FPGA를 활용한 3D 포인트 클라우드 모델의 고속 처리: HLS4PC 프레임워크
📝 원문 정보
- Title: HLS4PC: A Parametrizable Framework For Accelerating Point-Based 3D Point Cloud Models on FPGA
- ArXiv ID: 2512.22139
- 발행일: 2025-12-11
- 저자: Amur Saqib Pal, Muhammad Mohsin Ghaffar, Faisal Shafait, Christian Weis, Norbert Wehn
📝 초록 (Abstract)
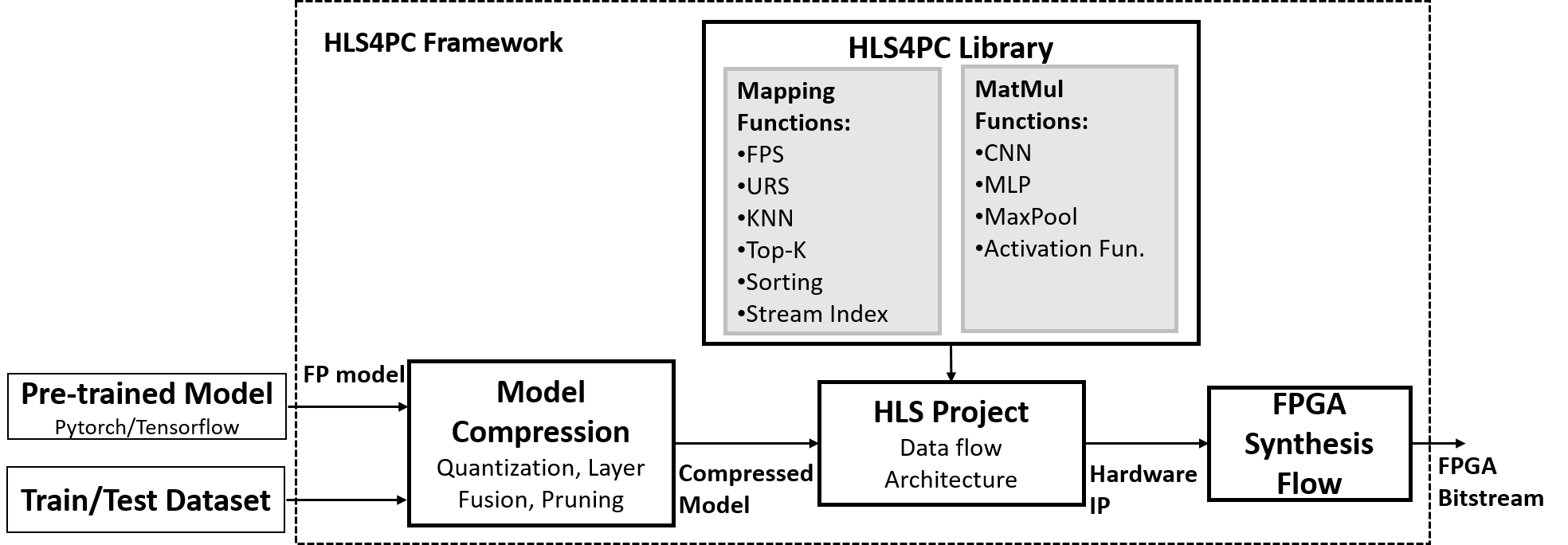
포인트 기반 3D 포인트 클라우드 모델은 분류/분할을 위한 신경망(NN) 레이어와 함께 계산 및 메모리 집약적인 매핑 함수를 사용하며, 서버 등급의 그래픽 처리 장치(GPU)에서 실행됩니다. 3D 포인트 클라우드 데이터의 희소성과 비구조화된 특성은 높은 메모리와 계산 요구 사항을 초래하여 GPU의 활용도 부족으로 인해 실시간 성능이 저하되며, 안전성이 중요한 응용 프로그램에서는 이러한 문제가 더욱 심각합니다. 이를 해결하기 위해 우리는 HLS4PC라는 파라미터화 가능한 고수준 합성(HLS) 프레임워크를 제시합니다. 우리의 접근 방식은 FPGA의 병렬 처리와 알고리즘 최적화를 활용하여 매핑과 NN 함수의 효율적인 고정 소수점 구현을 가능하게 합니다. 우리는 최신 PointMLP-Elite 모델에 대한 여러 하드웨어 인식 압축 기법을 탐구하고, Farthest Point Sampling(FPS)을 Uniform Random Sampling(URS)으로 대체하며, 매개변수 양자화, 레이어 융합 및 입력 포인트 가위질 등을 적용하여 PointMLP-Lite라는 약 2%의 정확도 하락만으로 복잡성이 4배 적은 변형을 생성합니다. 또한, PointMLP-Lite의 FPGA 가속화는 이전 연구보다 3.56배 높은 처리량을 제공하며, 우리의 구현은 GPU와 중앙 처리 장치(CPU) 구현에 비해 각각 2.3배와 22배 더 높은 처리량을 달성합니다.💡 논문 핵심 해설 (Deep Analysis)
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리
Reference
이 글은 ArXiv의 공개 자료를 바탕으로 AI가 자동 번역 및 요약한 내용입니다.
저작권은 원저자에게 있으며, 인류 지식 발전에 기여한 연구자분들께 감사드립니다.