Collaborative model of interaction and Unmanned Vehicle Systems interface
The interface for the next generation of Unmanned Vehicle Systems should be an interface with multi-modal displays and input controls. Then, the role of the interface will not be restricted to be a support of the interactions between the ground opera…
Authors: Sylvie Saget, Francois Legras, Gilles Coppin
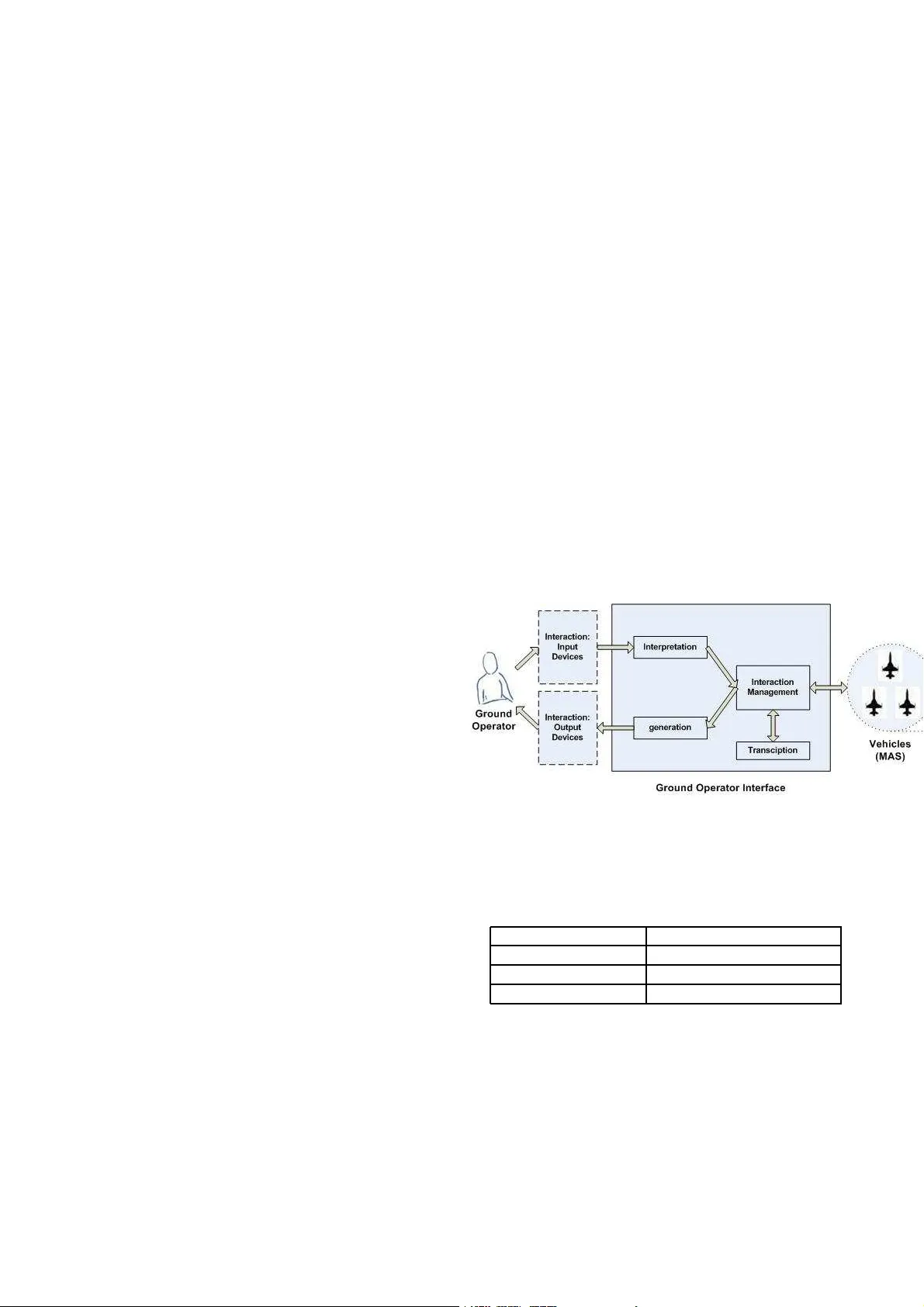
Collaborati v e model of interac tion and Unmanned V ehicle Sy stems’ i nterf ace Sylvie Saget François Legras Gilles Coppin TELECOM Institute, TELECOM Bretagne, LUSSI Departmen t Email: {sylvie.saget,fra ncois.legras,gilles.cop pin}@telecom-bretagne.eu Abstract — The interface for the next generation of Un- manned V ehi cle Systems should be an interface wi th mul ti-modal displays and input controls. Then , the role of th e interface wil l not be r estricted to be a support of the interactions between th e ground operator and vehicles. Interface must tak e part in the interaction management too. In this paper , we show that recent works i n pragmatics and philosophy [1] provide a suitable th eoretica l framework for th e next generation of UV S ystem’ s int erface. W e concentrate on two main aspects of th e collaborativ e model of interaction b ased on acceptance: multi-strategy app roac h f or communicativ e act generation and interpretation and communicativ e alignment. I N T R O D U C T I O N At th e mom ent, m ost Unma nned V ehicle (UV) Systems are single vehicle s ystems whose control mode i s teleoperation . Sev eral groun d o perators are needed in o rder to operate a vehicle. Besides, vehicles h a ve limited au tonomo us capab ili- ties. Con sequently , co ntrolling vehicle is such a har d task that it may lea d to an untra ctable cognitive load f or the grou nd operator [2]. In or der to make th is task more feasible and in order to redu ce the c ost of UV Sy stems in term of human resource, sev eral areas of reflection are explored: • drifting fro m UV system with a single vehicle to UV system with multiple vehicles [ 3], • increasing vehicle’ s auton omy [4] . As a result, control mod e will shift to a mo re flexible contr ol mode such as control/sup ervision in th e next genera tion of UV Systems. M oreover , th e r ole of th e ope rator will shift to controllin g/supervising a system o f se veral coo perating UVs perfor ming a jo int mission i. e. a Multi-Agen t Sy stem (MAS) [5]. In the same time, current w orks aim at enhancing the flexibility and the naturalness of interface rather than only improving the mission’ s realization and contro l. In particular , human- centered approaches introd uce new modalities ( gesture, spoken or written language, h aptic display , etc.) , [2], [6]. The interface for th e n ext g eneration of UV Systems shou ld b e an inter face with m ulti-moda l displays and in put con trols. Actually , multi-modal disp lays aim at making up for the "sensor y isolation " of groun d operato r , as well as re ducing cognitive and percep tual d emands [6]. This is esp ecially imp ortant consider ing the h igh visual dem and of such interface. More over , multi-mo dal controls aims at reducing cogn iti ve workloa d as well as at mak ing o perator’ s control more efficient [7]. For example, a data en try fu nction based on vocal keyword reco gnition may requ ire a single vocal utterance in the next g eneration of interface, while it may requir e over twenty separate manu al actions in the current generatio n of interface. Furtherm ore, h uman contr ol of MA S, such as contr ol-by-p olicy o r playbo ok, may req uire highly flexible an d le ss constrained languag e interaction [5]. Then, the role of the interface is not restricted to be a suppo rt of interaction s between the gro und op erator and vehicles. The interface must also transcribe the communicative informa tion in the suitable p resentation mo de fo r ea ch dialog partner . Besides, fu ture inter faces must also pr ovide tools in order to make the interaction managem ent easier . For example, the managem ent of interaction s with several vehicles b y the groun d op erator at the same time is quite complex. In terfaces must take part in the in teraction managem ent too. Actu ally , non-u nderstand ings are frequen t in "na tural" multi-mod al interaction. An utter ance of the g round op erator ma y not have been perceived because of backg round no ise, an utterance may be not-unde rstood because of an unknown word, a gesture o r an u tterance m ay be amb iguous or incoh erent, etc. A contr ol in put can be tra nsmitted to vehicles by the interface only if th is co ntrol inp ut h as been un derstood. Th us, th e interface has to manag e such no n-und erstandings. Inversely , the in terface has to manage g round operato r’ s attempts fo r clarification of non- understoo d multi-mo dal display . The co llaborative natu re of interaction ( or dialogu e) h a ve been brou ght into the forefro nt by research in pragm atics since mid-90 s [8]. Basing an inte rface’ s interac tion m anagemen t on suc h a mo del gives the interface and its u sers the c apacity to interactiv ely refine their u nderstandin g until a p oint of intelligibility is reac hed. Thus, such interface mana ges non-u nderstand ings 1 . Th is approac h have been used with in 1 Non-understa nding is commonly set apart misundersta nding. In a mis- understan ding, the addressee succeeds in communicati v e act’ s interpret ation, whereas in a non-underst anding he fails. But, in a misunderstandi ng, ad- dressee’ s interpret ation is incorrect. For ex ample, m isheari ng may lead to misunderstan ding. Misunderstandi ngs are considered here as the only kind of "communicati v e errors" (c.f. section II-A). T hus, the y are handle d by a reco very process, which is not supported by the interacti on model. the WIT AS dialo g system [9]. In this pap er , we show that rec ent works in pragmatics and philosoph y [1] p rovide a suitable theore tical framework f or the next generatio n of U V System ’ s interface. W e concentrate on two m ain aspects of the co llaborative model of inter action based o n ac ceptance: multi-stra tegy approach for gener ation and interpr etation of commun icativ e acts and commu nicativ e alignment. I . P R E L I M I N A RY D I S T I N C T I O N S A. T ask level versus I nteraction level While using a n UV System’ s in terface, th e gr ound op er- ator is a t least eng aged within two activities: mission c on- trol/superv ision an d inter action. This is th e gener al case o f all goal-or iented interactio n (or dialo gue): "Dialogues, th erefore, divide into two planes of activity [8]. On one plan e, people c reate dialogu e in service of the b asic joint activities they are eng aged in-makin g din ner, dealing with th e emergency , oper- ating the ship. On a secon d p lane, they m anage th e dialogue itself-d eciding who sp eaks when, establish- ing that an utterance has b een understoo d, etc. These two planes ar e n ot ind ependen t, for pro blems in the dialogue may have the ir sourc e in the joint activity the dialo gue is in service of , and vice versa. Still, in this v iew , b asic joint activities are primary , and dialogue is created to manag e them." [10]. Interaction is defined by dialog par tner’ s goals to understan d each oth er , in o ther words to reach a certain degree of intelligibility , sufficien t for the curr ent purpose . The crucial points here are that : 1) perfect u nderstand ing is n ot re quired, th e level of under- standing required is directed by t he basic acti vity ( i.e. the mission) and the situational co ntext ( i.e. time pressure for example); 2) as ground operator’ s cognitive load is "divided" be- tween the co gnitive load induced by ea ch activity , the interaction’ s c omplexity mu st vary depen ding o n the complexity inv olved by the mission [2]. For examp le, as time p ressure rises, th e cogn iti ve load induced by the mission increases. Th e cog nitiv e load re quired by the interaction must decrease in ord er to carry thro ugh the mission. All in all, a mo del o f interaction dedicated to UV System’ s interface has to suppo rt multi- strategy method s for com mu- nicative a cts generation an d interpretation . Howe ver , one may brin g to gether g eneration and inter- pretation m ethods in two main ty pes: metho ds following pragmatics fundame nt ( i.e. interaction model) , such as th e sin- cerity hyp othesis or the maxim of manne r [11], an d method s which do not. The first type aims at reaching high q uality of un derstandin g but are complex. The seco nd type aims at efficiency but q uality of u nderstand ing is no t ensured . Each kind of methods is mo no-strategic or su pport a little set of possible strategies. E xisting method s are interpr etation based on keyword reco gnition [12], statistical meth ods based on heuristics [13], more pragma tics-based appro ach [14], etc. In this p aper (section II-C), we present an intera ction model which is co herent with each typ e o f method. Thu s, an interac- tion manager based on such a model can support multi-strategy methods of commu nicativ e acts generation and inte rpretation. B. Interaction mo del versus Interaction management For methodolog ical reasons, the d istinction between in- teraction model (dialogu e mode l) and interac tion man ager (dialogu e manag er) h as to b e made clea r [15]. An interaction model is a th eoretical model which aims a t providing a gener al theory of inter action. An interaction manager is a c ompon ent of an interface, as sh own by the Fig. 1. An interface perceives events such as contro l input (com- municative act). After the per ception of an e vent, the interface interprets it. The r ole of the interaction manag er is to decide which is the suitable reaction. Following a control input fro m the g round o perator, a possible reaction is to transmit the command to th e prope r vehicle, if th e control input has bee n understoo d. Another possible reaction is to ask for clarificatio n to th e grou nd operato r if the control in put is ambiguou s. In versely , fo llowing a n amb iguous display , requests fo r clari- fications b y the groun d op erator have to be suppor ted by the interaction manager . Fig. 1. Architecture of an interface . There are sev eral kind of tec hnolog ical to ols dedicated to interaction man agement. Each kind of tech nological tool is based on a model of interaction , as shown b y Fig. 2 . Manager Model Dialog Grammar Adjacent Pairs [16] Plan-based manag er Speech Ac ts Theor y [17] Agent-based manager Cognitive mo dels [ 18], [19] Fig. 2. Interac tion managers and correspondi ng interactio n models. The choice o f an interac tion m anager is m ainly based on the task (mission) und erlying the in teraction [20]. Howe ver , each kind of in teraction mod el captures a particular aspect of inter action and m ay have consequen ces o n each kind o f interaction mana ger . Co gnitive mo dels o f interaction aim, for instance, at defining a symbo lic and explanator y model of inter action, wh ereas Adjacent Pairs provide a d escriptive model of interactio n. Cogniti ve models may be considered as a logical r eformula tion o f plan -based mod els. Cognitive m odels integrate, in more, a prec ise fo rmalization of dialog partners’ mental states (their beliefs, choices (or desires) and intentions), of the ration al balanc e which relates mental attitudes between them and relates mental attitudes with agents’ acts. I I . C O L L A B O R A T I V E M O D E L O F I N T E R AC T I O N Basing inte raction man agement on a collaborative mod el of inter action giv es the interface the ab ility to manag e no n- understan dings, as shown in the first p art o f this section. A fo rmal collab orative m odel of interaction is generally based on a psycholingu istic mo del of interactio n. Howe ver , existing psych olinguistic mod els of interaction do not suppo rt multi-strategy approa ch fo r commu nicativ e ac t gener ation and interpretatio n. W e p ropose to base interaction management, for the next gen eration of U V Systems, o n a form al inter action model suppor ting such a multi- strategy app roach. T his form al model mixes and enhanc es the two main and compleme ntary psycholin guistic models of interaction . The seco nd part of this section intro duces these two psycholing uistic mode ls of interaction. A. T raditiona l view vs. Collaborative v iew of inte raction The traditio nal v iew o f interaction [1 1], [1 6], [17], [1 8], [19] de fines it as an unidirectional pr ocess resulting from two individual activities: the gen eration o f a communicative act by the "speaker" and the under standing and interpretatio n of this comm unicative act by th e addressee. Interactio n’ s success is warran ted by the co operative attitude o f the " speaker" (his sincerity , his relev ance, etc.). Consequen tly , the produc tion of a suitable com municative act is co ncentrated on a sin gle exchange and a single agent. The complexity ( i.e. the cognitive load) of such a pro cess is hig h because of th e necessary restrictiv e hypothesis [21]. M oreover , the set of possible strategies to p roduce and u nderstand a communica ti ve act is high ly limited. Besides, the ad dressee having a passiv e role, p ositi ve feedbacks such as "Okay", "Mhm" , "Uhuh", head nod es, etc., signalling successful un derstanding s, are not necessary . Finally , non-u nderstand ings are regarded as "commun icativ e errors" wh ich have to be handled by extra complex m echanisms. In con trast with th e tra ditional view , collaborative mo del of interac tion defin es it as a bidirectional process resu lting from a single social ac ti vity . Interactio n is considered as a collaborative a cti vity characterized by the goal o f reaching mutual understand ing, shared b y dialog p artners. Mutual understan ding is r eached thr ough interpr etation’ s negotiation. That is an inte ractiv e refinem ent of under standing until a sufficient p oint of intellig ibility is reach ed, illustrated by th e example shown in Fig. 3. User: Go to the building. System: Which building do yo u m ean? System: I can see a blue car at the tower . System: It is driving on Creek Lane . System: W ar ning m y fuel is low . User: I mean the school. Fig. 3. An example of interpreta tion negoti ation, [22 ]. Consequently , the p roduction o f a suitable comm unicative act can be divided between several exchanges and between all dialog pa rtners. The complexity of such pr ocess mu st be less comp lex than in th e tr aditional view of interaction [21]. Besides, th e addressee h as an activ e role, explicit and imp licit feedback s ar e req uired in order to publicly signa l successful understan dings. Finally , n on-un derstanding s are here regard ed as "the no rmal case", so their ma nagement is captured by collaborative mo del of interaction B. T wo complemen tary mode ls 1) Clark’ s Intentio nal model: Most o f formal co llaborative models of interaction are b ased o n the psycholing uist H. H. Clark’ s work [8], [ 23]. His work highlights the collab orative nature of interactio n, its realizatio n thro ugh a n egotiation process, its suc cess warranted by the use o f the co mmon groun d ( i.e. m utual beliefs) among dialog pa rtners, conceptu al pacts ( i.e. tempo rary , partner-specific alignm ent amo ng dialog partners on the description chosen for a particular obje ct). Basing interaction m anagemen t on this m odel is intere sting because: 1) Designing interaction as a collab orative p rocess en- hances mixed-initiative interaction . 2) Non-un derstanding s ar e interactively ma naged, thus in- terface’ s r obustness and flexibility are enhan ced. 3) Positi ve and n egati ve signals o f und erstanding s are consistently required , as part of the nego tiation p rocess. Howe ver , there are several limitation s ag ainst th is model [1 ]: 1) The systematic use of common groun d leads to mono- strategic and com plex generation an d interp retation of commun icativ e acts. In Human-H uman interac tions, di- alog partner s rely on different strate gies. The com plexity of the strategy vary depend ing on the context, depending on time pressure for example. 2) Considering comm on g round as a set of mu tual beliefs leads to comp utational limitations and p aradoxes, as human beings tend s to have selfish and self-dec eptiv e attitudes. T o sum up, this m odel is su itable for mod eling no n- understan dings managem ent through interpretatio n negotiation. Nevertheless, interpretation negotiation , as defined in this mo del, is too restrictive. This is d ue to systematic use of co mmon ground and defining com mon groun d as a set of mutu al b eliefs, i.e. a strong er d efinition o f the sincerity hyp othesis. 2) The Interactive Alignment Mo del: Ano ther model of the collaborative n ature of inter action has been propo sed b y M. J. Pickering and S. Garrod [24]: the Interactive Alignment Model (IAM). IAM claim s th at dialog partn ers becom e alig ned at se veral linguistics aspects. In the particular case of spoken dialog, there is an align ment, for example, of the situatio n model, of th e lexical and the synta ctic levels, even of clarity of articulation, of accent and of speech rate. For example, syn tactic a lignment is freq uent in question - answer , such as in Fig. 4. User: Is there a vehicle near th e hospital? System: Y es, there are three vehicles near the hospital. Fig. 4. An example of syntactic alignmen t. Reference alignment cor responds to the no tion of " concep- tual pacts" in Clark’ s model: an alignm ent on th e d escription chosen to refer to a par ticular object du ring inter action, as shown in Fig. 5. User: Keep watch at the big zone near the ho spital . . . . User: There are intrude rs in the zone near the ho spital . Fig. 5. An example of reference alignmen t. These alignments results fr om auto matic pro cesses based on p riming. Primin g consists in reusing the result of a precedin g cognitive pr ocess, such as p erception o r actio n execution, in a following co gnitive process. I n the p articular case of interaction, p riming co nsists in reu sing words or syntactic co nstructions recently un derstood or gen erated. As an automatic process, pr iming d oes no t indu ce any cognitive load. Besides, these alignmen ts facilitate com municative act generation and in terpretation, as well as facilitate social relationship (confiden ce, rappo rt, etc.), [25]. T o sum up, th is mode l is suitab le for en hancing commun icativ e act generation and interpretation. I t a llows reusing results o f pr eceding su ccessful in teractions fo r the treatment o f following communicative acts. Su ch results are part of the commo n g round amon g dialog p artners, i.e. co-con struction of "in teractiv e" too ls during interaction. IAM is viewed here as a co mplementa ry mod el of Clark’ s work. That is, e ach m odel pr ovides an alternative strategy w hich can be used to generate or inter pret a particular com municative act. I n addition, negotiatio n in terpretation, as d escribed in Clark’ s mod el, m anages n on-un derstanding s. C. Collaborative in teraction model based on acce ptance S. Garrod and M. J. Pickering claim that considering interaction as a collabo rativ e activity must lead to avoid or to m odify fu ndamental hy pothesis responsib le of sev eral limitations [21]. Generally speaking , d ialog p artners are supposed to be rational w hile inter acting. Their rationality is partly defined by the ir sincerity , i.e. they have to use (mutually ) tru e statements in order to b e under stood. This sincerity hyp othesis h ighly limits the set of po ssible strategies for commu nicative acts g eneration and in terpretation. Thus, selfish or self-decep tiv e attitudes are con sidered as being irrational, automatic pro cesses such as priming ar e no t allowed, etc. In preceding works, the in coheren ce o f the systematic use of th e sincerity hy pothesis has been demon strated [1], [26]. I n fact, inter action is a goal-orie nted pr ocess which aims h ere at transmitting in formation s and co ntrol orders. A par ticular commun icativ e act aims at co ntributing to: 1) enabling the addre ssee to interpr et it, 2) ensuring the correc tness of his interpr etation, 3) contributing to mission’ s realization . Thus, its generation and interp retation has to be more or less efficient depend ing on the cur rent task and situation al context (ex. tim e p ressure), cf. section I-A. The pr oblem with the sincerity hy pothesis is not that tru e statement can n ot enab le to reach th ese goals. The prob lem is that there is a confusion between what is the aim of the interaction and what is th e suitable strategy to use. Distinguishing these two aspects av oid to imp ose a particu lar and single strategy . In ord er to intro duce th e distinction in a collabo rativ e model of in teraction, the philosop hical n otion of acceptan ce is used [1], [ 26]. T hus, the suitable type of interactio n mod el is cognitiv e model. Acceptance is the contextual mental attitude underlyin g a go al-oriented activity , whereas b elief is the contextual m ental a ttitude un derlying a truth -oriented activity [26]. Acc i ( ϕ, φ ) stand s for "the agent i a ccepts ϕ in o r der to bring abou t φ " . Here, φ is the co mplex goal defined in th e preceding paragra ph. ϕ is an association b etween an interactive tool IT (a gesture, a multi-mo dal display , an utteran ce, etc.) and the in tended meanin g I M ( a par ticular object, an orde r , an informa tion, etc.): φ = communicate _ by ( I M , I T ) stands f or "using I T to commun icate I M " . Generation is v ie wed as ch oosing an inter acti ve tool knowing the intended meaning to co n vey . Interp retation is viewed as identifying the inten ded meaning kn owing the interactive tool. Such definitions do n ot set the strategy to use. Thus, all possible strategies ca n b e considere d: • priming, • selfish attitude: consider ing solely their own b elief, • cooper ati ve attitud e: con sidering solely the add ressee’ s beliefs or knowledge, • basing interpreta tion on keywords recogn ition, • etc. The prop er strategy depen ds on the task, time pressure, interaction’ s history i.e. dep ends on existing con ceptual pacts, etc. Concernin g the inter action manag er , the inter action model defines in terpretation as a reactive p rocess within a cognitive model of interaction . Followi ng a commu nicativ e act and its interpr etation, th e addressee (i.e. the interface or the grou nd oper ator) is ob liged to react by: • signalling his u nderstandin g throug h an implicit or ex- plicit positive feedback , • requesting a refine ment ( i.e a clarification) of a no n- understoo d IT or asking for a "recasting" , • propo sing a refinemen t or a "recasting ", • postponin g his reaction becau se o f a top-prior ity goal to bring about. This is a social law , clo sed to the notion o f negotiation protoco l, wh ich models inter pretation negotiation handling non-u nderstand ing. Based on H.H. Clark’ s work, this social law provides different ways of reacting f ollowing a non- understan ding. Thus, the model of in teraction presented here provide multi-strategy app roach fo r comm unicative act’ s ge n- eration and interpre tation, as well as f or interaction manag e- ment. C O N C L U S I O N Interface of the next generation of UV Systems must support multi-strategy appro ach of communica ti ve act g eneration and interpretatio n. Moreover, the in terface has to take part to the interaction ma nagement through non -under standing handling in particu lar . Our goa l is to p rovide a su itable theoretical framework fo r fu ture interaction mana gers. W e present a collaborative mo del of interaction mixin g and enhancing the two main psycholog ical co llaborative o f in teraction. Further studies will hold on extend ing and ap plying our c ollaborative mo del of inte raction to th e p articular case of topo logical an d tactica l reference s used in UV Systems. First at all, we will fo cus on analyz ing a nd mode ling strategic choices and o n defining a suitab le representatio n of the "interactive too l". R E F E R E N C E S [1] S. Saget an d M. Guyomard, “Goal -oriente d dial og as a coll aborati v e sub- ordinat ed acti vit y in vol ving colla borati v e acce ptance, ” in Pr oce edings of Brandial ’06 , Univ ersity of Potsdam, Germany , 2006, pp. 131–138. [2] M. Mouloua, Gilson, J. R., Kring, and P . Hancock, “W orkload, situa tion aw areness, and teaming issues for uav/u cav operat ions, ” in Proc eedings of the Human F actors and Ergonomi cs Society , vol. 45, 2001, pp. 162– 165. [3] C. Johnson, “In ve rting the control ratio : H uman control of large, autonomous teams, ” in P r oceed ings of AAMA S’03 W orkshop on Humans and Multi-Agent Systems , 2003. [4] S. Dixon and C. W ick ens, “Control of multiple -uavs : A workload analysi s, ” in Proce edings of the 12th Internati onal Symposium on A via tion Psycholo gy , 2001. [5] F . Legras and G. Coppin, “ Autonomy spectrum for a multiple uavs system, ” in COGIS’ 07 - COgnitiv e s ystems with Interact ive Sensors , 2007. [6] D. Gunn, W . Nelson, R. Bolia, J. W arm, D. Schumsky , and K. Corcoran, “T arget acquisition w ith uavs: V igila nce displays and adva nced cueing interf aces, ” in P r oceed ings of the Human F ac tors and Ergonomics Societ y 46th Annual Meeting , 2002, pp. 1541–1545. [7] D. Will iamson, M. Draper , G. Calhoun, and T . Barry , “Commerci al speech recognition technolo gy in the military domain: Results of two recent research eff orts, ” Internati onal Jou rnal of Speech T e chnol ogy , vol. 8, no. 1, pp. 9–16, 2005. [8] H. H. Clark, Using languag e . Cambridge , UK: Cambridge Univ ersity Press, 1996. [9] O. Lemon, A. Gruenstein, L. Cavedo n, and S. Peters, “Collabo rati ve dialogu e for controll ing autonomous systems, ” in Procee dings of AAAI F all Symposium , 2002. [10] A. Bangerter and H. Clark, “Nav igating joint project s with dial ogue, ” Cogni tive Science , vol. 27, pp. 195–225, 2003. [11] H. P . Grice, “Logic and con ve rsation, ” Syntax and Semantics, Speec h Acts , vol. 3, pp. 43–58, 1975. [12] K. S himada, T . E ndo, and S. Mine waki , “Speech understandi ng based on keywor d extrac tion and rela tions between word s, ” Computational Intell igenc e , vol. 23, no. 1, pp. 45–60, 2007. [13] Y .-Y . W ang, “Rob ust langua ge understandin g in mipad, ” in EUR OSPEECH-2001 , 2001. [14] C. Gardent and K. Striegnit z, “Generati ng bridging definite descrip- tions, ” Computing Meaning , Studies in Linguist ics and Philosophy Series , vol. 3, 2007. [15] W . Xu, B . Xu, T . Huang, and H. Xia, “Bri dging the ga p betwee n dialogue management and dialogue models, ” in Proce edings of the 3rd SIGdial W orkshop on Discourse and Dialogue , vol . 2, 2002, pp. 201–210. [16] H. Sacks, E. Sche glof f, and G. Jefferso n, “ A simplest systematics for the organiza tion of turn-taking in con v ersatio n, ” in Studie s in the Orga nization of Con ver sational Intera ction , J. Schenk ein, Ed. Ne w Y ork: Academic Press, 1978. [17] J. R. S earle , Speec h A cts: A n essay in philosphy of language . Cam- bridge: Cambridge Univ ersity Press, 1969. [18] P . R. Cohen and H . J. Leve sque, “Rationa l interacti on as the basis for communicat ion, ” in Intentions in Communication . Cambridge , MA: MIT Press, 1990, pp. 221–256. [19] M. D. Sadek, “Communicati on theory = rationali ty principl es + commu- nicat iv e act models, ” in AAAI-94, W orkshop on Planning for Inter ag ent Communicat ion , 1994. [20] J. F . Allen, D. K. Byron, and M. Dziko vska, “T ow ards con versat ional human-comput er intera ction, ” A I Magazine , vol. 22, no. 4, pp. 27–37, 2001. [21] S. Garrod and M. Picke ring, “Why is con ver sation so easy?” T r ends in Cogni tive Sciences , vol. 8, pp. 8–11, 2004. [22] O. Lemon, A. Gruenstei n, R. Gullett, A. Battle, L. Hiatt, and S. Peters, “Genera tion of collaborat iv e spoken dialogue contribut ions in dynamic task en vironmen t, ” in W orking P ape rs of the 2003 AAAI Spring Sympo- sium on Natural Language Generatio n in Spoken and Writte n Dialo gue , R. Freedman and C. Calla wa y , Eds. AAAI Press, 2003, pp. 85–90. [23] S. E. Bren nan and H. H. Clark, “Conceptu al pacts and le xica l choice in con v ersation , ” Journal of Experimental Psycholo gy: Learning, Memory and Cognition , vol. 22, pp. 482–1493, 1996. [24] M. J. Picke ring and S. Garrod, “T oward a m echani stic psychology of dialogu e, ” Behavio ral and Brain Sciences , vol. 27, pp. 169–225, 2004. [25] J. L. Lakin, V . E. Jeffe ris, C. M. Cheng, and T . L. Chartra nd, “The chamele on ef fect as social glue: E videnc e for the e volut ionary s ig- nificanc e of nonconscious mimicry , ” Journal of Non verbal Behavior , vol. 27, pp. 145–162, 2003. [26] S. Saget and M. Guyomard, “Principe s d’un modèle colla boratif du dialogu e basé sur la notion d’acce ptation , ” in Annales du LA MSADE, Modèle s F ormels de l’Inter action (MFI’07), Actes des Quatrièmes J ournées F ranco phones , Pari s, France, 2007, pp. 239–248.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment