comparación d e los modelos dinámicos simulados tanto en software especializado como en el s oftware libre p ropuesto, exhiben l a viabilidad de la alternativa propuesta. Palabras clave: si mulación, sistemas dinámicos, no lineal, Raspberry Pi, GNU-Octave. Abstract This paper presents a proposed alternative t o simulate non- linear dynam ical systems. This has an application in bac helor program s like: Electrical and mechanical engineering, Networks and Telecommunications eng ineering, Mechanical engineering and more, than they are taught in several public un iversities in Guerrero state. Commonly, th e computer devices us ed for simulations require of high hardware capacity to support the simulation so ftware. Moreover, the simulation software in the majority of the cases is under licence permission. For these reasons, implementing a si mulation lab in a public university is v ery high cost. Thus, we show an alternative by using a commercial development board Raspberry Pi support ing the GNU-Octave s oftware, which is a free soft ware, to si mulate non-linear dynamical systems like a 4 grades of freedom SCARA robot and a rotational inverted pendulum . The comparision of the simulated dynamical models in both th e specialized software a nd t he pr oposed free software, exhibit the viability of the proposed alternative. Keywords: simulation, d ynamical systems, non- linear, Raspberry Pi, GNU-Octave. ______ _________ ___________ __________ _________ ____________ ____________ ______ ____________ ___________ _ Citació n: T ORRES Felipe d e Je sús†*, A RREDONDO M o nserrat Suge y, M ARTI NEZ J osé Ma nuel, OCAMPO V íctor Manuel. Alter nativa d e Si mulac ión de Siste mas Di námico s N o Li neales en la En señanza de la Inge niería. Foro de Estudios sobre G uerrero 20 18, Mayo 2019 - Abril 2020 Vol.5 No .6 863-871. ______ _________ ___________ __________ _________ ____________ ____________ ______ ____________ ___________ _ *Correspo ndencia al Autor (fd j.to rres@ugto.mx) † In v e st i g a d o r c on t r i b uy e nd o c o m o p ri me r a u t o r . 864 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. I. Introducción Las estr ategias de enseñanz a-aprendizaje en la educación superior actual, están relacionadas cada vez más con el uso de la s Tecnologías de Información y Comunicación (T IC). Particularmente, en la enseñanza de la Ingeniería es necesario u tiliz ar e quipos de cómputo para realizar simula ciones de diversa índole. Por ejemplo, en cursos como Si stemas de Control, Sistemas Dinámicos, Robótic a, Ecuaciones Diferenciales, Mate máticas Avanzadas, entre otras, se llevan a cabo simulaciones de sistemas dinámicos lineales y no lineales. En varias de las univer sidades públi cas del estado d e Guerrero se im parten licenciaturas en Ingeniería Eléctrica y Mecánica, Red es y Telecomunicaciones, Energía, Sistemas Computacionales, Civil, entre otras q ue requieren de la puest a en marcha de un laboratorio de simulación para que el estudiante pueda realizar las simulaciones de los sistemas dinámicos no lineales tratados en el aul a. Para el funciona miento adecuado del laborato rio de simulación, el e quipo de cómputo a util iza r debe c umplir, generalmente, con gran capacidad de hardware pa ra soportar los softwares de simulación especializados. Est as computadoras por tanto son de tamaño grande y costosas. Otra problemát ica que afrontan los administrativos de las escuelas públic as es la compra de licenci a de los softwares de simulación, las cua les son igualmente costosas y está n en función d e la cantidad de equipos de cómputo donde ser án i nstaladas, además de tener una vigencia finita , lo cual repre senta un gasto periódico. Existen otro tipo de softwa re denominado software libre, e l cual es un movimiento que se ha gestado desde pri ncipios de los 70’s, derivado del posici onami ento de l as grandes empresas de empezar a vende r los softwares que produc ían. Aunque fue hasta p rincipios de los 80’s cuando el movimiento de software libre inic ió a produ cir su s propios softwares, lo s cuales estaban bajo una licencia pública denominada GP L (Gene ral Pu blic L icense, por sus siglas en in glés). En Viñas (2003) expresa que é sta licencia protegía al softwa re desarrollado a partir del movimiento de software libre, otorgándole las libe rtades de: Usar el so ftware para cu alquier propósito. Estudiar cóm o funci ona el software y adaptarlo a las necesidad es propias. Distribuir libremente copias d el software. Mejorar el software y hacer públic as las versiones m ejoradas e n beneficio de la comunidad. Las ventajas de uti lizar software lib re están basadas en el costo de l a licencia qu e se elimi na completamente, respect o a un software de simulación especializado. Más aún, si ést e software libre es instalado en una minicomputadora o bie n, una tarjeta de desarrollo comercial co mo la Raspberry P i, la cual ti ene un costo 20 veces menor al costo de una computadora person al comúnmente usa da para simulación. Sin embarg o, l a problemática de utiliz ar software libre para simulación de sistemas dinámicos no lin eales se centra en que la información di sponible e n la li teratura para el proceso de enseña nza-aprendizaje, est á en función d el uso de softw are especializ ado como Matlab TM . Así por ejemplo en (Houpis, 2013) se presenta un a guía de s imulación de sistema s dinámicos lineales con Matlab TM . En (Khatib, 2016) se modelan s istemas fotovoltaicos usando Matlab TM . En (Blaabjer g, 2017) se simulan sistemas de energías renovables a través de Matlab TM . En (López, 2014) trata acerca de aplicaciones de la ingeni ería en sistemas de control con Matlab TM . Por todo lo anterior, es posible mostrar que un software libre, soporta do e n una tarjeta de desarrollo como la R aspberr y Pi, pue de ser usado como software de sim ulación de sistemas dinámicos no lineales. 865 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. El artículo se e structura de la siguiente man era: en la sección II se presenta la descripción del software GNU-Octave y de la Raspberry Pi. En la sección III se m uestran los modelos dinámicos no lin eales d el robot SCA RA y del péndulo invertido rotacional. En la sección I V, se exhiben los resultados de las simulaciones realizadas en el softwar e comúnmente usado, Matlab TM y el soft ware libre propuest o. Po r último, en la sección V se da n las conc lusiones del documento. Objetivos Simular sis temas dinámicos no lineales en software libre sop ortado en una minicomputadora o tarjeta de desarrollo como Raspberry Pi. Evidenciar como alterna tiva de simulación en la enseñanz a de la Ingeniería, el uso de GNU-Octave a través de la comparación con las simulaciones hechas en Matlab TM . II. Descripción d e GNU-Octave y Raspberry Pi. a. GNU-Octave. GNU-Octave es un softwar e libr e redistribuible, lo cual pe rmite ser modificado bajo los términos del GNU General P ublic License (GPL). Es un le nguaje de alto nivel para cálculo numérico. Permite la solución numérica de problemas lineales y no lin eales. Provee e xtensas c apacidades gráficas para visualización y manipula ción de da tos. Se usa a través d e su lí nea d e c omandos interactivos o bien de códigos. El lenguaje Octave es bastante similar a M atlab TM de tal manera que l a mayoría de los programas son porta bles. Figura 1 . P antalla de GNU Octa ve. Fue nte: tomada de la pan talla princ ipal del software G NU-Octave . b. Raspberry Pi Raspberry P I ® (RPi) es una mini- computadora en placa, de tamaño de una tarjeta de crédito, desarro llada en Reino Unido por la fundación Raspberr y Pi con la intención de estimular la enseñanz a de las cien cias computacionales básicas en escuelas (Sarthak, 2014). La funda ción provee De bian y P ython como lenguajes de prog ramación principal, sin embargo, es posi ble in stalar sis temas ope rativos en base a L inux o incl uso Wi ndows® 10. El bajo costo y l a configuración de hardware de la placa RP i han hecho que sea m uy popular entre los programadores y realiz adores (aficionados) de pro yectos de automa tiz ación que requieren algún pro cesamiento computacional. Está integrada por un chip Broadcom BCM2835 con procesador ARM h asta 1.4 GHz de v elocidad, GPU Vi deoCore IV y hasta 1 GB de memoria RAM. Se requiere de un medio de almacenamiento, tarjetas de memoria SD o microSD, así como de u n cargador microUSB de al menos 2 000mAh. Cont iene un puerto de salida de video HDMI y otro de tipo RCA, minijack de audi o y un puerto USB 2.0 (modelos A y A+, B dis pone de dos USB y B+ y Raspberry Pi 2 d isponen de 4 USB) con el que se p odrá conecta r periféricos c omo teclado y r atón. Para conexión en red, la RPi contiene un puerto Ethernet o es posible utilizar u n adaptador inalámbrico WiFi compatible. 866 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. Figura 2. Raspbe rry Pi B+. F uente: htt ps://www.rasp berrypi.org /wp-con tent/uploads/20 13/12/mo del-b- plus.png . III. Modelos Diná micos de Sis tem as No-lineales. a. Modelo Dinámico del Ro bot SCARA El robot SC ARA (Selective Compliance Articulated Ro bot Ar m, por sus siglas en inglés) e s un b razo robótico de configuración revoluta (rotacional o d e pasador) horizontal en sus articulaciones 𝑞 , 𝑞 y 𝑞 , como se observa en la Figura 3. Fu e diseñado en Japón y desempeña tareas d e tip o “tom ar y poner”, por lo que es útil en líneas de ensamble. Figura 3. Robot manipulador SCARA. Fuente: Elabora ción prop ia. Se considera un robot m anipulador rígido completamente actuad o, de spreciando l as pérdidas por fricción, con 𝑖 = 1,2 … 𝑛 articulaciones, donde 𝑛 = 4 . Los ve ctores d e coordenadas g eneralizadas de l as articulaciones del robot son 𝑞 ∈ ℝ , bajo las siguientes características: Los eslabones 1 , 2 y 3 tienen un movimiento rotacional. Sus posiciones angulares 𝜃 , 𝜃 y 𝜃 serán la s coordenadas generalizadas 𝑞 , 𝑞 y 𝑞 , respectivamente. El desplazamiento vertical 𝑑 del ef ector final, será la coordenada generaliz ada 𝑞 . Los movimientos 𝑞 , 𝑞 y 𝑞 se desarrollan en el plano horiz ontal, por lo cual s e desprecia la energía poten cial 𝑈 ( 𝑞 ) en ellos. La articulación 3 mu eve las masas 𝑚 y 𝑚 , así mismo se suman las ine rcias 𝐼 e 𝐼 . Usando el formulism o de Eul er-Lagrange, el modelo din ámico del robot, en su representación matricial, es dado por: 𝑀 ( 𝑞 ) 𝑞 + 𝐶 ( 𝑞 , 𝑞 ) 𝑞 + 𝐵 𝑖 𝑞 + 𝑔 ( 𝑞 ) = 𝜏 ( 1 ) Donde 𝑀 ( 𝑞 ) ∈ ℝ 𝑛×𝑛 es la mat riz de inercias, 𝐶 ( 𝑞 , 𝑞 ) ∈ ℝ 𝑛×𝑛 es la matriz de C oriolis y fuerzas centrífugas, 𝐵 es una matriz diagonal de los coeficientes de f ricción v iscosa de cada articulación, 𝑔 ( 𝑞 ) ∈ ℝ 𝑛 es el v ector de fuerz as gravitacionales, 𝜏 ∈ ℝ 𝑛 es el vector de torques o pares de entrada. De manera detallada, 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑀 𝑞 𝑞 𝑞 𝑞 + 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝐶 𝑞 𝑞 𝑞 𝑞 + 𝐵 0 0 0 0 𝐵 0 0 0 0 𝐵 0 0 0 0 𝐵 𝑞 𝑞 𝑞 𝑞 + 0 0 0 𝑚 𝑔 = 𝜏 𝜏 𝜏 𝜏 ( 2 ) 867 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. donde: 𝑀 = 𝐼 + 𝐼 + 𝐼 + 𝐼 + 𝑚 𝑙𝑐 + 𝑚 𝑙 + 𝑚 ( 𝑙𝑐 + 2𝑙 𝑙𝑐 𝑐𝑜𝑠𝑞 ) + ( 𝑚 + 𝑚 )( 𝑙 + 𝑙 + 2𝑙 𝑙 𝑐𝑜𝑠𝑞 ) 𝑀 = 𝐼 + 𝐼 + 𝐼 + 𝑚 ( 𝑙𝑐 + 𝑙 𝑙𝑐 𝑐𝑜𝑠𝑞 ) + ( 𝑚 + 𝑚 )( 𝑙 + 𝑙 𝑙 𝑐𝑜𝑠𝑞 ) 𝑀 = 𝑀 = 𝑀 = 𝐼 + 𝐼 𝑀 = 𝑀 = 𝑀 = 0 𝑀 = 𝐼 + 𝐼 + 𝐼 + 𝑚 𝑙𝑐 + ( 𝑚 + 𝑚 ) 𝑙 𝑀 = 𝑚 𝐶 = −𝑚 𝑙 𝑙𝑐 𝑠𝑖𝑛𝑞 𝑞 − ( 𝑚 + 𝑚 ) 𝑙 𝑙 𝑠𝑖𝑛𝑞 𝑞 𝐶 = −𝑚 𝑙 𝑙𝑐 𝑠𝑖𝑛𝑞 ( 𝑞 + 𝑞 ) − ( 𝑚 + 𝑚 ) 𝑙 𝑙 𝑠𝑖𝑛𝑞 ( 𝑞 + 𝑞 ) 𝐶 = 𝑚 𝑙 𝑙𝑐 𝑠𝑖𝑛𝑞 𝑞 + ( 𝑚 + 𝑚 ) 𝑙 𝑙 𝑠𝑖𝑛𝑞 𝑞 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 𝐶 = 0 Este modelo obt enido fue comparado con los modelos dinámicos prese ntados en (Voglewede, 2009) y (Lewis, 2006), los cu ales son similares en función de l orden de las coordenadas generalizad as. b. Modelo Dinámico del Péndulo Invertido Rotacional. En base a (Duart, 2017), el modelo dinámico del péndulo invertido rotacional, mostrado en l a Figura 4, se obtien e m ediante las ecuaciones de Euler – Lagrange. Figura 4. Pénd ulo inve rtido rotacio nal. Fuen te: Dua rt, 2017 . Debido a que el sistema tiene dos grados de libertad éstas tienen la si guiente forma: 𝑑 𝑑𝑡 𝜕𝐿 𝜕 𝜃 − 𝜕𝐿 𝜕 𝜃 = 𝜏 ( 3 ) 𝑑 𝑑𝑡 𝜕𝐿 𝜕 𝜃 − 𝜕𝐿 𝜕 𝜃 = 0 ( 4 ) Donde 𝜏 es el pa r del motor y 𝐿 es e l lagrangiano. Este últim o, está definido como: 𝐿 = 𝐾 − 𝑈 , el cual se refi ere a la diferencia de l a energía cinétic a to tal y la energía potencial t otal del sistema. Por lo que, como primera insta ncia se requiere realiz ar el cálculo de la e nergía total tanto cinéti ca como pot encial del sistema. L a energía ciné tica consiste de la componente traslacional y rotacional d el péndulo y d e la componente rotacional d el brazo. Por otro la do, el sistema s olo almacena energía potencia l en el péndulo ya que el brazo, al tener movimient o rotacional en el pla no horizonta l, no presenta un cambio de altura en su centro de m asa. Las ecuaciones resultantes son: 868 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. 𝐾 = 𝐾 + 𝐾 = 1 2 𝐼 𝜃 + 1 2 𝐼 𝜃 + 1 2 𝑚 𝐿 𝜃 + 𝑙 𝜃 + 𝜃 sin 𝜃 + 2 𝐿 𝑙 𝑚 𝜃 𝜃 cos 𝜃 ( 5 ) 𝑈 = 𝑚 𝑔 𝑙 ( 𝑐𝑜𝑠 𝜃 − 1 ) ( 6 ) Por lo tanto, el lagrangiano e s dado por: 𝐿 = 1 2 𝐼 𝜃 + 1 2 𝐼 𝜃 + 1 2 𝑙 𝑚 𝜃 + 1 2 𝑙 𝑚 𝜃 + 1 2 𝑙 𝑚 𝜃 sin 𝜃 + 𝐿 𝑙 𝑚 𝜃 𝜃 cos 𝜃 + 𝑚 𝑔 𝑙 ( 1 − cos 𝜃 ) ( 7 ) De las ecuaciones ( 3 ) y ( 4 ) se obtienen las ecuaciones de movimiento: 𝐼 𝜃 + 𝐿 𝑚 𝜃 + 𝑙 𝑚 𝜃 sin 𝜃 + 2𝜃 𝜃 sin 𝜃 cos 𝜃 + 𝐿 𝑙 𝑚 𝜃 cos 𝜃 − 𝜃 sin 𝜃 = 𝜏 ( 8 ) 𝐼 𝜃 + 𝑙 𝑚 𝜃 + 𝐿 𝑙 𝑚 𝜃 cos 𝜃 − 𝑙 𝑚 𝜃 sin 𝜃 cos 𝜃 − 𝑚 𝑔 𝑙 sin 𝜃 = 0 ( 9 ) Así, (8) es la ecuación del movimiento del brazo y (9) del péndulo. IV. Comparación de Simulación en Matlab TM y GNU-Octave. De manera general, las simulaciones so n llevadas a cabo como un siste ma d e laz o abierto, donde el usua rio introduce lo s pares de entrada que desee, éstos pares actúan s obre el modelo dinámic o no line al de l robot SCARA o del Péndul o Invertido Rota cional. El soft ware de simula ción, sea Matl ab TM o GNU-Octave resuelve el sistema de ecuaciones di ferenciales a través de una doble i ntegración para obtener la posición angular de la articulación. El esquema de simulación es vis to en la Figura 5. Figura 5 . Esquem a general de sim ulación. Fue nte: Elabora ción prop ia. a. Simulación del Ro bot SCARA. Se considera u n robot manipulador d e 4 grados de libertad tipo SC ARA, utiliza ndo el modelo dinámic o (2 ). Los parám etros d el robot SCARA don dados en la Tabla 1. Parámetro Valor Parámetro Valor 𝑚 15 𝑘𝑔 𝑙 0 . 50 𝑚 𝑚 12 𝑘𝑔 𝑙 0 . 40 𝑚 𝑚 = 𝑚 3 𝑘𝑔 𝑙 0 . 25 𝑚 𝐼 0 . 02 𝑚 𝑙 0 . 20 𝑚 𝐼 0 . 08 𝑚 𝐼 0 . 05 𝑚 𝐼 0 . 02 𝑚 𝑔 9 . 81 𝑚 𝑠 𝐵 0 . 5 𝑁 ∙ 𝑠 𝑚 Tabla 1: Parám etros de l rob ot SC ARA. (Fue nte: Elabora ción prop ia). 869 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. 1. Simulación en Matlab TM Para realiza r l a sim ulación en Matlab TM se utiliz ó de la p lataforma S imulink ® , codificación de la S-Function , solu cionador ode45 p aso variable, con un tiempo de simulación de 10 segundos y condiciones inciales a cero. E l esquema en Simulin k TM , mostrado e n l a Figura 6, es sencillo en apariencia, lo imp ortante es el código de la S-Fun ction , el c ual se detalla en el anexo a . Dentro del esquema de sim ulación se ha incluido un blo que 𝑞 _𝑑𝑞 que guarda el contenido de las variables de ca da in tegración, en una estructura de arreglo con tiempo. Esta variable es us ada pa ra crear las gráficas correspondientes. Figura 6 . Esquem a general de sim ulación. Fue nte: Elabora ción prop ia. Así, en el Gráfico 1 se presenta el desplazamiento y velocidad an gular pa ra c ada articulación del robot S CARA sometido a los pares siguientes: 𝜏 = 3 2 0 30 𝑁 ∙ 𝑚 ( 10 ) Gráfico 1. Sim ulación en Matlab TM d el si stem a no lineal: robo t SCARA. Fuen te: Elab oración p ropia. 2. Simulación en GNU-Octave El procedim iento par a ll evar a cabo la simulación en GNU-Octave ha sido desarrollado de la siguiente mane ra: 1. Codificar una función que se ha denominado projectile , conteniendo: a. Los parámetros del robot. b. Los pares de entrada al siste ma. c. Las ecuaciones dif erenciales matriciales del modelo (2). d. Formar el vecto r de segundas y primeras derivadas que serán resueltas (integradas ) por el solucionador elegido. 2. Crear un código q ue ll ame a la función projectile , éste código est ablece: a. Condiciones iniciales. b. Tiempo de simulación. c. Elección del solucionador. d. Propiedades del solucionador. e. Líneas de código p ara la creación de la gráfica correspondiente. Estos c ódigos pueden ser analizados en el anexo b . Para r ealiz ar adecuadamente la comparación, en GNU-Octave se e ligió el solucionador ode45 y un tiempo de sim ulación de 10 segundos, al igual que la simulación realizada en Matlab TM . L a gráfica que GNU- Octave arroja es vista en el Gráfico 2. 870 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. Gráfico 2. Sim ulación e n GNU-Octave d el sistema no lineal: robo t SCARA. Fuen te: Elab oración p ropia. b. Simulación del Péndulo Invertido Rotacional. Utiliza ndo el m ismo procedim iento que se e mpleó en la simulación del robot SCARA, para la simulación del Péndulo I nvertido Rotacional se utili zó el s olucionador ode45, así como un tiempo de simulación de 5 segundos y condiciones in ciales pue stas a cero. Tanto pa ra las simulaciones en Matlab TM como en GNU- Octave. Los parámetros del p éndulo invertido rotacional utiliza dos en el modelo de las ecuaciones dif erenciales (8) y (9), son dados en la Tabla 2. Pará- metro Valor Pará- metro Valor 𝑚 0 . 2866 𝑘𝑔 𝐿 0 . 201 𝑚 𝐿 0 . 30997 𝑚 𝑙 0 . 15498 𝑚 𝐼 0 . 0052 𝐼 0 . 0023 Tabla 2: Parámetros del péndulo invertido rota cional. (Fuente: E labo ración prop ia). Los re sultados de cada una de las simulaciones se visualizan a través de los Gráficos 3 y 4. Gráfico 3. Sim ulación en Matlab TM d el si stem a no lineal: pé ndulo invertid o rotac ional. Fuente: Elabora ción prop ia. Gráfico 4. Sim ulación e n GNU-Octave d el sistema no lineal: pé ndulo invertid o rotac ional. Fuente: Elabora ción prop ia. V. Conclusiones. En este artículo se ha mostrado una alternativa para la en señanza de la ing eniería cuando e s necesario r ealizar si mulaciones de los sistem as dinámicos no lineales para comprender el movimiento generado por la solución de sus ecuaciones diferenciales. 0 1 2 3 4 5 -10 -5 0 5 10 15 20 25 871 Artículo Foro d e Estudios sobre Guerrero Modernización Tecnología y Desarrollo Region al Mayo 2019- Abril 2020 Vol.5 No.6 863 - 871 ISSN: 2007-882X COCYTIEG ® Todos los derechos reservado TORRES Felipe de Jesús†*, ARREDONDO Monserrat Sugey, MARTINEZ José Manuel, OCAMPO Vícto r Manuel. Alternativa de Simulación d e S istemas Diná micos No Lineales en la Enseñanza de la Ingeniería. Fo ro de Estudios sobre Guerr ero 2018, Mayo 2019- Abril 2020 Vol.5 No.6 863-871. Sin embargo, p ara lograr un resultado eficiente, las simulaciones comúnmente se llevan a cabo en software esp ecializad o como Matlab TM que requiere de una lic encia para su legal uso. La licencia por sí sola es un costo adicional para l a institución educativa. Más aún, é ste tipo de software necesita ser sop ortado en un e quipo de cómputo con capacidades de ha rdware superiores a las computadoras de uso normal. La alternativ a mostrada consiste en u sar GNU-Octave, el cual es un software libre que no requiere p aga r el costo de un a li cencia p ara su legal funcionamiento. Además, se ha demostr ado que es posib le utiliz ar una m inicomputadora o ta rjeta de desarrollo comercial, Raspberr y Pi, como el dispositivo de cómputo sobre el cual está soportado el soft ware GNU-Octave. Las comparaciones d e las gráficas p resentadas manifiestan, que la alternativa propue sta es viable para e ficientar los recursos de la enseñanza de la ingeniería. Referencias Blaabjerg, F., & Ionel, D. M . (2017). R enewable Energ y Devices and Systems w ith Si mulations in MAT LAB® and A NSYS®. CRC Press. Duart, J. L., Montero, B., Ospina, P. A., & G onzález, E. (2017, J anuary). Dynamic M odeling and Simulation of a Ro tational Inve rted Pendulum. In J ournal of Ph ysics: C onference S eries (Vol. 792, No. 1, p. 0 12081). IOP Publishing. Houpis, C. H., & Sheldon, S. N. (2013). Line ar C ontrol System Anal ysis and Design with M ATLAB®. CRC Press. Jain, S., Vaibhav, A., & Goyal, L. (2014, Fe bruary). Raspberr y Pi based interactive h ome automation s ystem through E-m ail. In Optimization, Re liabilty, a nd Inform ation Technolog y (ICROIT), 2014 International Conference on (pp. 277-280). IEEE . Khatib, T., & El menreich, W. (2016). Modelin g o f Photovoltaic Sy stems Using MATLAB: Simp lified Green Codes. John Wile y & Sons. Lewis, F., Dawson, D. y Abdallah, C. (2006). R obot Manipulator Control, Theory and P ractice. Se gunda edici ón. New York, U SA; Marcel Dekker Ink. López, C. (2014). MATLAB control s ystems e ngineering. Apress. Viñas, R. B., & Llinàs, F. A. (2003). Siste ma o perativo GNU/Linux básico. UOC. Voglewede, P. , Sm ith, A. H., & Monti, A. ( 2009). D ynamic performance o f a scar a r obot manipulator w ith uncertaint y using p ol ynomial chaos theory. IEEE T ransactions on Robotics , 25(1), 206-210.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment