Channel Dependent Mutual Information in Index Modulations
Mutual Information is the metric that is used to perform link adaptation, which allows to achieve rates near capacity. The computation of adaptive transmission modes is achieved by employing the mapping between the Signal to Noise Ratio and the Mutua…
Authors: Pol Henarejos, Ana Perez-Neira, Anxo Tato
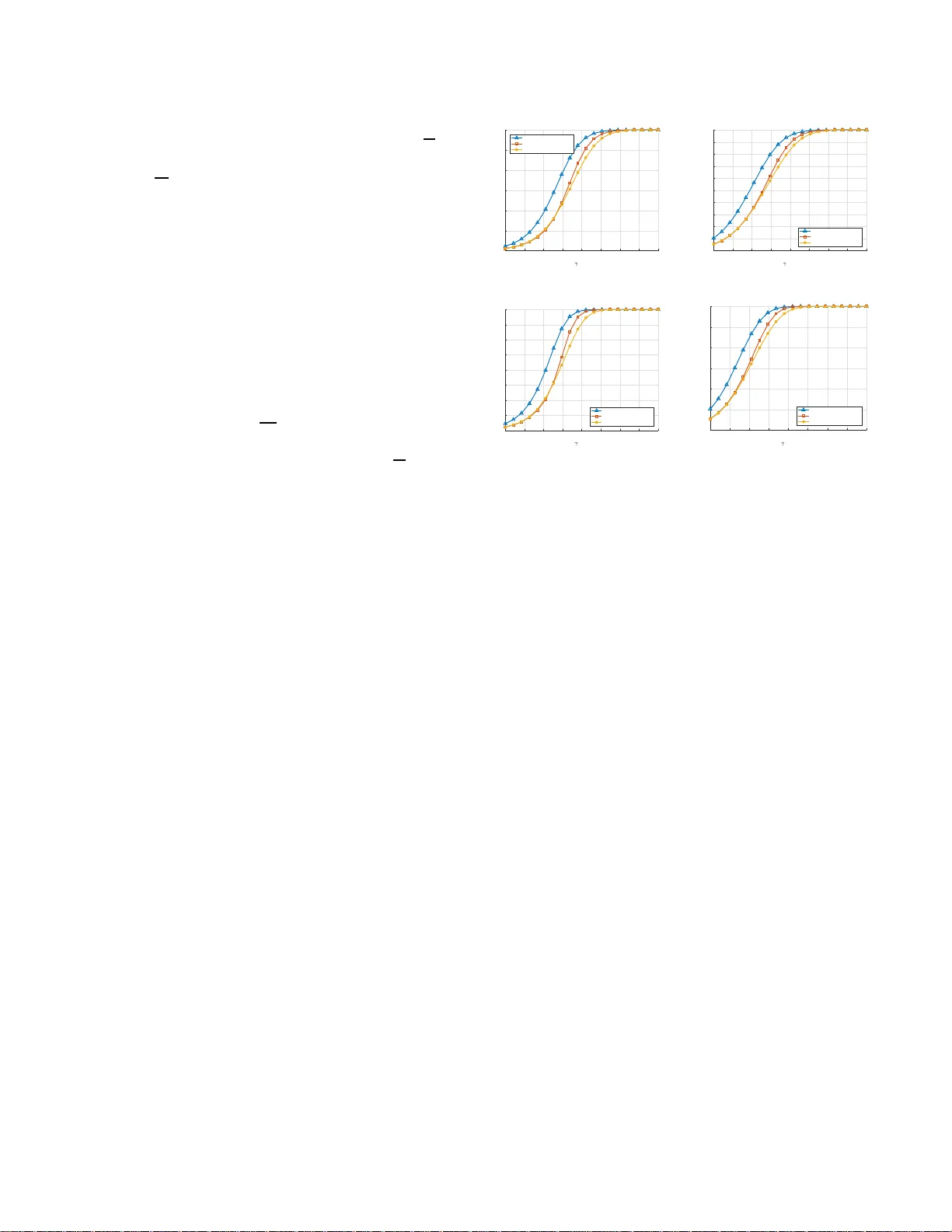
CHANNEL DEPENDENT MUTU AL INFORMA TION IN INDEX MODULA TIONS P ol Henar ejos ⋆ , Ana P ´ er ez-Neira ⋆ , Anxo T ato † , Carlos Mosquera † ⋆ Centre T ecnol ` ogic de T elecom unicacions de Catalunya (CTTC), Castelldefels, Spain † atlanTT ic Research Center , Univ ersity of V igo, Spain Email: { pol.henarejos,ana.perez } @cttc.es ⋆ , { anxotato,m osquera } @gts.uvi g o.es † ABSTRA CT Mutual Information is the m etric that is used to perfo rm link adaptation , which allows to ach iev e rates near c a pacity . The computatio n of adaptive tran smission mod es is achieved by employing th e mapping between th e Signal to No ise Ratio and th e Mutual I nform a tion. Due to the high c omplexity of the compu tation o f the Mutual Info rmation, this pr o cess is perfor med off-line v ia Monte Carlo simulations, who se r e- sults are store d in look -up tables. Ho wev er , in Ind ex Modu - lations, such as Spatial Modulation or Polarized Mod ulation, this is not f easible since the constellation an d the Mutual In - formation are channel depend ent and it would require to com- pute this metric at each time instant if the ch annel is time varying. In this pa p er , we pro p ose different app r oximation s in ord er to obtain a simple closed- form expression that allows to c o mpute the Mutual Inf o rmation at each time instant and thus, making feasib le the link ad aptation. Index T erms — Mutual I nform ation, Spatial Modu lation, Polarized Modu lation, In dex Modu lations, Link Adaptatio n 1. INTR ODUCTION Link Adap tation in modern commun ications is perfo rmed by comp u ting th e Effecti ve Sig n al to No ise (SNR) Mapping (ESM) based o n Mutual Inf ormation (MI-ESM) [1]–[3]. For instance, the work described in [4] describes the pro c edure of computing M I-ESM in Single-Input Single-Output sys- tems for IEEE 802.16e standard . Analogou sly , authors o f [5] describe the MI-E SM algo rithm fo r L ong T erm Evolution (L TE) networks. All of these works ha ve in common the co m- putation of the Mu tual Infor mation (MI) , wh ich in volves an expectation o f a func tion of a Rando m V ariable ( R V) withou t closed-for m solution. In the literature, th e co mputation o f th e expectatio n of MI is p erform ed off-line v ia Monte Carlo simulatio ns and the re - sults are stored in to a look-u p table (LUT). After this step, the received SNR o f ea ch sym bol within a cod e b lock or frame is mapped to th e LUT to obtain the MI correspon ding to the SNR. This work is funded by projects MYRAD A (TEC2016-75103-C2-2-R), ELISA (TEC2014-5925 5-C3-1-R) and TERESA (TEC2017-9009 3-C3-1-R). In I ndex M odulation s (IM ), such as Sp atial Mod ulation [6] o r Polarized Modulatio n [7], the inform ation is transmit- ted not only with a fixed constellation , such as Qu adratur e Amplitude Modu lation (QAM), but also with the channel hops. Due to the d ependen ce o n the chan nel, th e MI com- putation cann o t b e perfor med off-line sin ce the expr essions contain th e ch annel rea lization [8]. The solution is to compute the MI cur ve in each time in stant, dep ending o n the channe l realization. Du e to the h igh computatio n al comp lexity of MI computatio n, this ap proach is no t feasible. This paper presen ts closed- f orm expr essions ba sed on d if- ferent order app roximatio ns o f th e MI of IM . Based on the works [9]–[11], which c o mpute the capacity of I M, we aim at solving the difficulty of finding a closed-for m expression of MI. Thanks to th is expression, we are a b le to co m pute the MI at each time instan t with mu c h less comp utational co mplexity and ma king the p roblem of adaptive IM affordab le. Hence, the M I estimated is u sed to select the Modu la tio n and Coding Scheme in the link ad aptation alg orithm pro cess. 2. SYSTEM MODEL AND MUTU AL INFORMA TION Giv en a discrete time instant, the IM over an arb itrary Multiple-In put Multiple-Output (MI MO) chan nel realizatio n , with t in puts and r outpu ts, is defined as y = √ γ H x + w , (1) where y ∈ C r is the received vector, γ is the average SNR, x = l s , l is the all-zero vecto r excep t at po sition l that is 1, H = [ h 1 . . . h t ] ∈ C r × t is the channe l ma trix, l ∈ [1 , t ] is the hopp ing ind ex, s ∈ C is the complex symb ol from the constellation S . T h e A WGN noise is modeled as vector w ∈ C r ∼ C N ( 0 , I r ) . In other words, x has only o ne com p onent different fr om zero ( l th compo nent) an d its value is s ; that is, the transmitted sym b ol hop s amo ng the different chann els. Differently from previous works, in this pap er we do n ot analyze the statistics of H , as we are only interested in the MI giv en a chan nel realization. H models the effects and specific impairmen ts of the employed do main (spatial, po la r ization, frequen cy , etc.). h ( s, l | y ) = − X s ∈S t X l =1 Z Y f S , L , Y ( s, l, y ) log 2 f S , L | Y ( s, l, y ) d y = X s ∈S t X l =1 Z Y f S , L , Y ( s, l, y ) log 2 f Y ( y ) f S , L , Y ( s, l, y ) d y = X s ∈S t X l =1 Z Y f Y | S , L ( y , s, l ) p S ( s ) p L ( l ) × log 2 P s ′ ∈S P t l ′ =1 f Y | S , L ( y , s ′ , l ′ ) p S ( s = s ′ ) p L ( l = l ′ ) f Y | S , L ( y , s, l ) p S ( s ) p L ( l ) ! d y = 1 tS X s ∈S t X l =1 I E Y | S , L ( log 2 P s ′ ∈S P t l ′ =1 f Y | S , L ( y , s ′ , l ′ ) f Y | S , L ( y , s, l ) !) (3) Since the transmitted vector is deter mined by ( s, l ) , it is possible to r ewrite (1) as y = √ γ h l s + w . (2) Thus, th e MI be twe e n the r eceiv ed signal and ( s, l ) is ex- pressed as I ( y ; s, l ) = I ( y ; s | l ) + I ( y ; l ) = H ( s | l ) − h ( s | l , y ) + H ( l ) − h ( l | y ) = H ( s ) + H ( l ) − h ( s, l | y ) (4) where the third equality assumes that s and l are indep endent R V , H ( X ) = − P x ∈ X p X ( x ) log 2 ( p X ( x )) is the entr opy of X and h ( X ) = − R ∞ −∞ f X ( x ) log 2 ( f X ( x )) d x is the differential entropy of X . No te that, in contrast to [11], where the ca p acity is ob ta in ed, in our case the sy mbol s is not maximize d a n d belongs to a particu la r constellation . The en tropy of s and l is expressed as H ( s ) = lo g 2 S and H ( l ) = lo g 2 t , where S is the number of symb o ls defined in the constellation. Th e expression of the differential en tropy h ( s, l | y ) is deno ted in (3), wh ere Y is the do m ain of y , I E X {·} is the expectation of X , f S , L , Y ( s, l, y ) is the joint pr obability density fu nction (pdf ) of s , l and y , f Y | S , L ( y , s, l ) is the con- ditional pdf of y condition ed to s an d l , f Y ( y ) is the pd f of y , p S ( s ) = 1 /S and p L ( l ) = 1 /t are th e pro babilities o f symbo l s a n d index l , respectively , R Y d y . = R Y 1 · · · R Y r d y 1 . . . d y r , and Y i is the d omain of th e i th co m ponen t of y . The pdf o f y c ondition e d to s an d l is o btained by as- suming s and l to be d eterministic in (2). In th is case, it is clear that y is a multivariate complex Ga u ssian R V , with mean eq ual to √ γ h l s and id entity covariance. T h us, the con- ditioned pdf is expressed as f Y | S , L ( y , s, l ) = 1 π r e −k y − √ γ h l s k 2 . (5) Note that we assume that s and l are eq uiprob able. By substi- tuting (5) in (3), th e expectation can be d escribed as I E Y | S , L ( log 2 P s ′ ∈S P t l ′ =1 f Y | S ′ , L ′ ( y , s ′ , l ′ ) f Y | S , L ( s, l, y ) !) = I E W ( log 2 X s ′ ∈S t X l ′ =1 e − γ h l s + w √ γ − h l ′ s ′ 2 + γ w √ γ 2 !) = I E W ′ ( log 2 X s ′ ∈S t X l ′ =1 e − γ k h l s − h l ′ s ′ + w ′ k 2 − k w ′ k 2 !) , (6) where W ′ ∼ C N 0 , 1 γ I and, thus, the condition ed R V Y | S , L ≡ W ′ . Computing (6) is achieved nu merically by generating a very large nu mber of realizations of W ′ and averaging the re- sults via Monte Carlo simulations. Howe ver , this c an only be feasible in scenario s where fixed constellations are employed. In the ca se of IM, the constellation depend s on the chan nel realization. Hence, the expectatio n has to b e calculated at each tim e in stant, requiring high compu tational complexity and making the pr oblem o f link adap ta tio n u naffordable. Our approa c h overcomes this problem , since it do es not requ ire off-line compu tations and presents clo sed-form expressions. Once f W ′ is d efined, we ap ply the same p rocedu re as d e - scribed in [11], which uses th e T aylor Series Expa n sion (TSE) to appro ximate the exp ectation of a fun ction by its mo ments. The centr al mo ments of W ′ are defined by µ W ′ i, ℜ = µ W ′ i, ℑ = 0 ϑ n W ′ i, ℜ = ϑ n W ′ i, ℑ = ( ( n − 1)! ! 1 (2 γ ) n 2 = if n is even 0 if n is od d , (7) where W ′ i, ℜ and W ′ i, ℑ are th e real and imaginar y parts of the i th com ponent of the R V W ′ . By assuming that g sl ( w ′ ) = lo g 2 X s ′ ∈S t X l ′ =1 e − γ k x sl − x s ′ l ′ + w ′ k 2 − k w ′ k 2 ! , (8) I ( y ; s, l ) = log 2 ( tS ) − 1 tS X s ∈S t X l =1 log 2 ( D sl ) − 1 tS X s ∈S t X l =1 ∞ X n =1 1 (2 γ ) n (2 n )! ! r X m =1 ∂ 2 n g sl ∂ w ′ 2 n m, ℜ ( µ W ′ ) + ∂ 2 n g sl ∂ w ′ 2 n m, ℑ ( µ W ′ ) ! (10) r X m =1 ∂ 2 g sl ∂ w ′ 2 m, ℜ ( µ W ′ ) + ∂ 2 g sl ∂ w ′ 2 m, ℑ ( µ W ′ ) ! = 4 γ P s ′ ∈S P t l ′ =1 D sl,s ′ l ′ log 2 D − 1 sl,s ′ l ′ D sl − (2 γ ) 2 log(2) r X m =1 P s ′ ∈S P t l ′ =1 ( x m,s ′ l ′ , ℜ − x m,sl, ℜ ) D sl,s ′ l ′ D sl ! 2 + P s ′ ∈S P t l ′ =1 ( x m,s ′ l ′ , ℑ − x m,sl, ℑ ) D sl,s ′ l ′ D sl ! 2 = − 4 γ log 2 G sl D D sl,s ′ l ′ sl,s ′ l ′ A sl ( D sl,s ′ l ′ ) − (2 γ ) 2 log(2) D 2 sl r X m =1 D 2 m,sl, ℜ + D 2 m,sl, ℑ , (11) I (2) ( y ; s, l ) ≃ log 2 tS G ( D sl ) + A log 2 G sl D D sl,s ′ l ′ sl,s ′ l ′ A sl ( D sl,s ′ l ′ ) + γ log(2) D 2 sl r X m =1 D 2 m,sl, ℜ + D 2 m,sl, ℑ (12) we defin e the TSE of function g sl ( w ′ ) in th e vicin ity of µ W ′ as g sl ( w ′ ) = T ( g sl , w ′ , µ W ′ ) = P N ( g sl , w ′ , µ W ′ ) + R N ( g sl , w ′ , ξ ) , wh e r e P N is th e T aylor po lynomia l of degree N and R N is the remaind e r term of d egree N . Thus, the expectation o f (6) is e q ual to I E W ′ { T ( g sl , w ′ , µ W ′ ) } = g sl ( µ W ′ ) + ∞ X n =1 1 (2 γ ) n (2 n )! ! r X m =1 ∂ 2 n g sl ∂ w ′ 2 n m, ℜ ( µ W ′ ) + ∂ 2 n g sl ∂ w ′ 2 n m, ℑ ( µ W ′ ) ! . = P N ( g sl , w ′ , µ W ′ ) + R N ( g sl , w ′ , ξ ) , (9) where ξ ∈ [ µ W ′ , w ′ ] and P N ( g sl , w ′ , µ W ′ ) = I E W ′ { P N ( g sl , w ′ , µ W ′ ) } = g sl ( µ W ′ ) + ⌊ N/ 2 ⌋ X n =1 1 (2 γ ) n (2 n )! ! r X m =1 ∂ 2 n g sl ∂ w ′ 2 n m, ℜ ( µ W ′ ) + ∂ 2 n g sl ∂ w ′ 2 n m, ℑ ( µ W ′ ) ! R N ( g sl , w ′ , ξ ) = I E W ′ { R N ( g sl , w ′ , ξ ) } . (13) Hereinafter, for the sake of clarity , we introdu ce the following definitions: x sl . = h l s D sl,s ′ l ′ . = e − γ k x sl − x s ′ l ′ k 2 D sl . = X s ′ ∈S t X l ′ =1 D sl,s ′ l ′ = X s ′ ∈S t X l ′ =1 e − γ k x sl − x s ′ l ′ k 2 . (14) The first term of (9) is d escribed as g sl ( µ W ′ ) = lo g 2 X s ′ ∈S t X l ′ =1 e −k x sl − x s ′ l ′ k 2 ! = log 2 ( D sl ) . (15) Thus, b y u sin g (9), (15) an d sub stituting them into (4), then the MI can be expr essed in a closed-fo rm as in (10) an d it can be ap p roximate d by considerin g addition al terms. The simplest expression is the first order appro ximation, which is obtained by o mitting the thir d term in ( 10). Consequen tly , the first ord er approx imation is d enoted b y I (1) ( y ; s, l ) ≃ log 2 ( tS ) − 1 tS X s ∈S t X l =1 log 2 ( D sl ) = log 2 tS G ( D sl ) , (16) where G ( D sl ) an d A ( D sl ) are th e g eometric an d arithm etic mean, respectively , i.e., G ( D sl ) = Q s ∈S Q t l =1 D sl 1 tS and A ( D sl ) = 1 tS P s ∈S P t l =1 D sl . The second order appro x imation in volves the secon d deriv ativ e o f g sl at x sl . Thus, after some ma thematical ma - nipulation s, the secon d term is expressed as (11), wh e r e D m,sl, ℜ = X s ′ ∈S t X l ′ =1 ( x m,s ′ l ′ , ℜ − x m,sl, ℜ ) D sl,s ′ l ′ D m,sl, ℑ = X s ′ ∈S t X l ′ =1 ( x m,s ′ l ′ , ℑ − x m,sl, ℑ ) D sl,s ′ l ′ (17) and A sl ( D sl,s ′ l ′ ) = 1 tS X s ′ ∈S t X l ′ =1 D sl,s ′ l ′ G sl D D sl,s ′ l ′ sl,s ′ l ′ = Y s ′ ∈S t Y l ′ =1 D D sl,s ′ l ′ sl,s ′ l ′ ! 1 tS (18) are th e ar ithmetic and geom etric means over s ′ and l ′ by keep- ing s and l fixed. Hence, by plugg in g (11) in ( 1 0), the second order approx imation of MI is described by (1 2). 2.1. Bounds of approximated Mutual Information TSE applied to the expectation of a fu n ction of a R V allows to express it as a fu nction of its momen ts instead of the R V ; thus, making mo re efficient the com putation by successiv e a pprox - imations. An impor tant remar k is th at the expectation of TSE is lower or u pper bo u nded by the first o rder appr oximation , depend ing on its conv exity or concavity , respectively . In our case, this can be proven by examining the co n vexity of (8) an d ap plying the Jensen’ s inequ ality , wh ich r esults that the expectation of TSE is lower b ound ed by (15). This can be proven by using the Jensen’ s inequality a s follows P 1 ( f , x , µ X ) = f ( µ X ) = f (I E X { x } ) ≤ I E X { f ( x ) } . (19) Note that, du e to the minus sign in (4), the lower bound of Jensen’ s inequ a lity b ecomes an upper boun d, which is in- creased by the factor log 2 ( tS ) an d averaged by t and S . 3. RESUL TS In this section, we illu strate th e results derived fro m the p re- vious section s. W e com pare the perform ance of first and sec- ond o rder ap proxim ations, i.e., (1 6) an d ( 12), r espectively , by simulating th e curves of MI with the integral- based expres- sion (3), (4). In this simulation , we g e nerate 1 0 3 indepen d ent ch annel realizations following a Ray leig h distribution and av erage th e -20 -15 -10 -5 0 5 10 15 20 [dB] 0 0.5 1 1.5 2 2.5 3 Capacity [b/s/Hz] 1st Order 2nd Order Integral-based Expression (a) 2 × 2 , S = 4 -20 -15 -10 -5 0 5 10 15 20 [dB] 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 Capacity [b/s/Hz] 1st Order 2nd Order Integral-based Expression (b) 2 × 2 , S = 16 -20 -15 -10 -5 0 5 10 15 20 [dB] 0 0.5 1 1.5 2 2.5 3 3.5 4 Capacity [b/s/Hz] 1st Order 2nd Order Integral-based Expression (c) 4 × 4 , S = 4 -20 -15 -10 -5 0 5 10 15 20 [dB] 0 1 2 3 4 5 6 Capacity [b/s/Hz] 1st Order 2nd Order Integral-based Expression (d) 4 × 4 , S = 16 Fig. 1 . Comparison of th e MI fo r different or der appr oxima- tions and the integral-based expre ssion, i.e., (16), ( 12) and (4), respectively . results to obtain a sin g le smo oth curve. Note th at we d o not average over n oise r ealizations since we obtain e d m ath- ematical expressions th at are not f unctions o f a noise R V . W e also d epict different inpu t/o utputs config u rations an d differ- ent constellation s. Particularly , we c o nsider QPSK and 16 - QAM constellation s. Fig. 1 illustrates the M I of first and second orde r ap- proxim a tions, ( 16) and (12), r e sp ectiv ely , compa r ed w ith the integral-based expression, (3), (4). First, as we deno ted in Section 2. 1, the fir st o rder app r oximation is, at the same time, the up p er boun d of the integral-ba sed expression. Addition- ally , we can observe that, a s expected , th e second order ap- proxim a tion produ c e s tighter curve com pared with th e first order app roximatio n . 4. CONCLUSIONS In this paper we in troduce the problem of implemen ting link adaptation in I ndex Mod u lations, such as Spatial Mo dula- tion or Polariz e d Modulatio n, wher e th e info rmation is mod- ulated with fixed constellation s and dynamic ch annel hops. If the channe l is time varying, it is u naffordable to com pute the Mutual Inf ormation at each time instant. W ith our ap- proach it is possible to o btain a smooth curve by usin g c lo sed- form expressions, decre a sing the co mputation al co mplexity and allowing to p erform the link ad a ptation. Finally , we de- pict th e first and second orde r appr oximation s comp ared with integral-based exp r ession f or several configura tions and co n- stellation size. 5. REFERENCES [1] T . T ao and A. Czylwik, “Perf o rmance analysis of link adaptation in L TE systems, ” in Pr oc. Int. I TG W o rk- shop Smart Antenn as , Feb. 201 1, pp . 1–5. [2] S. A. Cheema, M . Gro ssman n, M. Landman n, G. D. Galdo, and G. D. Galdo , “L ink adaptation for L TE - A systems employing MMSE turb o eq ualization, ” in Pr o c. WSA 2014; 18 th I nt. ITG W orkshop Smart An- tennas , Mar . 2 014, pp. 1–7. [3] K. Hosseini, S. Patel, A. Damn janovic, W . Chen, and J. Montojo, “Link- lev el analysis of low latency opera tio n in L TE networks, ” in Pr oc. I EEE Globa l Commun ica- tions Conf. (GLOBECOM) , Dec. 201 6, pp . 1–6. [4] R. Srinivasan, J. Zhuang, L. Jalloul, R. Novak, and J. Park, “IEEE 802 .16m Evaluation Metho dolog y Docu- ment (EMD ) , ” IE EE, T ech. Rep., 2008. [5] I. Latif, F . Kaltenberger, an d R. Kn opp, “Link ab strac- tion fo r m ulti-user MI MO in L TE using interferen ce- aware receiver , ” in W ir eless Communic ations and Net- working Conference (WCNC) , IEEE, 2012 , pp . 84 2– 846. [6] M. Di Renzo, H. Haas, A. Ghray eb, S. Su giura, an d L. Ha n zo, “Spa tial mo d ulation for gener alized MIMO: Challenges, oppo r tunities, and implem entation, ” P r oc. IEEE , vol. 102, no . 1, pp . 56 –103 , 201 4 . [7] P . He n arejos and A. I. Perez-N e ir a, “Dual polar iz e d modulatio n a n d receptio n for n ext generation mo b ile satellite com munication s, ” IEE E T rans. Commun. , vol. 63, no. 1 0, pp. 3 803–3 812, 2015 . [8] A. T ato, P . Henarejos, C. M osquera, an d A. I. Perez- Neira, “Link adaptation algorith m s fo r d ual p olariza- tion mobile satellite system s, ” in In Pr oceeding s of 9th EAI I nternationa l Conference on W ireless and Satel- lite Systems (W iSATs), 14-15 September 2017, Oxfor d, UK. , Sep. 2017. [9] Y . Y an g an d B. Jiao, “Infor mation-g u ided chann el- hoppin g for high d a ta r ate wireless commu nication, ” IEEE Commun. Lett. , vol. 12, no. 4, pp. 225–2 2 7, 2008. [10] R. Rajash e k ar , K. Hari, and L. Hanzo, “Reduced- complexity ML detectio n and capacity-optimized training fo r spatial modu lation sy stems, ” IE EE T rans. Commun. , vol. 62, no. 1, pp. 112–1 25, 201 4. [11] P . Henarejos an d A. I. Per ez-Neira, “Cap a city an alysis of in dex modu lations over spatial, polarization, a n d frequen cy dimen sions, ” I EEE T rans. Co mmun. , vol. 65, no. 1 2, pp. 5 280–5 292, Dec. 20 1 7.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment