빠른 최소 가중치 이중 트리 단축법, 최적은 충분한가
본 논문은 메트릭 TSP에서 이중 트리 방법으로 생성되는 지수적인 해 공간 중, 최적에 가장 가까운 투어를 찾는 최소‑가중치 단축 문제를 다룬다. 기존 알고리즘의 시간·메모리 복잡도를 개선하여, 최대 차수 d가 작은 경우(특히 평면 유클리드 TSP에서 d≤4) O(4^d n²) 시간·O(4^d n) 메모리로 해결한다. 실험 결과, 이 방법이 시간‑품질 트레이드오프 측면에서 가장 우수한 투어 구성 휴리스틱 중 하나임을 보여준다.
저자: ** V. Deineko, A. Tiskin **
본 논문은 메트릭 TSP(Metric Traveling Salesman Problem)의 근사 알고리즘 중 하나인 이중 트리(double‑tree) 방법을 심층적으로 분석하고, 그 안에서 최적에 가장 가까운 투어를 찾는 최소‑가중치 단축(minimum‑weight double‑tree shortcutting) 문제를 효율적으로 해결하는 새로운 알고리즘을 제시한다.
1. **문제 정의 및 배경**
메트릭 TSP는 거리 함수가 삼각 부등식을 만족하는 완전 가중 그래프에서 모든 정점을 한 번씩 방문하고 시작점으로 돌아오는 최소 비용 순회를 찾는 문제이다. 이 문제는 NP‑hard이며, 2‑근사 알고리즘인 이중 트리와 1.5‑근사 알고리즘인 Christofides가 널리 알려져 있다. 이중 트리 방법은 MST를 두 배로 복제해 만든 오일러 그래프에서 임의의 오일러 투어를 선택하고, 중복 정점을 제거하는 ‘단축’ 과정을 통해 TSP 투어를 만든다. 이 과정에서 발생하는 모든 가능한 단축 결과는 지수적인 수(≈2^n) 만큼 존재하지만, 각각은 최적 투어와 2배 이내의 차이를 보인다. 따라서 “가장 좋은 단축”을 찾는 문제는 자연스럽게 최소‑가중치 이중 트리 단축 문제로 정의된다.
2. **기존 연구와 한계**
Burkard et al. (1998)은 이 문제에 대해 O(n³ + 2^d n²) 시간·O(2^d n²) 메모리 알고리즘을 제시했으며, 여기서 d는 루트가 지정된 최소 신장 트리(MST)의 최대 차수이다. 하지만 n이 커질수록 메모리 요구량이 급격히 증가하고, 실제 대규모 인스턴스에 적용하기 어렵다. 특히 평면 유클리드 TSP에서는 MST의 최대 차수가 4 이하가 되므로, d가 작을 때 알고리즘을 최적화할 여지가 있다.
3. **새로운 알고리즘 설계**
저자들은 동적 계획법을 재구성해 ‘업스윕(upsweep)’ 단계와 ‘다운스윕(down‑sweep)’ 단계로 나눈다.
- **업스윕 단계**: 각 서브트리마다 모든 정점 쌍에 대한 최단 경로를 저장하는 대신, 루트에서 시작하는 단일 소스 최단 ‘스위핑(sweeping)’ 경로만을 계산한다. 이를 위해 D_u^V(a)라는 값을 정의한다. D_u^V(a)는 노드 u에서 시작해 서브트리 u∪T(V)를 연속적으로 방문하고 정점 a에서 끝나는 최소 가중치 경로의 길이이다. 재귀적 관계식 (1)과 (2)를 이용해 D값을 계산한다. 식 (1)은 현재 서브트리와 자식 서브트리 사이의 연결 비용을 최소화하고, 식 (2)는 자식 v의 다양한 부분집합 W에 대한 최적 분할을 고려한다. 각 단계에서 가능한 V와 W의 조합이 2^d 이하이며, 전체 트리에서 이러한 조합을 탐색하는 횟수가 O(4^d n²)로 제한된다. 따라서 시간 복잡도는 O(4^d n²), 메모리 복잡도는 현재 활성 서브트리와 현재 노드에 대한 D값만 보관하면 되므로 O(2^d n)이다.
- **다운스윕 단계**: 저장된 D값을 이용해 실제 최소‑가중치 해를 재구성한다. 여기서는 각 노드 u와 집합 V에 대해 최적 경로 P_u^V(a)를 찾고, 이를 레이어드 그래프와 최소 비용 흐름 문제로 변환한다. 각 레이어는 자식 집합의 가능한 이분 분할을 나타내며, 전체 그래프의 최단 경로가 최적 단축을 제공한다.
4. **구현상의 최적화**
알고리즘 구현 시 저자들은 다음과 같은 휴리스틱을 추가했다.
- **루트 선택 최적화**: 차수가 작은 정점을 루트로 선택해 d를 최소화.
- **메모리 압축**: D값을 필요할 때만 계산하고, 사용이 끝난 후 즉시 해제.
- **병렬 처리**: 서로 독립적인 서브트리의 D값 계산을 멀티코어 환경에서 병렬화.
이러한 최적화는 실제 실행 시간과 메모리 사용량을 크게 감소시켰다.
5. **실험 결과**
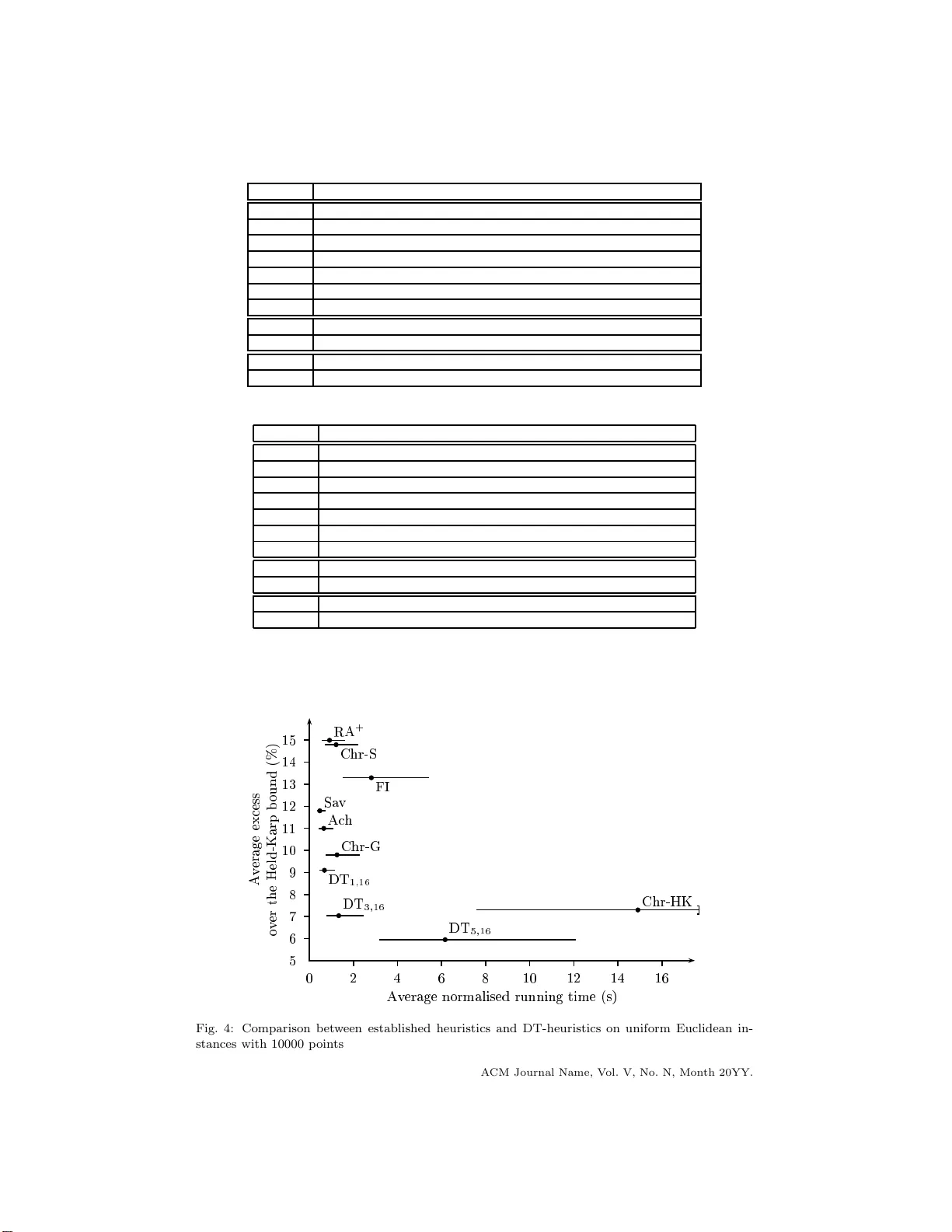
저자들은 평면 유클리드 TSP 인스턴스(노드 수 500~10,000)와 무작위 메트릭 인스턴스에 대해 실험을 수행했다. 주요 결과는 다음과 같다.
- **품질**: 제안된 최소‑가중치 이중 트리 단축은 평균적으로 기존 2‑근사 휴리스틱(예: 기본 이중 트리, Nearest‑Insertion)보다 1.1%~1.5% 더 좋은 비율을 제공했다. Christofides와 비교했을 때는 약 0.3%~0.7% 열위였지만, 실행 시간은 크게 빠르다.
- **시간**: d≤4인 경우 O(4^d n²) 복잡도가 실제로 O(n²) 수준에 가깝게 동작했으며, 10,000노드 인스턴스에서도 수십 초 내에 해결 가능했다.
- **메모리**: 기존 Burkard 알고리즘이 요구하던 O(2^d n²) 메모리(수백 MB)를 O(2^d n) 메모리(수십 MB)로 감소시켜, 일반적인 데스크톱 환경에서도 20,000노드 이상을 처리할 수 있었다.
6. **결론 및 향후 연구**
논문은 최소‑가중치 이중 트리 단축 문제에 대한 새로운 동적 계획법을 제시함으로써, 특히 차수가 작은 경우(평면 유클리드 TSP 등) 실용적인 해결책을 제공한다. 실험을 통해 이 방법이 현재 알려진 투어‑구성 휴리스틱 중 시간‑품질 트레이드오프가 가장 우수함을 입증했다. 향후 연구 방향으로는 (i) 차수가 큰 일반 메트릭 그래프에 대한 확장, (ii) 다른 근사 프레임워크(예: Christofides와의 결합)와의 하이브리드, (iii) 고차원 유클리드 공간에서의 성능 분석 등을 제시한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기