Subgoaling Relaxation-based Heuristics for Numeric Planning with Infinite Actions
Reading time: 5 minute
...
📝 Original Info
Title: Subgoaling Relaxation-based Heuristics for Numeric Planning with Infinite Actions
ArXiv ID: 2512.22367
Date: 2025-12-26
Authors: Ángel Aso-Mollar, Diego Aineto, Enrico Scala, Eva Onaindia
📝 Abstract
Numeric planning with control parameters extends the standard numeric planning model by introducing action parameters as free numeric variables that must be instantiated during planning. This results in a potentially infinite number of applicable actions in a state. In this setting, off-the-shelf numeric heuristics that leverage the action structure are not feasible. In this paper, we identify a tractable subset of these problems--namely, controllable, simple numeric problems--and propose an optimistic compilation approach that transforms them into simple numeric tasks. To do so, we abstract control-dependent expressions into bounded constant effects and relaxed preconditions. The proposed compilation makes it possible to effectively use subgoaling heuristics to estimate goal distance in numeric planning problems involving control parameters. Our results demonstrate that this approach is an effective and computationally feasible way of applying traditional numeric heuristics to settings with an infinite number of possible actions, pushing the boundaries of the current state of the art.
💡 Deep Analysis
📄 Full Content
Subgoaling Relaxation-based Heuristics for Numeric Planning with Infinite
Actions
´Angel Aso-Mollar1, Diego Aineto1, Enrico Scala2, Eva Onaindia1
1Universitat Polit`ecnica de Val`encia
2Universit`a degli Studi di Brescia
{aaso,dieaigar,onaindia}@vrain.upv.es, {enrico.scala}@unibs.it
Abstract
Numeric planning with control parameters extends the stan-
dard numeric planning model by introducing action param-
eters as free numeric variables that must be instantiated
during planning. This results in a potentially infinite num-
ber of applicable actions in a state. In this setting, off-the-
shelf numeric heuristics that leverage the action structure are
not feasible. In this paper, we identify a tractable subset of
these problems—namely, controllable, simple numeric prob-
lems—and propose an optimistic compilation approach that
transforms them into simple numeric tasks. To do so, we ab-
stract control-dependent expressions into bounded constant
effects and relaxed preconditions. The proposed compilation
makes it possible to effectively use subgoaling heuristics to
estimate goal distance in numeric planning problems involv-
ing control parameters. Our results demonstrate that this ap-
proach is an effective and computationally feasible way of
applying traditional numeric heuristics to settings with an in-
finite number of possible actions, pushing the boundaries of
the current state of the art.
Introduction
In numeric planning, states include numeric variables, which
are updated by actions through arithmetic effects (Fox and
Long 2003). This extension of classical planning enables
quantitative information to directly influence the evolution
of the system, representing phenomena such as resource
consumption, cumulative change, or behavior governed by
numeric computations.
Support for numeric state variables is insufficient for
many problems in which the control is subject to nu-
merically parameterized actions. Consider, for example, a
turn-right action with a certain degree of rotation or
a pour-water action involving an arbitrary number of
liters. Research conducted in this line focuses on extend-
ing numeric planning to include control parameters; i.e., ac-
tion parameters that extend over infinite numeric domains.
Different approaches have explored this idea from comple-
mentary perspectives. The TM-LPSAT planner (Shin and
Davis 2005) integrates the control parameters into a hybrid
SAT and linear programming framework. POPCORN (Savas¸
et al. 2016) and NextFLAP (Sapena, Onaindia, and Marzal
2024), in contrast, embed control parameters within a for-
ward partial-order planning search. More recently, the ap-
proach of (Heesch et al. 2024) delegates the selection of con-
trol parameter values to a neural model.
The aforementioned works treat control parameters as
constraints that narrow the search space, ruling out the mod-
eling of these parameters as decision variables, as this would
lead to an infinite action space. For example, a robot may
be allowed to turn right through an angle between 20° and
45°, yet the consequences of each specific value can dif-
fer significantly. The S-BFS approach (Aso-Mollar et al.
2025b), however, introduces sampling into a forward state-
space search algorithm to explicitly handle control parame-
ters during planning.
S-BFS studies the problem of numeric planning with
control variables, a reformulation of actions with infinite
domain numeric parameters. It is a principled framework
for reasoning in such settings under full state information,
which allows for the use of heuristic functions as estima-
tors. S-BFS provides a systematic way of searching when
there are infinitely many action instantiations, using a sam-
pling function to iteratively generate subsets of successors.
Although it shows to be competitive with respect to SOTA
methods, even when simple heuristics are used (Aso-Mollar
et al. 2025a), the core difficulty with this approach lies in
that standard, informative numeric heuristics (Scala et al.
2016, 2020a) cannot be used in infinite action spaces.
In this paper, we identify a tractable fragment of numeric
planning with control variables and introduce an optimistic
compilation that transforms such problems into simple nu-
meric tasks, a common approach in the literature of nu-
meric planning (Li et al. 2018) or HTN planning (H¨oller
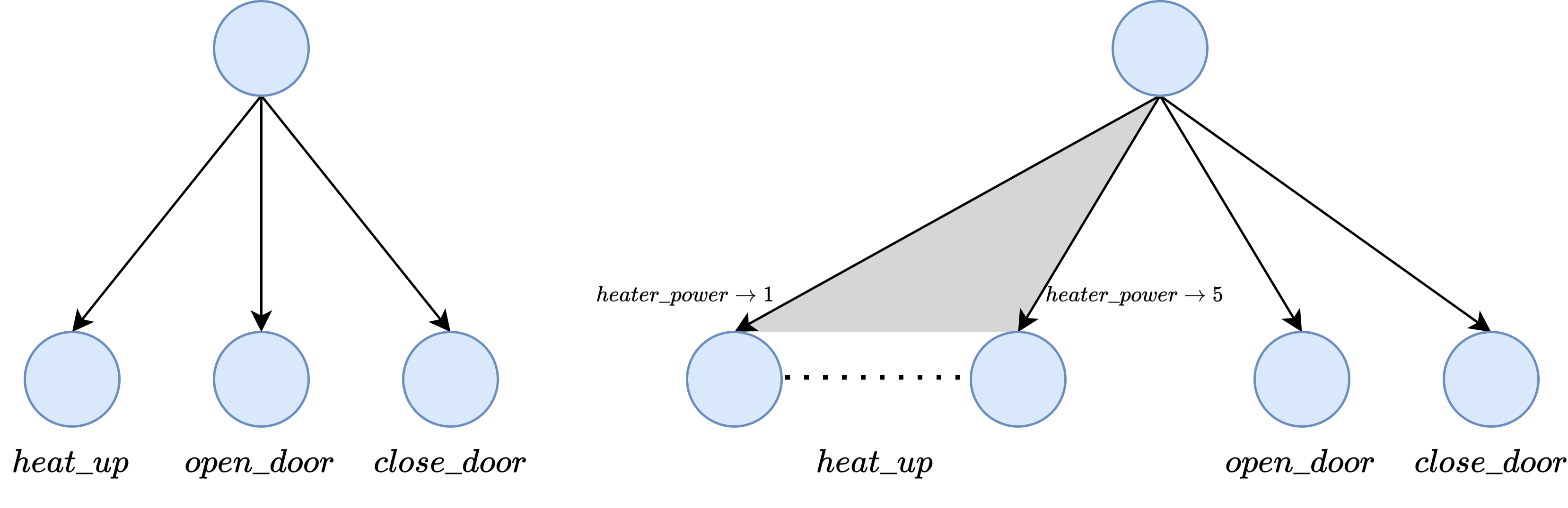
et al. 2019) for defining novel estimators. To do so, we
abstract control-dependent expressions and convert them
into bounded constant effects and relaxed preconditions. We
prove that the resulting compiled problems are safe pruning
under the subgoaling relaxation. This enables existing nu-
meric subgoaling heuristics to be used directly to estimate
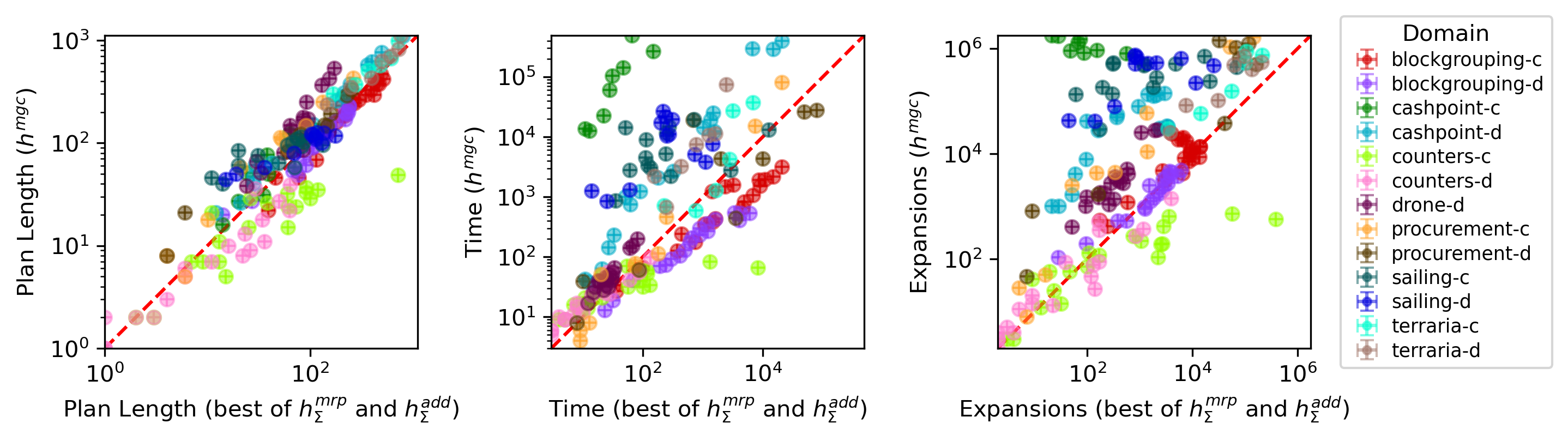
the distance to the goal in the original infinite tasks. Our re-
sults show that this compilation yields an effective and com-
putationally feasible mechanism for applying traditional nu-
meric heuristics in problems with infinite actions.
Background
In this section, we summarize the control va