The Use of Domination Number of a Random Proximity Catch Digraph for Testing Spatial Patterns of Segregation and Association
Priebe et al. (2001) introduced the class cover catch digraphs and computed the distribution of the domination number of such digraphs for one dimensional data. In higher dimensions these calculations are extremely difficult due to the geometry of th…
Authors: E. Ceyhan, C. E. Priebe
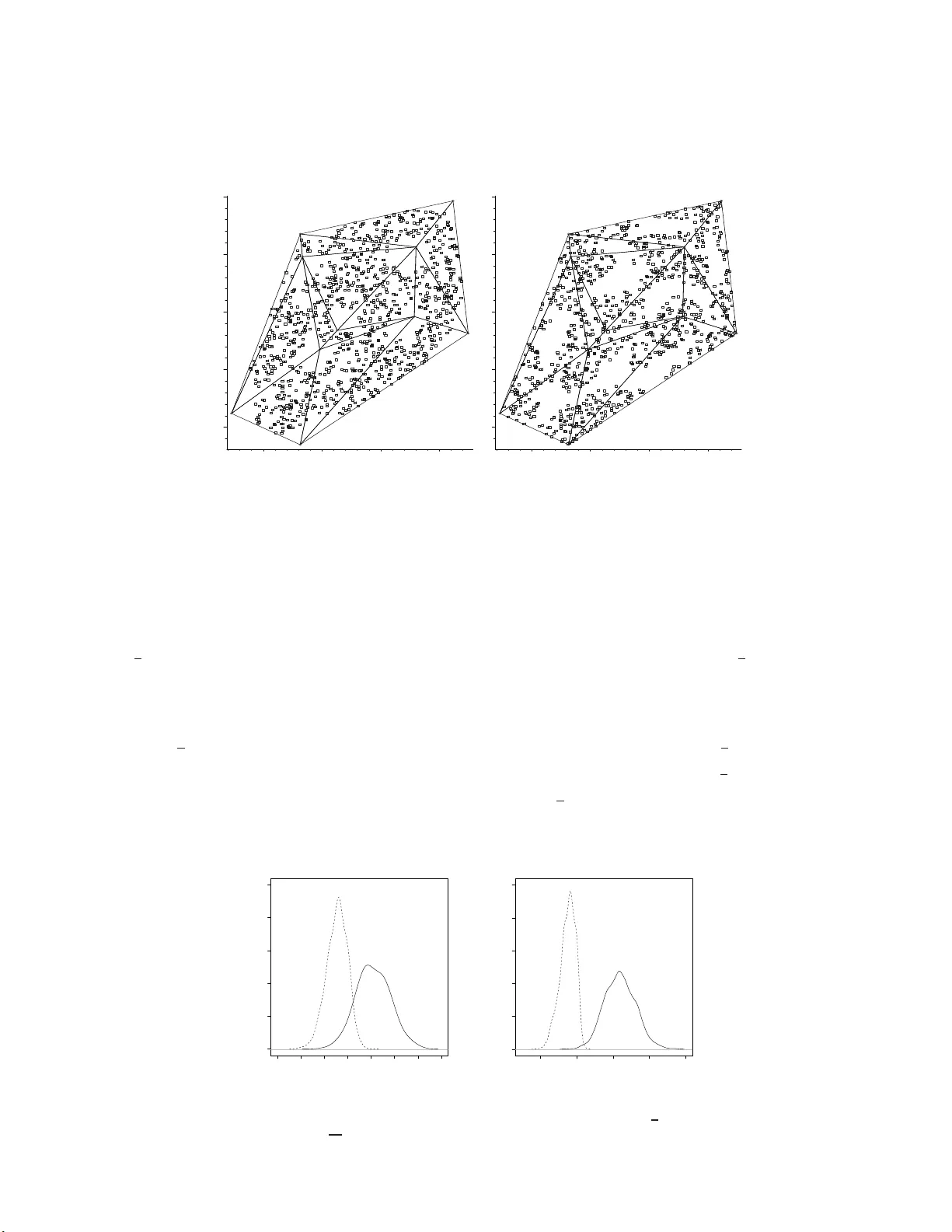
The Use of Domination Num b er of a Random Pro ximi t y Catc h Digraph for T esting Spatial P atterns of Segregation and Asso ciatio n ⋆ Elvan Ceyhan & Car ey E. Prie b e Johns Hopkins University, Baltimor e No v ember 14, 2018 Abstract Priebe et al. (2001) introduced the class cover c atch digraphs and computed the distribution of the domination num b er of such digraphs for one dimensional data. In higher d imensions these calculations are extremely difficult d ue to the geometry of th e proximit y regions; and only upp er-b ou n ds are av ailable. In th is article, we introdu ce a new type of data-rand om proximit y map and the asso ciated (di)graph in R d . W e fin d the asymptotic d istri bution of the domination number and u se it for testing spatial p oin t patterns of segregation and asso ciati on. Keywor ds: Random digraph; Domination num b er; Proximit y Map; Spatial Poin t Pattern; Segregation; Asso ciation; Dela unay T riangulation ⋆ This research was supp orted b y the Defense Adv anced Research Pro jects Agency as a dministered by the Air F orce Office of Scientific Research under contract DOD F49620 -99-1-021 3 and b y Office of Nav al Research Grant N000 14-95-1- 0777. Corresp onding author . E-mail addr ess: cep@jh u.edu (C.E. P r iebe) 1 1 In tro duction In a digr aph D = ( V , A ) with v ertex set V and arc (dire c ted edge) set A , a vertex v dominates itself and all vertices of the for m { u : v u ∈ A} . A dominating set , S D , for the digra ph D is a subset of V suc h that each vertex v ∈ V is dominated by a vertex in S D . A minimum dominating set , S ∗ D , is a dominating s et of minimum ca rdinalit y; and the domination n umb er , γ ( D ), is defined as γ ( D ) := | S ∗ D | , where | · | is the cardinality functional ([W es t, 20 01 ]). If a minimum dominating set is of size one, we call it a dominating p oint . Let (Ω , M ) be a measur able s pace a nd consider a function N : Ω × 2 Ω → 2 Ω , where 2 Ω represents the power set of Ω. Then given Y ⊆ Ω, the pr oximity map N Y ( · ) = N ( · , Y ) : Ω → 2 Ω asso ciates with each po in t x ∈ Ω a pr oximity re gion N Y ( x ) ⊂ Ω. The regio n N Y ( x ) dep ends on the distance b et ween x and Y . F or B ⊆ Ω, the Γ 1 -r e gion , Γ 1 ( · ) = Γ 1 ( · , N Y ) : Ω → 2 Ω asso ciates the region Γ 1 ( B ) := { z ∈ Ω : B ⊆ N Y ( z ) } with each set B ⊆ Ω. F o r x ∈ Ω, we denote Γ 1 ( { x } ) as Γ 1 ( x ). If X n = { X 1 , X 2 , · · · , X n } is a set of Ω-v alued random v ariables , then the N Y ( X i ) (and Γ 1 ( X i )), i = 1 , · · · , n are ra ndom sets. If the X i are indep enden t a nd ident ically distributed, then so are the random sets N Y ( X i ) (and Γ 1 ( X i )). F urther more, Γ 1 ( X n ) is a r andom set. Notice that Γ 1 ( X n ) = ∩ n j =1 Γ 1 ( X j ), sinc e x ∈ Γ 1 ( X n ) iff X n ⊆ N Y ( x ) iff X j ∈ N Y ( x ) for all j = 1 , . . . , n iff x ∈ Γ 1 ( X j ) for all j = 1 , . . . , n iff x ∈ ∩ n j =1 Γ 1 ( X j ). Consider the data -random proximity catch digra ph D with vertex set V = X n and ar c se t A defined b y ( X i , X j ) ∈ A ⇐ ⇒ X j ∈ N Y ( X i ). The random digraph D dep ends on the (joint) distribution o f the X i and on the map N Y (see Pr iebe et al. (2001) and Prieb e et a l. (2 003)). The adjective pr oximity — for the ca tc h digraph D and for the map N Y — comes fro m thinking of the region N Y ( x ) as repre s en ting those p oin ts in Ω “clo s e” to x (see, e.g., T oussa int (198 0 ) and Jar omczyk and T ouss ain t (19 92)). F or X 1 , · · · , X n iid ∼ F the domination num b er of the a ssocia ted da ta-random proximit y catch digraph D , deno ted γ ( X n ; F, N Y ), is the minimum n umber of p oin ts that dominate all p oints in X n . Note that, γ ( X n ; F, N Y ) = 1 iff X n ∩ Γ 1 ( X n ) 6 = ∅ . The ra ndom v aria ble γ n := γ ( X n ; F, N Y ) depends on X n explicitly , a nd on F and N Y implicitly . In general, the exp ectation E [ γ n ], dep ends o n n , F , and N Y ; 1 ≤ E [ γ n ] ≤ n ; and the v ar iance of γ n satisfies, 0 ≤ V ar [ γ n ] ≤ n 2 / 4. W e can also define the reg ions asso ciated with γ n = k for k ≤ n . F o r insta nce, the Γ 2 -region for proximity map N Y ( · ) and set B ⊂ Ω is Γ 2 ( B ) = { ( x, y ) ∈ [Ω \ Γ 1 ( B )] 2 : B ⊆ N Y ( x ) ∪ N Y ( y ) } . In general, Γ k ( B ) = { ( x 1 , x 2 , . . . , x k ) ∈ Ω k : B ⊆ ∪ k j =1 N Y ( x j ) and all p ossible m -p ermut ations ( u 1 , u 2 , . . . , u m ) of ( x 1 , x 2 , . . . , x k ) satisfy ( u 1 , u 2 , . . . , u m ) 6∈ Γ m ( B ) for each m = 1 , 2 , . . . , k − 1 } . 2 A Class of P ro ximit y Maps and the Corresp onding Γ 1 -Regions Let Ω = R 2 and let Y = { y 1 , y 2 , y 3 } ⊂ R 2 be thr ee non-co llinear po in ts. Denote by T ( Y ) the triangle —including the interior— formed by these three points. The most s traigh tforward extension of the data random proximity catch digraph introduced by Prieb e et al. (2001) is the spherical pr o ximit y map N S ( x ) = B ( x, r ( x )) which is the ball centered at x with radius r ( x ) = min y ∈Y d ( x, y ) or the a rc-slice proximity map N AS ( x ) = B ( x, r ( x ) ) ∩ T ( Y ). How ever, b oth case s suffer from the intractabilit y o f the Γ 1 -region a nd hence the intractability of the finite and asymptotic distribution of γ n . W e pr opose a new clas s of pr o x imit y regio ns which do es not suffer fro m this drawback. F or r ∈ [1 , ∞ ] define N r Y to b e the r-factor pr oximity map and Γ r 1 to b e the corresp onding Γ 1 -region as follows; see also Fig ur es 1 a nd 2. Let “ v er tex regions ” R ( y 1 ), R ( y 2 ), R ( y 3 ) partition T ( Y ) using seg - men ts from the cen ter of mass of T ( Y ) to the edge midp oints. F or x ∈ T ( Y ) \ Y , let v ( x ) ∈ Y b e the 2 vertex whos e reg ion contains x ; x ∈ R ( v ( x )). If x falls on the b oundary of tw o vertex regions, we assign v ( x ) ar bitrarily . Let e ( x ) be the edge of T ( Y ) opp osite v ( x ). Le t ℓ ( v ( x ) , x ) b e the line para lle l to e ( x ) through x . Let d ( v ( x ) , ℓ ( v ( x ) , x )) b e the Euclidean (p e r pendicular) distance from v ( x ) to ℓ ( v ( x ) , x ). F or r ∈ [1 , ∞ ) let ℓ r ( v ( x ) , x ) be the line pa rallel to e ( x ) such that d ( v ( x ) , ℓ r ( v ( x ) , x )) = rd ( v ( x ) , ℓ ( v ( x ) , x )) a nd d ( ℓ ( v ( x ) , x ) , ℓ r ( v ( x ) , x )) < d ( v ( x ) , ℓ r ( v ( x ) , x )). Let T r ( x ) be the triangle s imila r to and with the same o ri- ent ation as T ( Y ) having v ( x ) a s a vertex and ℓ r ( v ( x ) , x ) as the opp osite edge. Then the r-factor proximit y region N r Y ( x ) is defined to b e T r ( x ) ∩ T ( Y ). T o define the Γ 1 -region, let ξ j ( x ) b e the line suc h that ξ j ( x ) ∩ T ( Y ) 6 = ∅ and r d ( y j , ξ j ( x )) = d ( y j , ℓ ( y j , x )) for j = 1 , 2 , 3 . Then Γ r 1 ( x ) = ∪ 3 j =1 Γ r 1 ( x ) ∩ R ( y j ) where Γ r 1 ( x ) ∩ R ( y j ) = { z ∈ R ( y j ) : d ( y j , ℓ ( y j , z )) ≥ d ( y j , ξ j ( x ) } , for j = 1 , 2 , 3 . No tice that r ≥ 1 implies x ∈ N r Y ( x ) and x ∈ Γ r 1 ( x ). F ur thermore, lim r →∞ N r Y ( x ) = T ( Y ) and lim r →∞ Γ r 1 ( x ) = T ( Y ) for all x ∈ T ( Y ) \ Y , and s o we define N ∞ Y ( x ) = T ( Y ) and Γ ∞ 1 ( x ) = T ( Y ) for all such x . F or x ∈ Y , we define N r Y ( x ) = { x } for all r ∈ [1 , ∞ ]. Notice that X i iid ∼ F , with the additional as sumption that the non- de g enerate tw o -dimensional probability density function f exists with supp ort( f ) ⊆ T ( Y ), implies tha t the s pecial case in the construction of N r Y — X falls o n the bo undary of tw o vertex r egions — o ccurs with proba bilit y zer o. Note that for such an F , N r Y ( x ) is a triangle a.s. and Γ r 1 ( x ) is a s ta r-shape d p olygon (not neces sarily conv ex). y 1 = v ( x ) x M C ℓ ( v ( x ) , x ) ℓ 2 ( v ( x ) , x ) y 3 e ( x ) y 2 d ( v ( x ) , ℓ 2 ( v ( x ) , x )) = 2 d ( v ( x ) , ℓ ( v ( x ) , x )) d ( v ( x ) , ℓ ( v ( x ) , x )) Figure 1: Construction o f r -factor proximit y regio n, N 2 Y ( x ) (shaded region). Let X e := a rgmin X ∈X n d ( X, e ) b e the (closest) edge extremum for edge e . Then Γ r 1 ( X n ) = ∩ 3 j =1 Γ r 1 ( X e j ), where e j is the edge opp osite vertex y j , for j = 1 , 2 , 3 . So Γ r 1 ( X n ) ∩ R ( y j ) = { z ∈ R ( y j ) : d ( y j , ℓ ( y j , z ) ≥ d ( y j , ξ j ( X e j )) } , for j = 1 , 2 , 3. Let the domination num b er b e γ n ( r ) := γ n ( X n ; F, N r Y ) and X [ j ] := arg min X ∈X n ∩ R ( y j ) d ( X, e j ). Then γ n ( r ) ≤ 3 with probability 1, since X n ∩ R ( y j ) ⊂ N r Y ( X [ j ] ) for each j = 1 , 2 , 3. Thus 1 ≤ E [ γ n ( r )] ≤ 3 and 0 ≤ V ar [ γ n ( r )] ≤ 9 / 4 . 3 y 1 y 3 ℓ ( y 1 , x ) x ξ 3 (2 , x ) ξ 2 (2 , x ) d ( y 1 , ℓ ( y 1 , x )) = r d ( y 1 , ξ 1 (2 , x )) d ( y 1 , ξ 1 (2 , x )) ξ 1 (2 , x ) y 2 M C Figure 2: Construction o f the Γ 1 -region, Γ 2 1 ( x ) (shaded r e g ion). 3 Null Distribution of Domination Num b er The nu ll hypothesis for spatia l patterns hav e been a co n traversial topic in eco logy from the ear ly days. [Gotelli and Graves, 1996] hav e collected a voluminous literature to present a compr ehensiv e analysis o f the use and misuse of null mo dels in eco logy comm unit y . They also define and attempt to clarify the null mo del concept as “a pattern-ge nerating mo del that is based on ra ndomization o f ecolo gical data or random sampling from a known o r imagined distr ibution. . . . The ra ndo mization is designed to pro duce a pa ttern that w ould be exp ected in the absence of a par ticular ecolo gical mechanism.” In other words, the h yp othesized null mo dels can b e viewed as “ tho ugh t exp eriment s,” which is conv ent ially us ed in the physical sciences , and these mo dels pr o vide a statistical baseline fo r the analysis o f the pa tterns. F or statistical testing, the nu ll hypothesis we cons ider is a type o f c omplete sp atial r andomness ; that is, H 0 : X i iid ∼ U ( T ( Y )) where U ( T ( Y )) is the unifor m dis tribution on T ( Y ). If it is desired to hav e the sample size b e a random v ariable, we may consider a spa tial Poisson p oint pro cess on T ( Y ) as our null hypothesis. W e first present a “g eometry inv ar iance” r esult which allows us to a ssume T ( Y ) is the s tandard eq uila teral triangle, T (0 , 0) , (1 , 0) , 1 / 2 , √ 3 / 2 , thereby simplifying our subsequent analysis. Theorem 1 : Let Y = { y 1 , y 2 , y 3 } ⊂ R 2 be three non-collinear p oin ts. F or i = 1 , · · · , n , let X i iid ∼ F = U ( T ( Y )), the unifor m distr ibutio n o n the triangle T ( Y ). Then for any r ∈ [1 , ∞ ] the distribution of γ ( X n ; U ( T ( Y )) , N r Y ) is indep enden t o f Y , and hence the geo metry of T ( Y ). Pro of: A comp osition of tra nslation, r otation, re fle c tio ns, a nd sca ling will ta k e a n y given triang le T o = T ( { y 1 , y 2 , y 3 } ) to the “ basic” tr iangle T b = T ( { (0 , 0) , (1 , 0) , ( c 1 , c 2 ) } ) with 0 < c 1 ≤ 1 / 2, c 2 > 0 a nd (1 − c 1 ) 2 + c 2 2 ≤ 1, preserving uniformity . The transfor ma tion φ e : R 2 → R 2 given by φ e ( u, v ) = u + 1 − 2 c 1 √ 3 v , √ 3 2 c 2 v takes T b to the e quilateral tr iangle T e = T ( { (0 , 0) , (1 , 0) , (1 / 2 , √ 3 / 2) } ). Inv es tig ation of the Jaco bian shows that φ e also pre serv es uniformity . F urther mo re, the comp osition of φ e with the r igid motion transforma tio ns maps the b oundary of the orig inal tr iangle, T o , to the b oundary of the equilater al tr iangle, T e , the median lines of T o to the median lines of T e , a nd lines para llel to the edges of T o to lines par allel to the edg es of T e . 4 k n 10 20 30 40 50 60 70 80 90 100 200 300 1 151 82 61 6 7 50 24 29 21 15 27 10 7 2 602 636 688 670 693 714 739 7 08 723 718 715 730 3 247 282 251 263 257 262 232 2 71 262 255 275 263 T able 1: The num b e r o f γ n (3 / 2) = k out of N = 100 0 replicates. Since the distribution of γ ( X n ; U ( T ( Y )) , N r Y ) inv o lves only pro babilit y co n tent o f unions and intersections of r egions b ounded by precisely such lines, and the pro babilit y conten t of such re g ions is pr eserved since uniformity is pr eserv ed, the desired result follows. Based on Theorem 1 and our unifor m null hypothesis, w e may assume that T ( Y ) is a standard equilater a l triangle with Y = { (0 , 0 ) , (1 , 0) , (1 / 2 , √ 3 / 2) } henceforth. F or our r -factor proximity map and uniform n ull h yp othesis, the asymptotic n ull distribution of γ n ( r ) := γ ( X n ; U ( T ( Y )) , N r Y ) ca n be der iv ed as a function o f r . W e denote by ς r Y := { z ∈ T ( Y ) : N r Y ( z ) = T ( Y ) } the sup erset r e gion ass ociated with N r Y in T ( Y ). Notice tha t ς r Y ⊆ Γ r 1 ( X n ) for all r and X n ∩ ς r Y 6 = ∅ implies that γ n ( r ) = 1 . Prop osition 1: The exp ected area of the the Γ 1 -region, E [ A (Γ r 1 ( X n ))], c o n verges to the area of the sup e rset reg ion, A ( ς r Y ), as n → ∞ . In pa rticular, E [ A (Γ 3 / 2 1 ( X n ))], go es to zero at r ate O ( n − 2 ) as n → ∞ . Pro of: See App endix. As a co rollary to the ab o ve prop osition, we hav e that E [ A (Γ r 1 ( X n ))] → A ( ς r Y ) = 0 for r ∈ [1 , 3 / 2] as n → ∞ . Additionally , E [ A (Γ r 1 ( X n ))] → A ( ς r Y ) = (1 − 3 / (2 r )) 2 √ 3 for r ∈ (3 / 2 , 2], and E [ A (Γ r 1 ( X n ))] → A ( ς r Y ) = √ 3 / 4 (1 − 3 / r 2 ) for r ∈ (2 , ∞ ], as n → ∞ . Theorem 2: The domination num b er γ n ( r ) = γ ( X n ; U ( T ( Y )) , N r Y ) is degener ate in the limit for r ∈ [1 , ∞ ] \ { 3 / 2 } as n → ∞ . Pro of: F or r ∈ [1 , 3 / 2), ς r Y = ∅ and T ( Y ) \ N r Y ( X [ j ] ) has pos itiv e area fo r all j = 1 , 2 , 3. F ur thermore, T ( Y ) \ ( N r Y ( X [ j ] ) ∪ N r Y ( X [ k ] )) ha s p ositive area fo r all pa irs { j, k } ⊂ { 1 , 2 , 3 } . Reca ll that γ n ( r ) ≤ 3 with probability 1 for all n a nd r . Hence γ n ( r ) → 3 in probability a s n → ∞ . F or r ∈ (3 / 2 , ∞ ], ς r Y has p ositiv e area , so γ n ( r ) → 1 in probability as n → ∞ . Theorem 3 : F or r = 3 / 2 , lim n →∞ γ n ( r ) > 1 a.s. In pa r ticular lim n →∞ γ n (3 / 2) = ( 2 wp ≈ . 7 413 , 3 wp ≈ . 2 487 . Thu s E [ γ n (3 / 2)] → µ ≈ 2 . 2587 a s n → ∞ , and V ar [ γ n (3 / 2)] → σ 2 ≈ . 191 8 as n → ∞ . Pro of: See App endix. The finite sa mple distribution of γ n (3 / 2), and hence the finite s ample mean and v aria nce, can b e obtained by num erical metho ds. W e estimate the distr ibution of γ n (3 / 2) fo r v ar ious fixed n empirically . In T able 1, we present empirica l estima tes for n = 10 , 2 0 , . . . , 10 0 , 20 0 , 30 0 with 1000 Monte Carlo r e plicates. See also Figure 3. Theorem 4 Let γ n ( r ) = γ ( X n ; U ( T ( Y )) , N r Y ). Then r 1 < r 2 implies γ n ( r 2 ) < S T γ n ( r 1 ). Pro of: Supp ose r 1 < r 2 . Then P ( γ n ( r 2 ) = 1) > P ( γ n ( r 1 ) = 1) a nd P ( γ n ( r 2 ) = 2) > P ( γ n ( r 1 ) = 2) and P ( γ n ( r 2 ) = 3 ) < P ( γ n ( r 1 ) = 3). Hence the desired res ult follows. 5 0 50 100 150 200 250 300 0.0 0.2 0.4 0.6 0.8 1.0 n empirical value of P( γ n =k) k=1 k=2 k=3 Figure 3: Plotted a re the empirical estimates of P ( γ n (3 / 2) = k ) versus v arious n v alues. 4 The Null Distribution of the Mean Domination Num b er in the Multiple T riangle Case Suppo se Y is a finite co llection of po in ts in R 2 with |Y | ≥ 3 . Consider the Delaunay triangulation (assumed to exist) of Y , where T j denotes the j th Delaunay triangle , J denotes the n umber of tr iangles, a nd C H ( Y ) denotes the co nvex h ull of Y (Ok ab e et al. (2000)). W e wis h to inv estigate H 0 : X i iid ∼ U ( C H ( Y )) against segreg ation and asso ciation alternatives (see Section 5). Figure 4 presents a realizatio n o f 100 0 o bs erv atio ns indep enden t a nd iden tically dis tributed according to U ( C H ( Y )) for |Y | = 10 and J = 13 . 0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 Figure 4: A re a lization of H 0 for |Y | = 10, J = 13 , a nd n = 100 0 . The digra ph D is constructed using N r Y j ( · ) as des c ribed a bov e, where for X i ∈ T j the three p oints in Y defining the Dela una y tria ngle T j are used as Y j . Let γ n j ( r ) b e the domination num b er of the comp onen t of the dig raph in T j , w he r e n j = |X n ∩ T j | . 6 Theorem 5: (Asymptotic Normality) Supp ose n j ≫ 1 and J is sufficien tly lar ge. Then the null distribution of the mean dominatio n num b er G J := 1 J P J j =1 γ n j (3 / 2) is given by G J approx ∼ N ( µ, σ 2 /J ) where µ a nd σ 2 are given in Theo rem 3 a bov e. Pro of: F or fixed J sufficien tly large and each n j sufficiently lar ge, γ n j (3 / 2) are approximately indep en- dent identically distr ibuted as in Theo rem 3. Figure 5 indicates that, for J = 13 with the realization of Y given in Figure 4 and n = 100 the nor mal approximation is not appropria te, even though the distribution lo oks symmetric, since no t a ll n j are suf- ficient ly larg e , but for n = 10 00 the histog ram and the corre s ponding normal curve are similar indicating that this sa mple size is lar ge enoug h to allow the use of the a symptotic no rmal approximation, since all n j are sufficient ly larg e . How ever, larg er J v alues require larg e r s ample sizes in or der to obtain approximate normality . 1.0 1.5 2.0 2.5 3.0 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 P S f r a g r e p la c e m e n t s Density 1.8 2.0 2.2 2.4 2.6 0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 P S f r a g r e p la c e m e n t s Density Figure 5: Depicted ar e G J approx ∼ N ( µ ≈ 2 . 258 7 , σ 2 /J ≈ . 19 17 /J ) for J = 13 and n = 100 (left) n = 10 00 (right). Histograms are based on 1000 Monte Ca rlo replicates and the curves are the a ssociated approximating normal curves. F or finite n , le t G J ( r ) be the mean do mination n umber a ssocia ted with the digr a ph based on N r Y . Then as a cor ollary to Theo rem 4 it follows that for r 1 < r 2 , we hav e G J ( r 2 ) < S T G J ( r 1 ). 5 Alternativ es: S egre gation and Asso ciation In a tw o class setting, the phenomenon known as se gr e gation o ccurs when members of one class ha ve a tendency to r epel members o f the other class. F or ins tance, it may b e the case that one t yp e of plant do es not grow w ell in the vicinity of another type of plant, and vice versa. This implies , in our notation, that X i are unlikely to b e lo cated near an y elemen ts of Y . Alternatively , asso ciation o ccurs when members of one class hav e a tendency to attract members of the other clas s , as in sy m biotic sp ecies, so that the X i will tend to cluster a round the elements of Y , for example. See, fo r instance, [Dixon, 1994], [Co omes et al., 1 999 ]. W e define tw o simple class e s of alternatives, H S ε and H A ε with ε ∈ (0 , √ 3 / 3), for segr egation and asso- ciation, res pectively . Let Y e = { (0 , 0) , (0 , 1) , (1 / 2 , √ 3 / 2) } and T e = T ( Y e ). F or y ∈ Y e , let e ( y ) denote the edge o f T e opp osite vertex y , and for x ∈ T e let ℓ y ( x ) denote the line par allel to e ( y ) through x . Then define T ( y , ε ) = { x ∈ T e : d ( y , ℓ y ( x )) ≤ ε } . Let H S ε be the model under which X i iid ∼ U ( T e \ ∪ y ∈Y T ( y , ε )) and H A ε be the mo del under which X i iid ∼ U ( ∪ y ∈Y T ( y , √ 3 / 3 − ε )). Thu s the segr egation mo del excludes the p ossibility of any X i o ccurring near a y j , a nd the as sociatio n mo del req uires that all X i o ccur near y j ’s. The √ 3 / 3 − ε in the definition of the ass ociation alternative is so that ε = 0 yields H 0 under b oth cla sses o f a lternativ es. 7 Remark: These definitions of the alternatives are g iv en for the standard equila teral triangle. The geometry inv ar iance result of Theorem 1 still holds under the alternatives, in the following sense. If, in a n arbitrar y triangle, a small p ercen tage δ · 100% where δ ∈ (0 , 4 / 9) of the ar ea is carved awa y as forbidden from each v ertex using line seg men ts parallel to the opp osite edg e, then under the transfor mation to the standard equilateral triangle this will result in the alternative H S √ 3 δ/ 4 . This arg ument is for seg regation; a similar constr uction is av a ilable for asso ciation. Theorem 6: (Stochastic Ordering) Let γ n,ε ( r ) b e the domination num b er under the seg regation alter- native with ε > 0 . Then with ε j ∈ (0 , √ 3 / 3), j = 1 , 2, ε 1 > ε 2 implies that γ n,ε 1 (3 / 2) < S T γ n,ε 2 (3 / 2). Pro of: Note that P ( γ n,ε 1 (3 / 2) = 1 ) > P ( γ n,ε 2 (3 / 2) = 1 ) and P ( γ n,ε 1 (3 / 2) = 2 ) > P ( γ n,ε 2 (3 / 2) = 2 ), hence the de s ired res ult follows. Note that for Theore m 6 to hold in the limiting ca se, ε 1 ∈ (0 , √ 3 / 4] and ε 2 ∈ ( √ 3 / 4 , √ 3 / 3) should hold. F or ε ∈ (0 , √ 3 / 4], γ n,ε (3 / 2) → 2 in pr obabilit y a s n → ∞ , and for ε ∈ ( √ 3 / 4 , √ 3 / 3), γ n,ε (3 / 2) → 1 in probability as n → ∞ . Similarly , the sto c hastic order ing result of The o rem 6 holds for asso ciation for all ε and n < ∞ , with the inequalities b eing reversed. Notice that under seg regation with ε ∈ (0 , √ 3 / 4), γ n,ε ( r ) is degenerate in the limit e xcept for r = (3 − √ 3 ε ) / 2. With ε ∈ ( √ 3 / 4 , √ 3 / 3), γ n,ε ( r ) is degenera te in the limit except for r = √ 3 /ε − 2. Under asso ciation with ε ∈ (0 , √ 3 / 4), γ n,ε ( r ) is degener a te in the limit except for r = 3 2 (1 − √ 3 ε ) . The mean domination n umber of the proximit y catch dig raph, G J := 1 J P J j =1 γ n j (3 / 2), is a test statistic for the seg regation/ass o ciation a lternativ e; r ejecting for extreme v alues of G J is a ppropriate, s ince under segrega tion we exp ect G J to b e small, while under as sociatio n we exp ect G J to b e large. Using the equiv alent test statistic S = √ J ( G J − µ ) /σ, (1) the asymptotic cr itical v alue for the o ne-sided level α test ag ainst segreg a tion is given by z 1 − α = Φ − 1 ( α ) (2) where Φ( · ) is the sta ndard normal distribution function. The test r ejects for S < z 1 − α . Aga ins t asso ciation, the test r ejects for S > z α . Depicted in Figur e 6 ar e the segr egation with δ = 1 / 16 a nd ass ociation with δ = 1 / 4 r ealizations for |Y | = 10 and J = 1 3, and n = 10 00. The asso ciated mean domination n umbers ar e 2 . 308 , 1 . 923, and 3 . 000 , for the null realiza tion in Figure 4 a nd the se g regation a nd a ssocia tio n alterna tives in Figure 6, resp ectively , yielding p-v alues . 660 , . 003 a nd 0 . 000 . W e also pre s en t a Monte Car lo p o wer inv estiga tion in Section 6 for these cas e s. Theorem 7 : (Consistency) Let J ∗ ( α, ε ) := σ · z α µ − G J 2 where ⌈ ·⌉ is the ceiling function and ε -dep endence is throug h G J under a g iv en a lternativ e. Then the test aga inst H S ε which rejects for S < z 1 − α is cons is ten t for all ε ∈ (0 , √ 3 / 3) and J ≥ J ∗ (1 − α, ε ), and the test a gainst H A ε which rejects for S > z α is consistent for all ε ∈ (0 , √ 3 / 3) and J ≥ J ∗ ( α, ε ). Pro of: Let ε > 0. Under H S ε , γ n,ε (3 / 2) is degene r ate in the limit as n → ∞ , which implies G J is a constant a.s. In particula r , for ε ∈ (0 , √ 3 / 4], G J = 2 and for ε ∈ ( √ 3 / 4 , √ 3 / 3), G J = 1 a.s. as n → ∞ . Then the test statistic S = √ J ( G J − µ ) / σ is a c onstan t a.s. and J ≥ J ∗ (1 − α, ε ) implies that S < z 1 − α a.s. Hence consis tency follows for segre g ation. Under H A ε , as n → ∞ , G J = 3 for all ε ∈ (0 , √ 3 / 3), a.s. Then J ≥ J ∗ ( α, ε ) implies that S > z α a.s., hence consis tency follows for as sociatio n. 8 0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 0.2 0.4 0.6 0.8 1 0.2 0.4 0.6 0.8 Figure 6: A re a lization of se g regation (left) a nd asso ciation (r igh t) for |Y | = 10, J = 13 , a nd n = 100 0. 6 Mon te Carl o P o w er Analysis In Figure 7, w e observe empirically that even under mild seg regation we obtain co nsiderable sepa ration betw een the kernel density estimates under null and segr e gation ca ses for mo derate J and n v a lues sugges ting high power a t α = . 0 5. A similar r esult is obs erv ed for as s ociation. With J = 1 3 a nd n = 1000 , under H 0 , the estimated significa nce lev el is b α = . 0 9 relative to segr egation, and b α = . 07 rela tiv e to asso ciation. Under H S √ 3 / 8 , the empirical power (using the a symptotic cr itica l v alue) is b β = . 97, and under H A √ 3 / 21 , b β = 1 . 00. With J = 30 and n = 5000, under H 0 , the estimated sig nificance level is b α = . 06 relative to seg regation, and b α = . 04 relative to a ssocia tion. The empirical p o wer is b β = 1 . 00 for b oth alternatives. W e also estimate the empiric a l p o wer b y using the empirica l critical v a lues. With J = 13 and n = 1 000, under H S √ 3 / 8 , the empirical p ow er is b β mc = . 7 2 at empirical level b α mc = . 0 33 and under H A √ 3 / 21 the empirical power is b β mc = 1 . 00 at empirica l level b α mc = . 03 . With J = 30 and n = 5 000, under H S √ 3 / 8 , the empirical power is b β mc = 1 . 0 0 at empirical level b α mc = . 03 4 and under H A √ 3 / 21 the empirical p o wer is b β mc = 1 . 0 0 at empirical level b α mc = . 0 4. 1.4 1.6 1.8 2.0 2.2 2.4 2.6 2.8 0 1 2 3 4 5 P S f r a g r e p la c e m e n t s kernel density es timate relative density 1.8 2.0 2.2 2.4 2.6 0 2 4 6 8 10 P S f r a g r e p la c e m e n t s kernel density es timate relative density Figure 7: Two Mo n te Carlo ex periments agains t the seg regation alternatives H S √ 3 / 8 with δ = 1 / 16. Depicted are kernel density estimates of G J for J = 1 3 and n = 100 0 with 1 0 00 replicates (left) and J = 30 and n = 5000 with 100 0 replicates (rig ht) under the null (solid) and alter nativ e (dashed). 9 7 Extension to Hig her Dimensions The e xtension to R d for d > 2 is straightforw ard. Let Y = { y 1 , y 2 , · · · , y d +1 } b e d + 1 no n-coplanar p oin ts. Denote the simplex for med by these d + 1 p oint s as S ( Y ). (A simplex is the simplest po lytope in R d having d + 1 v ertices, d ( d + 1) / 2 edges , and d + 1 faces of dimension ( d − 1).) F or r ∈ [1 , ∞ ], define the r -factor proximit y map as follows. Given a po in t x in S ( Y ), let y := arg min y ∈Y volume ( Q y ( x )) where Q y ( x ) is the p olytope with vertices b eing the d ( d + 1) / 2 midp oint s of the edg es, the vertex y and x . That is, the vertex r egion for vertex v is the p olytope with vertices g iven by v a nd the midp oin ts of the edges. Let v ( x ) be the vertex in whose r egion x falls . If x falls on the bo undary o f tw o vertex regions, we assign v ( x ) arbitra rily . Let ϕ ( x ) b e the face opp osite to vertex v ( x ), and η ( v ( x ) , x ) b e the hyper pla ne par allel to ϕ ( x ) which contains x . Let d ( v ( x ) , η ( v ( x ) , x )) b e the (p erpendicular ) Euclidea n distance fro m v ( x ) to η ( v ( x ) , x ). F or r ∈ [1 , ∞ ), let η r ( v ( x ) , x ) be the hyperplane para lle l to ϕ ( x ) such that d ( v ( x ) , η r ( v ( x ) , x )) = r d ( v ( x ) , η ( v ( x ) , x )) a nd d ( η ( v ( x ) , x ) , η r ( v ( x ) , x )) < d ( v ( x ) , η r ( v ( x ) , x )). Le t S r ( x ) b e the p olytop e similar to and with the sa me o rien tation a s S ha ving v ( x ) as a vertex and η r ( v ( x ) , x ) as the oppo site face. Then the r - factor proximit y region N r Y ( x ) := S r ( x ) ∩ S ( Y ). Also, let ζ j ( x ) b e the h yp erplane such that ζ j ( x ) ∩ S ( Y ) 6 = ∅ and r d ( y j , ζ j ( x )) = d ( y j , η ( y j , x )) for j = 1 , 2 , . . . , d + 1. Then Γ r 1 ( x ) = ∪ d +1 j =1 (Γ r 1 ( x ) ∩ R ( y j )) where Γ r 1 ( x ) ∩ R ( y j ) = { z ∈ R ( y j ) : d ( y j , η ( y j , z )) ≥ d ( y j , ζ j ( x ) } , for j = 1 , 2 , 3 . Theorem 1 g eneralizes, so that any simplex S in R d can b e tr a nsformed in to a regular poly tope (with egdes b eing equal in length and fac e s b eing equa l in volume) pr eserving uniformity . Delaunay tria ngulation bec omes Delaunay tessella tion in R d , provided that no more tha n d + 1 p oints be ing cospher ical (lying on the boundar y of the same sphere). In particular, with d = 3, the general s implex is a tetrahedron (4 vertices, 4 triangular faces and 6 edges ), which can b e mapped into a regular tetrahedro n (4 faces are equilatera l triangles) with v ertices (0 , 0 , 0) , (1 , 0 , 0 ) (1 / 2 , √ 3 / 2 , 0) , (1 / 2 , √ 3 / 6 , √ 6 / 3). L e t γ n ( r , d ) b e the domination nu mber for the extension to R d . Then it is easy to s ee that γ n ( r , 3) is nondegenerate as n → ∞ for r = 4 / 3, and otherwise degenerate. In R d , it c an b e seen that γ n ( r , d ) is nondegener ate in the limit only for r = ( d + 1) /d . Moreov er, it can b e shown that lim n →∞ P (2 ≤ γ n (( d + 1) /d, d ) ≤ d + 1) = 1, and we conjecture that lim n →∞ P ( d ≤ γ n (( d + 1) /d, d ) ≤ d + 1) = 1 . 7.1 Discussion In this article we inv estigate the mathematical prop erties o f a domination num b er metho d for the a nalysis of spatia l p oint patterns. The firs t proximit y map rela ted to r -factor proximit y ma p, N r Y , in liter ature is the spheric al pr oximity map , N S ( x ) := B ( x, r ( x )), (which is ca lled CCCD in the literature, see [Prieb e et a l., 20 01 ], [DeVinney et al., 2 0 02 ], [Marchette and Pr iebe, 200 3], [P riebe et al., 20 03a ], and [Pr iebe et a l., 2 003b]) . A s ligh t v a riation of N S is the ar c-s li c e pr ox imi ty map N AS ( x ) := B ( x, r ( x )) ∩ T ( x ) where T ( x ) is the Delaunay cell that c o n tains x (see [Ceyhan and P riebe, 20 03a ]). F ur ther more, Ceyha n and Pr iebe int ro duced the cen tral similarity proximit y map, N C S , in [Ceyha n and P riebe, 200 3a ]. The r -fa c to r proximit y map, when compared to the other s , has the a dv antages that the a symptotic distribution of the domination n umber γ n ( r ) is tractable (see Theorem 3). The distribution of the domination num b er of the proximit y catch digra phs based on N S or N AS is not tractable, a nd that o f N C S is an o p en problem. F ur ther more, N C S and N r Y enjoy the g eometry inv aria nce prop ert y over triangles for uniform data. Moreov er , while finding the exa ct minimum do minating sets is a n NP-Hard pro blem for N S , N AS , and N τ C S , the ex a ct minimum dominating sets can b e found in po lynomial time for N r Y . Additionally , N AS ( x ), N r Y ( x ), and N τ C S ( x ) are w ell defined only fo r x ∈ C H ( Y ), the co n vex hu ll o f Y , whereas N S ( x ) is well defined for a ll x ∈ R d . The N S (the proximit y map asso ciated with CCCD) is used in classifica tion in the litera ture, but not for testing s patial patterns b et ween two or more clas s es. W e develop a technique to test the patterns of segreg ation or asso ciation. There ar e many tests av ailable for segreg ation a nd a ssocia tion in ecolog y literature. See [Dixon, 1 994] for a sur vey on these tests and relev ant references . Tw o of the mos t commonly 10 used tests are Pielou’s χ 2 test of indep endence and Ripley’s test bas ed o n K ( t ) and L ( t ) functions. How ever, the test we intro duce here is no t compar able to either of them. Our metho d deals with a s ligh tly different t yp e of data than most metho ds to exa mine spatial patterns. The sample size for one type of p oint (t yp e X po in ts) is mu ch la rger compared to the the other (type Y p o in ts). The null hypo thesis we consider is considerably mo re restr ictiv e than current a pproaches, which can b e used m uch mor e generally . The null h y p othesis for testing seg regation o r asso ciation can b e desc r ibed in two slightly different fo r ms ([Dixon, 1 994]) : (i) co mplete spatial r andomness, that is, each c lass is distributed randomly throughout the ar e a o f interest. It des cribes b oth the arrang emen t of the lo cations a nd the asso ciation b et ween classes . (ii) ra ndom lab eling o f lo cations, which is less restrictive than s patial ra ndomness, in the sense that ar- rangement of the lo cations can either be random o r non-rando m. Our test is closer to the former in this r egard. References [Ceyhan and P riebe, 20 03a] Ceyhan, E . and P riebe, C. (2003a). Ce n tra l similarity proximit y ma ps in Delau- nay tessellations. In Pr o c e e dings of the Joint St atistic al Me eting, Statistic al Computing S e ction, Americ an Statistic al Asso ciation . [Ceyhan and P riebe, 20 03b] Ceyhan, E . and Prieb e, C. (20 03b). The us e of domination num b er of a ran- dom proximit y ca tc h digra ph for testing segreg ation/asso ciation. T echnical Rep ort 64 2, Depar tmen t o f Applied Ma thematics and Sta tis tics , J ohns Hopkins Universit y , Baltimore, MD 212 18-2682. s ubmitted for publication. [Co omes et al., 1999 ] Co omes, D. A., Rees, M., and L., T. (19 99). Identif ying a ggregation and a ssocia tion in fully mapp ed spatial data . Ec olo gy , 8 0:554–56 5 . [DeVinney et a l., 2002 ] DeVinney , J., Priebe, C. E ., Marchette, D. J., and So- colinsky , D. (2 002). Random walks and catc h digraphs in classification. http:/ /www.galaxy . gmu.edu/interface/I02/I2002Proceedings/DeVinneyJason/DeVinneyJason.paper.pdf . Computing Science a nd Statistics, V o l. 34 . [Dixon, 19 94] Dixon, P . M. (1994 ). T esting spa tial s e gregation using a neares t-neigh bo r contingency table. Ec olo gy , 75(7):194 0 –1948. [Gotelli and Graves, 1996 ] Gotelli, N. J. and Graves, G. R. (19 96). Nu l l Mo dels in Ec olo gy . Smithsonian Institution Pre s s. [Marchette and Pr iebe, 200 3 ] Marchette, D. J. and P riebe, C. E . (2003 ). Character izing the scale dimens io n of a high dimensio nal class ification problem. Pattern R e c o gnition , 36(1):45– 60. [Prieb e et al., 2001 ] Prieb e, C. E., DeVinney , J. G., a nd Ma rc hette, D. J. (200 1). On the distr ibution of the domination num b er of ra ndom class catch cover digraphs. Statistics and Pr ob ability L etters , 55 :239–246. [Prieb e et al., 2003 a] Prieb e, C. E., Marchette, D. J ., DeVinney , J., a nd So colinsky , D. (2003a ). Cla ssification using class cover catch digraphs. Journal of Classific ation , 20(1 ):3–23. [Prieb e et al., 2003 b] Prieb e, C. E., So lk a, J . L., Marchette, D. J., a nd Clark, B. T. (2003b). Class cov er catch digraphs for latent class discov ery in gene expr ession monitoring by DNA microar ra ys. Computational Statistics and Data Analysi s on Visualization , 43-4:6 21–632. [W est, 20 0 1] W est, D. B. (20 01). In tr o duction to Gr aph The ory, 2nd e d . Prentice Hall, NJ. 11 8 App endix Pro of of P roposition 1 T o prov e Pro position 1, w e show that the exp ected lo cus of the boundar y of the Γ 1 -region, ∂ (Γ r 1 ( X n )), go es to ∂ ( ς r Y ) as n → ∞ by showing that the exp ected loc i of X e j are e j for j = 1 , 2 , 3. See [Ceyhan and P riebe, 2003b] for the details . F or sufficiently lar ge n and g iv en X e j = ( x j , y j ) for j = 1 , 2 , 3, A (Γ 3 / 2 1 ( X n )) = √ 3 / 9(3 x 2 2 − 6 x 2 + 2 √ 3 y 2 x 2 − 2 √ 3 y 2 + y 2 2 + 3 + y 3 2 − 2 √ 3 y 3 x 3 + 3 x 3 2 + 4 y 1 2 ) . The asy mptotica lly accurate joint p df of X e j ’s is f 3 ( ζ ) = n ( n − 1)( n − 2) √ 3 / 36( − 2 √ 3 y 1 + √ 3 y 3 − 3 x 3 + √ 3 y 2 + 3 x 2 ) 2 n − 3 / ( √ 3 / 4) n with the supp ort D S = { ζ = ( x 1 , y 1 , x 2 , y 2 , x 3 , y 3 ) ∈ R 6 : ( x j , y j )’s are distinct } . T he n for sufficiently large n , E [ A (Γ 3 / 2 1 ( X n ))] ≈ R D S A (Γ 3 / 2 1 ( X n )) f 3 ( ζ ) dζ , w hich g o es to 0 as n → ∞ at the rate O ( n − 2 ). See [Ceyhan and P riebe, 20 03b ] for the details. Pro of of Theorem 3 W e know that γ n ( r ) ≤ 3 a.s. for all r ∈ [1 , ∞ ] and all n . First we show that lim n →∞ P ( γ n (3 / 2) > 1) = 1. Note that P ( γ n (3 / 2) > 1) = P ( X n ∩ Γ 3 / 2 1 ( X n ) = ∅ ). Then w e find P ( X n ∩ Γ 3 / 2 1 ( X n ) = ∅ , E 2 ( n, ε )) where E 2 ( n, ε ) is the event such that 2 ε √ 3 ≤ X 1 ≤ 1 − 2 ε √ 3 and 0 ≤ Z 1 ≤ ε , and 1 / 2 ≤ X 2 ≤ 1 − 2 ε √ 3 , √ 3(1 − X 2 ) − ε ≤ Z 2 ≤ √ 3(1 − X 2 ), and 2 ε √ 3 ≤ X 3 ≤ 1 / 2 , and √ 3 X 3 − ε ≤ Z 3 ≤ √ 3 X 3 . First letting n → ∞ , then ε → 0, yields the desired res ult. See [Cey han and Pr iebe, 2003 b ] for the details . Next, lim n →∞ P ( γ n (3 / 2) ≤ 2) = lim n →∞ P ( γ n (3 / 2) = 2), since lim n →∞ P ( γ n (3 / 2) = 1) = 0. Let Q j := arg min x ∈X n ∩ R ( y j ) d ( x, e j ) = argmax x ∈X n ∩ R ( y j ) d ( ℓ ( y j , x ) , e j ) where e j is the edge opp osite vertex y j for j = 1 , 2 , 3 and let q j = ( x j , y j ) be the r ealization of Q j for j = 1 , 2 , 3 . Then γ n (3 / 2) ≤ 2 iff X n ⊂ N 3 / 2 Y ( Q 1 ) ∪ N 3 / 2 Y ( Q 2 ) or X n ⊂ N 3 / 2 Y ( Q 1 ) ∪ N 3 / 2 Y ( Q 3 ) or X n ⊂ N 3 / 2 Y ( Q 2 ) ∪ N 3 / 2 Y ( Q 3 ). Let the even ts E i,j := X n ⊂ N 3 / 2 Y ( Q i ) ∪ N 3 / 2 Y ( Q j ) for ( i, j ) = { (1 , 2) , (1 , 3) , (2 , 3 ) } . Then P ( γ n (3 / 2) ≤ 2) = P ( E 1 , 2 )+ P ( E 1 , 3 )+ P ( E 2 , 3 ) − P ( E 1 , 2 ∩ E 1 , 3 ) − P ( E 1 , 2 ∩ E 2 , 3 ) − P ( E 1 , 3 ∩ E 2 , 3 )+ P ( E 1 , 2 ∩ E 1 , 3 ∩ E 2 , 3 ) . By symmetry , P ( E 1 , 2 ) = P ( E 1 , 3 ) = P ( E 2 , 3 ) and P ( E 1 , 2 ∩ E 1 , 3 ) = P ( E 1 , 2 ∩ E 2 , 3 ) = P ( E 1 , 3 ∩ E 2 , 3 ). Hence P ( γ n (3 / 2) ≤ 2) = 3 h P ( E 1 , 2 ) − P ( E 1 , 2 ∩ E 1 , 3 ) i + P ( E 1 , 2 ∩ E 1 , 3 ∩ E 2 , 3 ) . W e find P ( E 1 , 2 ), by finding the a symptotically a ccurate joint p df of Q 1 , Q 2 . Let T ( Q j ) b e the triang le formed by the median lines a t y k and y l for k , l 6 = j and ℓ ( y j , Q j ), and let ε > 0 b e small enough s uc h that T ( Q j ) ⊂ R ( y j ), for j = 1 , 2 , 3. Then the asymptotically accura te joint p df of Q 1 , Q 2 is f 1 , 2 ( x 1 , y 1 , x 2 , y 2 ) = n ( n − 1) 1 A ( T ( Y )) 2 A ( T ( Y )) − A ( T ( q 1 )) − A ( T ( q 2 )) A ( T ( Y )) n − 2 where A ( T ( q 1 )) = √ 3 / 36 − 2 √ 3 + 3 y 1 + 3 √ 3 x 1 2 and A ( T ( q 2 )) = √ 3 / 36 − 3 y 2 − √ 3 + 3 √ 3 x 2 2 with domain D I = { ( x 1 , y 1 ) ∈ R ( y 1 ) : y 1 ≥ − √ 3 3 + √ 3 x 1 + √ 3 ε, ( x 2 , y 2 ) ∈ R ( y 2 ) : y 2 ≤ − √ 3 3 + √ 3 x 2 − √ 3 ε } with ε > 0 b e small enoug h s uc h that T ( Q j ) ⊂ R ( y j ), for j = 1 , 2 , 3. 12 Then P ( E 1 , 2 ) ≈ . 4126 (which is found num erically ). See [Ceyhan and Pr iebe, 200 3b ] for the deta ils. Similarly w e find P ( E 1 , 2 ∩ E 1 , 3 ), by finding the joint p df of Q 1 , Q 2 , Q 3 , wher e T ( q 3 ) is the triangle with vertices 1 3 ( √ 3 − 3 y 3 ) √ 3 , y 3 ) , (1 / 2 , √ 3 / 6) , ( √ 3 y 3 , y 3 ). Then the asymptotically accura te joint p df o f Q 1 , Q 2 , Q 3 is f 123 ( x 1 , y 1 , x 2 , y 2 , x 3 , y 3 ) = n ( n − 1) ( n − 2) 1 A ( T ( Y )) 3 A ( T ( Y )) − A ( T ( q 1 )) − A ( T ( q 2 )) − A ( T ( q 3 )) A ( T ( Y )) n − 3 where A ( T ( q 3 )) = √ 3 36 ( − √ 3 + 6 y 3 ) 2 with domain D I = { ( x 1 , y 1 ) ∈ R ( y 1 ) : y 1 ≥ − √ 3 3 + √ 3 x 1 + √ 3 ε, ( x 2 , y 2 ) ∈ R ( y 2 ) : y 2 ≥ − √ 3 3 + √ 3 x 2 − √ 3 ε , ( x 3 , y 3 ) ∈ R ( y 3 ) : y 3 ≤ √ 3 6 + ε } . Then P ( E 1 , 2 ∩ E 1 , 3 ) ≈ . 2 009 (see [Ceyhan and Prie b e, 2003 b ] for the details.) Likewise, we find P ( E 1 , 2 ∩ E 1 , 3 ∩ E 2 , 3 ) ≈ . 1 062 (see [Ceyha n and P riebe, 20 0 3b ] for the details.) Hence we get lim n →∞ P ( γ ( X n , N 3 / 2 Y ) = 2) ≈ . 7413, a nd lim n →∞ P ( γ ( X n , N 3 / 2 Y ) = 3) ≈ . 2587. 13
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment