Fast minimum-weight double-tree shortcutting for Metric TSP: Is the best one good enough?
The Metric Traveling Salesman Problem (TSP) is a classical NP-hard optimization problem. The double-tree shortcutting method for Metric TSP yields an exponentially-sized space of TSP tours, each of which approximates the optimal solution within at mo…
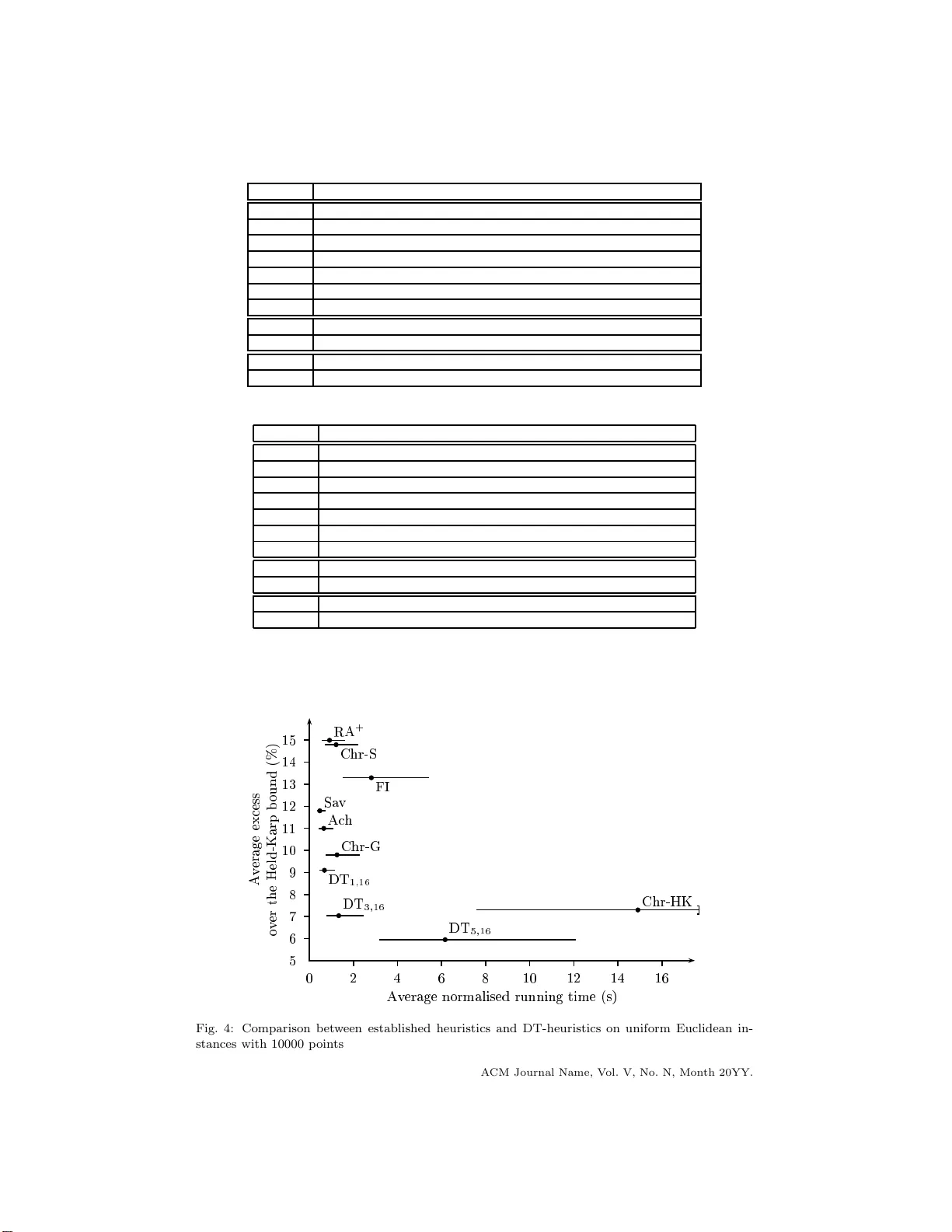
Authors: ** V. Deineko, A. Tiskin **
F ast minim um-w eigh t double-tree shortcutting for Metric TSP: Is the b est one go o d enough? VLADIMIR DEINEKO W arwick Business School and DIMAP , University of W arwick Coventry CV4 7AL, UK and ALEXANDER TISKIN Department of Computer Science and DIMAP , Universit y of W a rwick Coventry CV4 7AL, UK The Metric T rav eling Salesman Problem (TSP) is a classical NP-hard opt imization problem. The double-tree shortcu tting method for Metric TSP yields an exponent ially-s ize d space of TSP tours, eac h of whic h a pproximates the optimal solution within at most a factor of 2. W e consider the problem of finding among these tours the one that gives the closest approximation, i.e. the minimum-weight double-tr e e shortcutti ng . Burk ard et al. gav e an algori t hm for this problem, r un - ning in time O ( n 3 + 2 d n 2 ) and memory O (2 d n 2 ), where d is the maxim um node degree in the ro ot ed mi nim um spanning tree. W e give an improv ed algorithm for the case of s mall d (including planar Euclidean TSP , where d ≤ 4), running in time O (4 d n 2 ) and memory O (4 d n ). This impr o v e- men t allo ws one to solv e the problem on muc h larger i nst ances tha n pr e viously att empted. Our computationa l exp erimen ts suggest that in terms of the time-quality tradeoff, the mi nim um-weigh t double-tree shortcutt ing method pro vides one of the b est known tour-constructing heuristics. Categories and Sub ject Descriptors: E.1 [ DA T A STRUCTURES ]: Graphs and netw orks; F.2.2 [ ANAL YSIS OF ALGORITHMS AND PROBLEM COMPLEXITY ]: Nonn umerical Al - gorithms and Problems— Computations o n discr ete structur es ; G.2.2 [ DISCRETE MA THE- MA TICS ]: Graph Theory— Gr aph algorithms General T erms: Al go rithms, Experimentat ion, Performance, Theory Additional Key W ords and Phr ase s: Approx imation algorithms, Metric TSP , double-tree short- cutting 1. INTRODUCTION The Metric T r a velling Salesman P roblem (TSP ) is a c lassical com binatoria l opti- mization problem. W e represe n t a set of n p oint s in a metric space b y a complete weigh ted graph on n nodes, where the weight of a n edge is defined by the distance betw een the corr esponding p oints. The ob jective of Metric TSP is to find in this Researc h supp orted by the Cen tre f or Discrete Mathematics and Its Appl i ca tions (DIMAP), Uni- v ersity of W arwick, and by EPSRC fund EP/F017871 . Pe rmis s ion to make digital/hard cop y of al l or part of this material without fee for p ersona l or classro om use provided that the copies are not made or dis tr i but ed for profit or commercial adv ant age, the ACM copyrigh t/serv er notice, the title of the publication, and its date app ear, and notice is giv en that cop yi ng is by p ermission of the ACM, Inc. T o cop y otherwise, to republish, to p ost on servers, or to r ed istribute to l ists requires prior sp ecific p ermission and/or a fee. c 20YY ACM 0000-0000/20YY/0000 -0001 $5.00 ACM Journal Name, V ol. V, No. N, Mon th 20YY, Pages 1–0 ?? . 2 · V. D ei neko and A. Tiskin graph a minim um-weigh t Hamiltonia n cycle (equiv ale ntly , a minim um-weigh t to ur visiting e very no de at lea st once). The most co mmon example o f Metric TSP is the planar Euclidean TSP , where the p oin ts lie in the tw o-dimensional Euclidean plane, and the distances a re measur ed according to the Euclidean metric. Metric TSP , even restricted to planar Euclidean TSP , is well-known to be NP- hard [Papadimitriou 1 977]. Metric TSP is also known to b e NP -hard to a ppro ximate to within a ratio 1 . 0045 6, but p olynomial-time approximable to within a ratio 1 . 5. Fixed-dimension Euclidean TSP is known to have a P T AS (i.e. a family o f algo- rithms with approximation ratio a rbitrarily close to 1) [Aror a 1 998]; this gener alises to an y metric defined b y a fixed- dimension Minko wski vector norm. Two simple approaches, the double-tr e e metho d [Ro senkran tz et al. 1977 ] and the Christofides metho d [Christofides 197 6; Serdyukov 1978 ], allow one to approximate the solution of Metric TSP within a factor of 2 and 1 . 5, res pectively . Both methods belo ng to the cla ss of tour-c onstructing heuristics , i.e. “heur istics that incremen- tally construct a tour and stop as so on as a v a lid tour is cr eated” [Johnso n and McGeo c h 2002 ]. In bo th methods , we build an Eulerian gra ph on the g iv en point set, select an Euler to ur of the graph, and then per form shortcutting on this tour by remo ving rep eated no des, until all no de repe titio ns are removed. In genera l, it is no t prescrib ed whic h o ne of several occur rences of a particular no de to remo ve. Therefore, the methods yield an exp o nen tia lly-sized spa ce of TSP tours (s ho rtcut- tings of a sp ecific Euler tour in a s pecific Eulerian g raph), each appr oximating the optimal solution within a facto r of 2 (respectively , 1 . 5). The tw o metho ds differ in the wa y the initial weight ed Euler ian graph is co n- structed. Both star t by finding the graph’s minim um-weigh t spanning tre e (MST). The do uble-tree metho d then doubles every edge in the MST, while the C hr istofides metho d adds to the MST a minimum-w eight matching built on the set of o dd-degree no des. The weight of the resulting Eule r tour exc e e ds the weight of the optimal TSP tour b y at most a factor of 2 (resp ectiv ely , 1 . 5), and the subsequent shor tcutting can only decrease the to ur weigh t. While any tour obtained by shortcutting of the or ig inal Euler tour approximates the optimal solution within the sp ecified factor, clearly , it is still desirable to find the shortcutting that gives the clos est approximation. Given a n Euler ian g raph on a set of points, we will consider its minimum-weight shortcutting acro ss a ll sho rtcuttings of all po ssible Euler tours of the graph. W e shall co rrespo ndingly sp eak about t he minimum-weight double-tr e e a nd the minimum-weight Christofides metho ds. Unfortunately , for g eneral Metric TSP , bo th the double- tree and Chr istofides minim um-weigh t shor tcut ting pr oblems are NP-ha rd. Cons ider an instance o f the Hamiltonian cy cle problem on a n unw eighted graph; this can b e r egarded as an instance o f Metric TSP with weigh ts 1 and 2. Add a n extr a no de connected to all the original nodes by edges of w eight 1, and take the newly added edges as the MST. I t is easy to see that the resulting minim um-weigh t double-tree shortcutting problem is equiv ale nt to the or iginal Hamiltonian cycle pro blem. The minimum - weigh t double-tr ee sho rtcutting problem was b eliev ed for a long time to b e NP-hard even for plana r E uclidean TSP , until a p olynomial-time alg orithm was given by Burk ar d et al. [19 9 8]. This is the algo r ithm we improve up on in the curre n t pap er. In contrast, the minimum-w eight Christo fides shortcutting problem r emains NP- AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum-w eight double-tree sho rtcutting for Metric TSP · 3 hard ev en for planar Euclidean TSP [Papadimitriou and V a zirani 1 984]. In the res t of this pap er, we will mainly deal with the r o ote d MST , which is obtained from the MST b y selecting an arbitrary node as the r o ot . In the ro oted MST, the terms p ar ent , child , anc est o r , desc endant , sibling , le af all hav e their standard meaning . Let d deno te the maximum num ber of c hildren per no de in the r ooted MST. Note that in the Euclidea n plane, the ma xim um degree of an unro oted MST is at most 6. Mor e over, a no de can have degree equal to 6, only if it is surr ounded by six equidistant nodes forming a regular hexago n; we can exclude this degenera te case from co nsideration by a slig h t p erturbation of the input points. This leaves us with an unro oted MST of maximum degree 5. By c ho osing a node of degree less than 5 as the ro ot, we obta in a ro oted MST with d ≤ 4. The minimu m-weigh t double-tree shortcutting algo rithm of [Burk ard et al. 1998 ] applies to the g e neral Metric TSP , a nd runs in time O ( n 3 + 2 d n 2 ) a nd memory O (2 d n 2 ). In this pap er, we give an improv ed a lgorithm 1 for the case of small d , running in time O (4 d n 2 ) and memory O (4 d n ). In the planar Euclidean cas e, b oth ab o ve algorithms run in polynomia l time and memory . W e then describ e our implementation of the new algo rithm, which incor porates a couple of a ddit ional heuristic improvemen ts des ig ned to sp eed up the a lgorithm and to increase its approximation q ualit y . Computational exp erimen ts show that the approximation quality and running time of our implementation ar e among the bes t known tour-constructing heuristics. A preliminary v ersio n of this pa p er appea red as [Deineko and Tiskin 2007 ]. 2. THE ALGORITHM 2.1 Preliminaries Let G be a w eighted graph represe n ting the Metric TSP proble m on n p oint s. The double-tree metho d cons ists of the follo wing stages: —construct the minim um spanning tree of G ; —duplicate every edge of the tree, o btaining an n -no de Eulerian g raph; —select an Euler tour o f the double-tree graph; —reduce the Euler tour to a Hamiltonia n cy cle b y rep eated shortcutting , i.e. re- placing a no de se q uence a , b, c b y a, c , a s long as no de b a pp ears elsewhere in the current tour. W e sa y that a Hamiltonian cycle c onforms to the doubled spa nning tree, if it can be obtained from that tree by shortcutting one of its Euler tours. W e also extend this definition to paths, saying that a path conforms to the tree, if it is a subpath of a conforming Hamiltonia n cyc le . In our minimum-w eight double-tree shor tcutting algor ithm, we refine the bo ttom- up dynamic pro gramming approach of [Burk ar d et a l. 1998 ]. Initially , w e select a n arbitrar y no de r as the ro ot of the tree. F or a no de u , we denote by C ( u ) the set of all children of u , and by T ( u ) the no de set of the maximal subtree ro oted a t u , 1 Note that Burk ard et al. [Burk ard et al. 199 8] also gi v e an O (2 d n 3 ) algori t hm for a more gen- eral TSP-type problem, where the set of admissible tours is restricted b y a giv en PQ-tree. Our algorithm does not improv e on the algorithm of [Burk ard et al. 1998] for this more general problem. AC M Journal Name, V ol . V, No. N, Month 20YY. 4 · V. D ei neko and A. Tiskin i.e. the set of all descendants of u (including u itself ). F or a s et of sibling s U , w e denote by T ( U ) the (disjoint) union o f a ll subtrees T ( u ), u ∈ U . When U is empty , T ( U ) is a lso empty . The characteristic prop ert y of a c onforming Hamiltonian cycle is a s follo ws: for every no de u , the cycle must contain a ll no des of T ( u ) consecutively in some order. F or an arbitra ry no de set S , we will say that a path through the gr aph swe eps S , if it visits a ll no des of S consecutively in s ome o rder. In this terminology , a conforming Hamiltonian cycle m us t, for every no de u , contain a subpath sweeping the subtree T ( u ). In the r est o f this sec tion, we deno te the metric dis tance b et ween u and v by d ( u, v ). W e use the symbol ⊎ to deno te disjoint s et union. F or brevity , given a set A and an elemen t a , we wr ite A ⊎ a instead of A ⊎ { a } , and A \ a instead of A \ { a } . 2.2 Upsweep: Computing solution weight The algor ithm pro ceeds b y computing minimum-w eight sweeping paths in progr es- sively increasing subtrees, b eginning with the lea ves and finishing with the whole tree T ( r ). A similar approa ch is adopted in [Burk ard et al. 199 8], where in each subtree, all-pairs minimum-w eig h t sw eeping paths are computed. In cont ras t, our algorithm o nly computes single-sour ce minimum -weight sweeping pa ths orig inating at the s ubtree’s roo t. This leads to s ubstan tial sa vings in time and memory . A non-ro ot no de v ∈ C ( u ) is active , if its subtree T ( v ) has alr eady b een pro cessed, but its parent’s subtree T ( u ) has not yet b een pro cessed. In every sta ge o f the algorithm, we choose the curr ent n o de u , so that all children o f u (if any) are active. W e call T ( u ) the curr ent subtr e e . Let V ⊆ C ( u ), a ∈ T ( V ). W e de no te b y D u V ( a ) the weigh t o f the shortes t conforming pa th starting fr om u , sweeping the subtree u ⊎ T ( V ), and finishing at a . Consider the current subtree T ( u ). Pro cessing this subtree will yield the v alues D u V ( a ) for all V ⊆ C ( u ), a ∈ T ( V ). In order to pro cess the subtree, we need the corres p onding v a lues for all subtrees ro oted at the children of u . Mo re precisely , we need the v alues D v W ( a ) for every child v ∈ C ( u ), every subset W ⊆ C ( v ), and e v er y destination no de a ∈ T ( W ). W e do no t need any explicit information on subtrees ro oted a t grandchildren a nd lower descendants of u . Given the current subtree T ( u ), the v alues D u V ( a ) ar e co mput ed inductiv ely for all sets V o f c hildren of u . The induction is on the size of the set V . The base of the induction is tr iv ial: no v a lue s D u V ( a ) exist w he n V = ∅ . In the inductive step, given a set V ⊆ C ( u ), w e compute the v alues D u V ⊎ v ( a ) fo r all v ∈ C ( u ) \ V , a ∈ T ( v ), as follows. By the inductive h ypo thesis, we hav e the v alues D u V ( a ) for all a ∈ T ( V ). The main pa rt of the inductive step consists in computing a set of auxiliary v alues D u V ,W ( v ), for all subsets W ⊆ C ( v ). Every suc h v alue r epresen ts the weight of the shor test conforming path s tarting from no de u , sweeping the subtree u ⊎ T ( V ), then s w ee ping the subtree T ( W ) ⊎ v , and finishing at no de v . Supp ose the pa th exits the subtree u ⊎ T ( V ) a t node x and enters the subtree T ( W ) ⊎ v at no de y . W e hav e AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum-w eight double-tree sho rtcutting for Metric TSP · 5 u b T ( V ) b v b T ( W ) b b x b y Fig. 1: Computation of D u V ,W ( v ) u b T ( V ) b v b T ( v ) b a (a) Case W = ∅ u b T ( V ) b v b b T ( v ) b a (b) Case W 6 = ∅ Fig. 2: Computation of D u V ⊎ v ( a ), a ∈ T ( v ) D u V ,W ( v ) = d ( u, v ) if V = ∅ , W = ∅ min y ∈ T ( W ) d ( u, y ) + D v W ( y ) if V = ∅ , W 6 = ∅ min x ∈ T ( V ) D u V ( x ) + d ( x, v ) if V 6 = ∅ , W = ∅ min x ∈ T ( V ); y ∈ T ( W ) D u V ( x ) + d ( x, y ) + D v W ( y ) if V 6 = ∅ , W 6 = ∅ (1) (see Figur e 1). The r equired v alues D v W ( y ) hav e b een obtained pre v iously , while pro cessing s ubtr ees T ( v ) for the active no des v ∈ C ( u ). Note that the co mput ed auxiliary v alues include D u V ⊎ v ( v ) = D u V ,C ( v ) ( v ). Now we can c o mpute the v a lues D u V ⊎ v ( a ) for a ll a ∈ T ( v ) \ v = T ( C ( v )). A pa th corres p onding to D u V ⊎ v ( a ) must sweep u ⊎ T ( V ), and then T ( v ), finishing at a . While in T ( v ), the path will first sweep a (p ossibly sing le-node) subtree v ⊎ T ( W ), finishing a t v . Then, star ting at v , the path will sweep the subtree v ⊎ T ( W ), where W = C ( v ) \ W , finishing at a . Co nsidering ev ery p ossible disjoint bipartitioning W ⊎ W = C ( v ), such that a ∈ T ( W ), we have D u V ⊎ v ( a ) = min W ⊎ W = C ( v ): a ∈ T ( W ) D u V ,W ( v ) + D v W ( a ) (2) (see Figure 2). W e now hav e the v alues D u V ⊎ v ( a ) for all a ∈ T ( v ). The computation (1)–(2) is rep eated for every node v ∈ C ( u ) \ V . The inductiv e step is no w completed. The pro cessing of subtree T ( u ) ter minates when all po ssible choices o f subset V and node v hav e b een exhausted. Even tually , the ro ot r of the tree be c omes the cur ren t node, and we pro cess the complete tree T ( r ). This establishes the v a lues D r S ( a ) for a ll S ⊆ C ( r ), a ∈ T ( S ), which inc ludes the v a lues D r C ( r ) ( a ) for a ll a 6 = r . The weigh t of the minimum-w eight AC M Journal Name, V ol . V, No. N, Month 20YY. 6 · V. D ei neko and A. Tiskin u b b T ( V n v 1 ) v 1 b b T ( C ( v 1 ) n v 2 ) v 2 b b T ( C ( v 2 ) n a ) a b T ( a ) Fig. 3: Computation of P u V ( a ), a ∈ T ( V ), k = 3 conforming Hamiltonian cycle can now be determined as min a 6 = r D r C ( r ) ( a ) + d ( a, r ) (3) Theorem 2.1. The u pswe ep algorithm c omputes the weigh t of the minimum- weight t r e e shortcutt i ng in time O (4 d n 2 ) and sp ac e O (2 d n ) . Proof. In computation (1), the total n umber of quadruples u, v , x, y is a t most n 2 (since for every pa ir x , y , the node u is determined uniquely as the lo west common a ncestor of x , y , and the no de v is determined uniq ue ly as a child of u and an ancestor of y ). In computation (2) , the to ta l num b er of triples u, v , a is also at most n 2 (since for every pa ir u , a , the no de v is determined uniquely as a child of u and an ancestor of y ). F o r every suc h quadruple or triple, the computation is per formed at most 4 d times, corresp onding to 2 d po ssible choices of each of V , W . The co st of computation (3) is negligible. Ther e fo re, the total time complexity of the algorithm is O (4 d n 2 ). Since our goal at this s tage is just to compute the solution weigh t, at any g iv en moment we o nly need to store the v alue s D u V ( a ), where u is either an activ e no de, or the current no de (i.e. the no de for which these v a lues are currently b eing computed). When u corr esponds to an active no de, the n umber of p ossible pairs u, a is at mo s t n (since node u is determined uniquely as the r oot of the active subtree con taining a ). When u corresp onds to the current no de, the num b er o f p ossible pairs u , a is also at most n (since node u is fixed). F o r every suc h pair, we need to keep at mos t 2 d v alues, corr esponding to 2 d po ssible choices of V . The rema ining space costs are negligible. Therefo r e, the total space complexit y of the a lgorithm is O (2 d n ). 2.3 Downsw eep: R econstructing full solutio n In order to reco ns truct the minim um- w eig h t Hamiltonian cycle itself, we must keep all the auxilia ry v a lues D u V ,W ( v ) obtained in the course of the upsweep computation for every parent-c hild pair u , v . W e solve recursively the following problem: given a no de u , a set V ⊆ C ( u ), a nd a no de a ∈ T ( V ), find the minimum-w eight path P u V ( a ) s tarting from u , sweeping subtree u ⊎ T ( V ), and finishing a t a . T o compute the glo bal minimum-w eight Hamiltonia n c ycle, it is sufficient to determine the path P r C ( r ) ( a ), whe r e r is the root of the tree, and a is the no de for whic h the minimum in (3) is a tt ained. F or any u , V ⊆ C ( u ), a ∈ T ( V ), consider the (not necessar ily confor ming o r minim um-weigh t) path u = v 0 → v 1 → v 2 → · · · → v k = a , joining no des u a nd AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum-w eight double-tree sho rtcutting for Metric TSP · 7 a in the tree (see Figure 3). T he conforming minim um-weigh t path P u V ( a ) first sweeps the subtree u ⊎ T ( V \ v 1 ). After that, for every no de v i , 0 < i < k , the path P u V ( a ) sweeps the subtree v i ⊎ T ( C ( v i ) \ v i +1 ) as follows: first, it sweeps a subtree v i ⊎ T ( W i ), finishing at v i , and then, starting at v i , it sweeps the subtree v i ⊎ T ( W i ), for some disjoint bipa rtitioning W i ⊎ W i = C ( v i ) \ v i +1 . Fina lly , the path P u V ( a ) sw eeps the subtree T ( a ), finishing at a . The optimal choice of bipar titionings can b e found as follows. W e co nstruct a weigh ted directed layer e d gr aph with a source vertex co rrespo nding to no de u = v 0 , a s ink vertex co rrespo nding to node v k = a , a nd k − 1 intermediate layers of vertices, each lay er corresp onding to a no de v i , 0 < i < k . Each intermediate layer consists of at most 2 d − 1 vertices, repre sen ting all different disjoint bipa rtitionings of the no de s et C ( v i ) \ v i +1 . T he source and the sink v ertices represent the trivia l bipartitionings ∅ ⊎ ( V \ v 1 ) = V \ v 1 and C ( a ) ⊎ ∅ = C ( a ), resp ectiv ely . E v e r y consecutive pair of vertex lay ers (including the s ource a nd the sink vertices) ar e fully connected by forward arcs. In particula r, the a rc from a vertex repres e nting the bipartitioning X ⊎ X in layer i , to the vertex represe n ting the bipa rtitioning Y ⊎ Y in lay er i + 1, is g iv en the weight D v i X ,Y ( v i +1 ). It is e a sy to see that an optimal choice of bipartitioning co rrespo nds to the minim um-weigh t path from the sour ce to the sink in the lay ered gra ph. This minimum-w eight path can b e found by a standard dyna mic programming alg orithm (suc h as the Bellma n– F ord algor ithm, see e.g . [Co r men et al. 2001 ]) in time prop ortional to the num ber of arcs in the lay ered g raph. Let W 1 ⊎ W 1 , . . . , W k − 1 ⊎ W k − 1 now denote the k − 1 obtained o ptima l subtree bipartitionings. The k arcs of the corr esponding sourc e -to-sink sho r test path deter - mine k edges (not necessarily consecutive) in the minim um-weigh t sw eeping path P u V ( a ). Thes e edges ar e shown in Figure 3 b y dotted lines. It now remains to apply the downsweep algorithm rec ur siv ely in each of the s ubtr ees u ⊎ T ( V \ v 1 ), v 1 ⊎ T ( W 1 ), v 1 ⊎ T ( W 1 ), v 2 ⊎ T ( W 2 ), v 2 ⊎ T ( W 2 ), . . . , v k − 1 ⊎ T ( W k − 1 ), v k − 1 ⊎ T ( W k − 1 ), T ( a ). Theorem 2.2. Given the output and the ne c essary interme diate values of the upswe ep algorithm, the downswe ep algorithm c omputes the e dges of the minimum- weight t r e e shortcutt i ng in time and sp ac e O (4 d n ) . Proof. The c o nstruction of the layered gr aph and the minim um-weigh t pa th computation runs in time O (4 d k ), wher e k is the num ber of edges in the tree path u = v 0 → v 1 → v 2 → · · · → v k = a in the c urren t level of re c ursion. Since the tree paths in differe n t r ecursion lev els are edge-dis j oint, the total num b er of edg es in thes e paths is at most n . Therefore, the time c o mplexit y of the downsw eep algorithm is O (4 d n ). By Theorem 2.1, the space complexity o f the upsweep a lgorithm is O (2 d n ). In addition to the storag e used internally by the upsweep algorithm, we also need to keep a ll the v a lues D u V ,W ( v ). The num ber of possible pairs u, v is at most n (since no de u is determined uniquely a s the par e nt of v ). F or ev ery such pair, w e nee d to keep at most 4 d v alues, corres ponding to 2 d po ssible choices o f each of V , W . The remaining space costs ar e negligible. Therefore, the total s pace complexity of the downsw eep alg orithm is O (4 d n ). AC M Journal Name, V ol . V, No. N, Month 20YY. 8 · V. D ei neko and A. Tiskin 3. HEURISTIC IMPRO VEMEN TS Despite the gua ran teed approximation ratio of the do uble-tree shortcutting and Christofides metho ds, neither has p erformed well in pr e vious computationa l exp eri- men ts (see [Johns o n and McGeo ch 1997; Reinelt 1994]). How ever, to our knowledge, none of these exper imen ts explor ed the minimum -weigh t double-tree shortcutting approach. Instead, the double-tree s hortcutting was p erformed in some sub opti- mal, easily computable order, such as a depth-first tree traversal. W e sha ll call this metho d depth-first double-tr e e shortcut t ing . In particular , [Reinelt 1994] compares 37 tour-constructing heuristics, including the depth-first double-tree algorithm a nd the Christofides a lg orithm, on a set of 24 g e o metric instances from the TSPLIB da tabase [Reinelt 1 991]. Although most instances in this exp erimen t are quite small (2 0 00 or few er points), they still allow us to ma ke some qua lita tiv e judgement ab out the a ppro ximation quality of different heuristics. Depth-first do uble-tree s hortcutting tur ns out to hav e the lo west quality of all 37 heuristics, while the qua lit y of the Christofides algorithm is somewha t higher, but still far fro m the top. Int uitively , it is clear that the r eason for the po or approximation qualit y of the t wo algor ithm s may b e in the wr ong choice of the shor tcutt ing order , esp ecially co n- sidering that the ov erall nu mber of alternative choices is t ypically exp onen tial. This observ a tion motiv ated us to implement the minimum-w eight double-tree shortcut- ting a lgorithm from [Burk a rd et al. 199 8]. It ca me as no sur prise that this alg orithm show ed higher approximation qua lit y than all the tour constructing he ur istics in Reinelt’s exp erimen t. Unfortunately , Reinelt’s exper iment did not a c coun t for the running time of the alg orithms under investigation. The theoretica l time com- plexity o f the previous minimum-w eight double-tr e e algo rithm from [Burk a rd et a l. 1998] is O ( n 3 + 2 d n 2 ); in practice , o ur implementation of this algorithm exhibited quadratic growth in running time on mos t instances. Both the theoretica l and the practical running times were relatively high, which raised some justifiable doubts ab out the overall super iorit y o f the metho d. As it was exp ected, the intro duction of the new efficie n t minimum-w eight double- tree algo rithm describ ed in Section 2 significa n tly improved the running time in o ur computational exp erimen ts. How ever, this impr ovemen t a lone was not sufficient for the algo rithm to comp ete against the be st existing tour-constructing heuristics. Therefore, we int ro duced tw o a dditional heuristic improvemen ts, one aimed at in- creasing the algorithm’s speed, the other at impro ving its approximation quality . The first heuristic, aimed at sp eeding up the algo rithm, is sug gested by the well- known bo unded neig h b our lists [Johnso n a nd McGeo c h 2002, p. 408]. Given a tree, we define the tr e e distanc e betw een a pair of no des a , b , as the num b er of edges on the unique path from a to b in the tr ee. Giv en a para meter k , the depth- k list of no de u includes all no des in the subtree T ( u ) with the tree distance from u not exceeding k . The s uggested heuristic improv ement is to limit the sear ch across a s ubtree ro oted at u in (1 )–(2) to a depth- k list of u for a s uitably c hosen v alue of k . Our exp eriments suggest that this approach improves the running time dramatically , without a sig nifica n t negative effect on the approximation quality . The second heuristic, aimed at improving the algorithm’s approximation quality , works b y expanding the spa ce of the tours searched, in the hop e of finding a b etter AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum-w eight double-tree sho rtcutting for Metric TSP · 9 solution in the lar ger s pace. L e t T b e a (not necessarily minimum) spanning tree, and let Λ( T ) be the set of all tours conforming to T , i.e. the exp onen tial set of all tours considered by the double-tree algorithm. Our goal is to construct a new tree T 1 , such that its no de degrees are still b ounded b y a co nstan t, but Λ( T ) ( Λ( T 1 ). W e refer to the new set of tours as an en lar ge d tour neighb ou r ho o d . Consider a no de u in T , and s uppose u has at lea s t o ne child v which is not a leaf. W e co nstruct a new tree T 1 from T by a pplying the de gr e e-incr e asing op er ation , which makes node v a leaf, and r edefines a ll children of v to b e children of u . It is easy to c heck that any tour conforming to T als o conforms to T 1 . In particular, the no des of T ( v ), whic h are consecutive in any conforming tour of T , are still allow ed to be consecutive in any conforming tour of T 1 . Ther e f ore , Λ( T ) ⊆ Λ( T 1 ). On the other hand, s equence w , u, v , where w is a c hild of v , is allow ed b y T 1 but not by T . Therefore, Λ( T ) ( Λ( T 1 ). Note that the deg r ee-increasing op eration cannot b e p erformed pa rtially: it would be wr ong to reassign only s ome, instead of all, c hildren of no de v to a new parent. T o illustrate this statemen t, supp ose that v has tw o children w 1 and w 2 , whic h are bo th leaves. Let w 2 be redefined a s a new child o f u . The sequence v , w 2 , w 1 is allow ed b y T but not by T 1 , since it v iolates the requir emen t for v a nd w 2 to be consecutive. There fo re, Λ( T ) 6⊆ Λ( T 1 ). W e apply the degree-increas ing heuristic as follows. Let D be a g lobal parame- ter, not necessarily related to the maximum no de degree in the original tree. The degree-incr easing op eration is per formed only if the resulting new degree of vertex u w ould not ex c eed D . Given a tree, the deg ree increasing op eration is applied re- pea tedly to construct a new tree, obtaining a n enlarg ed tour neighbourho od. In our exp erimen ts, we used brea dth -firs t applicatio n o f the degr ee increasing op eration as follows: Ro ot the minimum s panning tree at a node of degree 1; Let r ′ denote the unique child of the ro ot; Insert all c hildren of r ′ int o queue Q ; while queue Q is not empty do extract no de v from Q ; insert all c hildren of v into Q ; if deg( p ar ent ( v )) + deg ( v ) ≤ D then redefine all c hildren of v to b e c hildren of p ar ent ( v ) T o incor porate the des cribed heuristics , the minimu m-weigh t do uble-tree alg o- rithm from Section 2 was mo dified to take tw o parameters: the search depth k , a nd the degree limit D . W e refer to the double-tree algorithm with fixed para meters k and D as a double-tr e e heuristic DT D,k . W e use DT without s ubs cripts to denote the original minim um-weigh t double-tree algor ithm, equiv alent to DT 1 , ∞ . 4. COMPUT A T IONAL EXPERIME NTS W e compared ex perimentally the efficiency of the orig inal algorithm DT with the efficiency o f double-tr e e heuristics DT D,k for tw o different sear ch depths k = 16 , 32, and for four different v alues for the degree limit D = 1 (no degree incr easing op eration a pplied), 3, 4, 5. The c ase D = 2 is essentially equiv a len t to D = 1, and therefore not considered. AC M Journal Name, V ol . V, No. N, Month 20YY. 10 · V. Deineko and A. Ti skin Size 1000 3162 10K 31K 100K 316K 1M 3M DT 7.36 7.82 8.01 8.19 8.39 8.40 8.41 – DT 1 , 16 8.64 9.24 9.10 9.43 9.74 9.66 9.72 9.66 DT 3 , 16 6.64 6.97 7.04 7.37 7.51 7.53 7.55 7.50 DT 3 , 32 6.52 6.84 6.92 7.21 7.31 7.36 7.37 7.31 DT 4 , 16 6.00 6.27 6.39 6.69 6.82 6.87 6.85 – DT 4 , 32 5.93 6.22 6.33 6.60 6.74 6.78 6.77 – DT 5 , 16 5.67 5.91 5.97 6.27 6.43 6.51 6.47 – DT 5 , 32 5.62 5.89 5.93 6.23 6.38 6.46 6.43 – (a) Av erage excess ov er the Held–Karp bound (%) Size 1000 3162 10K 31K 100K 316K 1M 3M DT 0.18 1.56 15.85 294.38 3533 51147 1566 59 – DT 1 , 16 0.04 0.14 0.47 1.57 5.60 20.82 101.09 388.52 DT 3 , 16 0.10 0.33 1.12 3.55 11.90 40.91 138.41 491.58 DT 3 , 32 0.18 0.69 2.45 7.56 25.46 82.99 269.73 935.55 DT 4 , 16 0.23 0.84 2.78 8.81 29.02 94.36 307.31 – DT 4 , 32 0.45 2.00 6.93 22.11 74.70 236.33 744.50 – DT 5 , 16 0.62 2.30 7.79 24.48 81.35 253.59 807.74 – DT 5 , 32 1.11 5.74 20.73 65.96 224.34 695.03 2168.95 – (b) Average normalised running time (s) T able I: Results for DT and DT D ,k on unif orm Euclidean distance s The DIMACS Implemen tation Cha lle ng e [Johnson and McGeo c h 2002 ] provided an exce llen t opp ortunit y for testing and ev alua ting new approa c hes to the TSP. W ebsite [DIMA CS], created to supp ort the Challenge, contains a w ide range of test instances and exp erimen tal data. In our computational exp erimen ts, we used uni- form random Euclidean insta nces with 1000 points (10 instances ), 3 1 62 po in ts (five instances), 10000 points (three instances), 31623 and 10 0 000 p oin ts (tw o instances of each size), 31622 8, 1000000 , and 316 8278 points (one instance of each size). F or each heuristic, we consider both its approximation qualit y and r unning time. W e say that one heuristic dominates another , if it is super io r in b oth these resp ects. F ollowing the appro ac h of the DIMACS Challenge, a ppro ximation quality is mea- sured in terms of the approximate solution’s exces s ov er the Held– Karp b ound (the solutio n to the standard linear pro g ramming r elaxation of the TSP), and the running time in ter ms of the “normalised co mputation time” (see [Johnson and Mc- Geo c h 2002 ], [DIMACS] for details). The exp erimental r esults, presented in T able I, clearly indicate that nearly all considered heuristics 2 (excluding DT 1 , 16 ) dominate plain DT. Moreov er, all these heuris tics (a gain excluding DT 1 , 16 ) do minate DT o n each individual instance used in the ex periment. F or further co mparison of the double-tree heuristics with exis ting to ur-constructing heuristics, w e c hose DT 1 , 16 and DT 5 , 16 . The main part of our computational exp erimen ts consisted in comparing the double-tree heuristics a g ainst the mo s t p o werful existing tour-constructing heuris- tics. As a bas e fo r compa rison, w e chose the heur istics a na lysed in [J ohnson a nd 2 Heuristic DT 1 , 32 is omitted f rom T able I, si nc e i t does not give an y notice ably better results compared to DT 1 , 16 . AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum- w eight double-tree sho rtcutting fo r Metric TSP · 11 Size 1000 3162 10K 31K 100K 316K 1M 3M RA + 13.96 15.25 15.04 15.49 15.43 15.42 15 .48 15.47 Chr-S 14.48 14.61 14.81 14.67 1 4.70 14.49 14.59 14.51 FI 12.54 12.47 13.35 13.44 13.39 13.43 13 .47 13.49 Sa v 11.38 11.78 11.82 12.09 12.14 12.14 12 .14 12.10 ACh 11.13 11.00 11.05 11.39 11.24 11.19 11 .18 11.11 Chr-G 9.80 9.79 9.81 9.95 9.85 9.80 9.79 9.75 Chr-HK 7.55 7.33 7.30 6.74 6.86 6.90 6.79 – MTS1 6.09 8.09 6.23 6.33 6.22 6.20 – – MTS3 5.26 5.80 5.55 5.69 5.60 5.60 – – DT 1 , 16 8.64 9.24 9.10 9.43 9.74 9.66 9.72 9.66 DT 5 , 16 5.67 5.91 5.97 6.27 6.43 6.51 6.47 – (a) Av erage excess ov er the Held–Karp bound (%) Size 1000 3162 10K 31K 100K 316K 1M 3M RA + 0.06 0.23 0.71 1. 9 5.7 13 60 222 Chr-S 0.06 0.26 1.00 4. 8 21.3 99 469 3636 FI 0.19 0.76 2.62 9. 3 27.7 65 316 1301 Sa v 0.02 0.08 0.26 0. 8 3.1 21 100 386 ACh 0.03 0.12 0.44 1. 3 3.8 28 134 477 Chr-G 0.06 0.27 1.04 5.1 21.3 121 423 3326 Chr-HK 1.00 3.96 14.73 51.4 247.2 971 3060 – MTS1 0.37 2.56 17.21 213.4 124 8 11834 – – MTS3 0.46 3.55 24.65 989.1 206 3 21716 – – DT 1 , 16 0.04 0.14 0.47 1.57 5.60 20.82 101 389 DT 5 , 16 0.62 2.30 7.78 24.48 81.35 254 808 – (b) Average normalised running time (s) T able II: Comparison betw een established heuri s t ics and DT-heuristics on uniform Euclidean instances 0 2 4 6 8 10 12 14 16 5 6 7 8 9 10 11 12 13 14 15 Av erage normalised running time (s) Av erage exess o v er the Held-Karp b ound (%) b DT 1 ; 16 b Chr-G b A h b Sa v b FI b Chr-S b RA + b Chr-HK b DT 5 ; 16 b DT 3 ; 16 Fig. 4: Comparis on bet ween established heuristics and DT-heuristics on uniform Euclidean in- stances with 10000 poi n ts AC M Journal Name, V ol . V, No. N, Month 20YY. 12 · V. Deineko and A. Ti skin McGeo c h 2002 ], a s w ell as t wo recent matc hing-based heuris tics from [Ka hng a nd Reda 2004]. The exp erimen ts were p erformed on a Sun Sys tems Enterprise Serv er E450, under SunOS 5.8, using the gcc 3.4.2 compiler. T able I I shows the results of these exper imen ts. Abbreviatio ns in the table follow [Johnson and McGeoch 2 002; Ka hng and Reda 2004]: —RA + : Bentley’s r andom augmented addition heuris tic; —Chr-S: the Christofides heuristic with sta ndard shortcut, implemen ted by J ohn- son and McGeoch (JM); —FI: Ben tley’s farthest insertion heuristic; —Sav: saving heuris tic, implemented b y JM; —A Ch: a ppro ximate C hr istofides heur is tic, implemented by JM; —Chr-G: the Christofides heuristic with gr eedy shor tcut , implemen ted by JM; —Chr-HK: the Chris tofides heuristic on Held–Kar p trees instead of MST, imple- men ted by Rohe; —MTS1, MTS3: “match twice and stitc h” heuristics, implemented b y Kahng and Reda. As se e n from the table, the a verage approximation quality of DT 1 , 16 turns out to be higher than all class ical heuristics considered in [Johns o n and McGeo c h 2002], except Chr-HK. Moreov er, heur istic DT 1 , 16 dominates heuristics RA + , Chr-S, FI, Chr-G. Heuristic DT 5 , 16 dominates Chr-HK . Heuristic DT 5 , 16 also compares very fa vourably with MTS heuristics, providing s imilar approximation quality at a small fraction of the r unnin g time. The a bov e r esults sho w clearly that double-tr ee heuristics deser v e a pr ominen t place a mong the b est tour-co nstructing heuristics for Euclidean TSP . The impres s iv e succes s of double-tr ee heuristics must, howev er, b e approached with some caution. Although the nor malised time is an excellent to ol for c o mparing results rep orted in different computational exp erimen ts, it is only an approximate estimate of the exact running time. According to [Johnson a nd McGeo c h 2002 , page 377 ], “ [th is] estimate is still typically within a fac tor of tw o of the c o rrect time”. There f ore , as an a lternativ e wa y o f repre sen ting the results of computational exp erimen ts, we sugges t a gra ph o f the type shown in Fig ur e 4, which compar es the heuristics’ average approximation qua lit y and r unning time on rando m unifor m instances with 1 0000 p oin ts. A normalised time t is represented by the int erv al [ t/ 2 , 2 t ]. The relative po sition o f heuristics in the comparison and the dominance relationships can b e seen clear ly fro m the g raph. Res ults for other instance sizes and t ype s a re gener ally similar. Additional exp erimen tal r esults for c lustered Euclidea n instances a re shown in T able II I (with DT 1 , 16 replaced by DT 4 , 16 to illustra te mor e clea rly the ov erall adv antage o f DT-heuris tics), and for TSPLIB instances in T able IV. While w e hav e done our b est to compare the existing and the prop osed heuristics fairly , we r ecognise tha t our exp erimen ts are not, strictly sp eaking, a “blind test”: we had the results o f [Jo hnson and McGeo c h 2 002] in a dv ance of implementing our metho d, and in particula r of selecting the top DT-heuris tics for comparis on. How ever, we never co nsciously adapted o ur choices to the previo us knowledge of AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum- w eight double-tree sho rtcutting fo r Metric TSP · 13 Size 1000 3 162 10K 31K 100K 316K RA + 12.84 13.88 16.08 15.59 16.22 16.33 Chr-S 12.03 12.79 13 .08 13.47 13.50 13.45 FI 9.90 11.85 12.82 13.37 13.96 13 .92 Sa v 13.51 15.97 17.21 17 .93 18.20 18.50 ACh 10.21 11.01 11.47 11 .78 12.00 11.81 Chr-G 8.08 9.01 9.21 9.47 9.55 9.55 Chr-HK 7.27 7. 78 8.37 8. 4 2 8.46 8.56 MTS1 8.90 9.96 11.97 11.61 9.45 – MTS3 8.52 9.5 10.11 9.72 9.46 – DT 4 , 16 6.37 8.24 8.79 9.40 9.38 9.39 DT 5 , 16 5.72 7.17 7.92 8.32 8.46 8.42 (a) Av erage excess ov er the Held–Karp bound (%) Size 1000 3162 10K 31K 100K 316K RA + 0.1 0.2 0.7 1.9 5.5 12.7 Chr-S 0.2 0.8 3.2 11.0 37.8 152.8 FI 0.2 0.8 2.9 9.9 30.2 70.6 Sa v 0.0 0.1 0.3 0.9 3.4 22.8 ACh 0.0 0.2 0.8 2.1 6.4 54.2 Chr-G 0.2 0.8 3.2 11.0 37.8 152.2 Chr-HK 0.9 3.3 11.6 40.9 197.0 715.1 MTS1 0.78 4.19 45.09 276 1798 – MTS3 0.84 4.76 49.04 337 2213 – DT 4 , 16 0.2 0.87 3.16 9.55 34.43 120.3 DT 5 , 16 1.12 4.85 16.08 53.35 174 569 (b) Average normalised running time (s) T able II I: Comparison b et ween esta blished heuristics and DT-heuristics on clustered Euclidean instances [Johnson and McGeo ch 2002], and w e believe that any sub conscious effect of this previous kno wledge on our experimental setup is negligible . 5. CONCLUSIONS AND OPE N PR OB LEMS In this pap er, w e hav e presented a n improved algo rithm for finding the minim um- weigh t double-tr e e shortcutting approximation for Metric TSP . W e challenged our- selves to make the algor ithm a s e fficie nt as po ssible. The improv ement in time complexity fr om O ( n 3 + 2 d n 2 ) to O (4 d n 2 ) (which implies O ( n 2 ) for the Euclidean TSP) placed the minimum-w e ig h t double-tre e shortcutting method as a pee r in the set of the most powerful tour-cons tructing heuristics. It is kno wn that most such heuristics have theo retical time complexity O ( n 2 ), and in practice o ften exhibit near-linear running time. The minimum -weigh t double-tre e metho d now als o fits this pattern. While we have not b een using the languag e o f para meter ised co mplexit y [Downey and F ellows 1998 ], w e (and the prev ious work [Burk ar d et al. 1998 ]) hav e in fact demonstrated that the problem of finding the minimu m-weigh t double-tree tour for Metric TSP is fixed-par ameter tra ctable (where the maxim um degree o f the MST is the relev a n t para meter). It would b e interesting to see if this connection with AC M Journal Name, V ol . V, No. N, Month 20YY. 14 · V. Deineko and A. Ti skin Size 1000 3162 10K 31K 100K RA + 17.46 16.28 17.78 19.88 17.39 Chr-S 13.36 14.17 13 .41 16.50 15.46 FI 15.59 14.28 13.20 17.78 15.32 Sa v 11.96 12.14 10.85 10.87 19.96 ACh 9.64 10.50 10.22 11.83 11.52 Chr-G 8.72 9.41 8.86 9.62 9.50 Chr-HK 7.38 7. 12 7.50 6. 9 0 7.42 MTS1 7.0 6.9 5.1 4.7 4. 1 MTS3 6.2 5.1 4.0 2.9 2. 7 DT 1 , 16 6.36 5.99 8.09 9.99 10.02 DT 5 , 16 6.13 5.58 7.65 8.98 9.30 (a) Av erage excess ov er the Held–Karp bound (%) Size 1000 3162 10K 31K 100K RA + 0.1 0.2 0.8 2.2 5.6 Chr-S 0.1 0.2 1.8 3.9 31.8 FI 0.2 0.8 3.1 9.8 26.4 Sa v 0.0 0.1 0.3 0.6 1.4 ACh 0.0 0.1 0.5 1.5 3. 9 Chr-G 0.1 0.2 1.8 3.8 29.5 Chr-HK 0.7 2.2 9.7 50.1 177.9 MTS1 – 1.5 34.4 107.3 620.0 MTS3 – 2.1 42.4 135.4 1045.3 DT 1 , 16 0.3 0.9 4.1 18.4 49.3 DT 5 , 16 0.6 2.1 11.0 57.1 115.1 (b) Average normalised running time (s) T able IV: Comparison bet ween esta blished heuristics and DT-heuristics on geometric instances from TSPLIB: pr1002, p cb11 73, rl1304, nrw1379 (size 1000), pr2392, p cb303 8, f nl1446 1 (size 3162), pla7397, brd14051 (size 10K), pla33810 (size 31K), pla859000 (size 100K). parameteris ed complexity theory can be extended further, e.g. by using a n y of the established tec hniques for designing fixed-parameter tractable algorithms. Our results should be regarded only as a first step in exploring new opp ortunities. Particularly , the minim um spanning tree is not the only p ossible choice of the initial tree. Instea d, one can c ho ose from a v ariety of trees, e.g. Held and K arp (1-)tr ees, approximations to Steiner trees, spanning trees of Delaunay gr aphs, etc. This v ariety of choices merits a further detailed exploration. It is well-kno wn that when the initial tree is a pa th, the resulting double-tr ee tour neighbor hoo d is the set of all pyr amidal tours [Burk ard et al. 19 98]. In this case, a do zen of c onditions on the dis ta nce matrix are known (see e.g. [Burk ard et al. 1998]), which guarantee that the to ur neighbo urhoo d con tains the absolute minim um-weigh t tour . It may b e p ossible to genera lise this a pproach b y identi- fying new sp ecial types of trees and conditions on the distance matrices, whic h would g uaran tee that the minim um-weight do uble-tree algorithm finds a n absolute minim um-weigh t tour. F o r more results on p olynomial solv a bilit y of TSP with sp e- cial conditions imp osed on the distance matrix, see [Burk ard et al. 19 9 8; Deineko et al. 2006]. AC M Journal Name, V ol . V, No. N, Month 20YY. Fas t minimum- w eight double-tree sho rtcutting fo r Metric TSP · 15 The minimum-w eight sho rtcutting pr oblem for the Christofides gr aph remains NP-hard even in the plana r E uclidean metric. How ever, our alg orithm turns out to be applica ble als o to this problem on c e rtain c lasses of ins tances. It ca n b e shown that if the Christofides graph is a c actus (i.e. all its cycles are pa irwise edg e- disjoint) , then the s et o f a ll its shor tcuttin gs is a subset of the set of all double-tree shortcuttings. There f ore , our algorithm, as well as the algorithm of [Burk ard et al. 1998], can b e used to find efficiently the minimum-w eight shortcutting when the Christofides graph is a cactus. In particular, such a shortcutting can be found in po lynomial time in the planar Euclidean metric. Our effor ts inv e s ted into theor e tica l improvemen ts o f the alg orithm, supp orted by a couple of additional heuristic impro vemen ts, ha ve b orne the fruit: computationa l exp erimen ts with the minimum -weigh t double-tree algo r ithm show that it becomes one of the best known tour constr uc ting heuris tics. It app ears that the do uble-tree metho d is also well suited fo r lo cal s earc h improvemen ts based of transfor ma tions o f trees and searching the corres p onding tour neighbor hoo ds. One can easily imagine v ario us tree transforma tion techniques that could make our metho d ev en more powerful. 6. A CKNOWLEDGEMENTS The authors thank an anonymous referee of a previous version of this pap er, whose detailed comments help e d to impro ve it significantly . The MST subr o utine in our co de is courtes y of the Concorde pr o ject [Co ncorde]. REFERENCES Concorde TSP solver. http:/ /www.tsp.gat ech.edu/concorde . DIMACS TSP c hallenge. http://www .research.at t.com/ ~ dsj/chts p . Arora, S. 1998. Polynomial-time approximation sc hemes for Eucli de an TSP and other geometric problems. Journal of the ACM 45 , 753–782. Burkard, R. E. , Deineko, V. G. , v an D al, R. , v an d er Veen, J. A. A. , a nd W oeginger, G. J. 1998. W ell -solv able sp ecial cases of the tra veling salesman problem: A surv ey . SIAM R evi ew 40, 3 (Septem b er), 496–5 46. Burkard, R. E. , Deinek o, V. G. , and Woeginger, G. J . 1998. The tra velling salesman and the PQ-tree. Mathematics of Op er ations R ese ar ch 23, 3 (August), 613–623. Christofides, N. 1976. W orst-case analysis of a new heuristic for the tra velling salesman problem. T ech. r e p., Carnegie-Mellon Uni v ersi t y . Cormen, T. H. , Leiserson, C. E. , Rivest, R. L. , and Stein, C. 2001. Intr o duction to Algorithms , Second ed. The MIT Electrical Engineering and Computer Science Series. The MIT Press and McGraw– Hill . Deineko, V. , Klinz, B. , and Woeginger, G. 2006. F our p oi n t conditions and exp onen tial neigh b orhoods for the Symmetric TSP. In Pr o c e e dings of the 17 th ACM–SIAM SOD A . 544– 553. Deineko, V. and Tiskin, A. 2007. F ast minimum-weigh t double-tree shortcutting for M e tric TSP. In Pr o ce ed ings of the 6th WEA . Lecture N ot es in Computer Science , v ol. 4525. 136–149. Downey, R. G. and Fellows , M. R. 1998. Par ameterize d Complexity . Monographs in Computer Science. Springer. Johnson, D. S. and McGeoch, L. A. 1997. The tra v eling salesman problem: A case study in lo cal optimization. In L o c al Se ar ch i n Combinatorial Optimisation , G. Aarts and J. K. Lenstra, Eds. John Wiley & Sons, Chapter 8, 215–310. AC M Journal Name, V ol . V, No. N, Month 20YY. 16 · V. Deineko and A. Ti skin Johnson, D. S . and McGeoch, L. A. 2002. Experimental analysis of heuristics f or the STSP. In The T r aveling Salesman Pr oblem and Its V ariations , G. Gutin and A. P . Punnen, Eds. Kluw er Academic Publi shers, Chapter 9, 369–487. Kahng, A. B. and Reda, S. 2004. Match twice and stitc h: A new TSP tour construction heuristic. Op er ations R ese ar ch L ett ers 32 , 499–509. P ap adimitriou, C. H. 1977. The Euclidean trav eling salesman problem is NP-complete. The o- r eti c al Computer Sc ienc e 4 , 237–247. P ap adimitriou, C. H. and V azirani, U. V. 1984. On t wo geome tric problems related to the tra velling salesman problem. Journal of A lgorithms 5 , 231–2 46. Reinel t, G. 1991. TSPLIB — a trav eling salesman problem librar y . ORSA Journa l on Comput- ing 3, 4, 376–384. Reinel t, G. 1994 . The T r avel ling Salesman: Compu tational Solutions for TSP Applic ations . Springer-V erlag. R osenkrantz, D. J. , Stearns, R. E. , a nd Lewis I I, P. M. 1977. A n analysis of several heuris t ics for the trav eling sal esman problem. SIAM Journal of Comp uting 6 , 563–581. Serdyuko v, A. 1978. On some extremal walks in graphs. Upr avlyaemye systemy 17 , 76–7 9. AC M Journal Name, V ol . V, No. N, Month 20YY.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment