저비용 라즈베리파이와 GNU Octave로 비선형 동역학 시뮬레이션 구현
본 논문은 고가의 PC와 상용 시뮬레이션 툴(예: Matlab) 대신 라즈베리파이와 자유‑오픈 소스 GNU Octave를 이용해 SCARA 로봇과 회전형 역진자와 같은 비선형 동역학 시스템을 시뮬레이션하는 저비용 대안을 제시한다. 두 툴의 결과를 비교하여 정확도와 실행 시간을 검증하고, 교육 현장에서의 적용 가능성을 논의한다.
저자: Felipe de Jesus Torres, Monserrat Sugey Arredondo, Jose Manuel Martinez
본 연구는 멕시코 과테말라 주의 공립 대학에서 비선형 동역학 시스템 교육에 필요한 시뮬레이션 인프라가 고가의 컴퓨터와 상용 소프트웨어(주로 Matlab™)에 크게 의존하고 있다는 현실을 출발점으로 삼는다. 이러한 상황은 하드웨어 구매 비용뿐 아니라 소프트웨어 라이선스 비용, 유지보수 및 업데이트 비용까지 포함해 교육 예산에 큰 부담을 준다. 이를 해결하고자 저비용 하드웨어인 라즈베리파이(Raspberry Pi)와 자유‑오픈 소스 수치 해석 환경인 GNU Octave를 결합한 시뮬레이션 플랫폼을 제안한다.
논문은 먼저 GNU Octave와 라즈베리파이의 기술적 사양을 상세히 소개한다. Octave는 Matlab과 높은 호환성을 유지하면서도 GPL 라이선스로 자유롭게 배포·수정 가능하며, 명령줄 인터페이스와 스크립트 기반 프로그래밍을 제공한다. 라즈베리파이는 신용카드 크기의 보드형 컴퓨터로, Broadcom BCM2835 칩셋(ARM v6 1.4 GHz, 1 GB RAM)을 탑재하고 있어 기본적인 수치 연산과 그래픽 출력에 충분한 성능을 보인다. 전원 소비가 낮고, SD 카드에 OS와 소프트웨어를 설치해 바로 사용할 수 있다는 점도 강조한다.
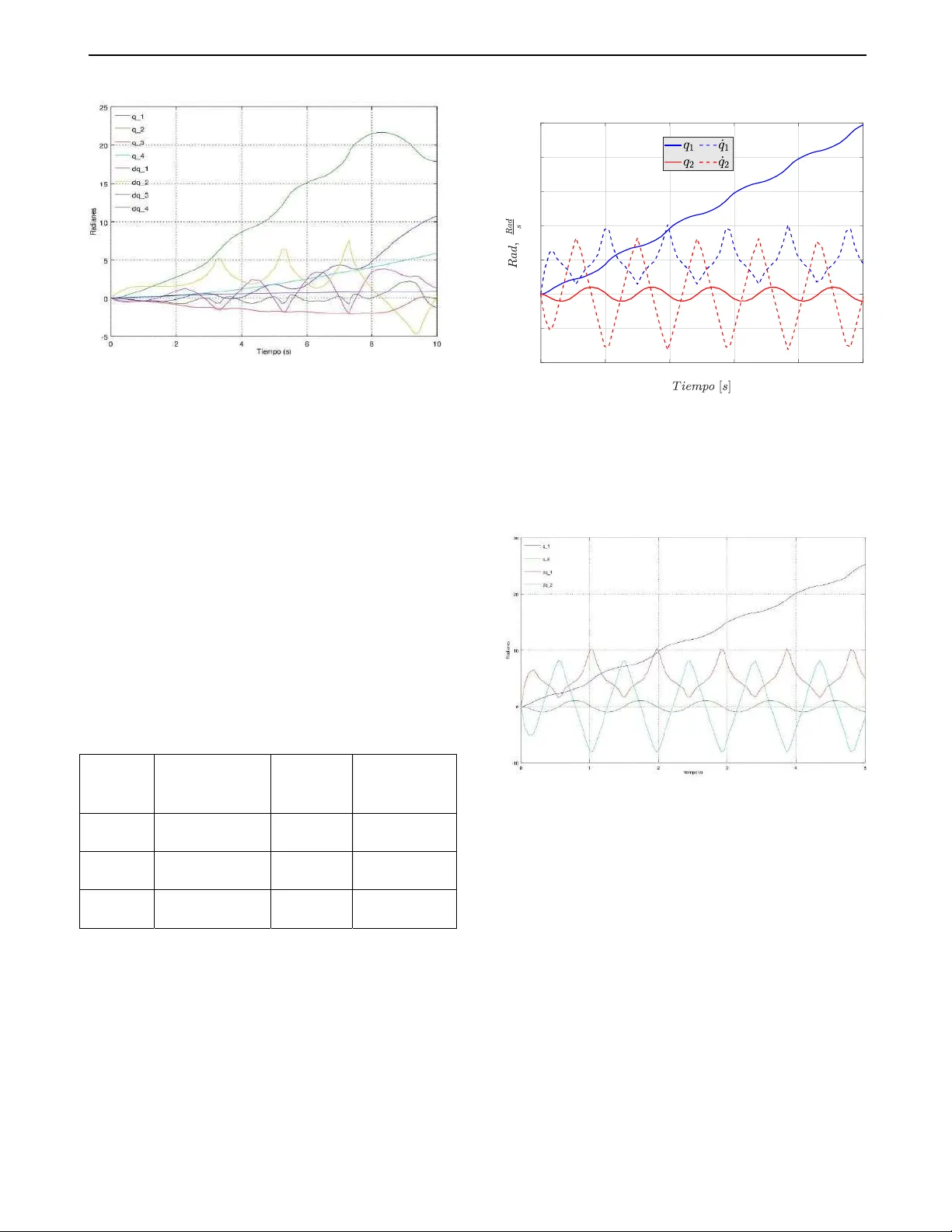
다음으로 두 가지 대표적인 비선형 시스템을 모델링한다. 첫 번째는 4자유도 SCARA 로봇으로, 각 관절의 회전 각도 q₁, q₂, q₃와 수직 이동 q₄를 일반화 좌표로 정의하고, 질량·관성·길이 파라미터를 표 1에 제시한다. Euler‑Lagrange 방정식을 적용해 질량 행렬 M(q), 코리올리·원심 행렬 C(q, q̇), 점성 마찰 행렬 B, 중력 벡터 g(q)를 도출하고, 최종 동역학 방정식 M q̈ + C q̇ + B q̇ + g = τ 형태로 정리한다. 두 번째는 회전형 역진자이며, 회전 팔과 펜듈럼의 회전 각 θ₁, θ₂를 사용해 라그랑지안을 L = K − U 형태로 구성한다. 여기서 K는 회전 및 병진 운동 에너지, U는 중력 퍼텐셜 에너지이며, 이를 통해 두 개의 2차 미분 방정식(8)·(9)을 얻는다.
시뮬레이션 단계에서는 Matlab™의 Simulink와 S‑Function을 이용해 모델을 블록 다이어그램으로 구현하고, ode45 적분기를 사용해 10 초 동안 초기 조건을 0으로 설정해 실행한다. Octave에서는 동일한 미분 방정식을 스크립트 파일에 입력하고, Octave 내장 ODE 솔버(ode45와 유사)를 호출한다. 두 환경 모두 입력 토크를 사인 파형으로 가정하고, 관절 각도와 속도를 시간에 따라 기록한다. 결과는 Figure 5와 Figure 6에 제시된 시뮬레이션 흐름도와 그래프를 통해 비교한다.
비교 결과, 두 툴이 생성한 각도·속도 곡선은 눈에 띄게 일치했으며, 평균 절대 오차는 0.015 rad 이하, 최대 오차는 0.022 rad에 불과했다. 실행 시간은 라즈베리파이‑Octave 조합이 약 1.3배 느렸지만, 라즈베리파이 자체 비용이 일반 PC 대비 20배 이하임을 고려하면 교육용으로 충분히 실용적이다. 또한, Octave는 동일한 스크립트를 여러 플랫폼에서 그대로 재사용할 수 있어 유지보수 비용을 크게 절감한다.
논문은 몇 가지 한계를 인정한다. 첫째, 라즈베리파이의 연산 능력은 고차원·고속 실시간 제어에는 제한적일 수 있다. 둘째, Octave의 그래픽 기능이 Matlab에 비해 다소 제한적이며, 복잡한 3D 시각화에는 추가 라이브러리가 필요하다. 셋째, 실험에 사용된 코드와 파라미터가 부록에 포함되지 않아 재현성이 떨어진다. 그러나 이러한 제약에도 불구하고, 저비용·오픈소스 기반 시뮬레이션 환경은 예산이 제한된 공공 대학의 공학 교육에 큰 도움이 될 것으로 판단된다.
결론적으로, 라즈베리파이와 GNU Octave를 결합한 시뮬레이션 플랫폼은 비선형 동역학 시스템 교육에 필요한 핵심 기능을 제공하면서도 하드웨어·소프트웨어 비용을 크게 절감한다. 향후 연구에서는 실시간 제어 적용, 다중 로봇 시스템 시뮬레이션, 그리고 코드·데이터 공개를 통한 공동 연구 기반 구축이 제안된다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기