다중모달 협업 인터페이스를 위한 무인 차량 시스템 상호작용 모델
본 논문은 차세대 무인 차량(UV) 시스템의 인터페이스를 다중모달 디스플레이와 입력을 지원하는 협업형으로 설계해야 함을 주장한다. 기존의 일방향 통신 모델을 넘어, 대화 참여자 간의 상호 이해와 협상을 기반으로 한 ‘수용(acceptance)’ 이론을 적용한다. 이를 통해 의사소통 행위의 생성·해석에 다중 전략을 적용하고, 대화 정렬(Alignment) 메커니즘을 활용해 인지 부하를 감소시키며, 비정상 상황을 자동으로 관리하는 인터페이스 관리 …
저자: Sylvie Saget, Francois Legras, Gilles Coppin
본 논문은 차세대 무인 차량(Unmanned Vehicle, UV) 시스템의 인터페이스 설계에 대한 새로운 패러다임을 제시한다. 기존 UV 시스템은 주로 단일 차량을 원격 조종하는 형태였으며, 운영자는 다수의 조작자를 필요로 하고 인지 부하가 크게 증가하는 문제가 있었다. 이러한 한계를 극복하기 위해 연구자는 두 가지 주요 흐름을 제시한다. 첫 번째는 시스템 자체를 다중 차량(Multi‑Agent System, MAS)으로 확장하고, 차량의 자율성을 높여 운영자가 ‘제어/감시(control/supervision)’ 역할로 전환하도록 하는 것이다. 두 번째는 인간‑중심 인터페이스에 다중모달 디스플레이와 입력 방식을 도입해, 시각·청각·촉각 등 다양한 감각 채널을 활용함으로써 운영자의 ‘센서 격리’를 해소하고 인지·지각 부하를 감소시키는 것이다.
하지만 다중모달 인터페이스는 새로운 문제를 야기한다. 음성 인식 오류, 배경 소음, 제스처 인식 실패 등으로 인해 ‘비이해(non‑understanding)’ 상황이 빈번히 발생한다. 기존 인터페이스는 이러한 비이해를 단순히 오류로 처리하거나, 별도의 복구 절차를 제공하지 못했다. 따라서 논문은 인터페이스 자체가 대화 관리 역할을 수행하도록 설계해야 한다고 주장한다. 즉, 인터페이스는 입력을 감지·해석하고, 필요 시 명확화 질문을 제시하거나, 비이해 상황을 자동으로 협상 과정을 통해 해결해야 한다.
이를 위해 저자는 최근 언어학·철학 분야에서 제시된 ‘협업 모델(collaborative model)’을 기반으로 한 이론적 틀을 도입한다. 전통적인 일방향 대화 모델은 화자가 발화를 생성하고 청자가 이를 이해한다는 가정에 기반한다. 이 모델은 ‘진실성(sincerity)’ 가정을 전제로 하여, 발화가 반드시 사실에 부합하고 관련성이 있어야 한다는 제한을 둔다. 그러나 실제 인간‑컴퓨터 상호작용에서는 시간 압박, 인지 부하, 목표 지향적 의사소통 등으로 인해 이러한 가정이 현실적이지 않다.
논문은 ‘수용(acceptance)’이라는 개념을 도입해 이러한 한계를 극복한다. 수용은 대화 상대가 발화를 완전히 진실하거나 완전하게 이해할 필요 없이, 현재 목표 달성을 위해 충분히 받아들일 수 있으면 된다는 의미이다. 이를 통해 인터페이스는 다양한 전략을 동적으로 선택할 수 있다. 구체적으로는 다음과 같은 두 축을 제시한다.
1. **다중 전략 접근법(Multi‑Strategy Approach)**
- **고품질·고복잡도 전략**: 의미론적 추론, 계획 기반 대화 관리, 개념적 협약(conceptual pact) 등을 활용해 정확하고 풍부한 이해를 도모한다. 이는 임무가 복잡하거나 오류 허용도가 낮은 상황에 적합하다.
- **고효율·저복잡도 전략**: 키워드 매칭, 통계적 히스토리 기반 히어스틱, 프리셋 명령어 매핑 등으로 빠른 응답을 제공한다. 긴급 상황이나 인지 부하가 높은 경우에 활용한다.
인터페이스는 현재 상황(시간 압박, 임무 중요도, 오류 위험 등)을 평가해 적절한 전략을 선택하거나, 필요 시 전략을 전환한다.
2. **대화 정렬(Communicative Alignment)**
- **Clark의 의도 모델**: 공동 기반(common ground)과 개념적 협약을 통해 비이해 상황을 협상적으로 해결한다. 인터페이스는 대화 상대와의 공동 기반을 지속적으로 업데이트하고, 필요 시 명시적 확인 질문을 제시한다.
- **Interactive Alignment Model (IAM)**: 대화 참여자 간에 어휘·구문·상황 모델이 자동으로 정렬되는 현상을 활용한다. priming 메커니즘을 통해 최근에 사용된 단어·구문을 재사용함으로써 인지 부하를 최소화한다. 예를 들어, 운영자가 “빨리 이동”이라고 명령하면 시스템은 이후 명령에서도 동일한 어휘·구문을 선호한다.
두 모델은 상호 보완적으로 작동한다. Clark 모델은 비이해 상황을 탐지하고 협상 과정을 제공하는 반면, IAM은 정상적인 대화 흐름에서 자동 정렬을 통해 효율성을 높인다. 논문은 이 두 모델을 결합한 ‘수용 기반 협업 모델’을 제안하며, 이를 구현하기 위한 시스템 아키텍처를 제시한다.
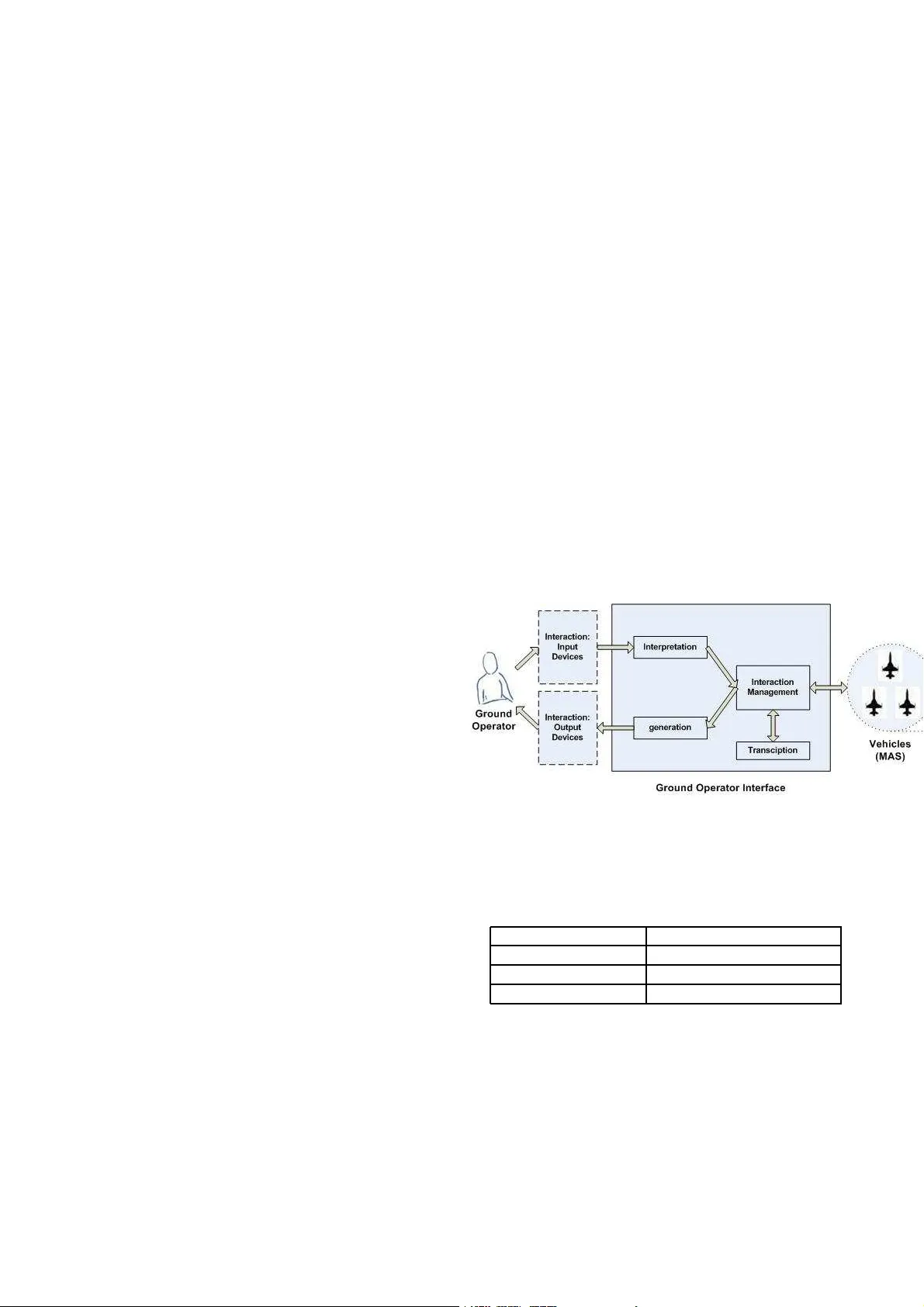
**시스템 아키텍처**
- **입력 감지 모듈**: 음성, 제스처, 터치 등 다중모달 입력을 실시간으로 수집한다.
- **전략 선택 엔진**: 현재 상황 파라미터(시간, 임무 중요도, 오류 발생 빈도 등)를 기반으로 적절한 해석·생성 전략을 선택한다.
- **대화 관리 모듈**: 선택된 전략에 따라 대화 모델(인접 쌍, 계획 기반, 인지 모델 등)을 적용한다. 비이해가 감지되면 자동으로 ‘해석 협상’ 절차를 시작한다.
- **피드백 및 정렬 모듈**: IAM 기반 priming을 통해 최근 대화 내용에 기반한 어휘·구문 정렬을 수행하고, 운영자에게 최소한의 확인 피드백(“알겠습니다”, “네”)을 제공한다.
이러한 구조는 다중 UAV가 협업하는 복합 임무에서 각 차량에 대한 명령 전달을 정확히 수행하면서도, 운영자의 인지 부하를 최소화한다. 예를 들어, 다수의 차량이 동시에 목표 지역을 탐색해야 할 때, 운영자는 “전체 차량을 북쪽으로 이동”이라는 간단한 명령만으로 시스템이 각 차량에 맞는 세부 명령을 자동으로 분배하고, 필요 시 정밀한 확인 질문을 통해 오류를 방지한다.
결론적으로, 논문은 차세대 UV 시스템 인터페이스가 **다중모달, 다중전략, 협업적**이어야 함을 강조한다. ‘수용’이라는 이론적 토대를 통해 인터페이스는 인간과의 대화에서 완전한 진실성이나 완전한 이해를 요구하지 않고, 목표 지향적이며 유연한 의사소통을 가능하게 한다. 이는 향후 무인 시스템이 복잡한 임무를 수행하면서도 인간 운영자와 자연스럽고 효율적으로 협업할 수 있는 기반을 제공한다.
원본 논문
고화질 논문을 불러오는 중입니다...
댓글 및 학술 토론
Loading comments...
의견 남기기