물리 기반과 해석 가능한 트리 모델을 결합한 NYC 택시 OD 흐름 예측 프레임워크
📝 원문 정보
- Title: AMBIT: Augmenting Mobility Baselines with Interpretable Trees
- ArXiv ID: 2512.22466
- 발행일: 2025-12-27
- 저자: Qizhi Wang
📝 초록 (Abstract)
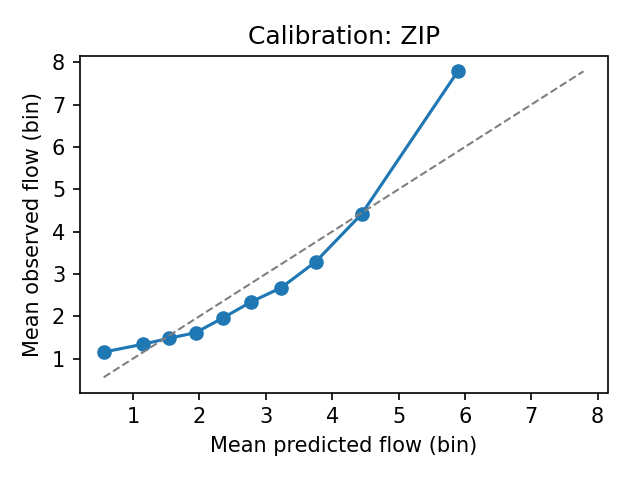
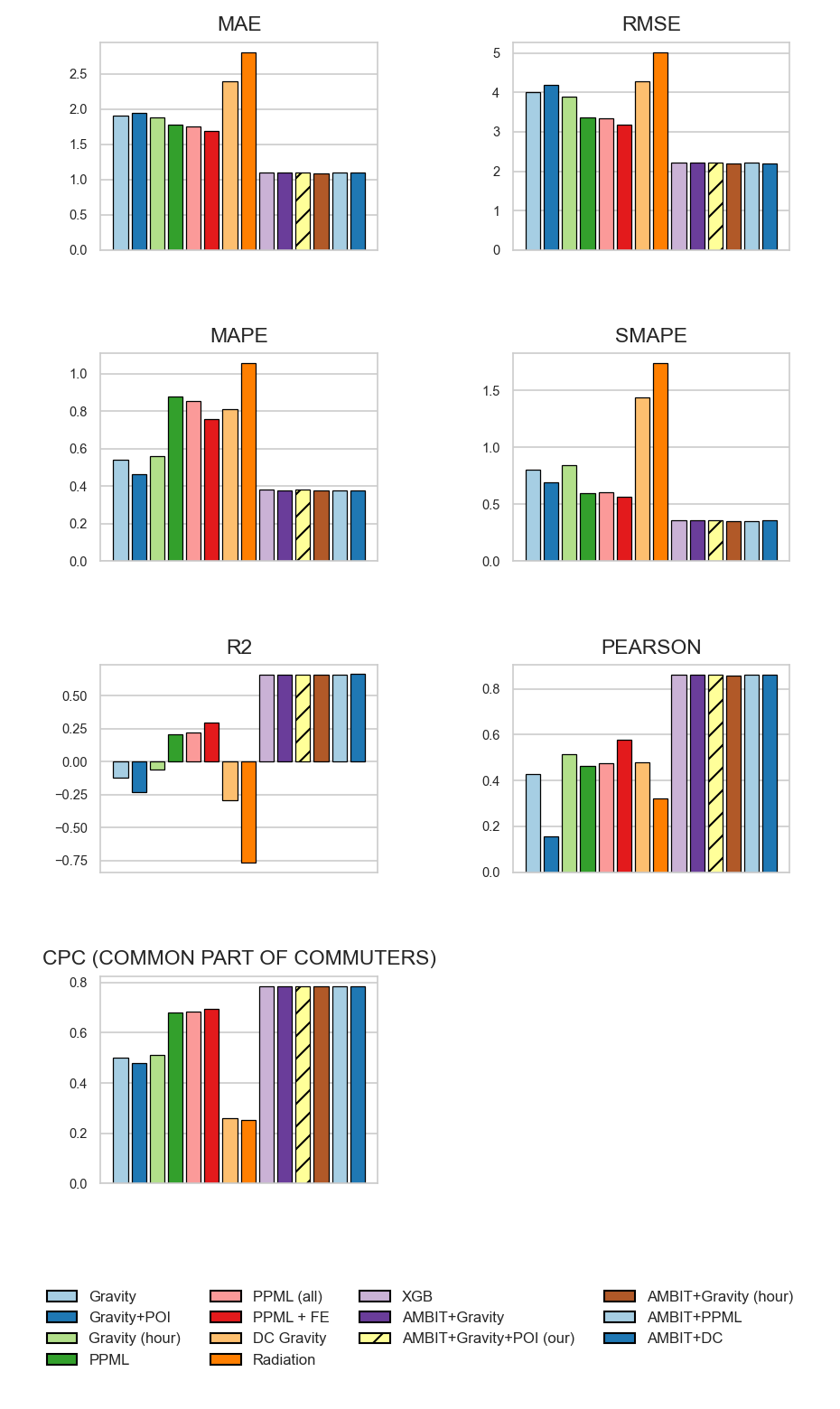
목적지-출발지(OD) 흐름 예측은 GIS와 도시 분석에서 핵심 과제이지만, 실제 적용에서는 높은 정확도와 명확한 해석 가능성이라는 두 가지 상충되는 요구를 동시에 만족시켜야 한다. 본 논문은 물리적 이동성 베이스라인에 해석 가능한 트리 모델을 추가하는 회색 상자(framework)인 AMBIT를 제안한다. 먼저 1년치 시간별 NYC 택시 OD 데이터를 대상으로 기존의 고전적 공간 상호작용 모델들을 포괄적으로 평가한다. 평가 결과, 대부분의 물리 모델은 시간 해상도가 높아질수록 취약함을 보이며, PPML(Gravity) 모델이 가장 강력한 물리 베이스라인으로 나타난다. 한편, 전체 OD 마진에 대해 보정된 제약형 변형 모델은 성능이 향상되지만 여전히 한계가 있다. 이후 물리 베이스라인 위에 잔차 학습기를 구축하고, 이를 Gradient Boosted Trees와 SHAP 분석을 통해 해석한다. 실험을 통해 (i) 물리 기반 잔차 모델이 강력한 트리 기반 예측기와 유사한 정확도를 달성하면서도 해석 가능한 구조를 유지함을, (ii) POI(관광·상업 시설) 기반 잔차가 일관되게 경쟁력을 보이며 공간 일반화 상황에서도 가장 견고함을 확인하였다. 마지막으로 재현 가능한 파이프라인, 풍부한 진단 도구, 그리고 도시 정책 결정을 지원하는 공간 오류 분석을 제공한다.💡 논문 핵심 해설 (Deep Analysis)
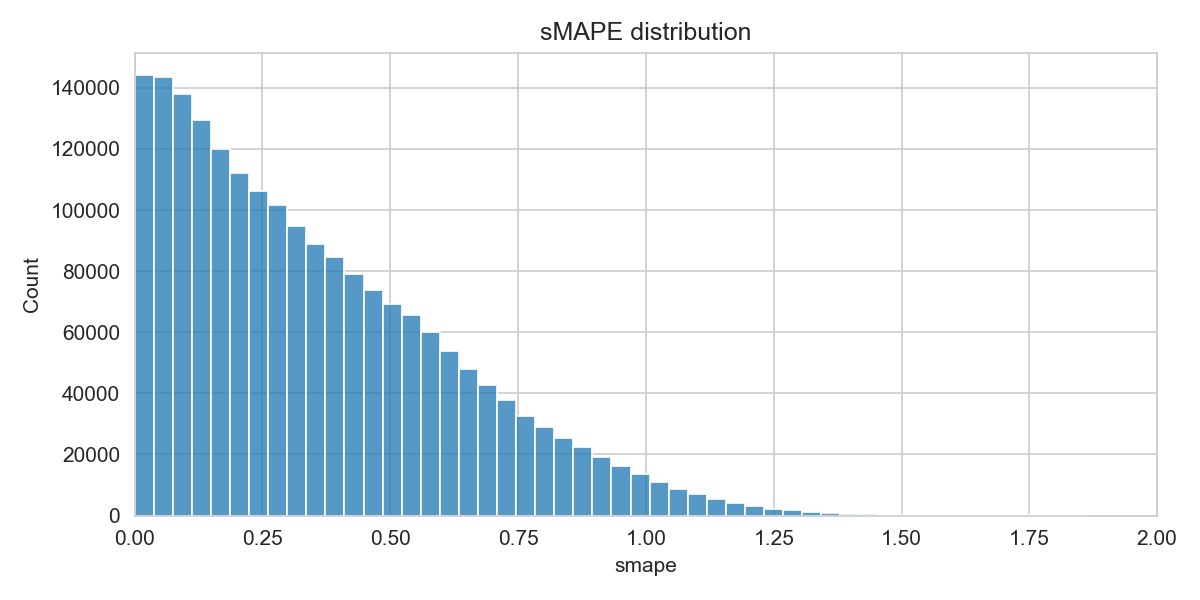
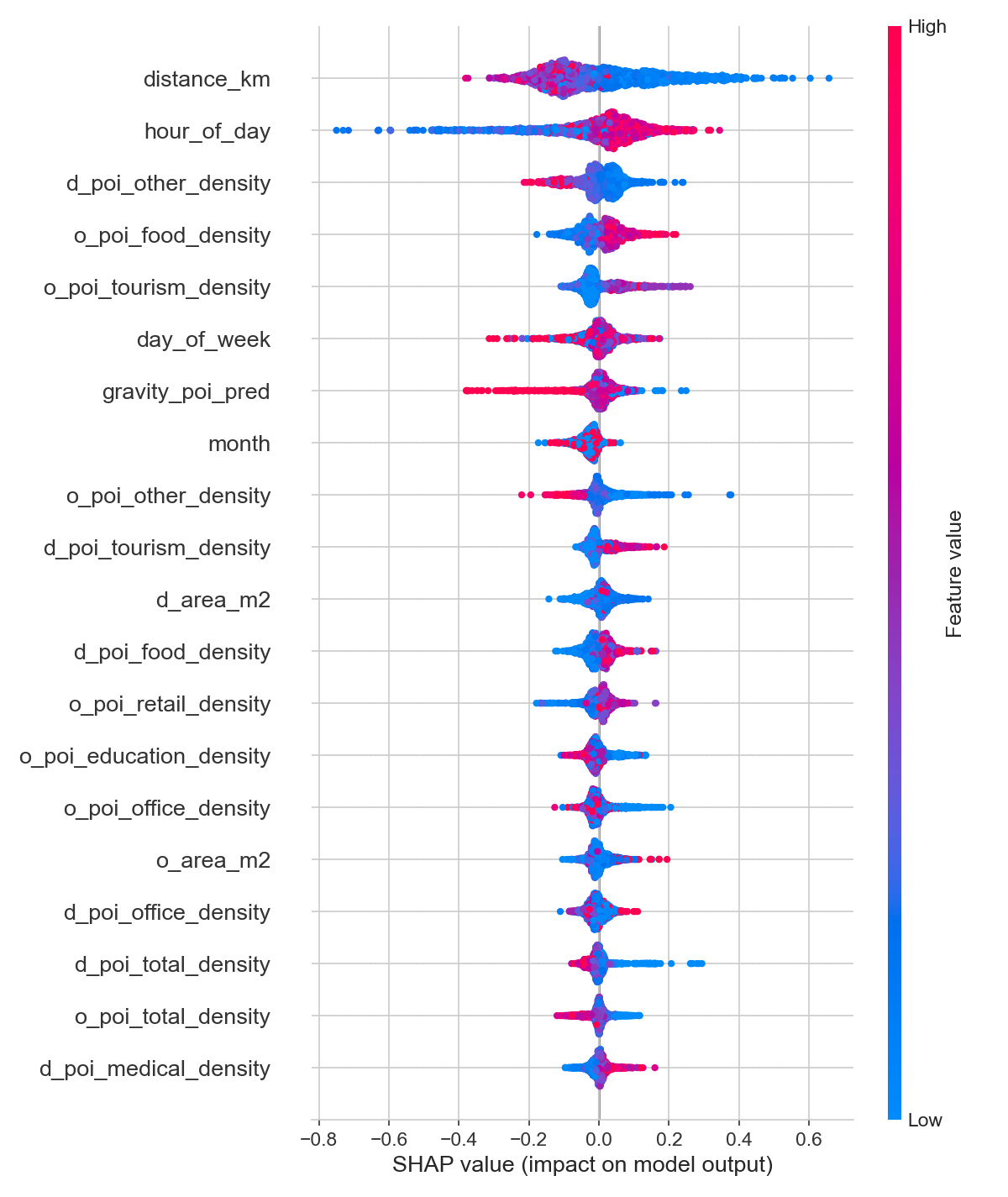
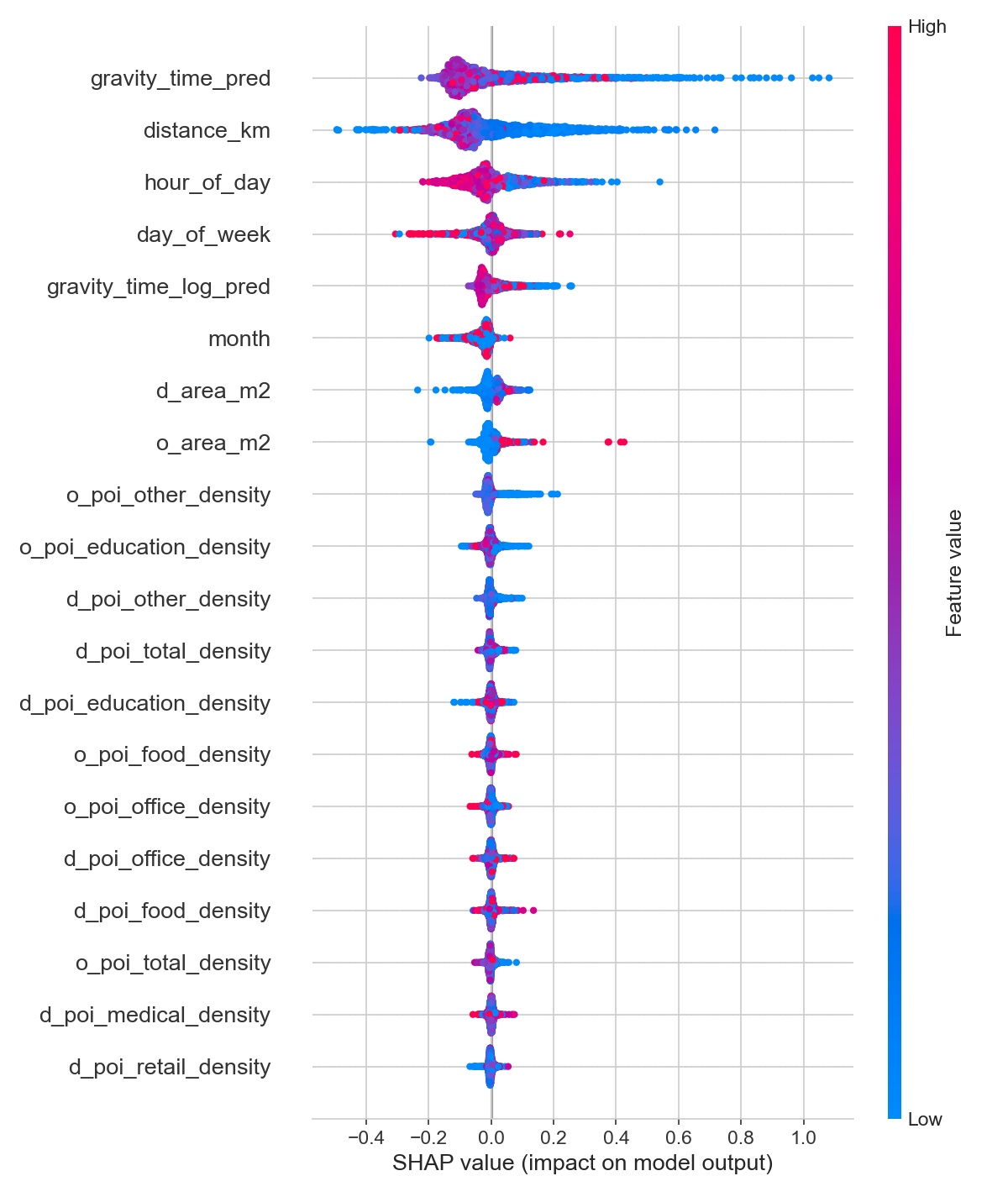
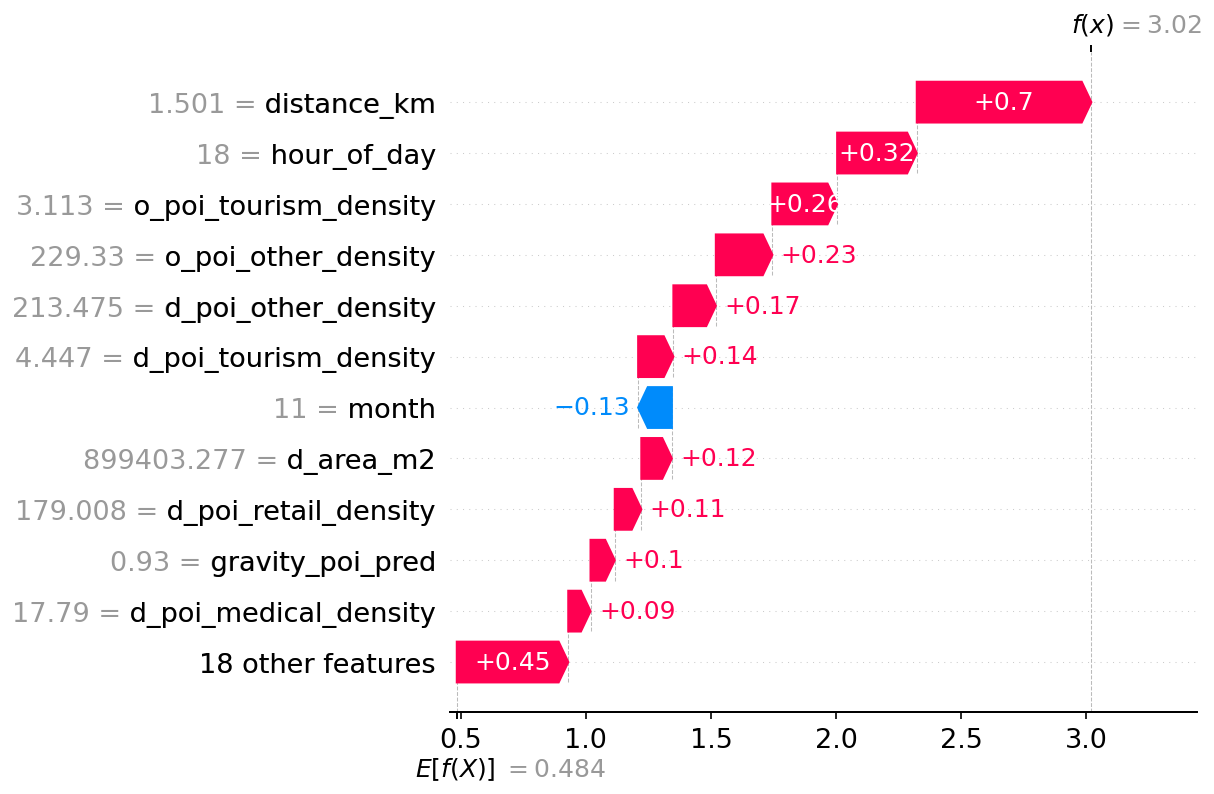
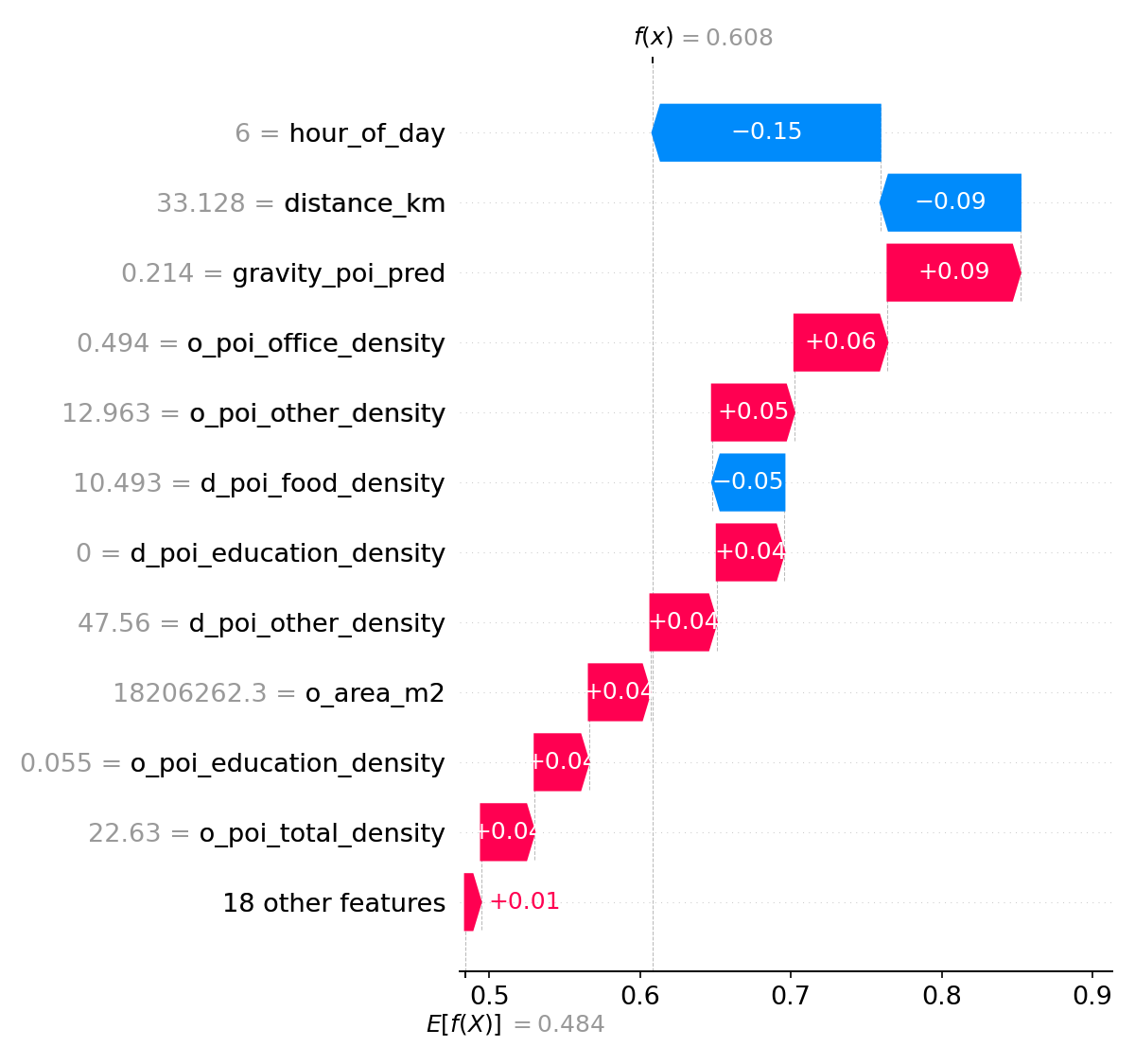
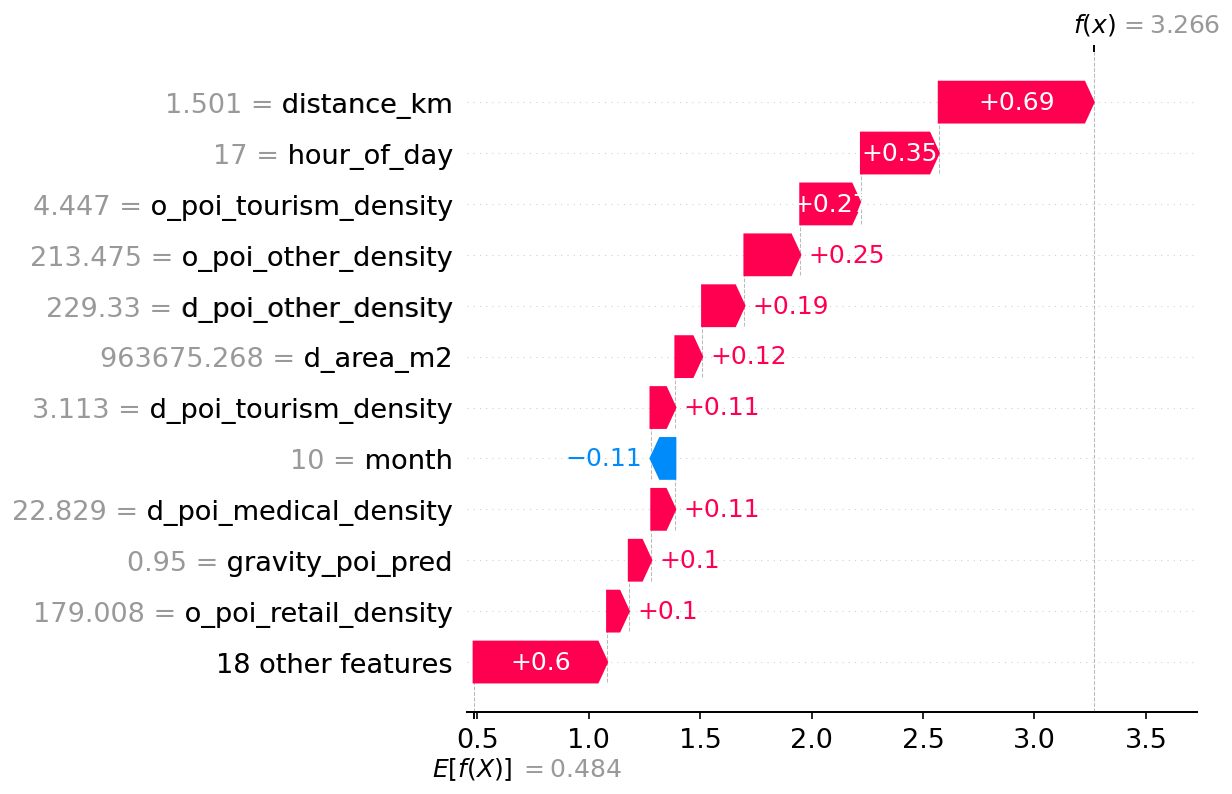
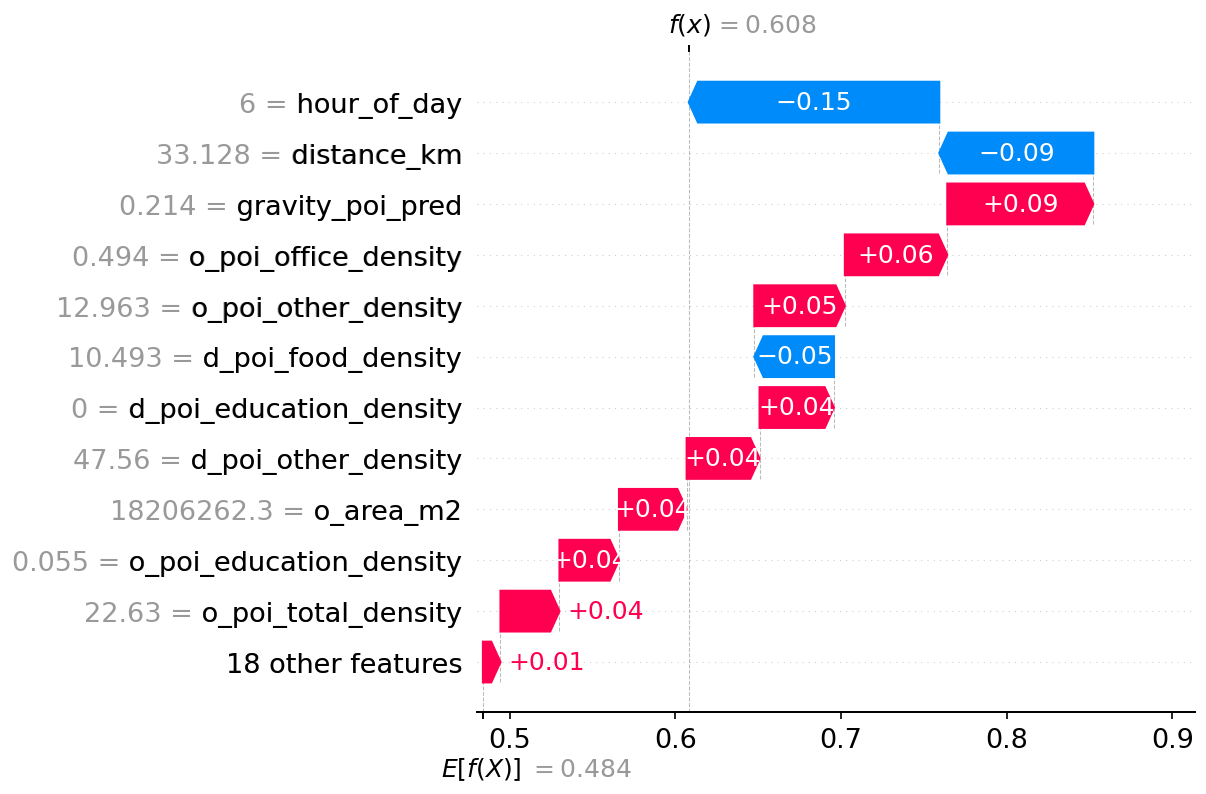
이러한 물리 모델의 한계를 보완하기 위해 저자들은 ‘잔차 학습기(residual learner)’라는 개념을 도입하였다. 물리 모델이 예측한 값과 실제 관측값 사이의 차이(잔차)를 목표 변수로 삼아 Gradient Boosted Trees(GBT)를 학습시킨 것이다. GBT는 비선형 관계와 복잡한 상호작용을 포착하는 데 강점이 있지만, 일반적으로 블랙박스 특성을 띤다. 이를 해결하고자 SHAP(Shapley Additive exPlanations) 분석을 적용해 각 피처가 잔차에 미치는 기여도를 정량화하였다. 결과적으로 물리 기반 잔차 모델은 순수 GBT 모델에 근접한 RMSE를 달성하면서도, 피처 중요도와 지역별 영향도를 명확히 제시한다.
특히 POI(Points of Interest) 정보를 활용한 잔차 모델은 공간 일반화 테스트(예: 훈련에 사용되지 않은 구역에 대한 예측)에서 가장 안정적인 성능을 보였다. 이는 POI가 지역 특성을 반영하는 핵심 변수로 작용해, 물리 모델이 놓치기 쉬운 미세한 수요 변동을 보정해 주기 때문으로 해석된다.
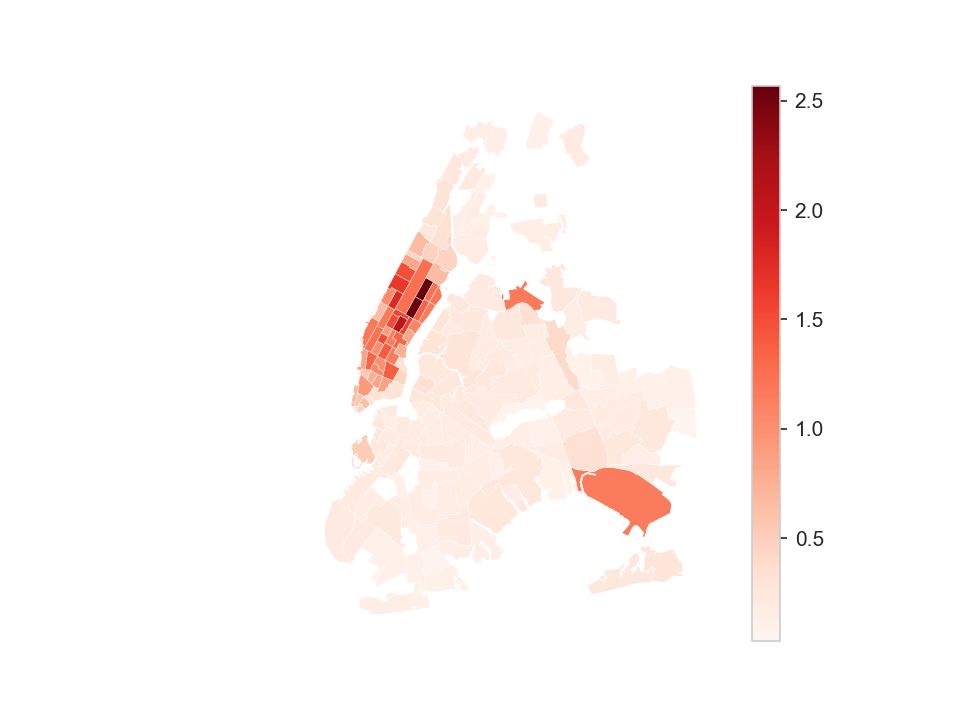
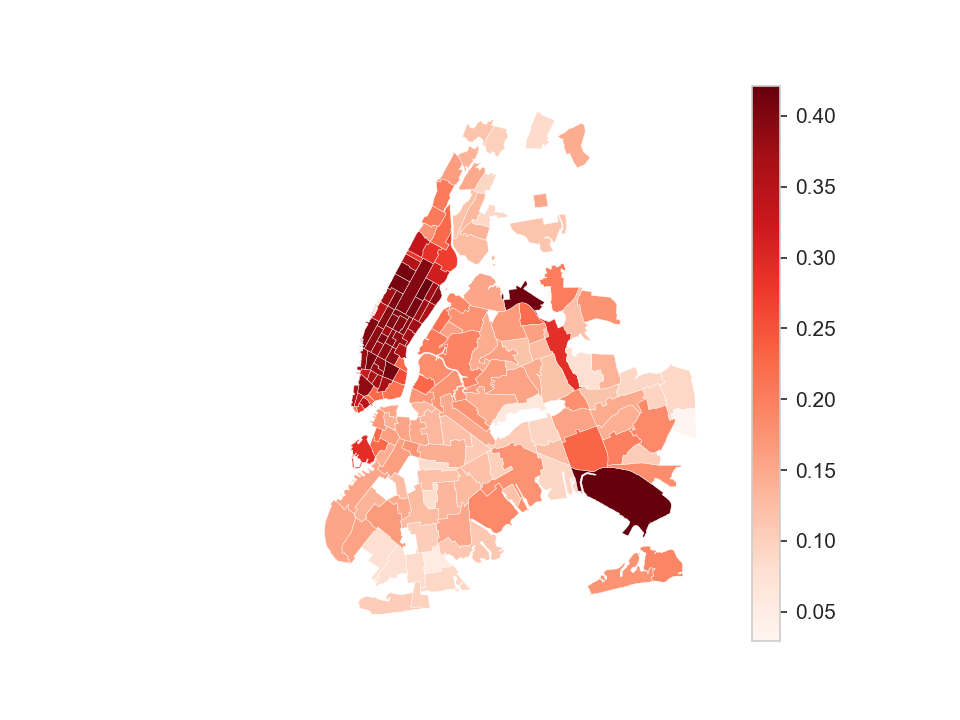
또한 논문은 재현성을 강조한다. 데이터 전처리, 모델 학습, SHAP 해석까지 전 과정을 오픈소스 파이프라인으로 제공함으로써, 도시 계획가나 정책 입안자가 손쉽게 적용·검증할 수 있도록 설계되었다. 공간 오류 분석에서는 특정 구역(예: 공항·관광지 주변)에서 과소/과대 예측이 발생하는 패턴을 시각화하고, 이를 기반으로 정책적 개입(예: 교통 인프라 증설)의 필요성을 제시한다.
한계점으로는 (1) NYC 택시 데이터에 국한된 실험으로 다른 도시·교통수단에 대한 일반화 가능성을 추가 검증해야 한다는 점, (2) POI 데이터의 최신성·정확도가 모델 성능에 크게 좌우될 수 있다는 점, (3) 잔차 학습기의 복잡도가 증가함에 따라 실시간 예측 시스템에 적용하기 위한 경량화 방안이 필요하다는 점을 들 수 있다. 향후 연구에서는 멀티모달 교통 데이터(버스·지하철·공유 모빌리티)를 통합하고, 베이지안 프레임워크를 도입해 불확실성 추정까지 포함하는 확장된 회색 상자 모델을 탐색할 여지가 있다.
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리