Computing Minimum Spanning Trees with Uncertainty
We consider the minimum spanning tree problem in a setting where information about the edge weights of the given graph is uncertain. Initially, for each edge $e$ of the graph only a set $A_e$, called an uncertainty area, that contains the actual edge…
Authors: Thomas Erlebach, Michael Hoffmann, Danny Krizanc
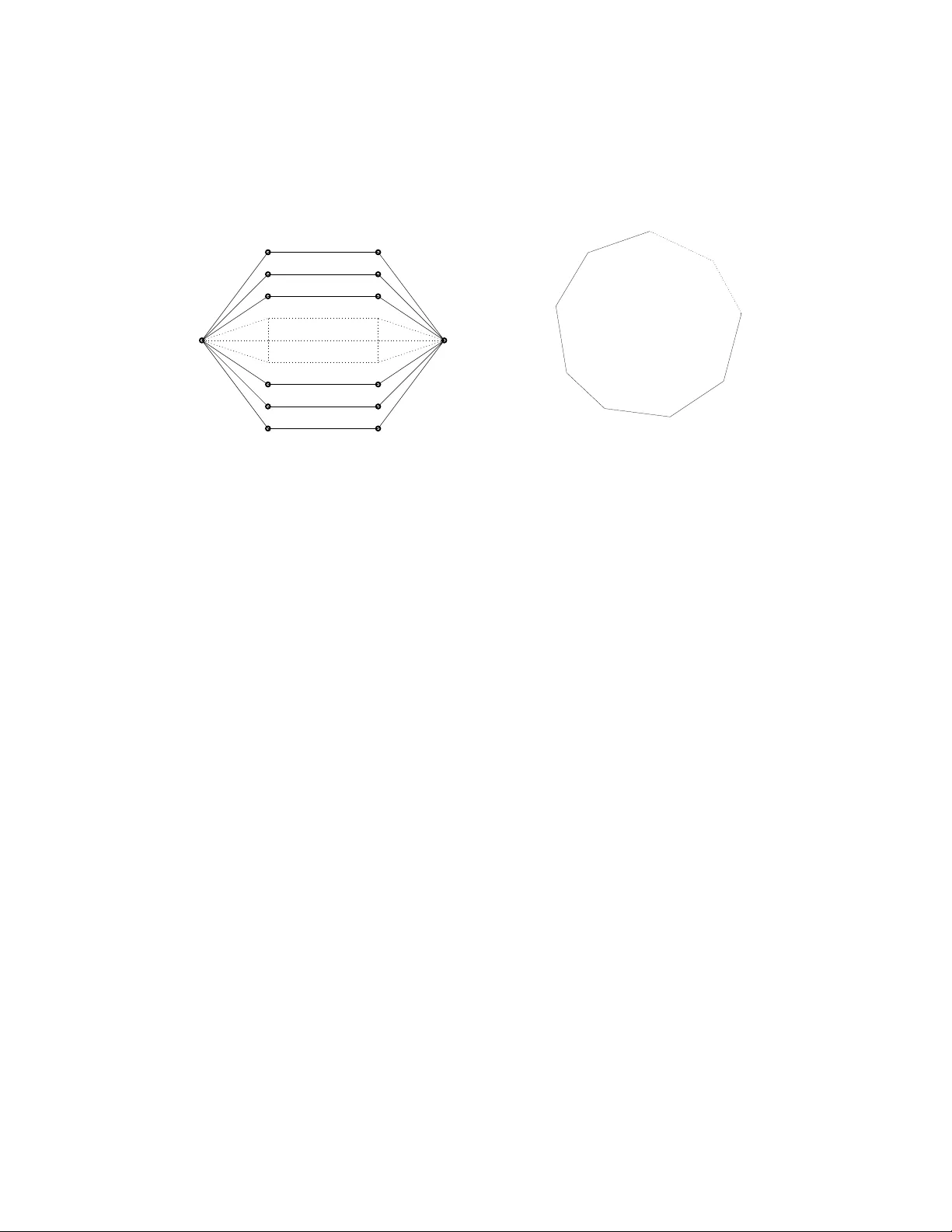
Symposium on Theoretical Aspects of Computer Science 2008 (Bordeaux), pp. 277-288 www .stacs-conf .org COMPUTING MINIMUM SP ANNING TREES WITH UNCER T AINTY THOMAS ERLEBAC H 1 , MICHAEL HOFFMANN 1 , DANNY KRIZAN C 2 , MA T ´ U ˇ S MIHAL’ ´ AK 3 , AND RAJEEV RAMAN 1 1 Department of Computer Science, Universit y of Leicester, UK. E-mail addr ess : {te17, mh55, rr29}@mcs.le.ac .uk 2 Department of Mathematics and Computer Science, W esleyan Universit y , USA. E-mail addr ess : dkrizanc@w esleyan.edu 3 Institut f¨ ur Theoretische In formatik, ETH Z ¨ uric h, Switzerland. E-mail addr ess : matus.miha lak@inf.ethz.ch Abstra ct. W e consider th e minimum spanning tree problem in a setting where informa- tion abou t the edge weigh ts of th e given graph is uncertain. In itially , for each edge e of the graph only a set A e , called an unc ertainty ar e a , that contains the actual edge w eight w e is known. T he algorithm can ‘up date’ e to obtain the edge w eight w e ∈ A e . The task is to output t he ed ge set of a minimum spanning tree after a minimum number of up dates. An algorithm is k -u p date competitive if it makes at most k times as many up dates as the optimum. W e present a 2-up date comp etitive algori th m if all areas A e are op en or trivial, whic h is the b est p ossible among deterministic algorithms. T he condition on th e areas A e is to exclude degenerate inp uts for which n o constan t up date comp etitive algori th m can exist. Next, w e consider a setting where the vertices of th e graph corresp ond to p oints in Euclidean sp ace and the weigh t of an edge is equal to th e distance of its endp oints. The location of each p oint is initially given as an uncertaint y area, and an up d ate revea ls the exact lo cation of the p oi nt. W e giv e a general relation b etw een the edge un certain ty and the vertex uncertaint y versions of a problem and use it t o d erive a 4-u p date competitive algorithm for the minimum spanning tree problem in the vertex uncertaint y model. Again, w e show th at this is b est p ossible among deterministic algori th ms. Key wor ds and phr ases: Algorithms and data stru ctures; Current challenges: mobile and net compu ting. P art of the presented researc h wa s und ertaken whil e the second and fifth author were on stud y lea ve from the Universi ty of Leicester and the second author w as visiting the U niversit y of Q ueensland. The authors w ould like to thank th ese institutions for their supp ort. c T . Erlebach , M. Hoffmann, D . Kr izanc, M. Mihal’ ´ ak, and R. Raman CC Creative Commons Attribution- NoDeriv s License 278 T. ERLEBACH, M. HOFFMANN, D. KRIZANC, M. MIHAL’ ´ AK, AND R. RAMAN 1. In tro duction In man y applications one has to deal w ith computational problems where some parts of the inp ut data are imp recise or uncertain. F or example, in a geometric problem inv olving sets of p oi nts, the lo cations of the p oi nts m ight b e known only approxi mately; effectiv ely this means that in stead of the lo cation of a p oint , only a region or area con taining th at p oint is kno wn. In other applications, only estimates of certain input parameters ma y b e kno wn , for example in form of a probabilit y distribution. There are man y differen t approac h es to d ealing with p roblems of this t yp e, including e.g. sto chasti c optimization and robust optimization. Pursuin g a different approac h, we consider a setting in whic h the algorithm can obtain exact information ab out an in put d ata item using an up date op eration, and we are interested in the up date c omplexity of an algorithm, i.e., our goal is to compute a correct solution u sing a minimum num b e r of up dates. T he up dates are adaptive, i.e., one selects the next item to up date based on the result of the up d ates p erform ed so far, so w e r efer to the algo r ith m as a n on-line algorith m . There are a n u m b er of applicat ion areas where this setting is meaningful. F or example, in a m obile ad-ho c net work an algorithm ma y h a v e knowledge ab out the appro ximate lo cations of all no des, and it is p ossible (but expen s iv e) to find out the exact cur r en t location of a n o de by comm un icating to that n o de and requesting that inform ation. T o assess the p er f ormance of an algorithm, w e compare the num b er of up d ates that the algorithm mak es to the optimal num b er of u p dates. H ere, optimalit y is defined in terms of an adversary , wh o, kno wing the v alues of all input parameters, mak es the fewest u p dates needed to present a solution to the pr oblem that is pr o v ably correct, in that no add itional areas need to b e up dated to verify the correctness of the solution claimed by the adv ersary . W e sa y that an algorithm is k - up date c omp etitive i f, for eac h input in s tance, the algorithm mak es at most k times as many up date s as the o ptimum n umb er of up d ates for that input instance. The n otions of up date complexit y and k -up date comp etitiv e algorithms w ere implicit in Kahan’s mod el for data in motion [6] and studied further for t wo- d imensional geometric problems by Bruce et al. [2]. In this p ap er, we consider the classical minimum spanning tree (MST ) problem in t wo settings with uncertain inf orm ation. In the first setting, the edge wei ghts are initially give n as uncertaint y areas, and the algorithm can obtain the exact w eigh t of an edge b y up dating the edge. If the u ncertain t y areas are trivial (i.e., con tain a single n umb er) or (top olo gically) op en, we giv e a 2-up date comp etitiv e algorithm and s h o w that this is b est p ossible for deter- ministic algorithms. Without this restriction on the areas, it is easy to construct degenerate inputs for which th ere is no constan t up date comp etitiv e algorithm. Although degeneracy could also b e excluded by other means (similar to t h e “general p osition” a ssu mption in computational geometry), our condition is muc h cleaner. In the second setting that we consider, the v ertices of the graph corresp ond to p oin ts in Euclidean space, and th e locations of the p oin ts are initially giv en as u ncertain t y areas. The w eigh t of an edge equals the distance b et we en the p oin ts corr esp onding to its ve rtices. The algorithm can up date a vertex to rev eal its exact lo cation. W e give a general r elation b et ween the edge un certain t y v ersion and the v ertex uncertain ty v ersion of a pr oblem. F or trivial or op en uncertain ty areas w e obtain a 4-up d ate comp etitiv e algorithm for the MST problem with v ertex uncertain t y and sh o w again th at this is optimal for d eterministic algorithms. COMPUTING MINIMUM SP ANNING TRE E S WITH UNCER T AINTY 279 Related W ork. W e do not attempt to survey th e v ast literature dealing with problems on uncertain data, but fo cus on wo r k most closel y related to ours. Kahan [6] studied the problem of finding the maxim um, the median and the minimum gap of a set of n real v alues constrained to fall in a giv en set of n r eal inte r v als. In the spirit of comp etitiv e analysis, he defined the lucky r atio of an up date strategy as the wo r s t-case ratio b et wee n the num b er of u p d ates made b y th e strategy and the optimal n umb er of up dates of a non-deterministic strategy . I n our terminology , a s tr ategy with luc ky ratio k is k -up date comp etitiv e. Kahan ga v e strategi es with optimal lu c ky ratios f or the problems considered [6 ]. Bruce et al. stu died the pr oblems of computing maximal p oin ts or the p oints on the con v ex hull of a set of uncertain p oin ts [2] and p resen ted 3-up date comp etitiv e algo r ith m s. They in tro du ced a general metho d, called the witness algorithm , for dealing with problems in vo lving uncertain data, and deriv ed their 3-up d ate comp etitiv e algorithms usin g that metho d. The algo rith m s we present in this pap er are based on the metho d of the witness algorithm of [2], b ut the application to the MST problem is non-trivial. F eder et al. [5, 4], consider t wo problems in a s imilar framewo rk to ours. Firstly , they consider the p roblem of computing the median of n num b ers to within a giv en tolerance. Eac h input num b er lies in an inte r v al, and an up date r ev eals the exact v alue, bu t differen t in terv als ha ve different up date costs. They consider off-line algorithms, which must decide the sequence of up dates pr ior to seeing the answ ers, as we ll as on-line ones, aiming to minimize the total up date cost. In [4], off-line algorithms f or computing th e length of a shortest path from a source s to a giv en v ertex t are consid ered. Again, the edge lengths lie in int erv als with different up date costs, and they stu dy th e computational complexit y of minimizing the total up d ate cost. One d ifferen ce b et ween the fr amew ork of F ed er et al. and ours is that th ey require the computation of a sp ecific n umer ic v alue (the v alue of the median, the length of a shortest path). W e, on the other h and, aim to obtain a subs et of ed ges that form an MST. In general, our version of the p roblem may require far fewe r up dates. Indeed, for the MST with verte x uncertain ties, it is ob vious that one m ust up date all non-trivial areas to compute the cost of the MST exactly . Ho we ver, the cost of th e MST ma y not b e needed in man y cases: if the MST is to b e u sed as a routing s tructure in a wireless ad-ho c netw ork, then it su ffices to determine the edge set. Also, our algorithms aim to wards on-line optimalit y against an adv ersary , wh ereas their off-line algorithms aim for static op timalit y . F urther w ork in this ve in attempts to compute other aggregate fu nctions to a giv en degree of tolerance, and establishes tradeoffs b etw een up d ate costs and error tolerance or present s complexit y resu lts for computing optimal strategies, see e.g. [10, 8]. Another line of w ork considers the robus t sp anning tree pr oblem with interv al data. F or a giv en graph with w eigh t inte r v als sp ecified for its edges, the goal is to compute a spanning tree that min im izes th e w orst-case d eviation from the m in im um sp anning tree (also called the r e gr et ), ov er all r ealizat ions of the edge we ights. This is an off-line problem, an d no up d ate op erations are inv olved. The p roblem is p r o v ed N P -hard in [1]. A 2-appro ximation algorithm is giv en in [7]. F ur ther work has considered heuristics or exact algorithms for the problem, see e.g. [12]. In the setting of geometric p roblems with imprecise p oints, L¨ offler and v an Kr ev eld ha ve studied the problem of computing the largest or smallest con vex hull ov er all p ossible lo cations of the p oin ts inside their uncertaint y areas [9]. Here, the option of up dating a p oin t do es not exist, and the goal is to design fast algorithms computing an extremal solution ov er all p ossib le c hoices of exact v alues of the input data. 280 T. ERLEBACH, M. HOFFMANN, D. KRIZANC, M. MIHAL’ ´ AK, AND R. RAMAN The remainder of the pap er is organized as follo ws. In Section 2, we define our p r oblems and int r o duce th e witness algorithm of [2] in general form . Sections 3 and 4 giv e our results for MSTs with edge and v ertex un certaint y , resp ectiv ely . 2. Preliminaries The mst-ed ge-uncer t aint y problem is defi ned as follo ws: Let G = ( V , E ) b e a connected, undirected, weig hted graph. Initially the edge wei ghts w e are u nkno wn ; instead, for eac h edge e an area A e is give n with w e ∈ A e . When up dating an edge e , the v alue of w e is rev ealed. The aim is to find (the edge set of ) an MS T for G with the least num b er of up d ates. In applications su c h as mobile ad-ho c net works it is natural to assu me the vertic es of our graph are em b edded in t wo or three d imensional space. This leads to the mst-ver te x- uncer t aint y problem defined as follo ws: Let G = ( V , E ) b e a connected, undir ected, w eigh ted graph. The v ertices corresp ond to p oints in E u clidean space. W e refer to the p oint p v corresp ondin g to a vertex v as its lo c ation . The weig ht of an edge is the Eu clidean distance b etw een the lo cations of its v ertices. Initially the lo cations of the v ertices are not kno wn; instead, for eac h v ertex v an area A v is given with p v ∈ A v , where p v is th e actual lo cation of vertex v . When a v ertex v is up dated, th e lo cation p v is rev ealed. Th e aim is to find an MST for G with th e least n u m b er of up dates. F ormally we are in terested in on-line up d ate problems o f the follo win g type: Eac h problem instance P = ( C, A, φ ) consists of an ordered set of data C = { c 1 , . . . , c n } , also called a configuration, and a fun ction φ suc h that φ ( C ) is the set of solutions for P . (The function φ is the same for all instances of a problem and can th us b e take n to repr esen t the problem.) A t the b eg inn ing th e set C is not kno wn to the algorithm; ins tead, an ord ered set of areas A = { A 1 , . . . , A n } is giv en, s uc h that c i ∈ C is an element of A i . The sets A i are called ar e as of unc ertainty or unc ertainty ar e as for C . W e say that an uncertain ty area A i that consists of a single element is trivial . F or example, in the mst-edge-uncer t a inty problem, C consists of the giv en graph G = ( V , E ) and its | E | actual edge w eight s. The ordered set of areas A sp ecifies the graph G exactl y (so we assu m e complete knowledge of G ) and, for eac h edge e ∈ E , con tains an area A e giving the p ossible v alues the weig ht of e ma y tak e. Then φ ( C ) is th e set of MSTs of the graph with edge weigh ts giv en by C , eac h tree rep r esen ted as a set of edges. F or a giv en set of u ncertain t y areas A = { A 1 , . . . , A n } , an area A i can b e up date d , w hic h rev eals the exact v alue of c i . After up dating A i , th e n ew ordered set of areas of un certaint y for C is { A 1 , . . . , A i − 1 , { c i } , A i +1 , . . . , A n } . Up dating all non-trivial areas would rev eal the configuration C and wo uld ob viously allo w us to calc u late an elemen t of φ ( C ) (under the natural assumption that φ is computable). The aim of the on-line algorithm is to minimize the num b er of up dates needed in order to compute an elemen t of φ ( C ). An algorithm is k -up date co mp etitiv e for a giv en prob lem φ if for ev ery p roblem instance P = ( C, A, φ ) the algorithm needs at most k · OPT + c up dates, wh ere c is a constan t and OPT is the minimum num b er of up date s needed to verify an elemen t of φ ( C ). (F or our algorithms w e can tak e c = 0, but our lo wer b oun ds apply also to the case w here c can b e an arbitrary constan t.) Note that the primary aim is to minimize the n umb er of u p dates needed to calculate a solution. W e d o not consider ru nning time or space r equirement s in detail, but note that our algorithms are clearly p olynomia l, p ro vided that one can obtain COMPUTING MINIMUM SP ANNING TRE E S WITH UNCER T AINTY 281 u v x y (1,3) (3,4) (3,5) (1,3) 2.3 (a) (b) u v x y (2,4) (3,4) 1.1 (1,3) 3.1 2.3 2.5 (1,3) 3.7 (3,5) Figure 1: (a) Ins tance of mst-edge-unc er t ainty (b) Up dating the edge { x, y } su ffi ces to verify an MS T if an elemen t of φ ( C ) can n ot b e calculated fr om A then find a witness set W up d ate all areas in W let A ′ b e th e areas of u ncertain t y after up dating W restart the algorithm with P ′ = ( C, A ′ , φ ) end if return an elemen t of φ ( C ) that can b e calculate d from A Figure 2: The general witness algorithm the infimum and supremum of an area in O (1) time, an assump tion w hic h holds e.g. if areas are op en interv als. As an example, consider the ins tance of mst-edge-unce r t ainty sho wn in Figure 1(a), where eac h edge is lab eled with its actual wei ght (in b old) and its un certain t y area (an op en in terv al). Up dating the edge { x, y } leads to the situation sho wn in Figure 1(b) and suffices to verify that the edges { u, y } , { u, v } and { x, y } form an MST regardless of the exact wei ghts of the edges that ha ve n ot yet b een up d ated. If no edge is up dated, one cannot exclude that an MST includes the edge { v , x } instead of { x, y } , as the former could hav e weigh t 3 . 3 and the latter we ight 3 . 9, f or example. Therefore, for the instance of mst-edge-unce r t ainty in Figure 1(a) the minimum num b er of up dates is 1. 2.1. The Witness Algorithm The witness algorithm for problems with un certain input was first introdu ced in [2]. This section describ es the witness algorithm in a more general setting and notes some of its prop erties. W e call W ⊆ A a witness set of ( A, φ ) if for ev ery p ossible configuration C (where c i ∈ A i ) no elemen t of φ ( C ) can b e verified without up d ating an elemen t of W . In other wo rd s, an y set of up d ates that suffices to v erify a solution m ust up date at least one area of W . The witness algorithm for a problem instance P = ( C, A, φ ) is shown in Figure 2. F or t wo ordered sets of areas A = { A 1 , A 2 , . . . , A n } and B = { B 1 , B 2 , . . . , B n } w e say that B is at least as narrow as A if B i ⊆ A i for all 1 ≤ i ≤ n . The f ollo w in g lemma is easy to pr o v e. Lemma 2.1. L et P = ( C , A, φ ) b e a pr oblem instanc e and B b e a narr ower set of ar e as than A . F urther let W b e a witness set of ( B , φ ) . Then W is also a witness set of ( A, φ ) . 282 T. ERLEBACH, M. HOFFMANN, D. KRIZANC, M. MIHAL’ ´ AK, AND R. RAMAN Theorem 2.2. If ther e is a glob al b ound k on the size of any witness set use d by the witness algorithm, then the witness algorithm is k - up date c omp etitive. Theorem 2.2 was pro ved in a slightly different setting in [2 ], b ut the pro of carries ov er to the present setting in a straightforw ard w a y by using Lemm a 2.1. 3. Minim um Spanning T rees w ith Edge Uncert ain t y In this section w e p resen t an algorithm u-re d for the problem mst-edge-uncer t ainty . In the case that all areas of un certain t y are either op en or trivial, algorithm u-red is 2- up d ate comp etitiv e, whic h we show is optimal. F u rthermore, we sho w that f or arb itrary areas of uncertaint y there is n o constan t u p date comp etit ive algorithm. First, let u s recall a w ell kno wn prop erty , u sually referred to as the r e d rule [ 11], of MSTs: Prop osition 3.1. L et G b e a weighte d gr aph and let C b e a cycle in G . If ther e exists an e dge e ∈ C with w e > w e ′ for al l e ′ ∈ C − { e } , then e is not in any MST of G . W e will use the follo wing n otations and definitions: A graph U = ( V , E ) with an area A e for eac h edge e ∈ E is called an e dge- unc ertainty gr aph . W e sa y a w eighte d graph G = ( V , E ) with edge weigh ts w e is a r e alization of U if w e ∈ A e for ev er y e ∈ E . No te th at w e is asso ciated with G and A e with U . W e also sa y th at an edge e is trivial if the area A e is trivial. F or an edge e in an edge-uncertain ty graph we denote the upp er limit of A e b y U e = sup A e and the lo wer limit of A e b y L e = inf A e . W e extend the n otion of an MS T to edge-uncertain t y graphs in the follo wing w ay: Let U b e an edge-uncertain t y graph. W e sa y T is an MST of U if T is an MST of ev ery realizat ion of U . Clearly not ev ery edge-uncertaint y graph has an MS T. Let C b e a cycle in U . W e sa y t h e edge e ∈ C is a n alw ays ma ximal edge in C if L e ≥ U c for all c ∈ C − { e } . Therefore in ev ery r ealizat ion G of U we hav e w e ≥ w c for all c ∈ C − { e } . Note that a cycle can ha v e more th an one alwa ys maximal edge and n ot eve ry cycle has an alw a ys maximal edge. The follo w in g lemma d eals with cycles of the latter k in d: Lemma 3.2. L et U b e an e dge-unc ertainty gr aph. L et C b e a cycle in U . L et C not have an always maximal e dge. Then for any f ∈ C with U f = max { U c | c ∈ C } we have that f is non-trivial and ther e exists an e dge g ∈ C − { f } with U g > L f . Pr o of. Let f ∈ C b e an edge with U f = max { U c | c ∈ C } . If L f = U f the edge f would b e alwa ys maximal. Hence L f m ust b e strictly smaller th an U f and f is non-trivial. Since there is no alw a ys maximal ed ge in C , we ha ve that L f < max { U c | c ∈ C − { f }} . Th erefore there exists at least one edge g in C − { f } with L f < U g . Prop osition 3.3. L et U b e an e dge-u nc ertainty g r aph with an MST T . L et f = { u, v } b e an e dge of U such that f 6∈ T . L et P b e the p ath in T c onne cting u and v , then U p ≤ L f for al l p ∈ P . Pr o of. Assume there exists a p ∈ P w ith U p > L f . Then there exists a r ealizat ion G of U with w p > w f . Hence by removing the edge p and adding the edge f to T we obtain a spanning tr ee th at is c heap er than T . So T is not an MST for G . Th is is a con tradiction since T is an MST of U and therefore of any realization of U . COMPUTING MINIMUM SP ANNING TRE E S WITH UNCER T AINTY 283 01 Ind ex all edges su c h that e 1 ≤ e 2 ≤ · · · ≤ e m . 02 Let Γ b e U without any edge 03 for i fr om 1 to m do 04 add e i to Γ 05 if Γ h as a cycle C then 06 if C con tains an alw a ys m aximal edge e t hen 07 delete e from Γ 08 else 09 let f ∈ C su ch that U f = max { U c | c ∈ C } 10 let g ∈ C − { f } such that U g > L f 11 up d ate f and g 12 restart the algorithm 13 end if 14 end if 15 end for 16 return Γ Figure 3: Alg orithm u-re d Our algorithm u-red applies the red rule to the giv en uncertaint y graph , but w e ha ve to b e careful ab out the order in wh ich edges are considered. The order w e use is as follo ws: Let U b e an edge-uncertain t y graph an d let e, f b e tw o edges in U . W e sa y e < f if L e < L f or ( L e = L f and U e < U f ), e ≤ f if e < f or ( L e = L f and U e = U f ). Edges with the same u p p er and lo w er w eigh t limit are order ed arbitrarily . Algorithm u-re d is sho wn in Figure 3. Observ e that: • In case no up date is made the algorithm u-red w ill p erform essentially Kru s k al’s algorithm [3]. When a cycle is cr eated there will b e an alwa ys maximal edge in that cycle. Due to the order in whic h the algo rithm adds th e edges to Γ the ed ge e i that closes a cycle C m ust b e an alwa ys maximal edge in C . So where K rusk al’s algorithm do es not ad d an edge to Γ when it would close a cycle, the u-red algorithm adds this edge to Γ but then d eletes it or an equally w eigh ted edge in the cycle from Γ. • B y Lemma 3.2 the edges f , g in line 9 and 10 exist and f i s n on -trivial. • The algorithm will termin ate. The algorithm either up dates at least one non-trivial edge f and restarts, or do es not p erform any up date s. Hence the algo rithm u-red will ev entually return an MST of G . • D ur ing the run of the algorithm the grap h Γ is either a forest or cont ains one cycle. In case the most recently added edge closes a cycle either one edge of the cycle will b e deleted or after s ome up dates the algorithm restarts and Γ has no edges. Hence at any giv en time there is at m ost one cycle in Γ. As the algorithm may restart itself, we say a run is completed if the algorithm restarts or return s the MST. In case of a restart, another ru n of the algorithm starts. Before showing that the algorithm u-red is 2-up date comp etitiv e under the restriction to op en or trivial areas, w e d iscuss s ome tec hnical preliminaries. In eac h run the algorithm considers all edges in a certain order e 1 , . . . , e m . During the run of the algorithm w e refer to the currently considered edge as e i . Let u and v b e t wo distinct vertic es. In case u and v are in the same connected comp onen t of the subgraph with edges e 1 , . . . , e i − 1 , then 284 T. ERLEBACH, M. HOFFMANN, D. KRIZANC, M. MIHAL’ ´ AK, AND R. RAMAN they are also connected in the curren t Γ. F ur thermore, we need some p rop erties of a path connecting u and v in Γ und er certain conditions. The n ext t wo lemmas establish these prop erties. T h ey are tec hnical and are s olely needed in the pr o of of Lemma 3.6. Lemma 3.4. L et h = { u, v } and e b e two e dges in U . L e t h 6 = e and L h < U e . L et the algorithm b e i n a state such that h has b e en c onsider e d. Then u and v ar e c onne cte d in the curr ent Γ − { e } . Pr o of. If the ed ge h is in the current Γ then clearly u and v are connected in Γ − { e } , so assume that h is no longer in Γ. Th erefore it must ha v e b e en an alwa ys maximal edge in a cycle C . In order for h to b e an alwa ys maximal edge in C w e must ha ve that L c ≤ U c ≤ L h for all c ∈ C − { h } . So since L h < U e w e hav e that L c < U e . Also the edge h can n ot b e an alw a ys m aximal edge in C if C con tains e . Clearly C − { h } is a path in U connecting u and v and do es not con tain e . Sin ce the edges in C − { h } might ha v e b een deleted from the curr en t Γ themselve s we ha ve to u se this argumen t rep eatedly , but even tu ally w e get a path in the cur ren t Γ − { e } connecting u and v . The n ext lemma follo ws directly fr om Lemma 3.4. Lemma 3.5. L et u, v b e vertic es and e b e an e dge in U . L et P b e a p ath in U − { e } c onne cting u and v with L p < U e for al l p ∈ P . L et the algorithm b e in a state such that al l e dges of P have b e en c onsider e d, then ther e exists a p ath P ′ in the curr ent Γ c onne cting u and v with e 6∈ P ′ . Lemma 3.6. Assume that al l unc ertainty ar e as ar e op en or trivial. The e dges f and g as describ e d in the algorithm u -red at line 9 and 10 form a witness set. Pr o of. W e ha v e the follo win g situation: There exist a cycle C in Γ with no alwa ys maximal edge. Let m = max { U c | c ∈ C } . The edges f and g are in C with U f = m and U g > L f . By Lemm a 3.2 the area A f is n on-trivial. W e n o w assume that the set { f , g } is not a witness set. So w e can up date some edges, but not f or g suc h that the r esulting edge-uncertain t y grap h U ′ has an MST T . Let U ′ e and L ′ e denote the up p er and lo wer limit of an area for an edge e with regard to U ′ . Since b oth edges f and g are n ot up dated we note that L f = L ′ f , U f = U ′ f , L g = L ′ g , U g = U ′ g . Since all areas in U ′ and U are either trivial or op en, and C has no alw a ys maximal edge, the weig ht of ev ery edge in C m ust b e less than m . In particular w e hav e that for all c ∈ C U ′ c < m or L ′ c < U c = m. Since U f = m there exists a realization G ′ of U ′ and U , wh ere the w eigh t of f is greater than the we ight of an y other ed ge in C . By Prop ositio n 3.1 the edge f is not in any MST of G ′ and therefore also not in T . Let u and v b e the ve r tices of f . By Prop osition 3.3 there exists a path P in U ′ connecting u and v with U ′ p ≤ L f for all p ∈ P . Since U g > L f and neither f nor g are up d ated the edge g is not in the path P . W e n o w argue th at all edges of P m us t h a v e b een already considered by the algorithm. F or this w e lo ok at th e follo win g tw o cases: Case 1) Let p ∈ P and L ′ p < L f . Since L p ≤ L ′ p w e ha ve that L p < L f . COMPUTING MINIMUM SP ANNING TRE E S WITH UNCER T AINTY 285 Case 2) Let p ∈ P and L ′ p = L f . S ince U ′ p ≤ L f w e ha ve th at L ′ p = U ′ p = L f . Either the area A p is also trivial ( L p = U p = L ′ p = U ′ p = L f ) or A p is op en and contai n s the p oint L ′ p , in this case L p < L ′ p . So for all p ∈ P w e ha ve L p < L f or L p = U p = L f < U f . Therefore all edges of P will b e considered b efore f . W e also note that L p ≤ L ′ p ≤ L f < U g for all p ∈ P . By Lemm a 3.5 there exists a p ath P ′ in Γ connecting u and v an d g 6∈ P ′ . Hence Γ has tw o cycles, whic h is a con tradiction. Using T heorem 2.2, th is leads directly to the follo wing r esult. Theorem 3.7. Under the r estriction to op en and trivial ar e as the algorithm u-red is 2 - up date c omp etitive. W e r emark that the analysis of algo r ith m u-red actually works also in the more general setting where it is only required that ev ery area is trivial or satisfies the follo wing condition: the area con tains neither its infimum n or its suprem um . It remains to sho w that un der the restriction to op en and trivial areas there is no algorithm for the mst-edge -uncer t ainty problem th at is (2 − ǫ )-up date comp et itive . b c a 1 (3,7) (5,9) 1 1 1 1 Figure 4: Lo wer b o u nd construction Example 3.8. The graph G displa ye d in Figure 4 consists of a path and, for eac h verte x of the p ath, a gadget connected to that v ertex. Each gadget is a triangle with sid es a, b and c and areas A a = { 1 } , A b = (3 , 7) and A c = (5 , 9). In eac h gadget a and either b or c are part of the minim um sp anning tree. If the algorithm up dates b we let the weig ht of b b e 6. S o c needs to b e up date d , which reve als a wei ght for c of 8. Ho we ver, by up d ating only c the edge b would b e part of the min imum sp anning tree regardless of its exact weig ht. If the algorithm u p dates c first, we let the weig ht of c b e 6. The necessary up date of b rev eals a wei ght of 4, and up d ating only b w ould ha v e b ee n enough. So in eac h gadget eve r y algorithm mak es t w o up dates where only one is needed b y OPT . Hence no deterministic algorithm is (2 − ǫ )-up date comp etitiv e. The follo wing example shows that withou t restrictions on the areas there is no algorithm for the mst-ed ge-uncer t ainty problem th at is constant u p date comp etiti ve. Example 3.9. Figure 5(a) sho ws an example of an edge-uncertaint y graph for whic h no algorithm can b e constant up date competitiv e. The minim um spann ing tree consists of all edges incident with u and all edges inciden t with v plus one more edge. Let us assum e the w eigh t of one of the remaining k = ( n − 2) / 2 edges is 2 and the w eigh t of the others is 3. An y algo r ith m would need to up d ate these edges un til it find s the edge with weig ht 2. Th is in the worst case could b e the last edge and k up d ates were made. Ho wev er OPT will only up d ate the edge with weigh t 2 and therefore OPT = 1. 286 T. ERLEBACH, M. HOFFMANN, D. KRIZANC, M. MIHAL’ ´ AK, AND R. RAMAN 1 v u 1 1 1 [2,4] [2,4] [2,4] [2,4] [2,4] [2,4] (2,4] (2,4] (2,4] (2,4] (2,4] (2,4] (2,4] (a) (b) Figure 5: Non-e xistence of constan t u p date competitiv e algorithms Note that this example actually sho ws that there is n o algorithm that is b etter then ( n − 2) / 2-up date comp et itive , where n is the num b er of ve r tices of the giv en graph. By adding edges with uncertain ty area [2 , 4] suc h that the neighbors of u and th e neigh b ors of v form a complete bip artite graph, w e ev en get a low er b ound of Ω( n 2 ). The construction in Example 3.9 works also if the in terv als [2 , 4] are replaced b y half- op en inte rv als [2 , 4). Thus, the example d emonstrates that with closed lo wer limits on the areas there is no constan t up date comp etitiv e algorithm for th e mst-edge-uncer t ainty problem. Th e follo wing example do es the s ame for closed u p p er limits. Example 3.10. The graph sh o wn in Figure 5(b) is one big cycle with k e d ges and the uncertain ty area of eac h edge is (2 , 4]. Let us assume exactly one edge e h as we ight 4 and the others are of we ight 3. In the worst case an y algorithm has to u p date all k ed ges b efore finding e . Ho wev er O PT is 1 by jus t up d ating e . 4. Minim um Spanning T ree with V ertex Uncertain ty In this s ection w e consider the mod el o f vertex- u n certain t y graphs. The mo dels of v ertex-uncertain ty and edge-uncertaint y are closely related. Clearly a verte x un certain t y graph U has an asso ciated edge-uncertain t y graph ¯ U where the area for eac h edge e = { u, v } is determined b y the com binations of p o ss ib le lo cations of u and v in U , i.e., the areas ¯ A in ¯ U are defi n ed as ¯ A { u,v } = { d ( u ′ , v ′ ) | u ′ ∈ A u , v ′ ∈ A v } . An up date of an edge e = { u, v } in ¯ U can b e p erformed (sim ulated) b y up dating u and v in U ; these tw o v ertex up dates migh t also reve al additional information ab out the we ights of other edges in ciden t with u or v . F urthermore, note that if n either of the tw o vertices u and v in U is up dated, n o information ab out the wei ght of e can b e obtained. Thus, w e get: Lemma 4.1. L et φ b e a gr aph pr oblem such tha t the set o f solutions for a given e dge- weighte d gr aph G = ( V , E ) dep ends only on th e gr aph and the e dge weights (but not t he lo c ations of the vertic es). L et U b e a vertex-unc ertainty gr aph that is an instanc e of φ . If ¯ W ⊆ E is a witness set for ¯ U , then W = S { u,v }∈ ¯ W { u, v } is a witness set for U . Using T heorem 2.2 w e obtain the follo wing r esult. Theorem 4.2. L et φ b e a gr aph p r oblem such that the set of solutions for a given e dge- weighte d gr aph dep ends only on the gr aph and the e dge weig hts (bu t not the lo c ations of COMPUTING MINIMUM SP ANNING TRE E S WITH UNCER T AINTY 287 the vertic es). L et A b e a k -u p date c omp etitive algorithm for the pr oblem φ with r esp e ct to e dge-unc ertainty gr aphs. If A is a witness algorithm, then by simulating an e dge up date by up dating b oth its endp oints the algorithm A is 2 k -up date c omp etitive for vertex- unc ertainty gr aphs. By stand ard prop erties of Euclidean top ology , the follo wing lemma clearly holds. Lemma 4.3. L et U b e a vertex unc ertainty gr aph with only trivial or op en ar e as. Then ¯ U also has only trivial or op en ar e as. Theorem 4.4. U nder the r estriction to trivial o r op en ar e as the algorithm u-red is 4 - up date c omp etitive for the m st-ver tex -uncer t ainty pr oblem, which is optima l. Pr o of. Com bining Theorems 3.7 and 4.2 together with Lemma 4.3, we get that u-red is 4-up date comp eti tive for the mst-ver te x-uncer t a inty problem when restricted to trivial or op en areas. It remains to sh o w that this is optimal. C A 2 2 4 B 2 2 D 7 C A 2 2 4 B 2 2 D 7 (a) (b) Figure 6: (a) Lo w er b ound construction (b) Ed ges that are in an y min im um spann ing tree W e show that no algorithm can b e b etter than 4-up date comp etitiv e. In Figure 6(a) we giv e a construction in the Euclidean plane for w hic h an y algorithm can b e forced to mak e 4 up d ates, while OPT is 1. The blac k d ots on the left and right repr esen t trivial areas. The distance b et ween t w o neigh b oring trivial areas is 1. There are four non-trivial areas A, B , C and D . Eac h of these areas is a long, thin op en area of length 2 and small p osit ive width . The distance b et wee n eac h non -trivial area and its closest trivial area is 1 as w ell. Let G b e th e complete graph w ith one v ertex for eac h of the trivial and non-trivial areas. Indep enden t of the exact locations of the v ertices in the non-trivial areas A, B , C and D , the edges indicated in Figure 6(b) must b e part of an y MST. Note that th e d istance b et ween the vertex of a n on-trivial area and its trivial neigh b or is in (1 , 3) and thus less than 3. W e no w consid er the distances b etw een th e non-trivial areas. W e let d ( X , Y ) b e the area of all p ossible distances b et ween tw o vertex areas X and Y . So d ( A, B ) = (7 , 11), d ( C, D ) = (4 , 8). Note that the distance b et we en the v ertices in A and D and the d istance b et ween the v ertices in B and C are greater than 8, s o either the edge AB or the edge C D is part of th e minimum spanning tree. Ev ery algorithm will up date the areas A, B , C and D in a certain order until it is clear that either the distance b et we en the v ertices of A and B is smaller or equal to the distance b et ween the v ertices of C and D , or vice v ersa. In order to force the algorithm to up d ate all four areas, we let the lo cations of the v ertices rev ealed in an y of the first 3 up dates made b y the algorithm b e as follo ws: 288 T. ERLEBACH, M. HOFFMANN, D. KRIZANC, M. MIHAL’ ´ AK, AND R. RAMAN • A or D : the verte x will b e located far to the righ t, • B or C : th e vertex will b e lo ca ted far to the left. Here, ‘far to the r igh t’ or ‘far to the left’ means that the lo c ation is v ery close (distance ε > 0, for s ome small ε ) to the r igh t or left end of th e area, resp ective ly . W e show that it is imp ossible for the algorithm to outpu t a correct minimum spann ing tree after only three up date s. Consid er the situation after the algo rith m has up dated three of the four non-trivial areas. Sin ce the c hoice of the lo cations of the ve r tices in the areas is indep end en t of the s equ ence of up dates, w e h a v e to consider four cases dep en d ing on whic h of the f our areas has not y et b ee n up dated. W e use A ′ , B ′ , C ′ and D ′ to refer to the areas A, B , C and D after they h a v e b een up dated. If the area A is the only area that has not yet b een up date d , we ha v e th at d ( A, B ′ ) = (7 + ǫ, 9 + ǫ ) and d ( C ′ , D ′ ) = { 8 − 2 ǫ } . Clearly the area A needs to b e up d ated. By h a ving the v ertex of area A on the far left, up d ating only area A in stead of the areas B , C, D r esults in d ( A ′ , B ) = (9 − ǫ, 11 − ǫ ) and d ( C, D ) = (4 , 8). Hence OPT wo uld only up date the area A and kn o w that th e edge AB is n ot part of the minimum spanning tree. The other three cases are similar. So f or the construction in Figure 6(a), no algo rithm can guarantee to mak e less than 4 up dates ev en though a single u p date is enough for the optim um. F u rthermore, we can create k disjoint copies of the construction and conn ect them u sing lines of trivial areas spaced 1 apart. A s long as the copies are sufficien tly far apart, they will n ot interfere with eac h other. Hence, for a graph with k copies there is n o algorithm that can guaran tee less th an 4 k up dates when at the s ame time OPT = k . References [1] I. Aron and P . V an Hentenryck. O n th e complexity of the robust spanning tree problem with interv al data. Op er ations R ese ar ch L etters , 32(1):36–40, 2004. [2] R. Bruce, M. Hoffmann, D. Krizanc, and R. Raman. Efficient upd ate strategies for geometric computing with uncertaint y . The ory of Computing Systems , 38(4):411–423, 2005. [3] T. H . Cormen, C. E. Leiserso n, R. L. Rivest, C. Stein. Intr o duction to Algor i thms . MI T Press, 2001. [4] T. F eder, R. Mot wani, L. O’Callaghan, C. Olston, and R. Panigra hy . Computing shortest paths with uncertaint y . Journal of A lgorithms , 62(1):1–18, 2007. [5] T. F eder, R. Mot wani, R. P anigrahy , C. Olston, and J. Widom. Computing the median with uncertaint y . SIAM Journal on Computing , 32(2):538–547, 2003. [6] S. Kah an . A model for data in motion. In Pr o c e e dings of the 23r d An nual A CM Symp osium on The ory of Computing (STOC’91) , pp. 267–277, 1991. [7] A. K asperski and P . Zieli ´ nski. An approxima tion algorithm for interv al data minmax regret com bina- torial optimization problems. Information Pr o c essing L etters , 97(5):17 7–180, 2006. [8] S. Khanna and W.-C. T an. On computin g fun ctions with uncertaint y . In Pr o c e e di ngs of the 20th Sym- p osium on Pri nciples of Datab ase Systems (PODS’01) , pp. 171–18 2, 2001. [9] M. L¨ offler and M. J. v an Kreveld. Largest and smallest tours and convex hulls for imprecise points. In 10th Sc and. Workshop on Algorithm The ory (SW A T’06) , LNCS 4059, pp. 375–3 87. Springer, 2006. [10] C. Olston and J. Widom. Offering a precision-p erformance tradeoff for aggre gation queries over repli- cated d ata. I n Pr o c. 26th Intern. Confer enc e on V ery L ar ge Data Bases (VLDB’00) , pp. 144–15 5, 2000. [11] R . E. T arjan. Data structur es and network al gorithms . SIAM, Philadelphia, P A, 1983 . [12] H . Y aman, O. Karasan, and M. Pinar. The robust spanning tree problem with interv al d ata. Op er ations R ese ar ch L etters , 29(1):31–40, 2001. This wo rk is lice nsed u nder the Cr eative Commons Attr ibution-NoDer ivs License. T o view a copy of this license, visit http: //creativ ecomm ons.org/licenses/by- n d/3.0/ .
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment