Autonomous Aerial Vehicle (AAV)-assisted Internet of Things (IoT) represents a collaborative architecture in which AAV allocate resources over 6G links to jointly enhance user-intent interpretation and overall network performance. Owing to this mutual dependence, improvements in intent inference and policy decisions on one component reinforce the efficiency of others, making highly reliable intent prediction and low-latency action execution essential. Although numerous approaches can model intent relationships, they encounter severe obstacles when scaling to high-dimensional action sequences and managing intensive on-board computation.
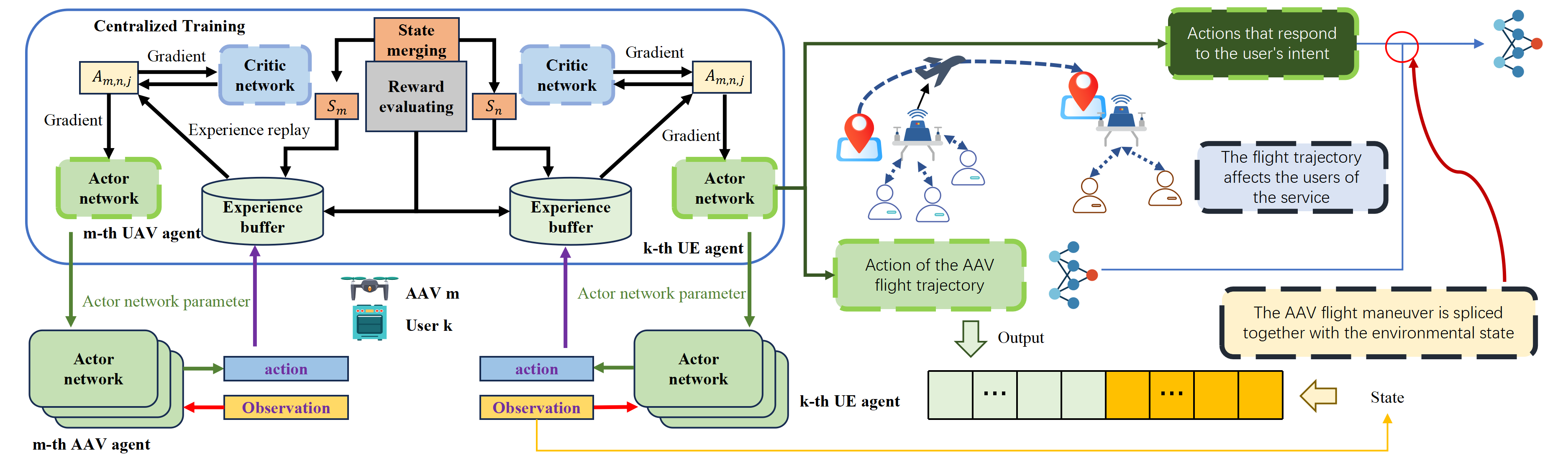
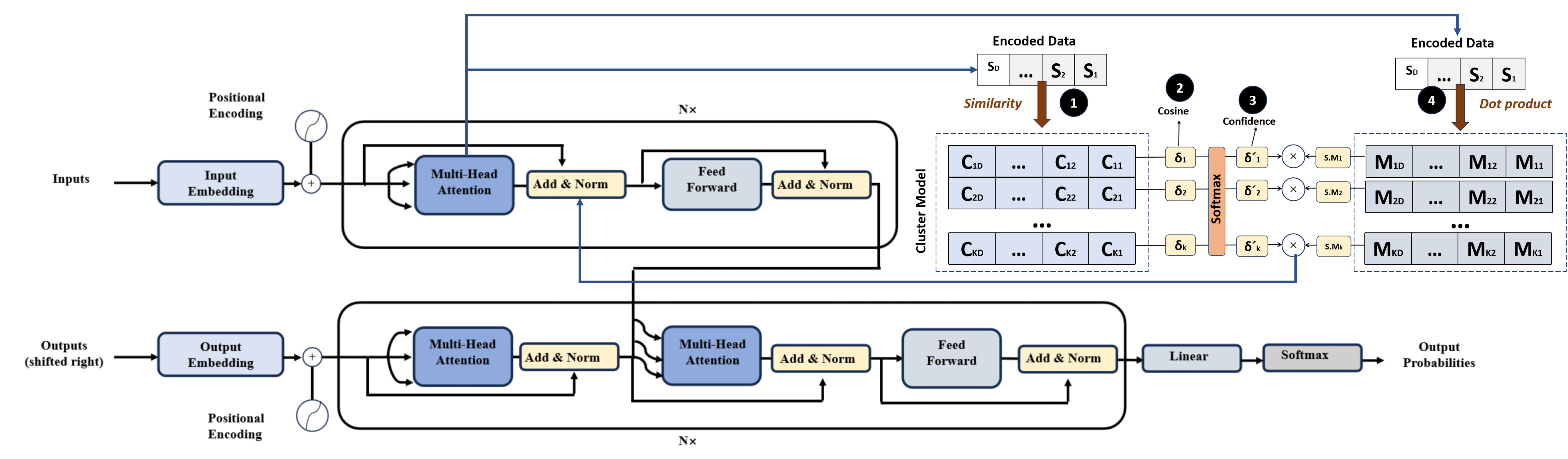
We propose an Intent-Driven Framework for Autonomous Network Optimization comprising prediction and decision modules. First, implicit intent modeling is adopted to mitigate inaccuracies arising from ambiguous user expressions. For prediction, we introduce Hyperdimensional Transformer (HDT), which embeds data into a Hyperdimensional space via Hyperdimensional vector encoding and replaces standard matrix and attention operations with symbolic Hyperdimensional computations. For decision-making, where AAV must respond to user intent while planning trajectories, we design Double Actions based Multi-Agent Proximal Policy Optimization (DA-MAPPO). Building upon MAPPO, it samples actions through two independently parameterized networks and cascades the user-intent network into the trajectory network to maintain action dependencies.
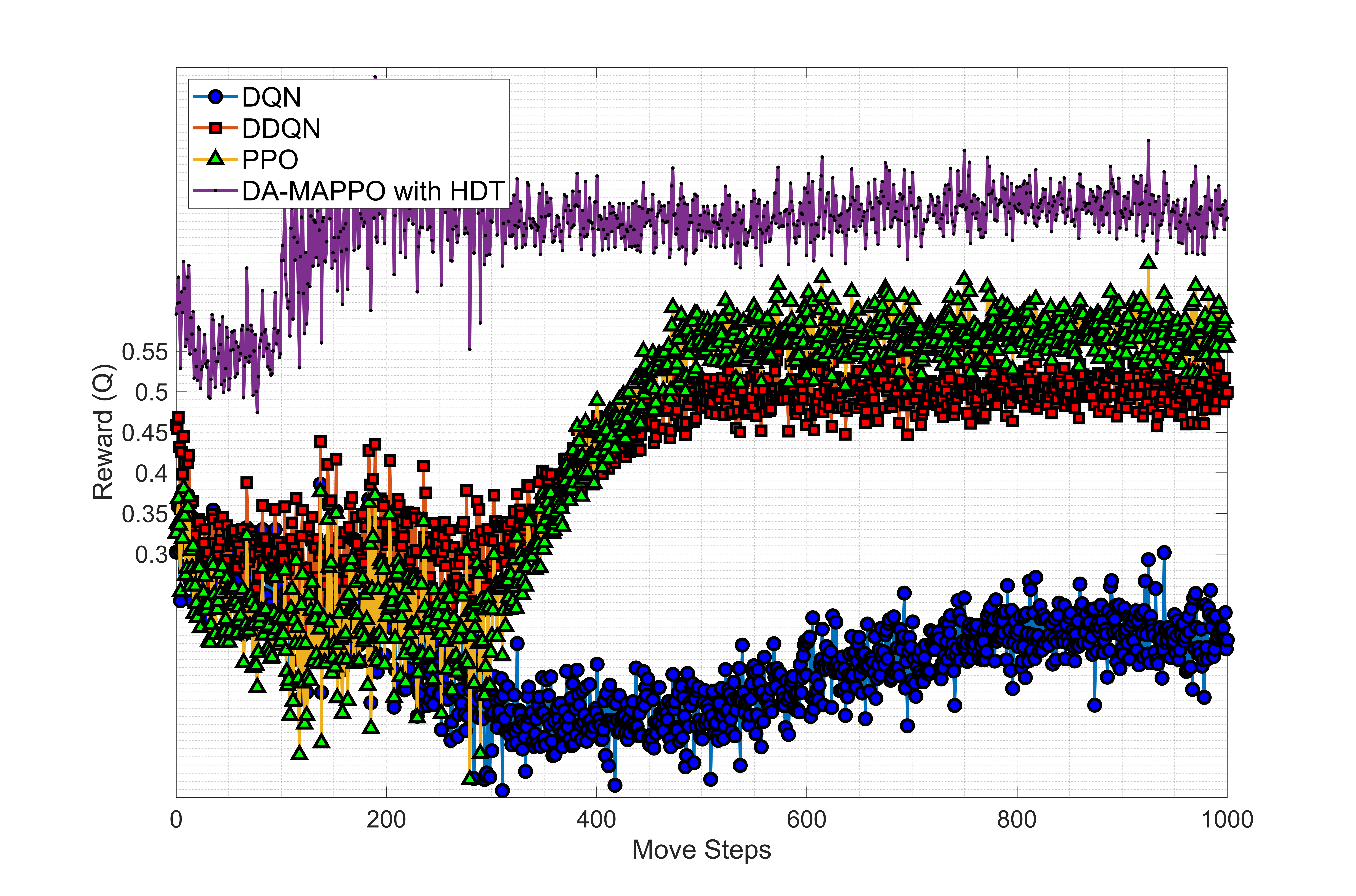
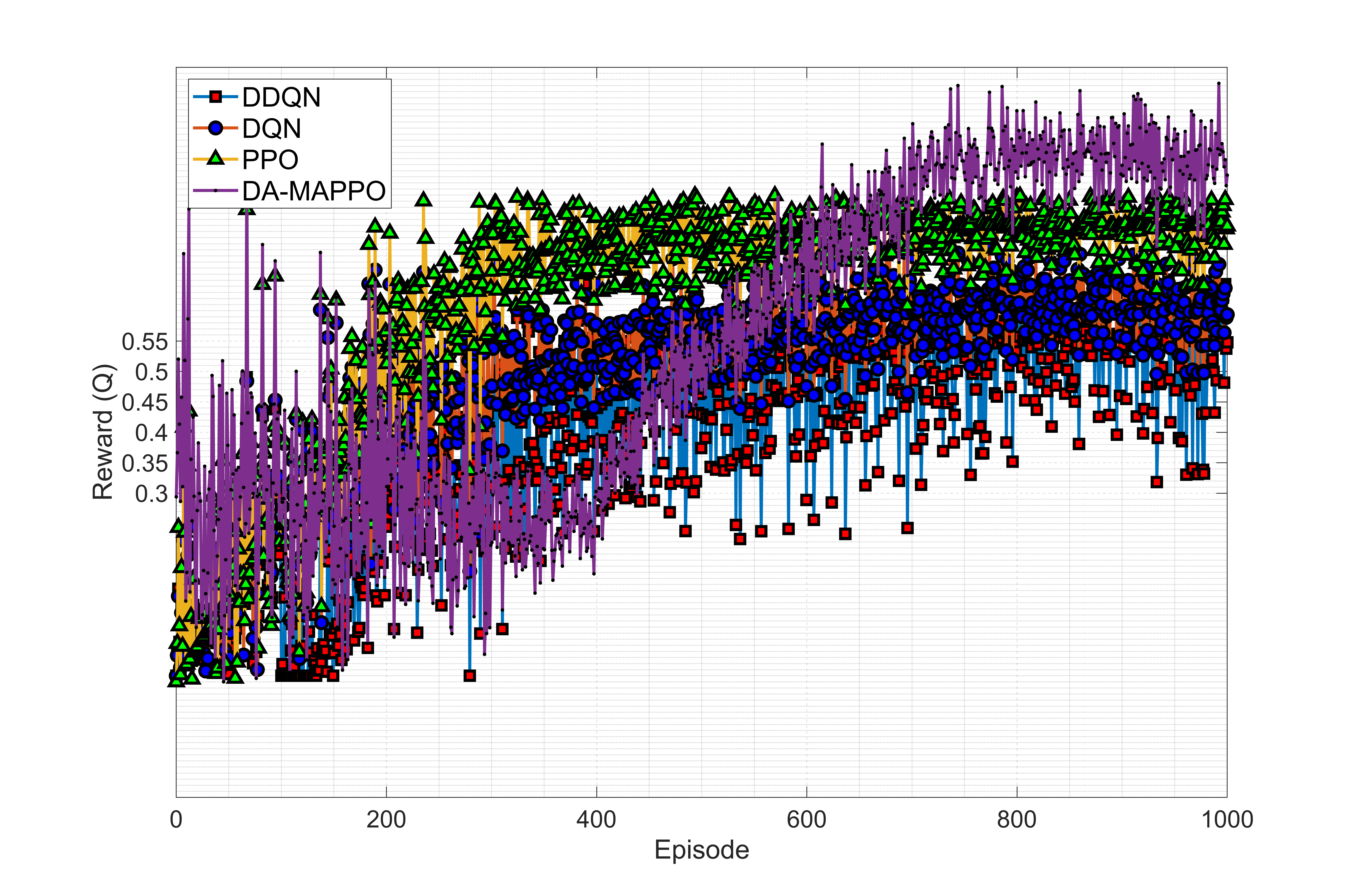
We evaluate our framework on a real IoT action dataset with authentic wireless data. Experimental results demonstrate that HDT and DA-MAPPO achieve superior performance across diverse scenarios.
As Autonomous Aerial Vehicle (AAV)-assisted Internet of Things (IoT) systems continue to expand [1] and traffic behaviors grow increasingly heterogeneous [2], conventional architectures based on static manually configured forwarding rules reveal fundamental scalability limitations. To overcome these inefficiencies, Intent-Based Networking (IBN) [3] has emerged as a paradigm capable of transforming abstract operational objectives into self-validating configurations, enabling X. He, and G. Wang are with the College of Internet of Things, Nanjing University of Posts and Telecommunications, Nanjing, China (E-mail: hexiaoming@njupt.edu.cn, wang123456az@gmail.com).
H. Cui and R. Yuan are with the Digital Intelligence Research Institute, PowerChina, Beijing Engineering Corporation Limited, Beijing, China (Email: yuanr@bjy.powerchina.cn, cuihuajun@bjy.powerchina.cn).
H. Zhao is with the College of Telecommunications and Information Engineering, Nanjing University of Posts and Telecommunications, Nanjing, China (E-mail: zhaoht@njupt.edu.cn).
Corresponding Author: Haitao Zhao continuous autonomous adaptation to evolving large-scale IoT environments. By abstracting policies and coordinating intentdriven control over 6G infrastructures, Intent-Based IoT (IB-IoT) [4] fosters tightly coupled interactions between network operations and user demand; under AAV-enhanced optimization, both user experience and infrastructure responsiveness can be further strengthened. Within IB-IoT, user intent prediction and IBN optimization are central tasks that link intent semantics to executable policies. Leveraging intent-oriented coordination, these components translate high-level user goals into real-time control actions, refine intent policies at the edge with minimal latency, and dynamically optimize the network through AAV assistance.
Existing IB-IoT studies [5]- [7] primarily depend on deterministic policy engines or heuristic optimization, which typically model intent-to-configuration mappings through linear or predefined transformations. Recent advances introduce deep learning intent predictors and Deep Reinforcement Learning (DRL)-based optimizers to capture temporal intent evolution and non-linear performance dependencies. Despite these improvements, intent-driven control still encounters several unresolved challenges:
• Long-Context Intent Parsing with Edge Constraints:
Ultra-long interaction histories require accurate semantic retention under strict computation and energy limits, yet vanishing gradients and memory bottlenecks degrade temporal consistency and increase inference delay [8]. • Expansive Action-Space Optimization Traps: Highdimensional double action spaces trigger combinatorial explosion, causing DRL agents to converge to inferior local solutions [9], [10]. • Intent-Expression Noise and Domain Shift: Nonrigorous or ambiguous user expressions introduce uncertain labels, misalign intent-policy mappings, and lead to severe performance drops when deployed beyond seen domains [11].
To address these issues, our work constrains intent modeling to the implicit regime by mining historical behavior patterns, thereby avoiding ambiguity and noise from explicit inputs. We then introduce the Hyperdimensional Transformer (HDT) for traffic prediction, which embeds raw data into a hyperdimensional vector space, replacing conventional floating-point matrix operations with symbolic vector computation-maintaining prediction fidelity while reducing com-putational and energy overhead. For large-scale continuous control in AAV-assisted IoT, we further propose Double Actions based Multi-Agent Proximal Policy Optimization (DA-MAPPO), which samples actions via decoupled networks and constructs the final sequence through composition, mitigating exponential joint-action sampling complexity.
The main contributions of this paper are summarized as follows.
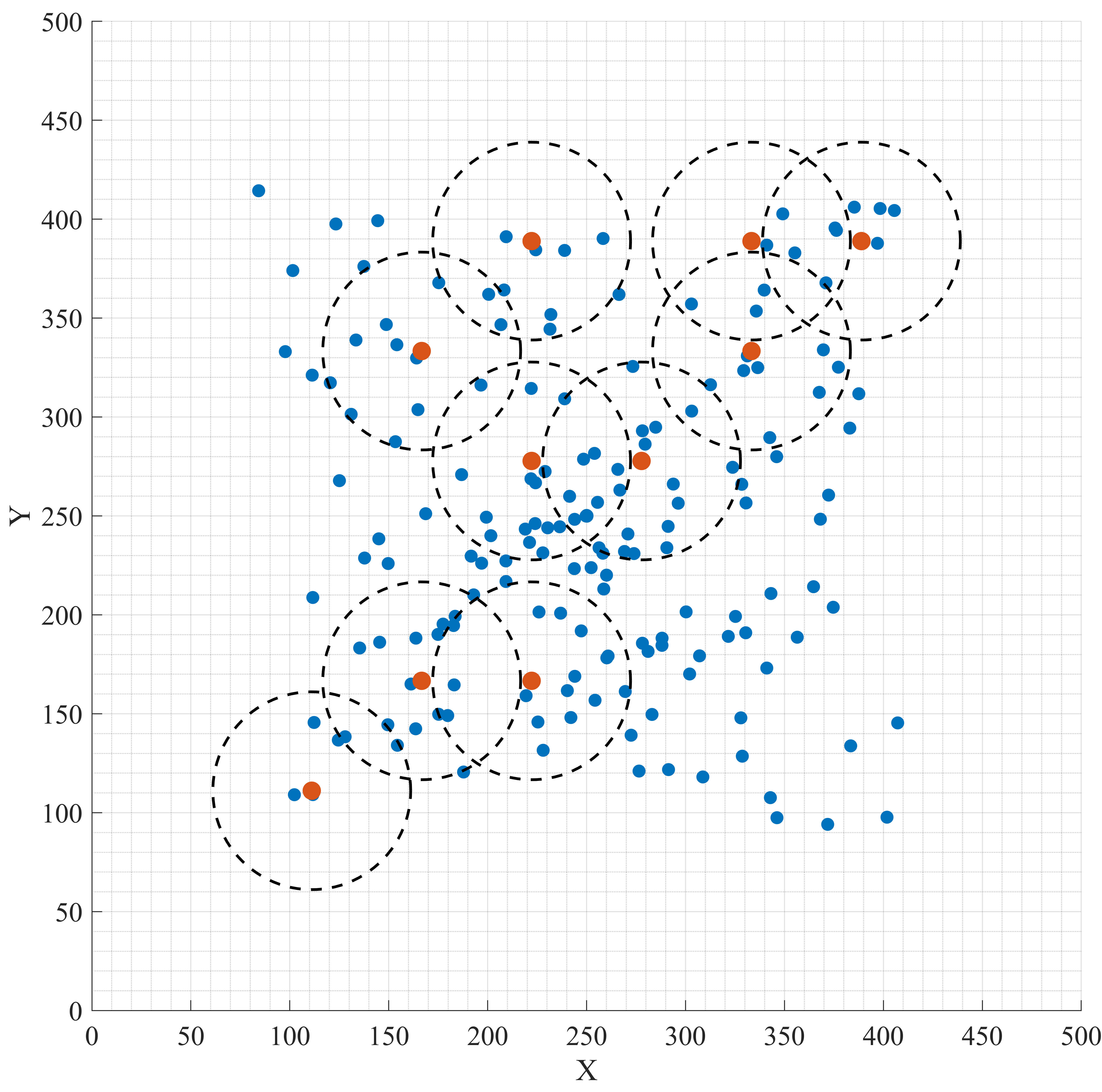
• We establish an end-to-end IBN architecture centered on implicit intent modeling. To characterize user mobility and complex wireless conditions, we incorporate the Continuum Crowds model for trajectory representation and integrate large-and small-scale fading models to evaluate time-varying delay across each 2.4 GHz link. • HDT introduces hyperdimensional vector encoding as a substitute for conventional embedding and transforms attention similarity operations into symbolic computations, significantly reducing floating-point operations and energy cost. DA-MAPPO employs a hybrid strategy combining independent parameterized sampling with cascaded coupling, supporting parallel exploration while preserving high-order dependencies and avoiding local minima in high-dimensional action spaces.
• We conduct performance evaluation on a real IoT behavioral dataset and implement a simulation environment utilizing measured 2.4 GHz channel parameters. Experimental results show that, under diverse channel and resource constraints, HDT and DA-MAPPO consistently surpass existing baselines in predic
This content is AI-processed based on open access ArXiv data.