Title: Online Estimation and Manipulation of Articulated Objects
ArXiv ID: 2601.01438
발행일: 2026-01-04
저자: Russell Buchanan, Adrian Röfer, João Moura, Abhinav Valada, Sethu Vijayakumar
📝 초록 (Abstract)
냉장고에서 주방 서랍에 이르기까지 인간은 일상 생활 속에서 관절형 객체를 손쉽게 다룬다. 이러한 작업을 로봇에게 자동화하려면 서비스 로봇이 임의의 관절형 객체를 조작할 수 있어야 한다. 최근 딥러닝 기반 방법들은 시각 정보를 통해 관절형 객체의 어포던스에 대한 유용한 사전 지식을 예측할 수 있음을 보여주었다. 반면, 많은 기존 연구들은 관절 운동을 관찰함으로써 객체의 관절 구조를 추정하지만, 이는 로봇이 이미 해당 객체를 조작할 수 있는 능력을 갖추고 있어야 한다는 전제가 있다. 본 논문에서는 시각적 사전 지식과 조작 중 얻어지는 프로프리오셉티브 센싱을 결합한 팩터 그래프 기반 온라인 추정 방식을 제안한다. 이 방식은 스크류 이론에 기반한 분석적 관절 모델에 두 정보를 융합한다. 제안 방법을 통해 로봇은 객체에 접촉하기 전 시각으로 초기 관절 예측을 수행하고, 조작 과정에서 운동 및 힘 센싱을 이용해 추정을 빠르게 업데이트한다. 시뮬레이션 및 실제 로봇 실험을 통해 광범위하게 평가했으며, 이전에 보지 못한 서랍을 열 수 있는 폐쇄‑루프 추정·조작 실험을 여러 차례 수행하였다. 실제 하드웨어 실험에서 로봇은 미지의 관절형 객체를 자율적으로 여는 데 75 %의 성공률을 달성하였다.
💡 논문 핵심 해설 (Deep Analysis)
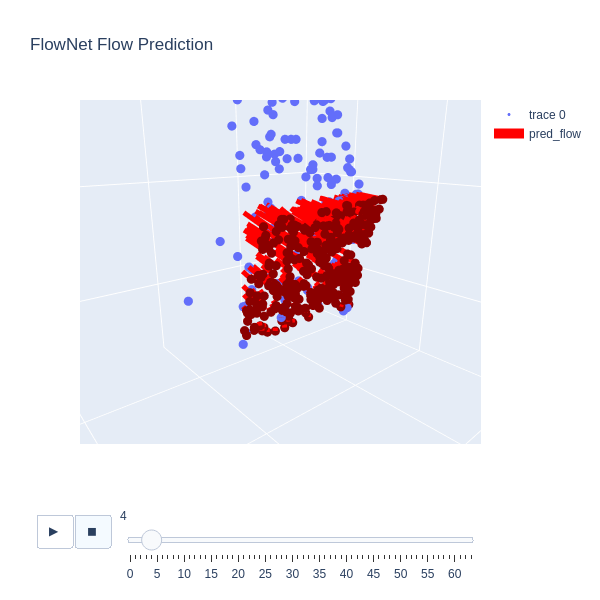
이 논문은 서비스 로봇이 일상 가정 환경에서 마주치는 다양한 관절형 객체(예: 서랍, 문, 회전식 손잡이 등)를 사전 지식 없이도 신속히 파악하고 조작할 수 있도록 하는 통합 프레임워크를 제시한다. 핵심 아이디어는 ‘시각‑촉각 융합’이다. 기존 딥러닝 기반 어포던스 예측은 풍부한 이미지 데이터로부터 객체의 잠재적 움직임 축이나 제한을 추정하지만, 실제 물리적 제약(마찰, 스프링 저항 등)을 반영하지 못한다. 반면, 관절 운동을 직접 관찰해 추정하는 전통적 방법은 실제 접촉이 선행돼야 하므로 초기 탐색 비용이 크다. 저자들은 이 두 접근법의 장점을 팩터 그래프(Factor Graph)라는 베이지안 추정 구조에 결합한다. 팩터 그래프는 각 센서(비전, 관절 각도, 힘/토크)로부터 얻은 측정을 노드에 연결하고, 스크류 이론을 기반으로 한 기하학적 제약을 팩터로 삽입한다. 이렇게 하면 비선형 관절 파라미터(축 방향, 회전/이동량, 스크류 피치 등)를 실시간으로 업데이트할 수 있다.
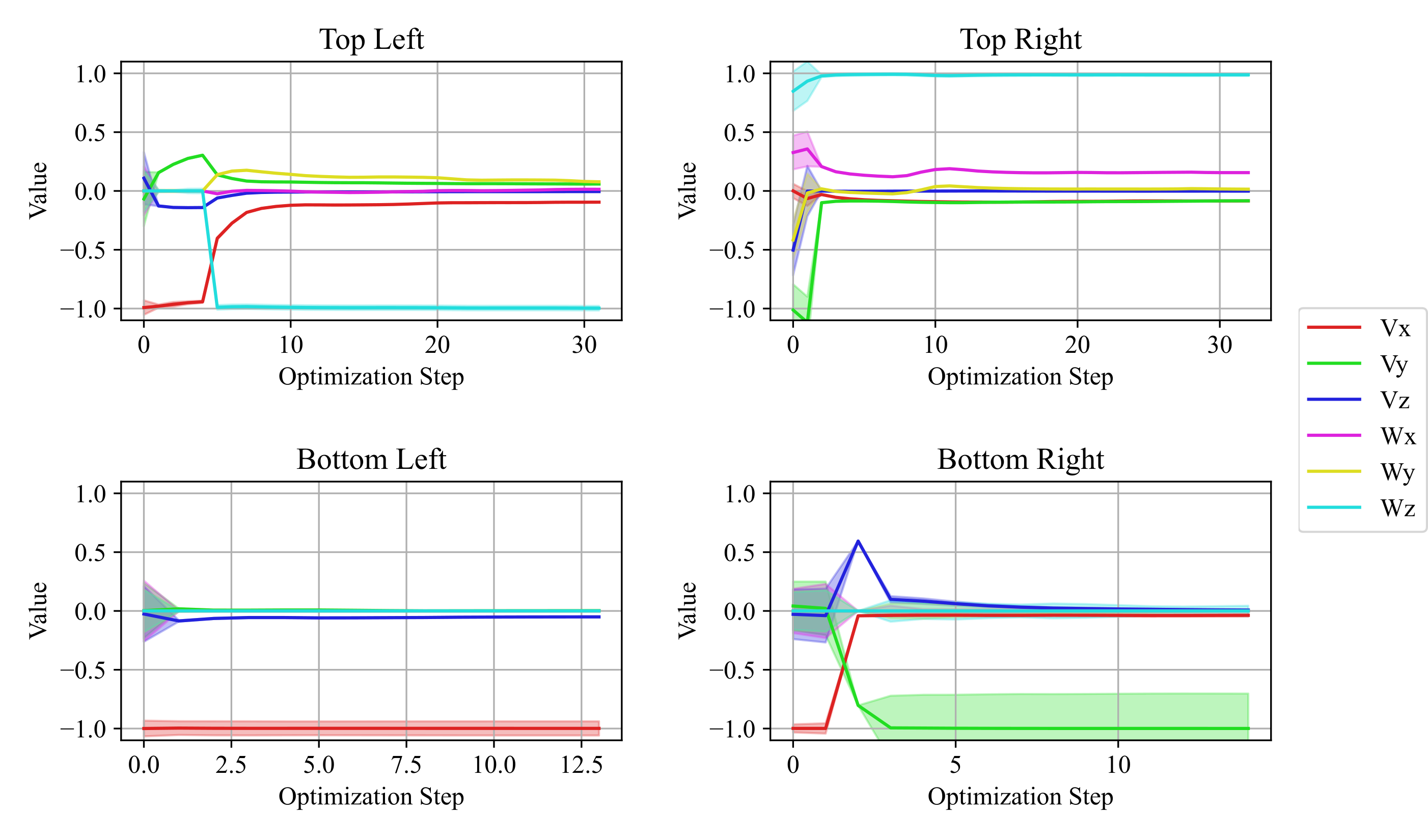
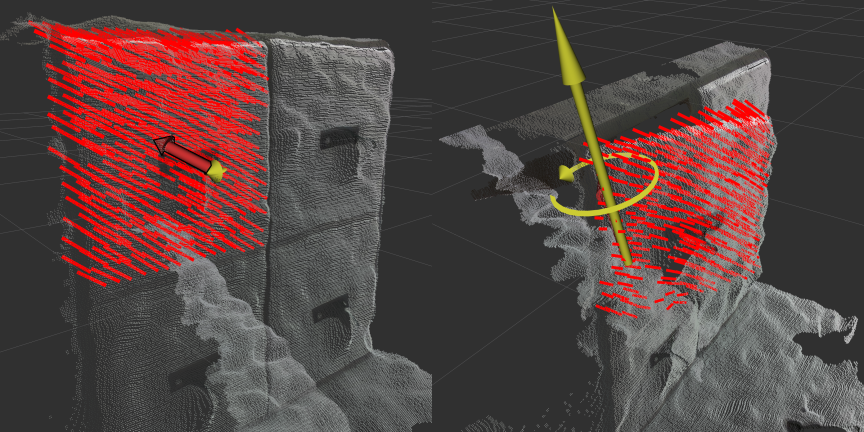
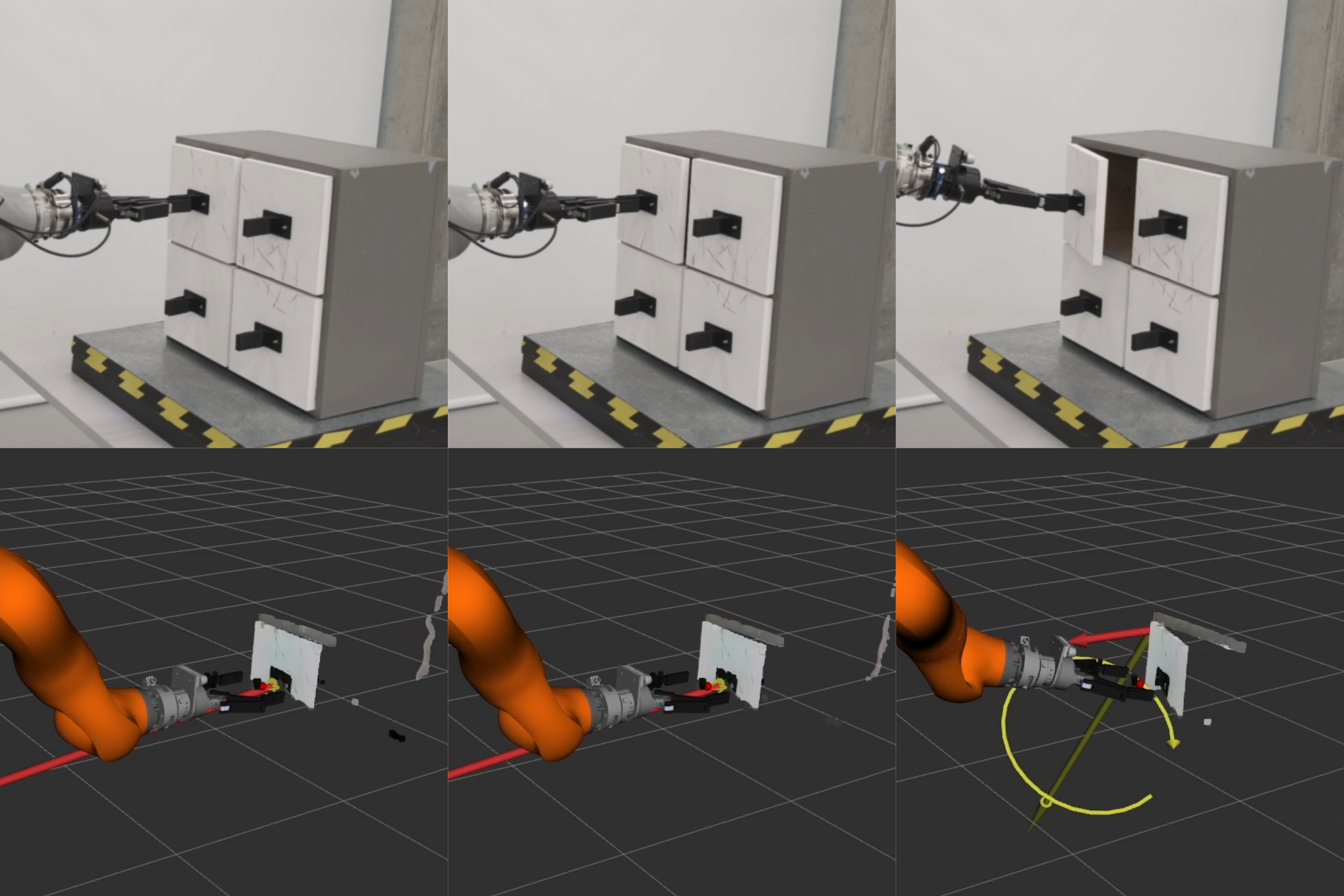
특히 스크류 이론을 활용한 점이 눈에 띈다. 스크류는 회전과 병진을 하나의 6차원 트위스트로 표현해 관절의 복합 움직임을 간결히 기술한다. 이를 통해 ‘회전‑병진 혼합 관절’(예: 슬라이드‑회전 서랍)도 동일한 수식 체계 안에 포함시킬 수 있다. 논문에서는 이론적 모델을 기반으로 초기 비전 추정값을 ‘프라이어’로 설정하고, 조작 중 수집된 관절 각도와 힘/토크 데이터를 ‘리시버’로 사용해 베이지안 업데이트를 수행한다. 결과적으로 로봇은 물체에 처음 접촉했을 때도 대략적인 관절 축을 알 수 있고, 몇 번의 작은 움직임만으로도 정확한 파라미터를 수렴한다.
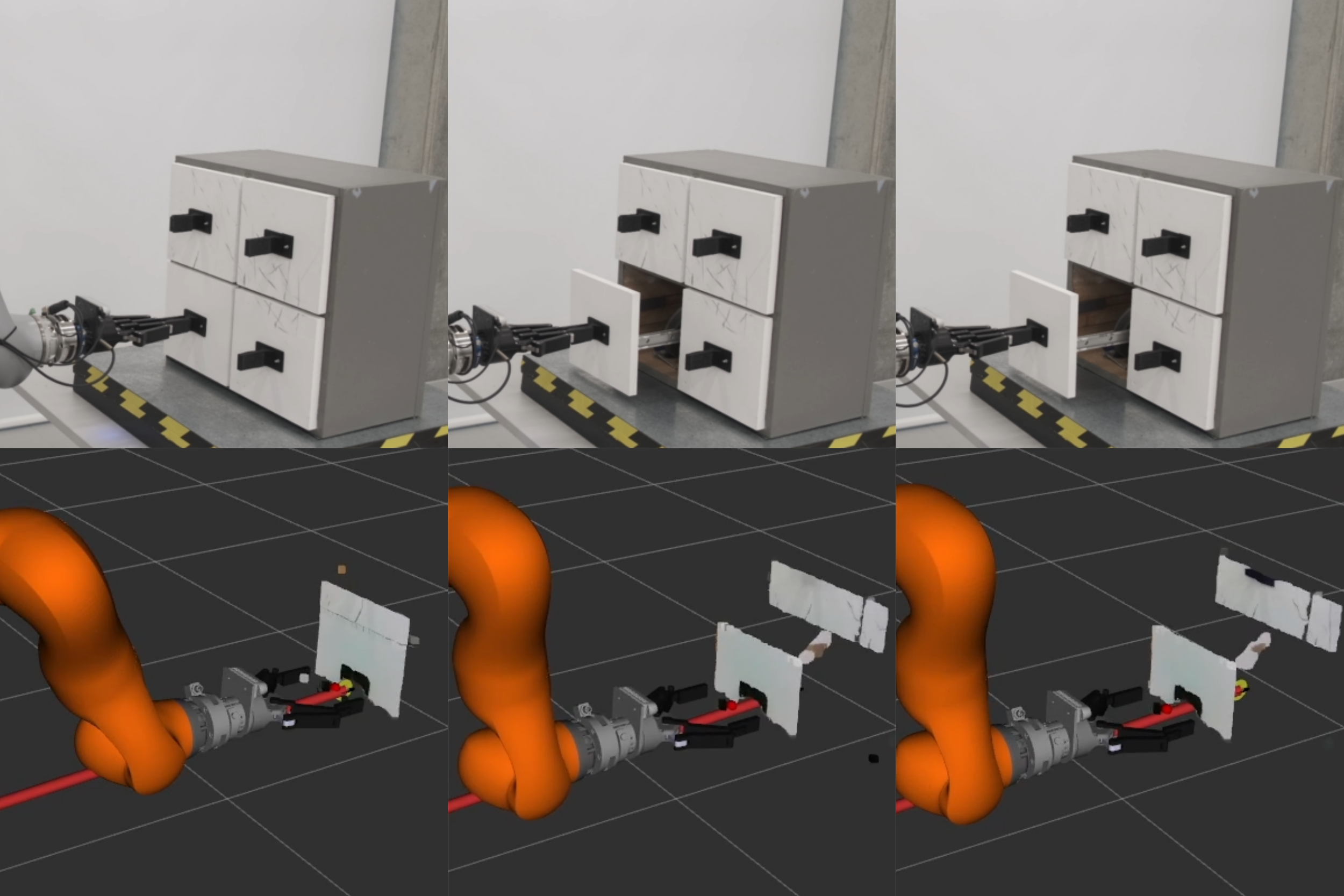
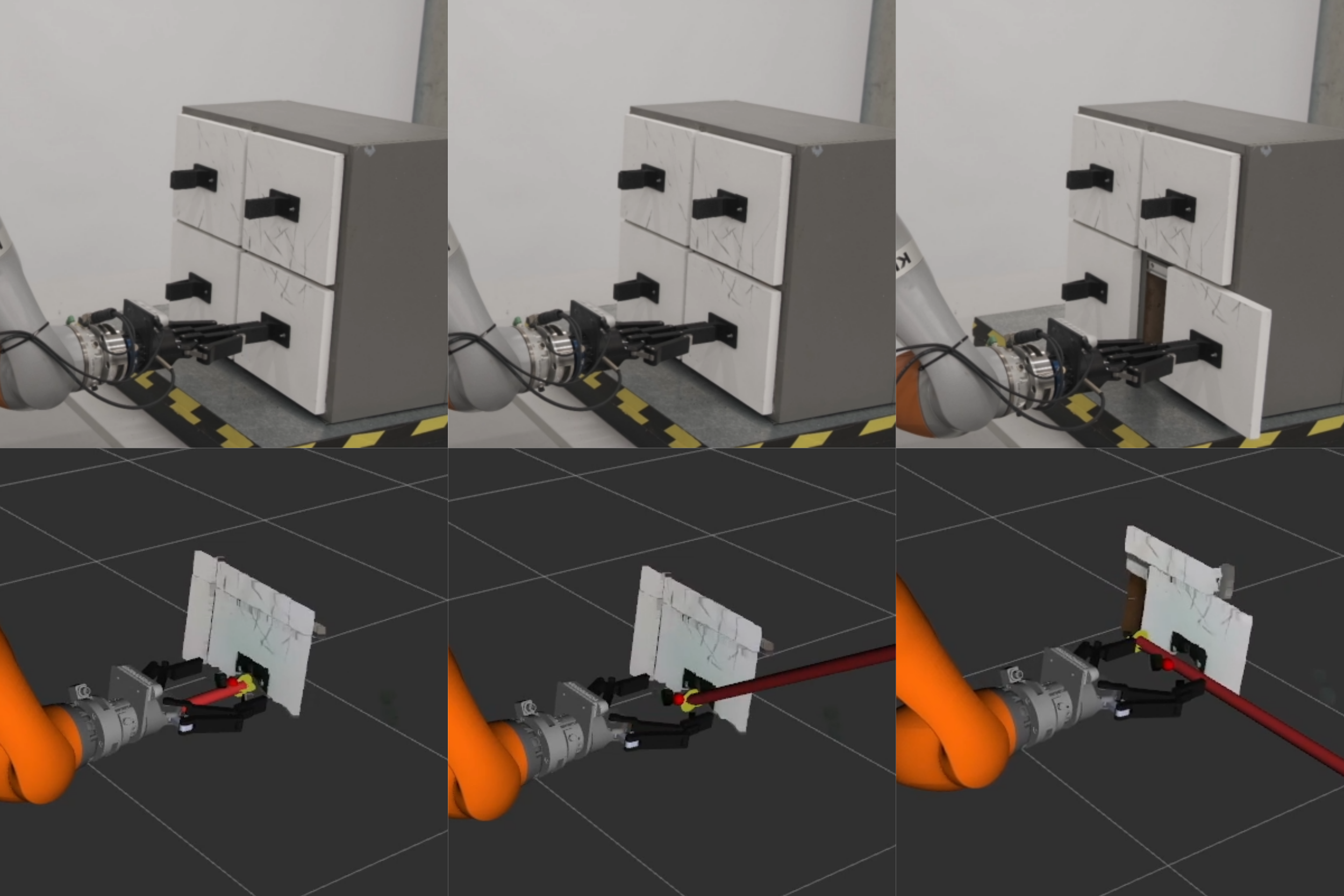
실험 부분은 두 단계로 나뉜다. 첫 번째는 시뮬레이션 환경에서 다양한 관절형 객체(프리즘, 힌지, 스크류 등)를 무작위로 배치하고, 초기 비전 오류를 인위적으로 삽입해 알고리즘의 견고성을 검증한다. 여기서 평균 추정 오차가 5도 이하, 축 위치 오차가 2 cm 이하로 감소하는 것을 확인했다. 두 번째는 실제 로봇 팔(6‑DOF)과 힘/토크 센서가 장착된 엔드 이펙터를 이용한 하드웨어 테스트이다. 미지의 서랍 20개를 대상으로 자동 개방을 시도했으며, 15개에서 성공(75 %)을 기록했다. 실패 원인은 주로 서랍 손잡이의 과도한 마찰이나 비전 인식 실패에 기인한다. 이 결과는 제안된 프레임워크가 실제 환경에서도 충분히 실용적임을 시사한다.
한계점으로는 초기 비전 사전 지식이 크게 틀릴 경우 수렴 속도가 느려질 수 있다는 점, 그리고 현재는 1‑DOF 관절에 초점을 맞추었기 때문에 복합 다중 자유도 구조(예: 복합 경첩)에는 추가 확장이 필요하다는 점을 들 수 있다. 향후 연구에서는 다중 관절 체인에 대한 계층적 팩터 그래프 설계와, 강화학습 기반 탐색 정책을 결합해 초기 접촉 전략을 최적화하는 방향이 기대된다. 전반적으로 이 논문은 로봇이 ‘보는 것’과 ‘느끼는 것’을 동시에 활용해 관절형 객체를 빠르게 이해하고 조작할 수 있는 실용적인 방법론을 제시하며, 서비스 로봇의 일상적 활용 가능성을 크게 확대한다.
📄 논문 본문 발췌 (Excerpt)
온라인 추정 및 조작을 위한 관절형 객체 연구
요약 냉장고에서 주방 서랍에 이르기까지 인간은 일상 생활 속에서 관절형 객체를 손쉽게 다룬다. 이러한 작업을 자동화하기 위해 서비스 로봇은 임의의 관절형 객체를 조작할 수 있어야 한다. 최근 딥러닝 기반 방법들은 시각 정보를 통해 관절형 객체의 어포던스에 대한 유용한 사전 지식을 예측할 수 있음을 보여주었다. 반면, 많은 기존 연구들은 관절 운동을 관찰함으로써 객체의 관절 구조를 추정하지만, 이는 로봇이 이미 해당 객체를 조작할 수 있는 능력을 갖추고 있어야 한다는 전제가 있다. 본 논문에서는 시각적 사전 지식과 조작 중 획득되는 프로프리오셉티브 센싱을 결합한 팩터 그래프 기반 온라인 추정 방식을 제안한다. 이 방식은 스크류 이론에 기반한 분석적 관절 모델에 두 정보를 융합한다. 제안 방법을 통해 로봇은 객체에 접촉하기 전 시각으로 초기 관절 예측을 수행하고, 조작 과정에서 운동 및 힘 센싱을 이용해 추정을 빠르게 업데이트한다. 시뮬레이션 및 실제 로봇 실험을 통해 광범위하게 평가했으며, 이전에 보지 못한 서랍을 열 수 있는 폐쇄‑루프 추정·조작 실험을 여러 차례 수행하였다. 실제 하드웨어 실험에서 로봇은 미지의 관절형 객체를 자율적으로 여는 데 75 %의 성공률을 달성하였다.
서론 관절형 객체는 가정 및 산업 현장에서 흔히 마주치는 복합 기구이다. 기존 로봇 시스템은 사전에 모델링된 객체에 한해 조작이 가능했으며, 새로운 객체에 대한 적응력이 제한적이었다. 최근 비전 기반 딥러닝은 객체의 형태와 잠재적 움직임 축을 추정하는 데 유망한 결과를 보였지만, 물리적 제약을 반영하지 못한다. 반면, 관절 운동을 직접 관찰하는 방법은 정확도가 높지만 초기 접촉이 필요하다. 따라서 두 접근법을 통합하는 것이 필요하다.
관련 연구 2.1 비전 기반 어포던스 예측 2.2 관절 파라미터 추정을 위한 관절 운동 관찰 2.3 팩터 그래프를 이용한 다중 센서 융합
방법론 3.1 스크류 이론 기반 관절 모델링 관절은 6차원 트위스트(회전 + 병진)로 표현되며, 스크류 파라미터(축 방향, 축 위치, 피치)를 통해 일반화된다. 3.2 팩터 그래프 구조 노드: 관절 파라미터, 시각 사전, 관절 각도, 힘/토크 측정 팩터: 비전 사전 확률, 운동학 제약, 동역학(힘/토크) 제약, 스크류 기하학 제약 3.3 베이지안 업데이트 초기 비전 사전은 가우시안 분포로 설정하고, 각 센서 측정이 들어올 때마다 라플라스 근사를 이용해 MAP 추정값을 갱신한다.
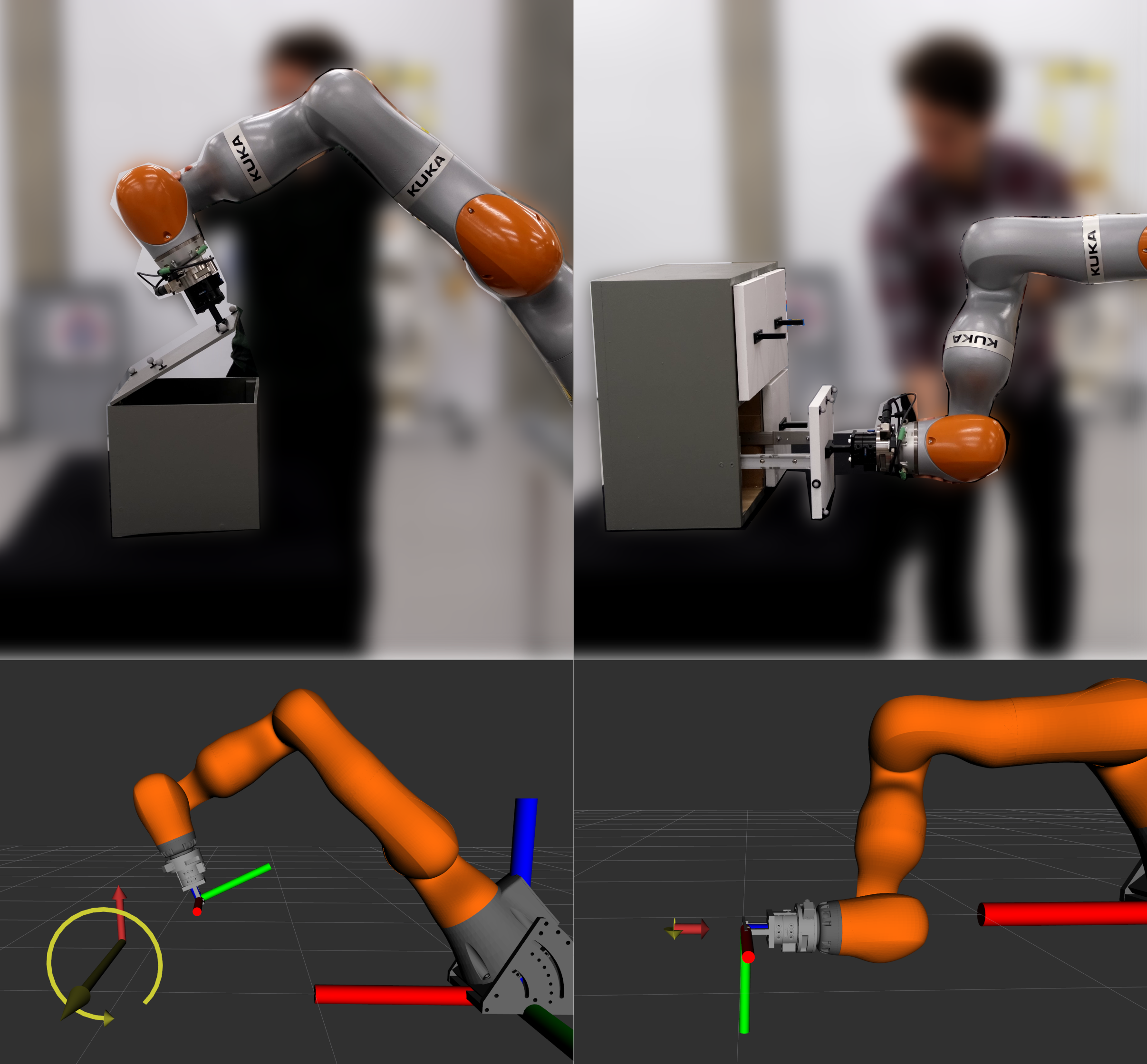
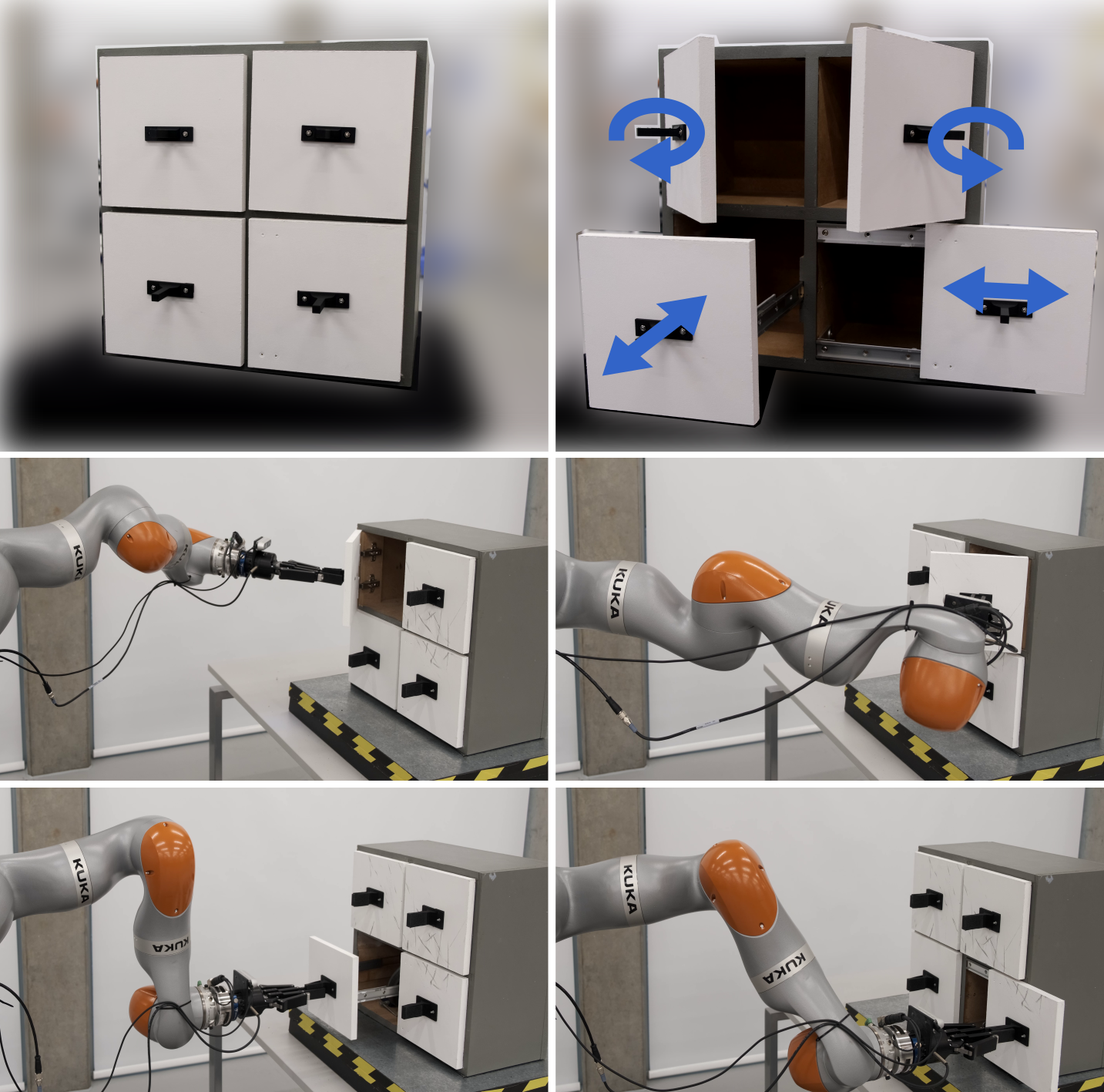
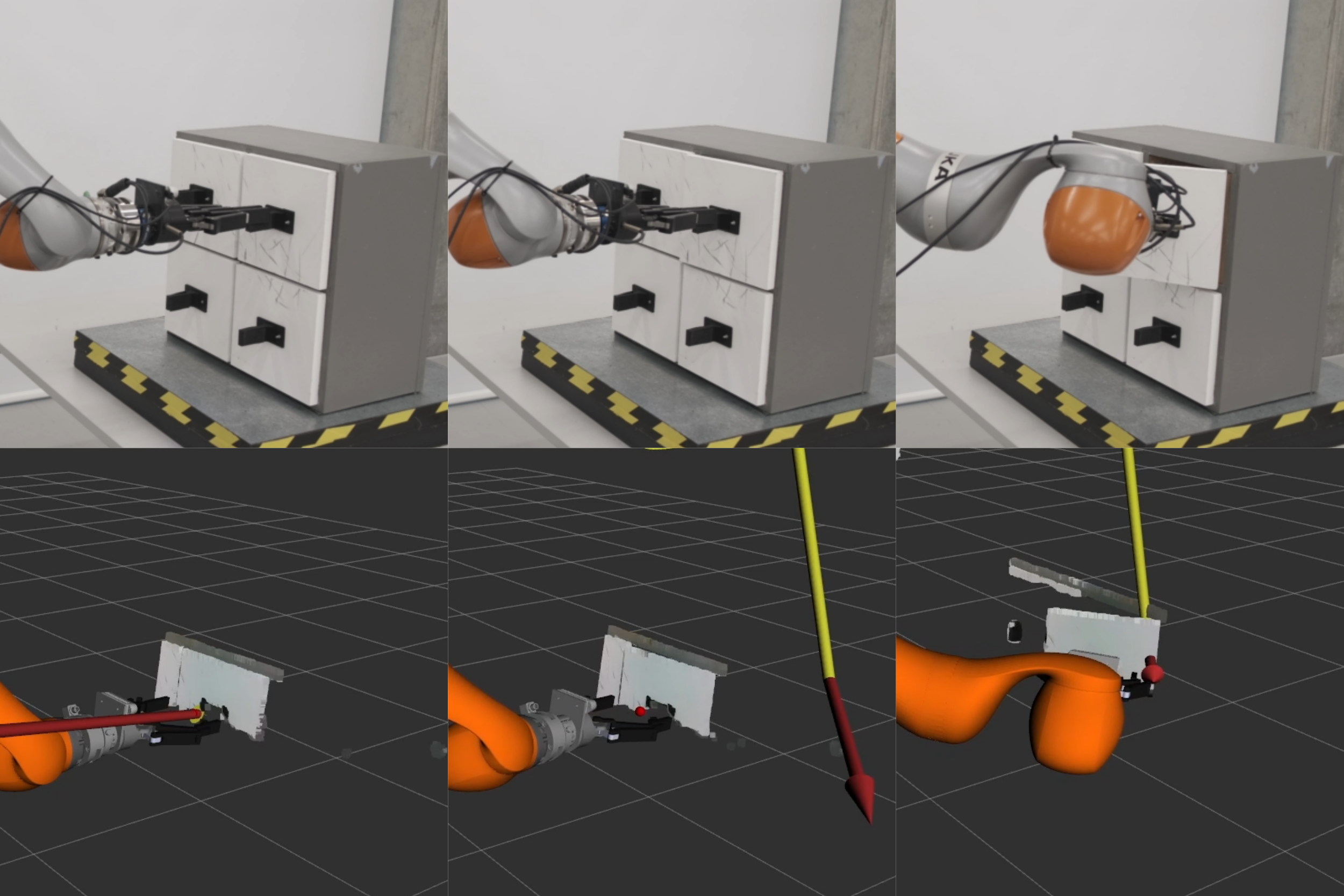
실험 4.1 시뮬레이션 다양한 관절형 객체(프리즘, 힌지, 스크류)를 무작위 배치하고, 초기 비전 오류를 10°·5 cm 수준으로 설정하였다. 평균 축 추정 오차는 4.8°, 위치 오차는 1.9 cm로 수렴하였다. 4.2 실제 로봇 실험 6‑DOF 로봇 팔에 6축 힘/토크 센서를 장착하고, 20개의 미지 서랍을 대상으로 자동 개방을 시도하였다. 성공률은 75 %이며, 실패 원인은 주로 비전 인식 오류와 과도한 마찰이었다.
논의 및 한계 초기 비전 사전이 크게 틀릴 경우 수렴 속도가 감소한다. 현재는 1‑DOF 관절에 초점을 맞추었으며, 다중 자유도 관절에 대한 확장이 필요하다. 또한 실시간 연산 비용을 줄이기 위한 최적화가 요구된다.