Disruption Management with Rescheduling of Trips and Vehicle Circulations
This paper introduces a combined approach for the recovery of a timetable by rescheduling trips and vehicle circulations for a rail-based transportation system subject to disruptions. We propose a novel event-based integer programming (IP) model. Fea…
Authors: S, or P. Fekete, Alex
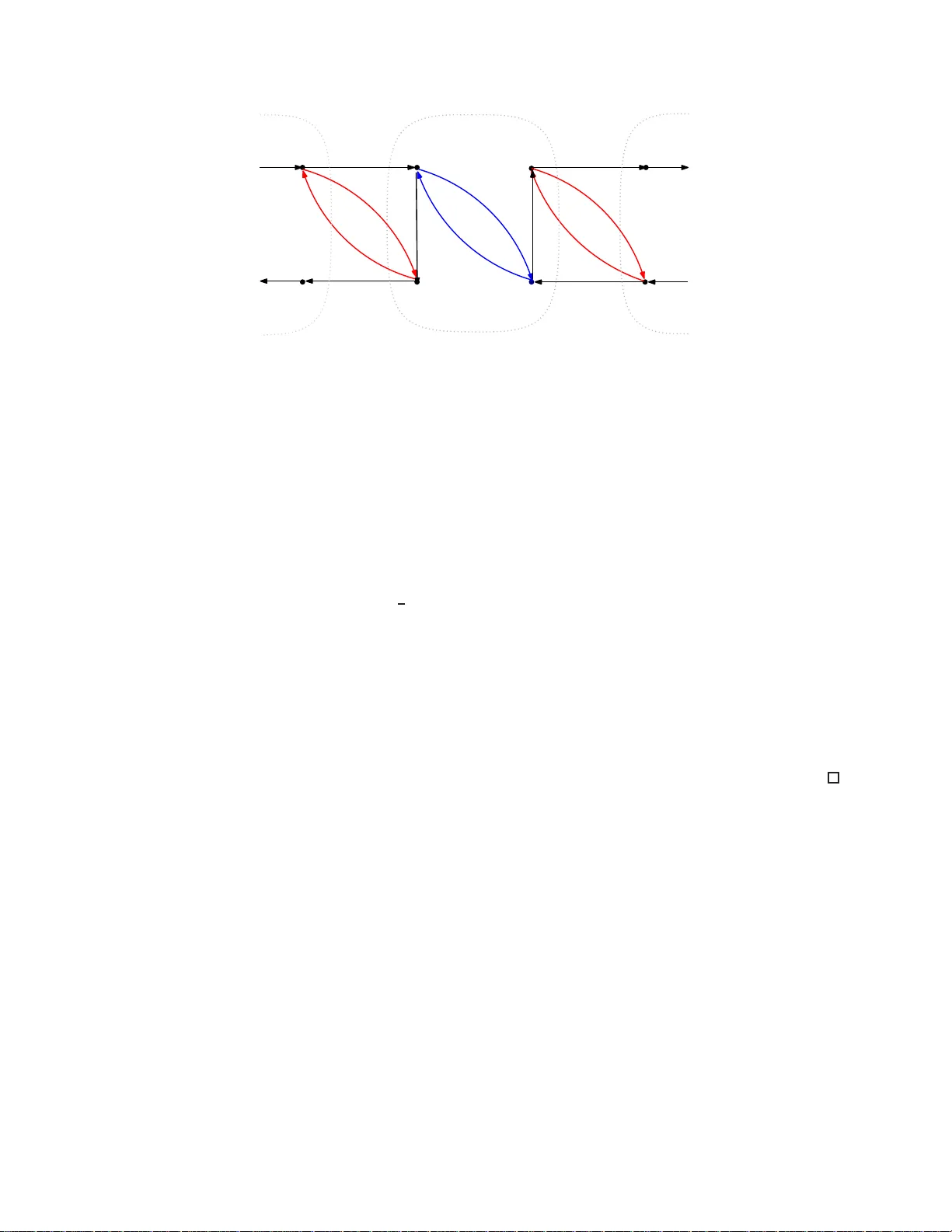
Disruption Managemen t with Reschedu ling of T rips and V ehicle Circulatio ns S ´ andor P . Fekete ∗ Alexander Kr ¨ oller ∗ Martin Lorek ∗ † Marc Pfetsch ‡ Abstract This paper introduces a combined approach for the recovery of a timetable by rescheduling trips and vehicle circulations for a rail-based transportation system subject to disruptions. W e propose a no vel e vent-ba sed integer programming (IP) model. Features include shifting and canceling of trips as well as modifying the vehicle schedu l es by changing or truncating the circulations. The objectiv e maximizes the number of reco vered t rips, possibly with delay , while guaranteeing a conflict-free new timetable for the estimated time wi ndo w of the disruption. W e demon- strate the usefulness of ou r approach through exp eriments for real-life test instances of rele vant size, arising from the subway system of V ienna. W e focus on scenarios in which one direction of one track is blocked, and trains hav e to be sched uled through this bottleneck . Solving th ese instances is made p ossible by contracting parts of the underlying e vent-acti vity graph; this allo ws a significant size reduction of the IP . Usually , the solutions found wit hin one minute are of good quality and can be used as good estimates of reco very plans in an online con text. 1 Introd uction 1.1 Disruption Management in Passenger T raffi c Mobility of peop le is of growing importance in modern societies. For instance, especially in den sely populated Euro- pean cities, public transportation systems fo rm a r elev ant economic factor . Howe ver , possible disruption of o peration s in such systems will always r emain un av oida ble. Increased pr essure towards econ omical op eration has amplified th e impact and the frequency of such disruptio ns. Being of ten optimized to the limit, transportation systems ha ve become more interconne cted, and th erefore more vulnerab le to d isruptions. This ma kes it indispensable to dev elop more ad vanced meth ods for disruption ma nagemen t o f p assenger traffic. Railw a y disruptio n manag ement is defined in Jespe rsen-Groth et al. [1] as the process of finding a ne w timetable by reroutin g, d elaying, or canceling trains and rescheduling the r esources like ro lling stock an d the cre w such that the new timetable is feasible w ith resp ect to the n ew schedules. This has to b e per formed while the e ffects of disruption s are still unfoldin g, that is, disruption manag ement is an online p roblem . The recovery of the timetable, the vehicle schedule, and th e crew schedule is usua lly perform ed sequ entially . While pr evious work has fo cused on eith er d elay manag ement (i.e., m aking sure th at the delay of passenger s and the inconvenience caused by missed train s is kept low) o r o n d eriving ne w circu lations on a given dispatc hing timetable, a pa rticular aspect that h as yet to b e con sidered from a scientific side is to co mbine resch eduling of trips and vehicle circulations to o btain a feasible d ispatching timetab le. The goal is to per form as m any trips of the origin al timetab le as possible. Clearly , this is an imp ortant n ext step when further ad vancing optim ization to wards real-time m ethods for stabilizing rail-based transpor tation s y stems. ∗ Departmen t of Computer Science, TU Braunschweig, D-38106 Braun schweig, German y , Email: { s.fek ete,m.lorek,a.kroeller , m.pfetsch } @tu- bs.de. http: //www .cs.ibr .tu-bs.de/alg † Supported by a fell owship from Siemens A G. ‡ Departmen t of Mathematics, T U Braunsc hweig, D-38106 Braunschweig, Germany , Email: m.pfetsch@tu- bs.de. 1 1.2 Related W ork The challenges and problems co nnected with passenger railw ay transporta tion h av e bee n intensively stud ied fo r th e last decades, an d operations research methods have been successfully app lied. For example, Liebchen in vestigated the op timization of perio dic timetables [2]. Howe ver, in daily operatio n, u nforeseen ev e nts occur and may lead to disruption s of the timetable. Different aspects of this problem h av e b een considered, and various app roaches and models exist. A general framework f or the prob lems and solution m ethods in disruption management can be fo und in [1]. The p roblem we inv e stigate in th is paper is clo sely re lated to the delay man agement pr ob lem . Mixed-integer approa ches for it are introd uced b y Sch ¨ obel [3, 4 ] an d extend ed by capa city co nstraints f or th e tra cks [5 ]. Scha chte- beck [6] adds circulation constraints to the model and performs a matching at the depots to prevent a large delay from spreading into the next circulation activity . The computatio nal complexity of the origin al delay management problem is investigated in [7]: it tu rns o ut to be NP-ha rd, even in special cases, see also [8]. Simulation studies can be fou nd in [9, 10, 1 1]. T ¨ ornquist [ 12] giv e s an overview over the existing mo dels and decision supp ort s y stems. He also inv es- tigates the disturbance manageme nt o n n -tracks [13]. Gatto an d W idmayer consider related proble ms as an o nline job shop mo del [14]. A de cision suppo rt system fo r rolling stock reschedu ling during d isruption, wher e the r olling stock is balanced accordin g to a giv en dispatching timetable, is provided by Nielsen [15]. In this paper, we focus on scenarios in which one direction of a track network has to be shutdown, such that trains have to be scheduled throug h a bo ttleneck. This leads to the track allocation pro blem stud ied by Bornd ¨ orfer and Schlechte [16], which is sh own to b e NP-h ard in [8]. A column gen eration appro ach to tim etabling train s though a corrido r is pr esented by Cacchiani et al. [1 7]. Huisman et al. developed column generatio n approac hes to r eschedule rail cr ew [18] and solved th e co mbined crew resch eduling p roblem with r etiming o f trip s b y a llowing small chang es to the train timeta bles [1 9]. An overview of models and m ethods fo r similar pr oblems that a rise in th e airlin e context can be found in Clausen [20]. None of the above papers considers reschedu ling of trips and circulation s as an integral part of d eriving a feasible dispatching timetab le. Clearly , we can imag ine real-life scenarios that r equire an integrated appro ach fo r disruptio n managem ent, e.g., in an on line situation with train s already circulatin g in the rail n etwork and an in feasible timetable due to heavy disruptions. 1.3 Our Contrib ution In this pap er , we in troduce a comb ined app roach f or reschedulin g trips and vehicle circulation s in or der to deal with unplann ed disruptions. W e derive a new re-optimized dispatching timetable with respect to a feasible new vehicle schedule that performs as much o f the original trips as po ssible. Especially in subway systems, the utilization of the system is high. The high frequ ency o f trains circulating in th e system, the limited possibilities for overtaking, swapping tracks, and temporar ily pa rking, as well as the b ottleneck sections caused b y disruptio ns force us to ad d stronger resource restrictions a nd integrate fu rther p ossibilities into the model in o rder to obtain a feasible dispatching timetable. Our main mathematical contributions are an approp riate model based on integer prog ramming that combin es reschedulin g of trips and cir culations, as well as a ma thematical contractio n technique for simp lifying the mo del. On the practical side, we are able to d emonstrate the usefuln ess of this mathematical optimization appr oach by providing optimal and near-optimal solutions for a system of real-lif e instances that are based on the subway system of V ienn a. The rest of this paper is organized as follows. In th e following section, we describe detailed aspects of disruptions in the operatio n of rail- based transpo rtation. Th is lead s to an optimization model based on integer linear pro grammin g. Mathematical aspects of solving re al-life in stances ar e discussed, and co mputation al results are pr esented befor e we conclud e with a discussion of futu re work. 2 Disruption in Public T ransport Disturbances in the daily op eration o f public passenger transp ort c annot b e av oid ed. Th is c an in clude delays caused by longer waiting times, because an unexpected numbe r of passengers en ter or lea ve th e train , a driver arr iving late at a relief point, or a technical pro blem w ith the mechanism of an automatic door . These disruption s lead to small delays, which usually can be absorbed b y the buffer tim es integrated into the timeta ble. If bigger disruption s o ccur, 2 e.g., a vehicle br eaks down or a par t of the track requires unplan ned work, t his ca uses a temporary shu tdown on a track section. Such disruptions lead to se vere violations of the timetable, which have to be resolved by the dispatcher s. As an illustrating example, consider a blocked trac k section on a 2 -track network . A possible option inclu des reroutin g trips, which originally use th e blocked track , via the oppo site track . This leads to a large number of co nflicts on that track section , because trains driving into opposite directions have to shar e the same track resou rces and compete for free time slots to pass trough this bo ttleneck. Con sider two trains that ar e scheduled to en ter the shared track section in o pposite dir ections at the same time . Assume th at the minim um transit time is 5 m inutes and the minim um safety time between two trains u sing th e same track in o pposite direction is on e min ute. If the cycle time is 5 minutes an d we allow a m aximum delay of 5 minutes, it is not possible to schedule both trains throug h the bottleneck. Dependin g on the length of the b ottleneck an d the frequ ency of the railway system, updatin g the tim etable by delaying trips will not suf fice. If trains queue up in front of the bottleneck, passenger travel time will in crease d ra- matically . Mor e precisely , the dispatch er has different possibilities for d ealing with this situation. The timetabling perspective inc ludes that 1. trips can be delayed within a certain time window and 2. trips can be canceled. In addition reschedu ling of the vehicle circulations allo ws that 1. trains can be instru cted to tr uncate their circulation an d tu rn early , in orde r to serve trips initially p lanned f or a different tr ain, 2. trains can be used to shuttle inside the single-tra ck sections, 3. trains can return early to a depot, and 4. replace ment v eh icles can be used. Usually , timetabling and vehicle scheduling are planne d sequ entially . Recently , resear ch has focused more and more on in tegrating dif fere nt steps of the p lanning process, as p roposed in [21]. If h eavy disruptions occur, these two aspects are strongly interweaved and n eed to be handled at the same time. In the following, we present a model b ased on integer linear program ming that find s a feasible disposition timetable and new v ehicle schedules. It respec ts the capacity constraints of the tracks and allows dropping trips and early turns. The goal is to return to the initial timetable within a certain time horizon. 3 Our Model 3.1 A Graph Repr esentation In the following we co nsider a r ail network G = ( S , J ) with S and J re presenting the set of station s and tracks and a giv en dispatching timetable π that includ es the schedule for each vehicle in V . Our mode l for disruption managem ent with reschedu ling of trip s an d veh icle circu lations is based o n th e widely used concept of an e vent-ac ti v ity network. This stru cture was sug gested b y Ser afini an d Ukovich [22] and also u sed b y Nac htigall [ 23] fo r p eriodic tim etabling problem s, see also [24]. In the context of delay management p roblems e vent-activity network s are used in [4]. W e use a model similar to [6] an d extend the e vent-activity network to acc ount for early turnaro unds and capacity constraints at the station platforms. An event-activity N = ( E , A ) is a directed gr aph, where the n odes in E denote th e events and the ed ges in A are called acti vities. In our setting the timetab le π consists of sched uled trips . A trip conne cts two stations with a specified train via a certain track. A sequence of consecutive trips between two terminal stations is called a line . A sequence of lines is called a cir culation. Each trip genera tes two events: a d eparture e ve nt v ∈ E dep from a station, and an arrival event w ∈ E arr at an adjacent station . These two events are con nected by a driving activity a = ( v , w ) . T ogether, they model a constraint between those e ven ts, meaning that e vent w cannot happen before e vent v has taken place, plus the minimum duratio n L a assigned to activity a . 3 Similar to [4], we distinguish between different types of acti vities. T rain activities ( A train ) rep resent the driving, waiting and tur ning operations of a train. 1. Driving activities ( A dri ve ⊂ E dep × E arr ) represent scheduled trips between two stations. 2. W aiting activities ( A wait ⊂ E arr × E dep ) represent the scheduled waiting times at a station to let pa ssengers enter and lea ve the train. 3. T urning activities ( A turn ⊂ E arr × E dep ) connect an arri val ev ent with a d eparture e vent, but in additio n to waiting arcs, th e events co nnected b y a tur ning activity d o n ot b elong to trip s o n th e same line; instead, th ey r epresent the possibility for trains to truncate their current circulation and continue on an different line . Headway activities can be split into two subsets o f activities that d eal with th e limited cap acity of tr acks between two stations ( A track ) or on a platform ( A station ) : 1. The head way activities ( A track ⊂ E dep × E dep ) mode l th e headway co ndition between two events that share the same trac k resource betwee n two stations. For each a = ( v , w ) ∈ A track , there is a corr espondin g activity ˜ a = ( w , v ) ∈ A track so that toge ther th ey m odel a prece dence con straint, i.e., indicate which o f the departure events will take place first. Thus, only one of each pair of activities can be acti ve. 2. If we h av e to ro ute trains throug h a corridor consisting of several stations on a single track, we h av e to intro duce a seco nd k ind of headway activity ( A station ⊂ E arr × E arr ). These ha ve to make sure that trains driving in opposite directions do not enter the same platf orm an d block each other; in other words, they ensur e tha t the d eparture ev e nt of som e train takes place bef ore anoth er train arrives at the same platfo rm. Unfortu nately , two arrival ev e nts could imply m ore than on e pair of p receden ce constraints. In fact, this kind of h eadway activities in volves four events, i.e. each possible departure e vent co rrespond ing to the arriv al events. In our model we add the possibilities fo r tr ains to tu rn at certain po ints, so the point of time a train m ay e nter a station is stron gly connected to the direction of the successi ve trip of the train. In addition, the headway constraints transmits the priority decision taken f rom th e precedence constrain ts on the tracks of one side of the station to the other side. As an examp le, consider two trains k , l ∈ V and th ree station A , B , C ∈ S . T r ain k moves from station A th rough station B to station C and train l dri ves into the opposite d irections from station C through station B to station A . So if th e de parture event from station A to B of train k is sched uled to take place befo re the d eparture event of train l at station B to A , then also train k has to depart from station B to C be fore train l leaves station C in opposite directions to station B . In our model trains could be ord ered to return to a depot and reserve trains may be inserted. Therefor e, we extend the e vent-ac ti v ity network by adding depots D i ∈ D and replacemen t capacities R D i for e ach depot. For each trip that ends at a station conn ected to a depot we add a trip to the d epot, i.e., a depar ture event at the station and an arriv al event at the de pot con nected by a driving activity . The sets E depot contains the arriv al ev ents at th e dep ots an d A return the co rrespon ding driving activities. Trains stored in the dep ots may b ecome re inserted after a m inimum id le time, so analo gously , the arri val events at a depot bec ome conn ected to the departure events of possible follow on trips. Similarly , replacement capacities are inserted, by add ing an e vent r ∈ E repl for ea ch depot supplying replacemen t vehicles and connecting them to the network. Despite resched uling the timetab le events our model should be able to modify the veh icle schedu les to find feasible new circulatio ns, p erform un planned tur ns or to retu rn to a dep ot at cer tain station . Therefo re,a classical flow mod el is integrated. Each acti vity a ∈ A train can transport a flo w of at most one unit. For each event i ∈ E , the outflow eq uals the in flow . Thu s, every e vent with an ingoin g acti vity arc that transp orts one u nit of flow has a pr edecessor event and due to flow co nservation is also conn ected to a successor event. The goal is to fin d feasible flows in th e network , i.e., trains alw ays have a seq uence of following trips and do not stand idle and block the tracks. A feasible timetable π ∈ N E 0 assigns a time π v to each timetable ev e nt v ∈ E and a feasible fl ow throug h the network represents the circulation of trains. 4 3.2 Integer Programming F ormulation A solution of the f ollowing integer programming mod el yields a new feasible dispatchin g timetab le π ∗ ∈ Z E + and v ehi- cle schedule in case of a disruption based on th e original time table π ∈ Z E + and the corresponding vehicle circulations. max ∑ v ∈ E dep ∑ a ∈ δ + ( v ) c a y a (1) subject to M ( 1 − y a ) + x w + π w ≥ x v + π v + L min a ∀ a = ( v , w ) ∈ A train , (2) M ( 1 − y a ) + x w + π w ≤ x v + π v + L max a ∀ a = ( v , w ) ∈ A driv e , (3) M ( 3 − ∑ a ∈ δ + ( w ) y a − ∑ a ∈ δ + ( v ) y a − g vw ) + x w + π w ≥ x v + π v + L vw ∀ ( v , w ) ∈ A track , (4) g vw + g wv = 1 ∀ ( v , w ) ∈ A track , (5) − M ( 3 − y vw − y v ′ w ′ − h vv ′ ) + x w + π w + S vv ′ ≤ x v ′ + π v ′ ∀ ( v , w ) , ( v ′ , w ′ ) ∈ A train : ( v , v ′ ) ∈ A station , (6) h vv ′ + h v ′ v = 1 ∀ ( v , v ′ ) ∈ A station , (7) ∑ a ∈ δ − ( v ) y a − ∑ a ∈ δ + ( v ) y a = 0 ∀ v ∈ E dep ∪ E arr , (8) ∑ a ∈ δ − ( v ) y a − ∑ a ∈ δ + ( v ) y a ≤ 1 ∀ v ∈ E depot , (9) ∑ a ∈ δ + ( v ) y a ≤ R D i ∀ v ∈ E repl , D i ∈ D , (10) y a ∈ { 0 , 1 } ∀ a ∈ A , (11) x v ∈ Z + ∀ v ∈ E , (12) g a ∈ { 0 , 1 } ∀ a ∈ A track , (13) h a ∈ { 0 , 1 } ∀ a ∈ A station (14) The variables of th e model a re as f ollows: y is the cir culation of tra ins, x v determines the d elay of event v , g a and h a represent precedence con straints ( see belo w) . In the following, we successi vely discuss the constraints of the above model. The o bjective fu nction (1) aims at maximizin g the nu mber of trips th at still will be served in the r e-optimized dispatching timetable π ∗ , possibly with d elay . Because the frequency of most subway system s is quite high, canceling few trips will lead to only a m inor delay and inconv e nience fo r the p assengers. Therefore, min imizing the overall delay , as it is done in most publications about delay management, is only a secondary goal. A trip is served if the correspo nding departure event v ∈ E dep has an outflow of one un it of flow , i.e., a = ( v , w ) ∈ A dri ve is part of a train cir culation. W e can attach an ad ditional co st coef ficien t c a to each dri vin g activity a ; this a llows a weighting of the trips. Giv en an o riginal timetable π and a corr espondin g vector x ∈ Z E + , representin g the delays x v of each event v , Constraints (2) r equire that if an activity a = ( v , w ) is in the solutio n, t he earliest time for e vent w to start is the starting time of the predecessor event π v , plus the oc curred delay x v and the minimum dur ation L min a of acti vity a . With respec t to the buffer times, a delay x v of event v might cau se a delay x w of the suc cessor event w . W e assum e that th e driving times are sy mmetric. Constraints (3) make sure that a driving activity a is bo unded b y a m aximal d uration L max a , which inclu des possible buffer times and saf ety ma rgins, b ut sho uld no t be to o large to p revent trains being id le for a long period o f time. T he prece dence co nstraints form ulated by (4) an d (5) for shar ed track resources, come in pairs for ( v , w ) , ( w , v ) ∈ A track and ensu re that conflicting events v , w ∈ E dep that u se the same track resource are correctly 5 Station A Station B Station C driving driving driving driving u v w z u ′ v ′ w ′ z ′ g uw ′ g w ′ u g wu ′ g u ′ w h vv ′ h v ′ v a ˜ a waiting waiting Figure 1: The event-activity network for a conflict o n a single track . One train is driving fr om station A to station C while anoth er tr ain is dr iving in the o pposite direction . The nodes re present the cor respondin g depa rture and ar riv al ev e nts a nd a , ˜ a the waiting activities. Furthermo re the disjun cti ve headway acti v ities are shown, denoted b y the variable name of correspon ding c onstraint of the IP . scheduled to prevent d eadlocks and keep safety margins. Th e model implies g vw = 1 : if event v takes place before w , 0 : otherwise, where L vw represents the minimal waiting time for event w to start if w is sched uled after v . If the trips correspo nding to the departure e vents v , w ∈ E dep use the track in the same direction, L vw is the safety margin between b oth departure ev e nts; if the track is used in opposite direction, L vw contains the ma ximum allo wed transit time f or the trip and a safety margin S vw . Similarly the prec edence co nstraints ( 6), (7 ) fo r th e track s inside a station ensu re tha t no two trains u se the same platform at the same time, where the model implies h vv ′ = 1 : if event w takes place bef ore e vent, v ′ 0 : otherwise. Regarding two con flicting a rriv al events v , v ′ ∈ E arr at some station and th eir co rrespond ing dep arture events w , w ′ ∈ E dep with a = ( v , w ) , ˜ a = ( v ′ , w ′ ) ∈ A train denoting th e activities, if the solutio n co ntains bo th activities ( y a = y ˜ a = 1 ) and h vv ′ = 1, dep arture e vent w takes place before the arriv al event v ′ at the platfo rm with respect to the safety margin S vv ′ (see Figure 1). The safety margins S vw and S vv ′ should be equal and depen d on the direction of the correspo nding t rips: Lemma 1. The safety mar g in S vv ′ for two tr ains driving in op posite dir ectio ns that en ter and leav e a sta tion on the same trac k sho uld satisfy S vv ′ > 1 2 max { ( L max wz − L min wz ) , ( L max uv − L min uv ) } . Pr oof. Th e event a cti vity n etwork f or two tr ains, driving th rough a station in opposite d irections on a single tr ack is shown in Figure 1. In this case, we hav e y a = y ˜ a = 1 , i.e., the solu tion con tains these c onflicting trip s. T o simplify notation, we set π ∗ v = π v + x v for all v ∈ E , and we use th e new times of a dispatching timetab le. I n o rder to obtain a feasible timetable, the headway variables g uw ′ , h vv ′ , g wu ′ should be equal. W e sho w that S vv ′ > 1 2 max { ( L max wz − L min wz ) , ( L max uv − L min uv ) } implies g uw ′ = h vv ′ = g wu ′ = 1. 6 Station A Station B Station C driving driving driving driving u v w z u ′ v ′ w ′ z ′ g uw ′ g w ′ u g wu ′ g u ′ w h vv ′ h v ′ v turning turning Figure 2: Example: Trains are allowed to tur n at B (i) h vv ′ = 1 ⇒ g wu ′ = 1 If h vv ′ = 1 then π ∗ w + S vv ′ < π ∗ v ′ , because of (6 ). W e h av e L u ′ w = S u ′ w + L max u ′ v ′ = S vv ′ + L max u ′ v ′ . If g wu ′ = 0, it follows that π ∗ w ≥ π ∗ u ′ + L min u ′ v ′ + S vv ′ π ∗ w + S vv ′ ≥ π ∗ u ′ + L min u ′ v ′ + 2 S vv ′ π ∗ v ′ ≥ π ∗ u ′ + L min u ′ v ′ + 2 S vv ′ π ∗ v ′ + L max u ′ v ′ ≥ π ∗ u ′ + L max u ′ v ′ + L min u ′ v ′ + 2 S vv ′ ≥ π ∗ v ′ + L min u ′ v ′ + 2 S vv ′ L max u ′ v ′ ≥ L min u ′ v ′ + 2 S vv ′ S vv ′ ≤ 1 2 ( L max u ′ v ′ − L min u ′ v ′ ) , which is in contradictio n to the condition on S vv ′ . (ii) g wu ′ = 1 ⇒ h vv ′ = 1 Assume g wu ′ = 1 an d h vv ′ = 0 . Because o f ( 4), we have π ∗ u ′ ≥ π ∗ w + L min wz + S vv ′ . Because of (6) and h vv ′ = 0, it follows tha t π ∗ u ′ ≥ π ∗ v ′ + S vv ′ + L min wz + S vv ′ , which is in contradiction to the condition of S vv ′ > 0. (iii) h vv ′ = 1 ⇒ g uw ′ = 1 and (iv) g uw ′ = 1 ⇒ h vv ′ = 1 can be shown an alogously . ✷ Remember that we can not always express the headway constrain ts via a single variable, as the condition g uw ′ = h vv ′ = g wu ′ does not hold, if trains are allowed to turn (see Figure 2). As we described above, a flow mo del is in tegrated to model the c irculation o f tr ains. Constraint (8) e nsures flow conservation on the e ven ts, i.e., the outflow shou ld be equal to t he inflo w . A flow in the n etwork encodes the sequence of tr ips fo r each train du ring the observed time interval. Note that train s repr esent a single com modity . Depots can consume flo w (9) and in itiate flow (10) with respect to the maximum number o f replaceme nt trains R D i of depot D i ∈ D . The big- M ha s to be chosen sufficiently large in order to yield a correc t model; analogous to [6], we set M : = Y + max ( v , w ) ∈ A ( π w − π v + L vw + S vw ) , where Y denotes the maximu m allowed delay for each event and we let L vw = S vv ′ = 0 , on arcs where they have not been defined . In ou r case Y is bou nded by the cycle time. W e summarize: Observation 1. F easible dispatching timetables π ∗ = π + x corr espo nd pr ecisely to th e feasible solutio ns of the inte ger pr ogram with constr a ints (2)–(14 ). 7 3.3 Reducing the Size of the Integer Program The computational run ning time for solving the IP is mainly influ enced b y th e nu mber of precedence con straints in the system . These constraints inv olve big- M constants and thu s lead to a weak LP relaxation: here we can set each g a and h a with a ∈ A head to 1 2 . This m akes it desirable to redu ce the numb er of precedence constraints by fixin g them wherever po ssible. This can be achieved by considering the sch eduling logic inherent in th e system. If a disruption occurs, decisions for parts of th e network imply decisions for other p arts, e.g., if there are alternating seq uences of driving and waiting activities with no turning p ossibilities. Further more, trains driving into the sam e direction can not pass each other . Thus, v aria bles can be fixed by using the natural precedence relations. I n a second step, we can build blocks of such sequence s an d contrac t the dr iving an d waiting acti vities into just o ne driving activity with the new minimum driving time. Because the delay of a n e vent is pa ssed to successiv e events, th e tra vel time is bounded by the maximum allo wed delay with respect to the b u ffer times. Safety intervals are inherited from the o riginal event-activity network. The cost of the d eparture e vents is set to the sum of the co rrespon ding contra cted depar ture e vents. This process yields a r educed event-a ctivity n etwork N r = ( E r , A r ) . Lemma 2. An instance of the r ed uced network N r = ( E r , A r ) has a feasible solution, if and only if the corr espo nding instance of the original event-activity network N = ( E , A ) ha s a feasible solution, and their objectives ar e equal. Pr oof. Let π r be a feasible dispatchin g timeta ble for the reduced event-acti vity network N r = ( E r , A r ) . Let a = ( v , w ) ∈ A r be a dri v ing activity , and let E vw seq ⊂ E dep ∪ E arr be the correspond ing seq uence of events from the start e vent v ∈ E dep to the end e vent w ∈ E arr . If x v ≥ x w in N r , we reduce th e delay of the events along the sequenc e as late as po ssible; this is necessary to p revent blo cking of following trains. If x v ≤ x w , we increa se the delay as soon as p ossible to prevent a collision with the train in front. Th e other direction follows an alogously . ✷ Note th at the overall d elay o f a dispatch ing in the the original n etwork N that results fr om the application o f the strategy in the above pr oof might be higher than th e minimal possible delay in N . This impo ses no s e rious restriction, since our objective is insen siti ve to delays. The reduced network N r usually contains significantly fewer nod es a nd a rcs, resultin g in a sma ller IP instance. This enab les us to ob tain solutions for significantly larger networks; in ou r experiments, the nu mber of b inary variables was reduced by roughly a factor of t hree. 4 Experiments In this section we report o n com putational experim ents, which we cond ucted to ev aluate the ap plicability of our models. Th ey are based on the real-life timetable of the subway line U6 in V ienna (Figure 3). W e employed the Falk o tool of Siemens A G [25]. T imetab les are gi ven with a granular ity o f one second. The considered subway lin e has 24 s tations, with terminal stations Siebenhirten and Floridsdorf; the re g ular tra vel time between these termin als is 34 minutes. W e use typical frequen cies of 5 or 10 minutes in our experiments. Trains are cir culating between the termina ls. Th e stations Flo ridsdorf, Michelbeuern, an d Alterlaa are conn ected to depots that each contain a reserve train in ou r scen arios. Sidin gs exist at Siebenhirten. Our initial time table co ntains buf f er times of about 10% of the scheduled driving times between stations and at the end of the line. W e consider a variety of different disruptions with foc us on the blockage of one side of the two tra cks. Such disruption s often yield very hard instances and lead to se vere p roblems in the daily operation o f a line. During a disruption , a section of tracks on one side is blo cked for a time in terval between 5 minutes and 2 hou rs; until the section is reo pened, n o train is allowed to enter the blo cked section. The track topology allows switching the trac k and perfor ming a turn at se veral stations. Trips affected by t he blocked section can use the unblocked tr ack in th e opposite direction. Mor e specifically , we allow trains to pass the switches that are immed iately b efore an d af ter the blocked section. The circulation of a train can be truncated by introducing a turning. For each scenario below , we use ou r model to gen erate a feasible dispatch ing timetable. W e ha ve to return to the original timetable within 6 0 minutes af ter reopening the b locked sectio ns. Cho ices for tr ains include tu rning at specified stations, increasin g their delays, or returning to a depot; the maximu m allo wed de lay of a trip is equal to the cycle time. 8 Siebenhirten Erlaaer Str. Alterlaa Philadelphiabr¨ uck e W estbahnhof Michelbeuern Nussdorfer Str. Alser Str. Thaliastr. Spittelau Floridsdorf 04 02 09 15 18 22 23 26 28 34 Josefst¨ adter Str. 20 00 U6 Burggasse 17 Figure 3: The V ie nna subway line U6. Boxes represent the stations: a white box , if the station is connected t o a depot or siding. Th e numbers below are t he driving time s from Siebenhirten to the stations. 4.1 Results W e tested fo ur scenario s on the V ienna U 6 tha t differ in loc ation, tran sit times, the top ology of the switch es an d turn possibilities to ev aluate the impact of disruption s: Scenario 1: A disruption o ccurs b etween Michelbeu ern and W estbahnhof. These station s ar e lo cated clo se to the center of the line an d ar e he avily used. T rip s between th ese stations ar e assigned to the opposite track. T ra ins runnin g fro m Michelbeuern to W estbahnhof hav e to switch the track after Michelbeuern and return to their originally assigned track between Burggasse and W estbahnh of. W e allo w train s to turn at Michelbe uern and W estbahnhof . The driving time betwee n these stations is ab out 7 m inutes and the trains have to share the same track in 4 stations. Scenario 2: A d isruption occu rs between Ph iladelphiab r ¨ u cke an d Er laaer Straße that are loc ated near the terminal station Sieb enhirten. Trains have to switch the track in fron t of the station Ph iladelphiabr ¨ ucke and back again before arriving at Erlaaer Straße. W e allow t rains to turn at th ese stations. The driving tim e is 7 minutes and the trains share the same track in 4 stations. Th e depot Alterlaa is located between those stations. Scenario 3: A disrup tion occurs between Nuß dorfer Straße and Mich elbeuern . Trains h av e to switch shor tly after Nußdor fer Straße an d return to th eir original track bef ore arriving at Michelbeuern. Optio ns for turnin g are giv e n at Michelbeu ern and (for trains going to Floridsdorf ) after Spittelau. T he driving time through the bottleneck is 3 minutes but points f or turning are not close to the bottlenec k section. Scenario 4: Here, a d isruption o ccurs between Alser Straße a nd Tha liastraße, so that trains h av e to switch the track after Miche lbeuern and retu rn after Josephst ¨ adter Straße. The driving time between th ese stations is 5 minutes and the o ptions for turning are given at Michelbeuern and W estbahnhof, which are not c lose to the disrup ted track section. For our exper iments, we used the IP so lver CPLEX 12 .1 on a PC with a 3. 0 GHz Inte l Core2Duo CPU and 2 Gbytes of RAM. The tables 1 – 6 are organized b y scenarios an d cycle frequ encies; r ows cor respond to disruptio n tim es in minu tes, indicated in the first co lumn. Colu mns 2 shows the numb er of b inaries th at cor respond to the prece dence constrain ts and the flo w o n th e activity arc s. All comp utations were performed using the red uced n etwork. Column 3 g iv es th e number o f ge neral variables f or th e de lays. Th e fo urth co lumn shows the original numb er of trip s in the undisru pted timetable du ring the observed time window . Column 5 shows the number of trips in the new d ispatching timetab le, derived with CPLEX in a maximum runtime of 18 00 seconds, while th e sixth colu mn provides the best bo und provided by C PLEX. Column 7 shows the necessary solution time in secon ds, or (in case of de lays o f 45 minutes or more) 18 00 if CPLEX c ould no t establish optimality o f a solutio n withing 1 800 seco nds. Colum n 8 in dicates wh ether op timality could be p roved, or th e gap with respect to an upper boun d. The fina l colum n 9 shows the numb er of trips in the disposition timetable, if we s to p CPLEX fin ding a solution in only 60 seconds and succeed in finding at least a feasible solution. For this com putation, the MIP node selection strate gy of CPLEX is set to best estimate search. 9 T able 1: S C E N A R I O 1 : D I S RU P T I O N B E T W E E N M I C H E L B E U E R N A N D W E S T B A H N H O F , C Y C L E T I M E O F 5 M I N U T E S dur bin int | A d e p | sol u.bound time sta tus 60s 5 628 306 171 165 165.00 0.25 opt 165 10 745 331 177 171 171.00 3. 41 opt 171 15 861 356 198 183 183.00 0. 87 opt 183 20 978 381 207 189 189.00 9. 42 opt 189 30 1215 431 231 207 207.00 24.88 opt 207 45 1578 506 267 231 231.00 141.56 opt 228 60 950 581 303 252 269.63 1800 7.0% 252 90 2721 731 375 276 351.14 1800 27.2% – 120 3528 881 447 – 424.62 1800 – – T able 2: S C E N A R I O 1 : D I S RU P T I O N B E T W E E N M I C H E L B E U E R N A N D W E S T BA H N H O F , C Y C L E T I M E O F 1 0 M I N - U T E S dur bin int | A d e p | sol u.bound time sta tus 60s 5 254 150 85 85 85.00 0.08 opt 85 10 307 164 92 92 92.00 0.09 opt 92 15 365 175 97 97 97.00 0.89 opt 97 20 416 189 104 104 104.00 0. 13 opt 104 30 524 214 116 110 110.00 4. 04 opt 110 45 694 250 133 127 127.00 231.72 opt 127 60 854 289 152 146 146.00 559.87 opt 140 90 1193 364 188 170 188.00 1800 10.5% 170 120 1453 439 224 200 224.00 1800 12.0% 197 T able 3 : S C E N A R I O 2 : D I S RU P T I O N B E T W E E N P H I L A D E L P H I A B R ¨ U C K E A N D E R L A A E R S T R . , C Y C L E T I M E O F 5 M I N U T E S dur bin int | A d e p | sol u.bound time sta tus 60s 5 819 327 172 162 169.00 1.51 opt 162 10 913 353 184 184 184.00 0.28 opt 184 15 1092 379 196 183 183.00 5.30 opt 183 20 1231 405 208 192 192.00 7.64 opt 192 30 1515 457 232 209 209.00 59.11 opt 209 45 1956 535 268 236 243.00 1800 2.9% 235 60 2415 613 685 258 284.31 1800 10.2% 252 90 2721 731 375 276 351.14 1800 27.2% 272 120 3528 881 447 – 424.62 1800 – – T able 4 : S C E N A R I O 2 : D I S R U P T I O N B E T W E E N P H I L A D E L P H I A B R ¨ U C K E A N D E R L A A E R S T R . , C Y C L E T I M E O F 1 0 M I N U T E S dur bin int | A d e p | sol u.bound time status 60s 5 348 158 86 86 86.00 0.08 opt 86 10 411 177 92 92 92.00 0.09 opt 92 15 473 184 98 98 98.00 0.14 opt 98 20 511 203 1 04 104 104.00 0.90 opt 104 30 623 229 1 16 116 116.00 0.12 opt 116 45 863 262 1 34 130 130.00 24.65 opt 130 60 1065 307 152 146 146.00 591.15 opt 145 90 1482 385 188 180 184.87 1800 2.7% 174 120 1917 463 224 209 221.00 1800 5.7% 209 10 6:00 7:00 SH WS MB FL Figure 4: An excerpt o f th e time and space diag ram of a n ew dispatching tim etable. The diag ram shows 4 trains cir- culating between the terminal stations Sieben hirten (SH) and Floridsdorf (FL). Due to a disrup tion between 6.00 a.m. and 7.00 a. m. only one track between W estbahnho f (WS) and Michelb euern (MB) can be u sed. Th us, the schedules o f the trains represented by the dashed and dotted lines become modified . 4.2 Observations W e were ab le to find feasib le solutions fo r most of th e instance s, including the rela ti vely difficult scenarios with lon g disruption times. I n most cases, these solution s we re achieved quickly , while the bulk of the work was invested in establishing optimality . This ind icates th at our metho d sh ould b e suitable in even larger real-life situations in which a fast solu tion is need ed a nd proving its o ptimality is a seco ndary con cern. As descr ibed above, the LP re laxation is weak. I ndeed, it has a large gap com pared to th e IP fo rmulation . As a consequ ence th e up per bo unds are imp roved late du ring the solu tion p rocess. If these b ound s become m ore imp ortant, it may b e o f inter est to establish add itional inequalities. For p ractical pur poses, the ac tual structure of the r esulting vehicle schedu les is of interest. An excerpt of a tim e and space diag ram for the re-op timized timetable and vehicle schedule for a d isruption of 60 min utes in Scenario 1 is shown in Figu re 4. The utilization of th e tracks is g enerally high. But in the c omputed solutions, trains are still p assing throu gh the bottleneck section. The frequency , h owe ver, is heavily decr eased. The n ew vehicle schedule co ntains 2 0 ear ly tu rn operation s. All of the thr ee replacement trains are used, in order to realize the ne w timetab le. 4.3 Extensions Every chan ge in the vehicle schedu le needs to be d istributed quickly to th e inv olved per sons. Furthermore, tru ncated circulations, caused b y early turns or vehicles return ing early to a depot, lead to necessary transfers for th e passengers. Thus, it is desire d to keep the nu mber o f tran sfers in the vehicle sched ule r easonably low . T o achieve this, we add a second term to the objective fu nction by penalizing early turns and early returns to a depot: max ∑ v ∈ E dep ∑ a ∈ δ + ( v ) c a y a − ∑ b ∈ A turn ∪ A return c b y b . (15) Each unplan ned turn ing or early return to a depo t p enalizes the objective value by c b . This results in a trade- off between the numb er of recovered weig hted trips and the transfers for passengers. In first experim ents, we were able to find solutions w ith sign ificantly less tran sfers f or th e p assengers, but on ly a few more canceled trips. Fine tun ing the weight coefficients c a and c b is important, since they have big impact on the design of the circulation s provided by solution . 11 W e a re optimistic that the intera ction with practitioners may help in design ing better models, with pref erences for particular solution ty pes. For example, if the minimal transfer time of th e disrupted section is quite small compared to the cycle fr equency , delaying the affected trips could b e sufficient. Furtherm ore, computed solutions often have an alternating structu re: the disposition time table o ften builds clusters of tr ips (with respect to their safety distance) an d let these cluster s alter nate th rough the b ottleneck. On the other h and, if the tr ansfer time is too large, just delay ing trips is not sufficient, trip s ha ve to be drop ped an d the solutions often contain shuttle trains. Finally , allo win g trains to turn within the bottleneck yields some good solutions. 5 Conclusions W e have introduced techniq ues for integrated resche duling of tr ips and vehicles f or real-tim e disruptio n managemen t of rail-based p ublic transpor tation systems, esp ecially f or su bway systems. Using an IP f ormulation an d a pprop riate reduction tech niques, we were able to ach iev e very good solutions for a variety of test scenar ios arising fr om a re al- world subway line. T ests show that ou r feasible solutions are always optimal or close to b eing optimal, indicatin g the practical usefulne ss o f our method . The spectru m of f urther impr ovements includes fine-tun ing of ou r IP/LP a pproach an d explo iting the stru cture of the underly ing networks to reduce the solution sp ace in advance. W e would like to deal with la rger-scale networks, for examples (subway) s y stems that do not have separ ated track system for each line. Ackno wledgment Martin Lorek gratefu lly acknowledges sup port from Siemens A G by a r esearch fellowship. W e thank th e members of the Rail Autom ation Dep artment, Mobility Division o f Siemens AG, in particular Y ork Schmidtke, Karl-Heinz Erhard and Gerhard Ruhl, for many helpful con versations and an ongoing fruitful collaboration, and for the use of F alko. Refer ences [1] Jespersen-Gro th, J., Potth off, D., Clausen, J., Hu isman, D., Kroon, L. G., Mar ´ oti, G., a nd Nielsen, M . N., 20 09. “Disruption managem ent i n passenger railway transportation”. In Robust and Online Lar ge-Scale Optimization , R. K. Ahuja, R. H. M ¨ ohring, an d C. D. Z aroliagis, eds., V ol. 5868 of Lectur e Notes in Computer Science . Springer, pp. 399– 421. [2] Liebchen , C., 20 06. “Periodic timetable optimization in public transport”. Dissertation, TU Berlin. [3] Sch ¨ obel, A., 2 001. “ A mod el for th e de lay m anagemen t problem based o n m ixed-integer programm ing”. Elec- tr onic Notes in Theor e tical Computer Science, 5 0 (1). [4] Sch ¨ obel, A., 2007. “I nteger programmin g app roaches for solving the delay manage ment problem”. In Alg orith- mic Methods for Railway Optimization , no. 4359 in Lecture Notes in Computer Science. Springer, pp. 14 5–170 . [5] Schachtebe ck, M., an d Sch ¨ obel, A., 2008. “IP-based tech niques fo r delay manage ment with pri- ority decisions”. In A TMOS 2008 – 8th W ork shop on Algorithmic Ap proache s fo r Transporta- tion Modeling, Optimization, and Systems, M. Fischetti and P . W idm ayer, ed s., Schloss Dagstuhl. http:/ /drops.dags tuhl.de/opus/volltexte/2008/1586 . [6] Schachtebe ck, M., 2009. “Delay m anagemen t in public transportation : Capacities, robustness, and integration ”. Dissertation, Universit ¨ at G ¨ ottingen. [7] Gatto, M., Jacob, R., Peeters, L., an d Sch ¨ obel, A., 2005. “The computational complexity of delay mana gement”. In Graph -Theore tic Concepts in Computer Science: 3 1st Inter national W ork shop, WG 2005 , D. Kratsch, ed., V ol. 3787 of Lectur e Notes in Compu ter Science . 12 [8] Caprara, A., Fischetti, M., and T o th, P ., 2002. “Modeling and solving the train timetabling problem ”. Op erations Resear ch, 50 ( 5), pp. 851–861. [9] Hofman , M., Mad sen, L., Groth , J. J., Clausen, J., and Larsen, J., 2006. “Robustness and r ecovery in train scheduling – a case study f rom DSB S-to g a/s”. In A TMOS 200 6 – 6th W o rkshop on Algorith mic M eth- ods and M odels fo r Optimization of Railways, R. Jacob and M. M ¨ uller - Hanneman n, ed s., Schloss Dagstuhl. http:/ /drops.dags tuhl.de/opus/volltexte/2006/687 . [10] Biederbick , C., and Suhl, L. , 200 4. “Decision support tools for custom er-oriented dispatch ing”. In A TMOS, F . Geraets, L. G. Kro on, A. Sch ¨ obel, D. W agner, an d C. D. Zaroliag is, eds., V ol. 43 59 of Lectur e Notes in Computer Science , Springer, pp . 171–183. [11] Gely , L., Feillee, D., and Dessagne, G., 2009. A cooperativ e framew o rk between optimization and simulation to adress on-line re-schedu ling problem s. T ech. Rep. 17 8, ARRIV AL project. [12] T ¨ ornquist, J., 2006. “Computer-based decision suppo rt for railw ay traffic scheduling and dis- patching: A re view o f mod els and algorith ms”. In 5th W orksh op on Algorithm ic Methods and Models for Optimization of Rail ways, L. G. Kroon and R. H. M ¨ ohr ing, ed s., Schloss Dagstuhl. http:/ /drops.dags tuhl.de/opus/volltexte/2006/659 . [13] T ¨ ornquist, J., and Persson, J. A., 200 7. “N-tracked railw ay traffic re-scheduling dur ing distur bances”. T rans- portation Resear ch P a rt B: Methodologica l, 4 1 (3), pp. 342–3 62. [14] Gatto, M., and W id mayer, P ., 2007 . On Robust Online Job Shop Scheduling. T ech. Rep. 62, ARRIV AL Project. [15] Nielsen, L. K., 2008 . A Decision Support Fr amew o rk fo r Rolling Stock Rescheduling. T ech. Rep. 158, AR- RIV AL Project. [16] Bornd ¨ orfer, R., an d Schlechte, T ., 2 007. “Solvin g ra ilw ay track a llocation prob lems”. In Operatio ns Research Proceeding s 2 007, J. Kalcsics and S. Nickel, eds., pp. 117–12 2. [17] Cacchiani, V . , Cap rara, A., and T o th, P ., 2008. “ A column generation appr oach to train timetabling o n a cor ridor”. 4OR, 6 (2), pp. 125 –142. [18] Huisman, D., 2007. “ A column g eneration approach for the rail cre w re-scheduling p roblem”. Eur opean J ourna l of Operational Resear ch, 18 0 (1), pp. 163–17 3. [19] V eelentur f, L. , Potthoff, D., Huisma n, D., and Kro on, L., 2 009. Railw a y crew re scheduling with r e- timing. Econom etric Institute Repo rt EI 2009 -24, E rasmus University Rotterd am, Eco nometric Institute. http:/ /ideas.repe c.org/p/dgr/eureir/1765016746.html . [20] Clausen, J., Larsen , A., Lar sen, J., and Rezan ov a, N. J., 201 0. “Disruption m anagemen t in the air line industry – concepts, models and methods”. Computers and Operations R esear ch, 37 (5 ), pp. 809–82 1. [21] Liebch en, C., 2008. “Linien -, Fahrplan-, U mlauf- und D ienstplanoptim ierung: W ie weit k ¨ onnen diese bereits integriert werden?” . In Heureka ’08 – Optimierung in Transport und V e rkehr , T a gungsbe richt, M. Friedr ich, ed., FGSV V erlag. [22] Serafini, P ., and Ukovich, W ., 198 9. “ A mathem atical mode l for period ic schedulin g prob lems”. SIAM Journal on Discr ete Math ematics, 2 (4), pp. 550–58 1. [23] Nachtigall, K., 1998. “Period ic n etwork optimization and fixed interval timetab les”. Habilitationsschrift, Deutsches Zentrum f ¨ ur Luf t- und Raumfahrt, Institut f ¨ u r Flugf ¨ u hrung , Braun schweig. [24] Opitz, J., 200 9. “Au tomatische Erzeug ung u nd Optimierung v o n T aktfahrp l ¨ anen in Schienenv e rkehrsnetzen”. Dissertation, T ech nische Uni versit ¨ at Dresde n. [25] K.-H. Erhar d, Y . Sch midtke, H. S., 2000 . “Falko: Fahrplan-validierun g u nd -konstruktion f ¨ ur spu rgebundene verkehrssysteme”. Sign al+Draht, 92 . 13 T able 5 : S C E NA R I O 3 : D I S R U P T I O N B E T W E E N N U SS D O R F E R S T R A SS E A N D M I C H E L B E U E R N , C Y C L E T I M E O F 5 M I N U T E S dur bin int | A d e p | sol u.bound time s tatus 60s 5 786 431 224 224 224.00 0.19 opt 224 10 891 462 238 233 233.00 0.77 opt 233 15 999 393 252 247 247.00 2.12 opt 247 20 1109 524 266 261 261.00 3.00 opt 261 30 1335 568 294 282 282.00 158.54 opt 283 45 1698 679 336 317 330.00 1800 4.1% 330 60 2061 772 378 352 372.00 1800 5.6% 372 90 2859 958 462 411 462.00 1800 12.4% 462 120 3729 1114 546 467 546.00 1800 16.9% 546 T able 6: S C E NA R I O 4 : D I S RU P T I O N B E T W E E N A L S E R S T R A SS E A N D T H A L I A S T R A SS E , C Y C L E T I M E O F 5 M I N - U T E S dur bin int | A d e p | sol u.bound time status 60s 5 798 416 224 224 224.00 0.17 opt 224 10 935 450 240 232 232.00 3.16 opt 232 15 1072 484 256 238 238.00 97.90 opt 238 20 1211 518 272 254 254.00 71.65 opt 272 30 1495 586 304 276 293.12 1800 6.7% 276 45 1936 688 352 316 343.96 1800 8.8% 316 60 2395 790 425 351 398.00 1800 13.6% 338 90 3367 994 496 419 495.22 1800 18.1% – 120 4441 1198 592 481 592.00 1800 23.0% – 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment