능동 주행과 자율 주행에서의 뇌파 기반 정신 상태 비교 연구
📝 원문 정보
- Title: Understanding Mental States in Active and Autonomous Driving with EEG
- ArXiv ID: 2512.09190
- 발행일: 2025-12-09
- 저자: Prithila Angkan, Paul Hungler, Ali Etemad
📝 초록 (Abstract)
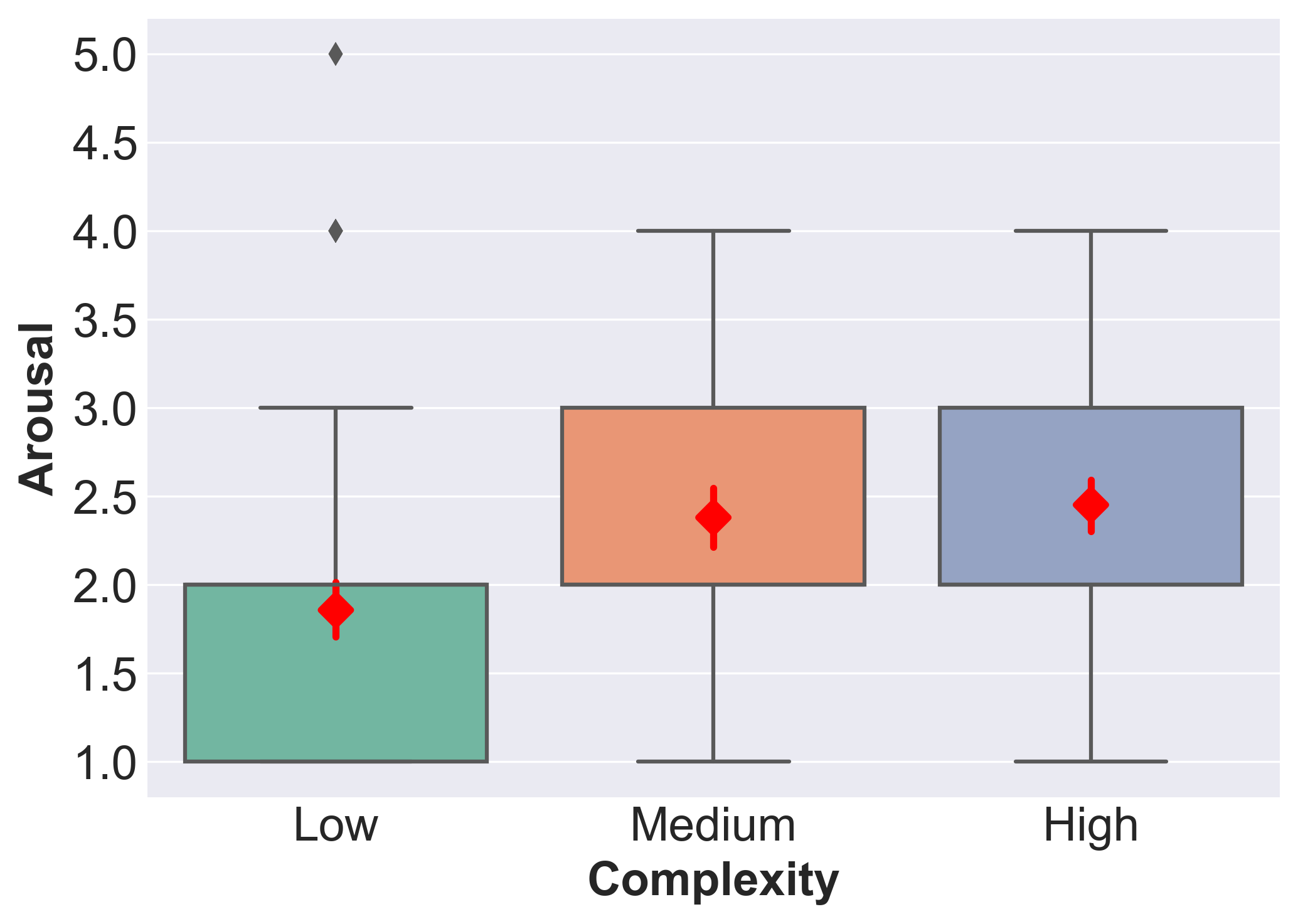
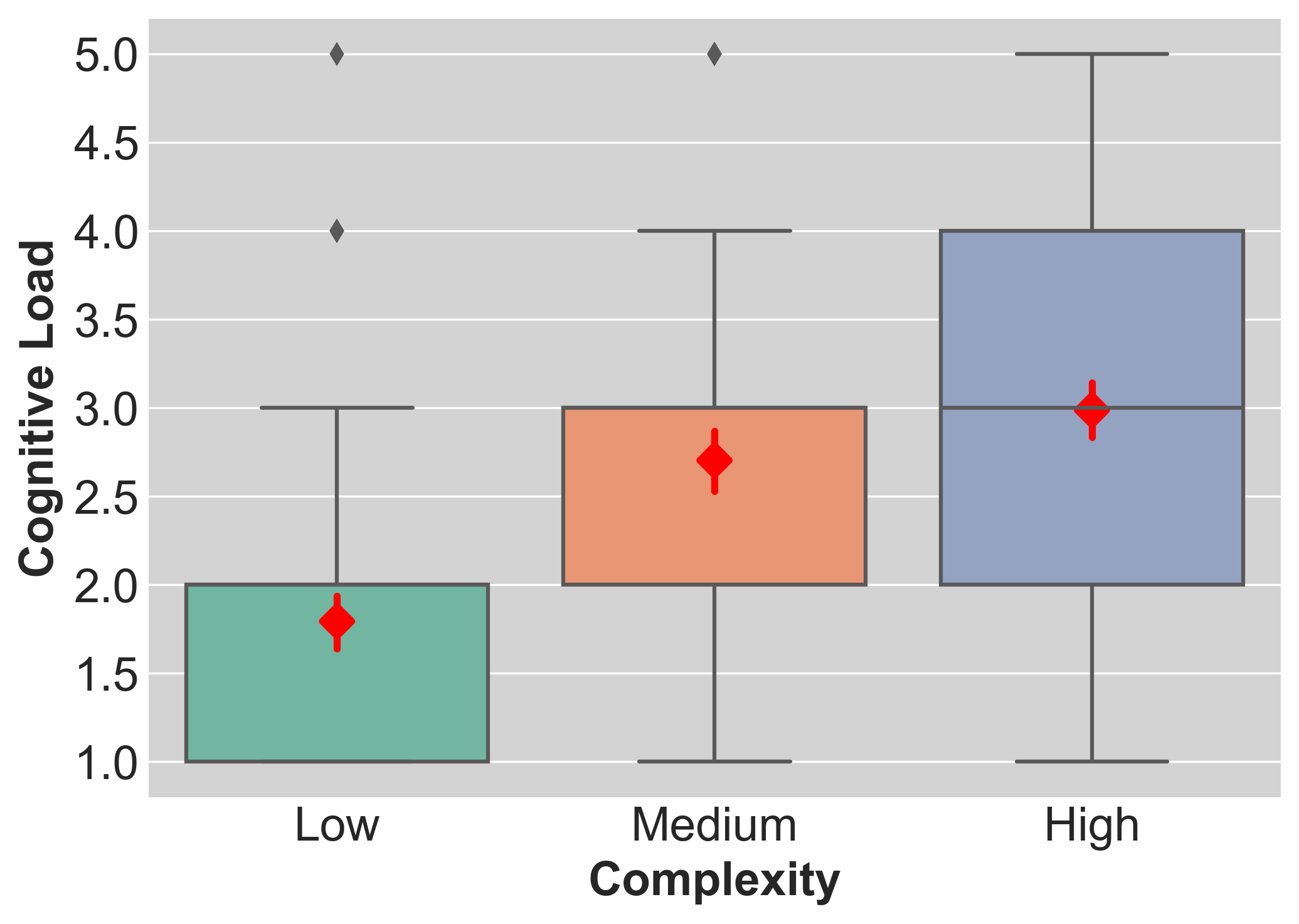
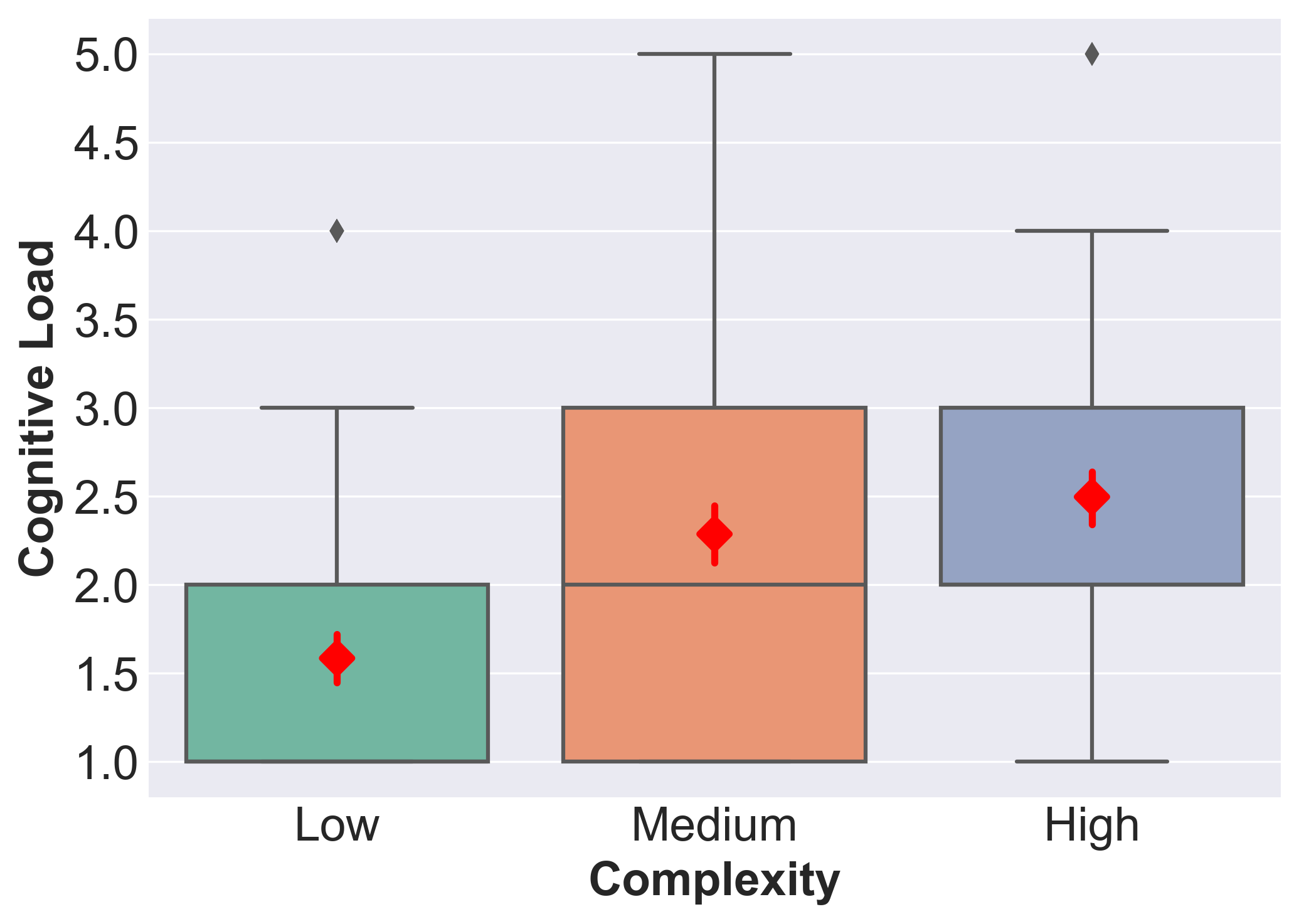
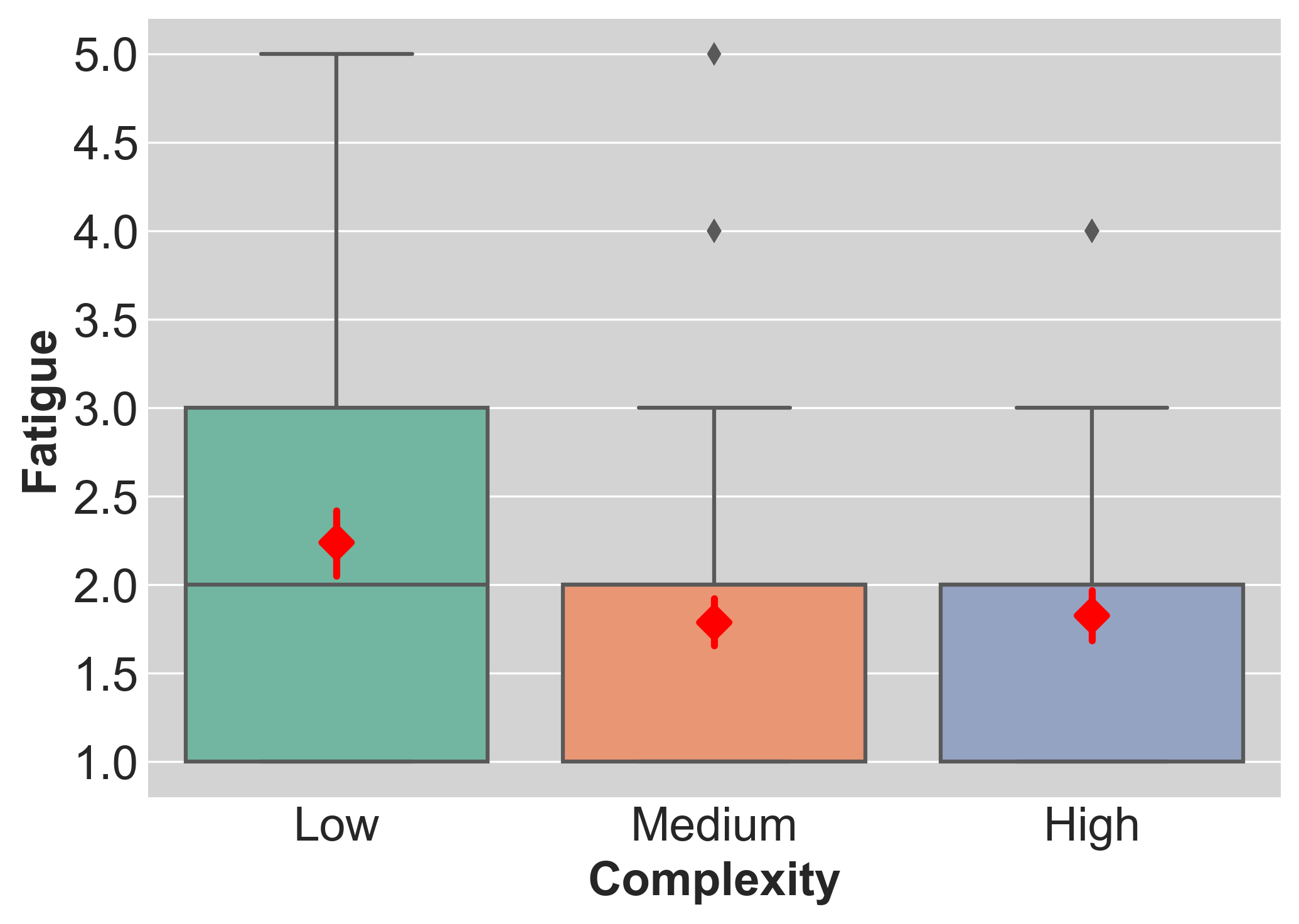
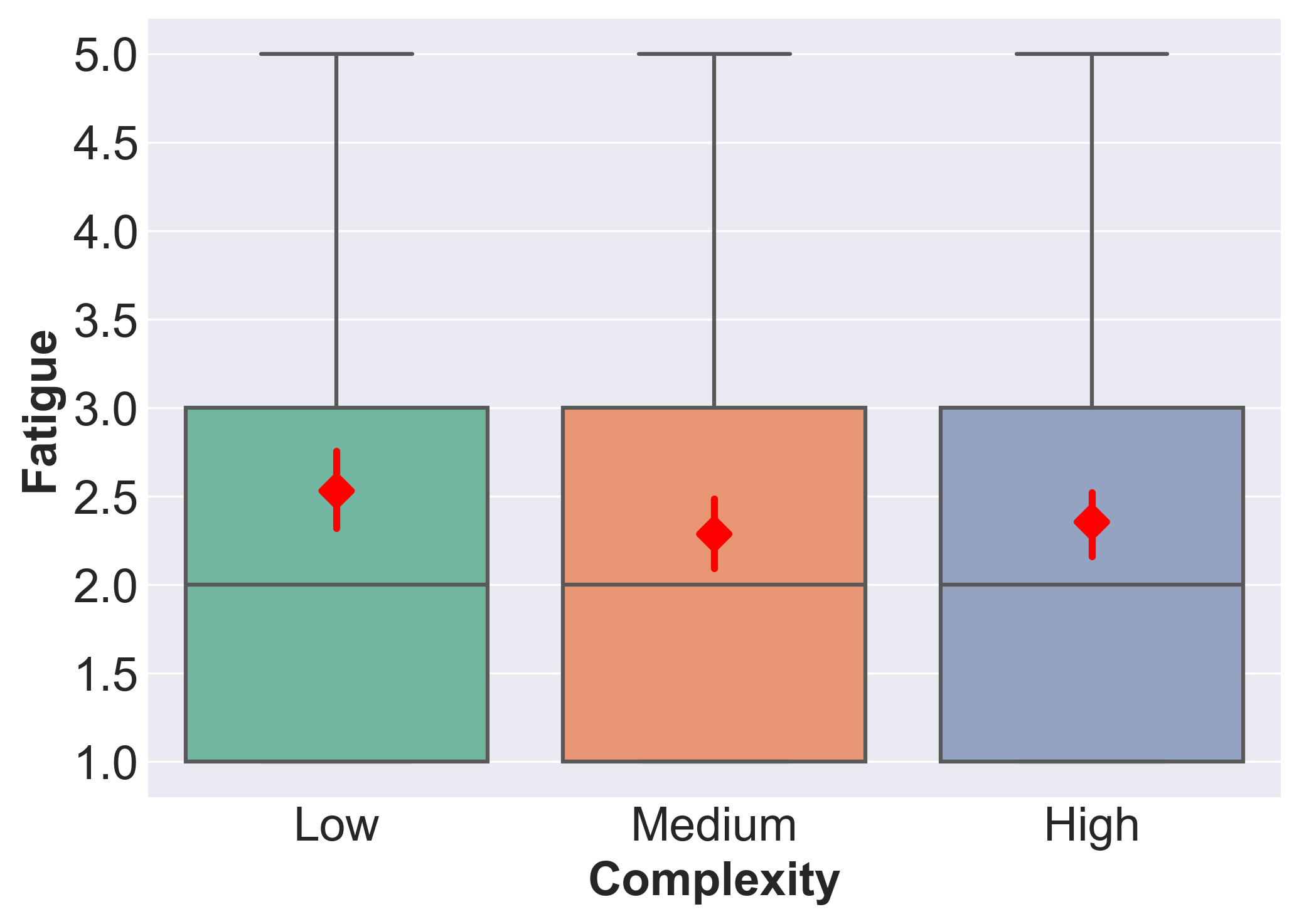
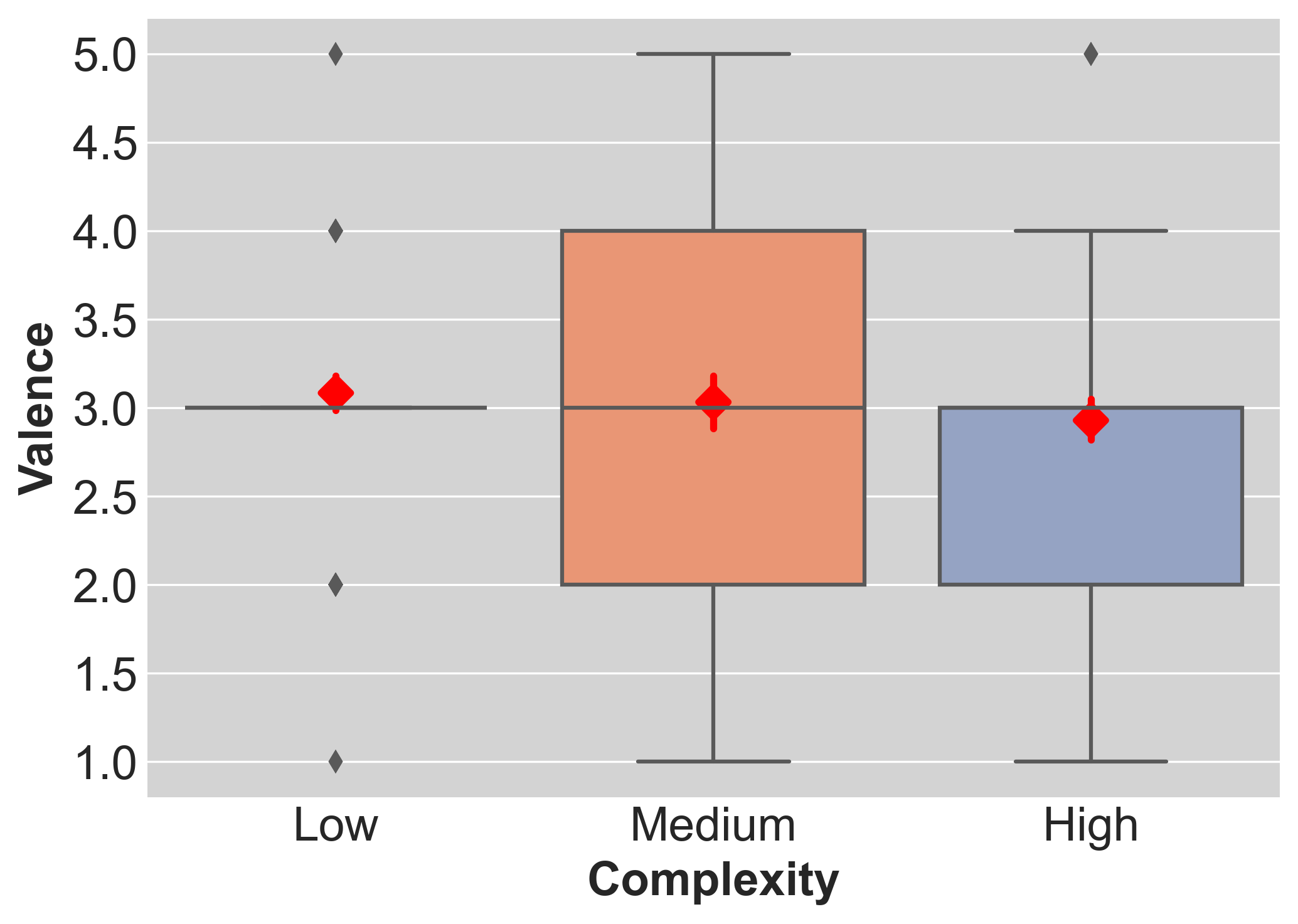
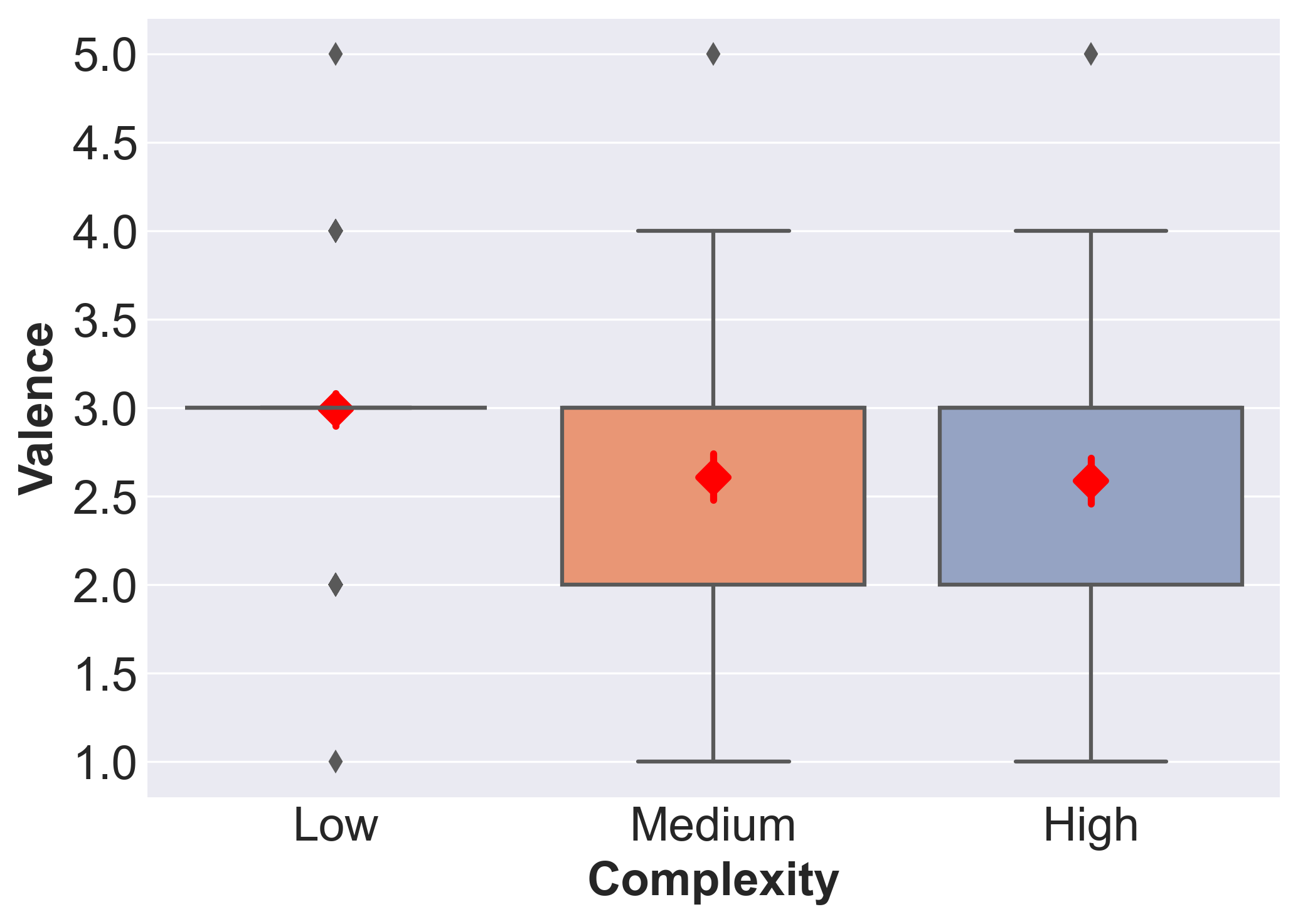
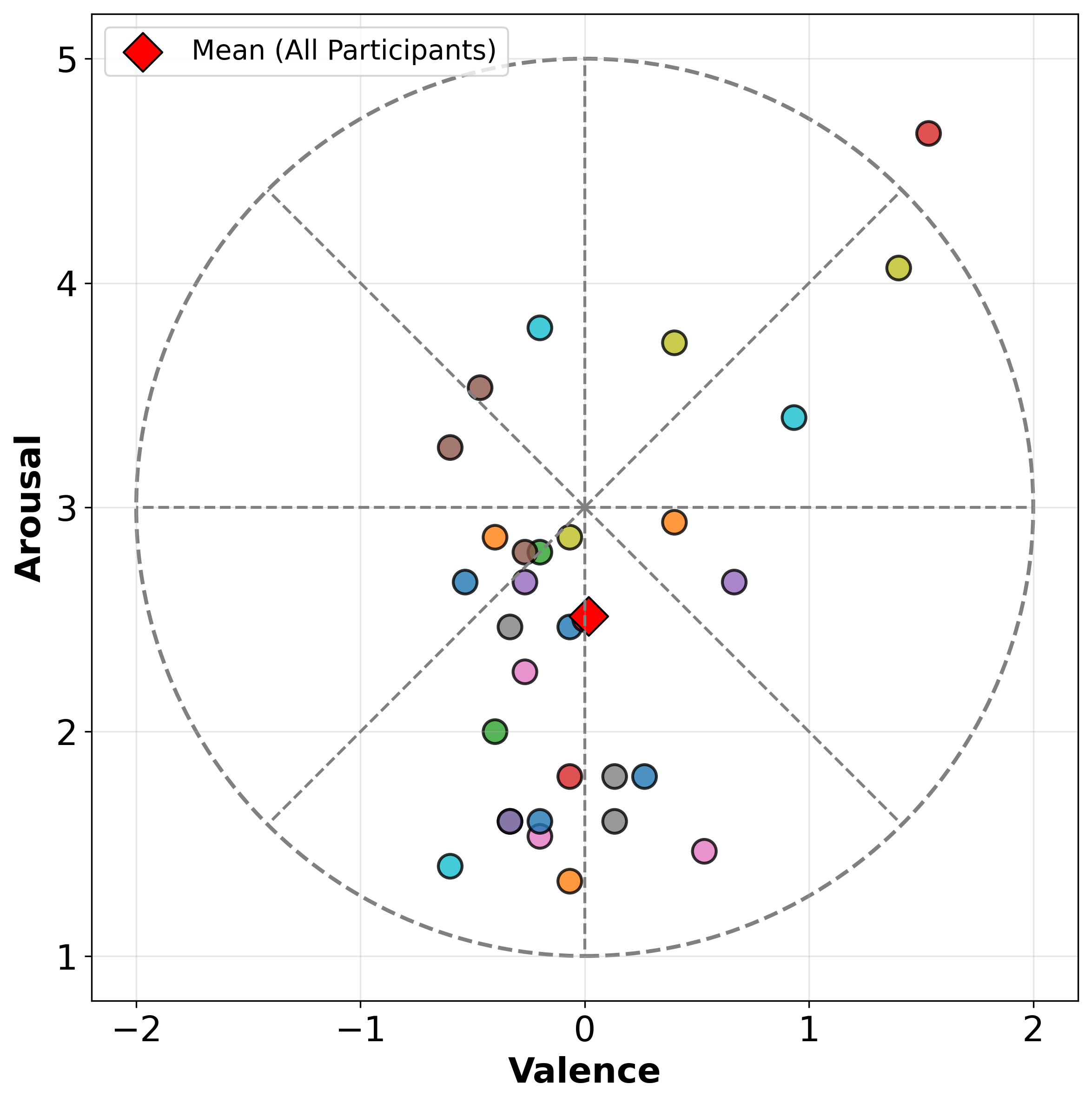
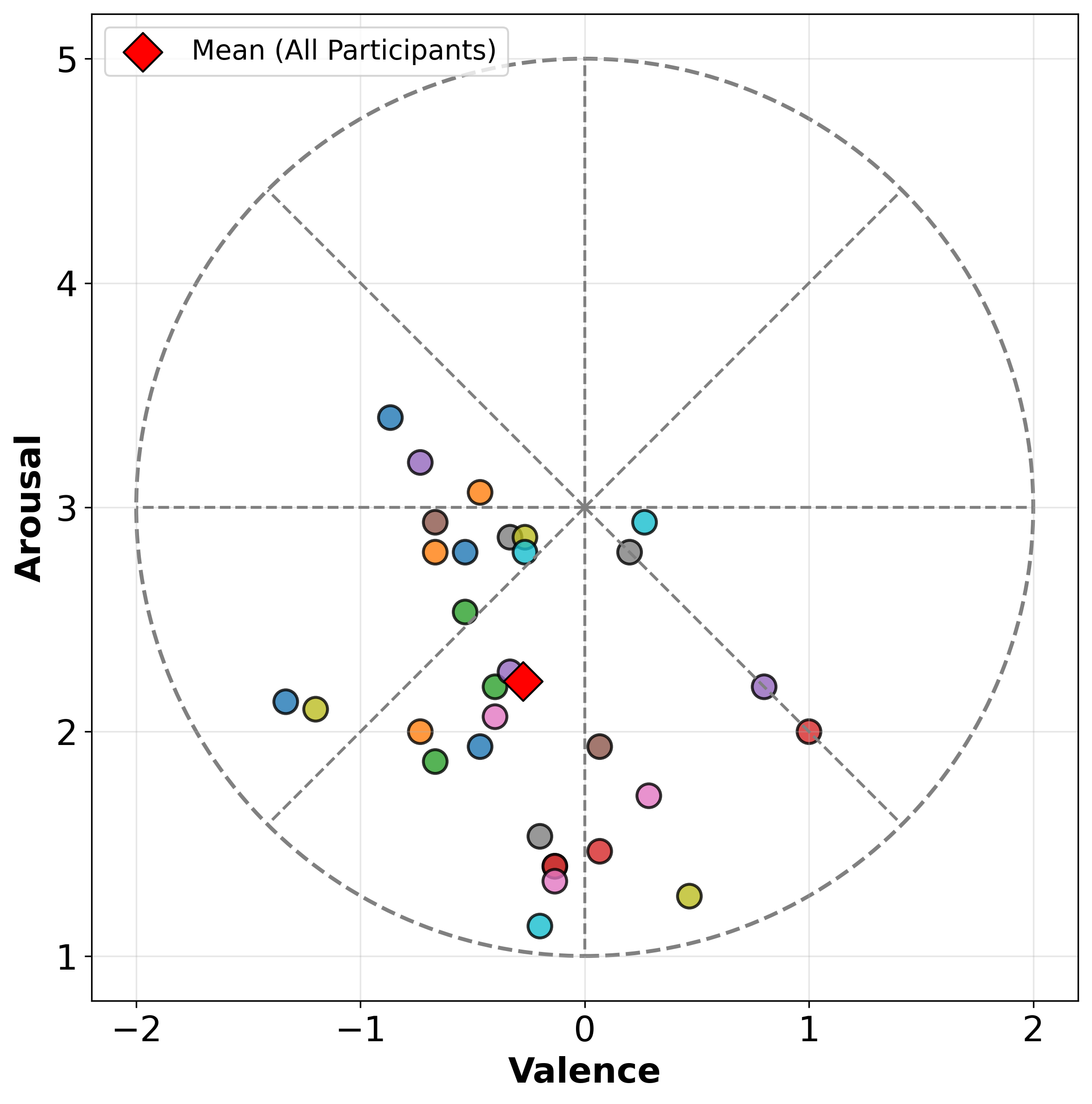
운전자가 능동 운전과 자율 운전 상황에서 경험하는 인지 부하, 피로, 정서적 가치 및 각성을 EEG로 비교한 최초의 연구이다. 31명의 참가자가 세 가지 난이도 수준에서 동일한 과제를 수행하도록 하였으며, 시간적 패턴, 과제 난이도 효과, 채널별 활성 차이를 분석하였다. 두 운전 모드 모두 난이도에 따라 유사한 추세를 보였지만, 정신 상태의 강도와 뇌 활성 패턴은 크게 달라져 분포 이동이 확인되었다. 전이 학습 실험에서는 능동 운전 데이터로 학습한 모델이 자율 운전에, 그 반대도 마찬가지로 일반화 성능이 낮았다. 이러한 차이는 주로 운동 참여와 주의 요구도의 차이에서 비롯되며, 이는 공간·시간적 EEG 활성 패턴의 차이로 나타난다. 자율 운전에서는 전체 피질 활성도가 낮지만, 운전자가 개입 준비, 감정 반응, 단조로 인한 수동 피로 등을 겪으며 인지 부하·피로·정서 변동을 지속적으로 보인다. 결과는 자율 차량용 운전자 모니터링 시스템 개발 시 시나리오별 데이터와 모델이 필요함을 강조한다.💡 논문 핵심 해설 (Deep Analysis)

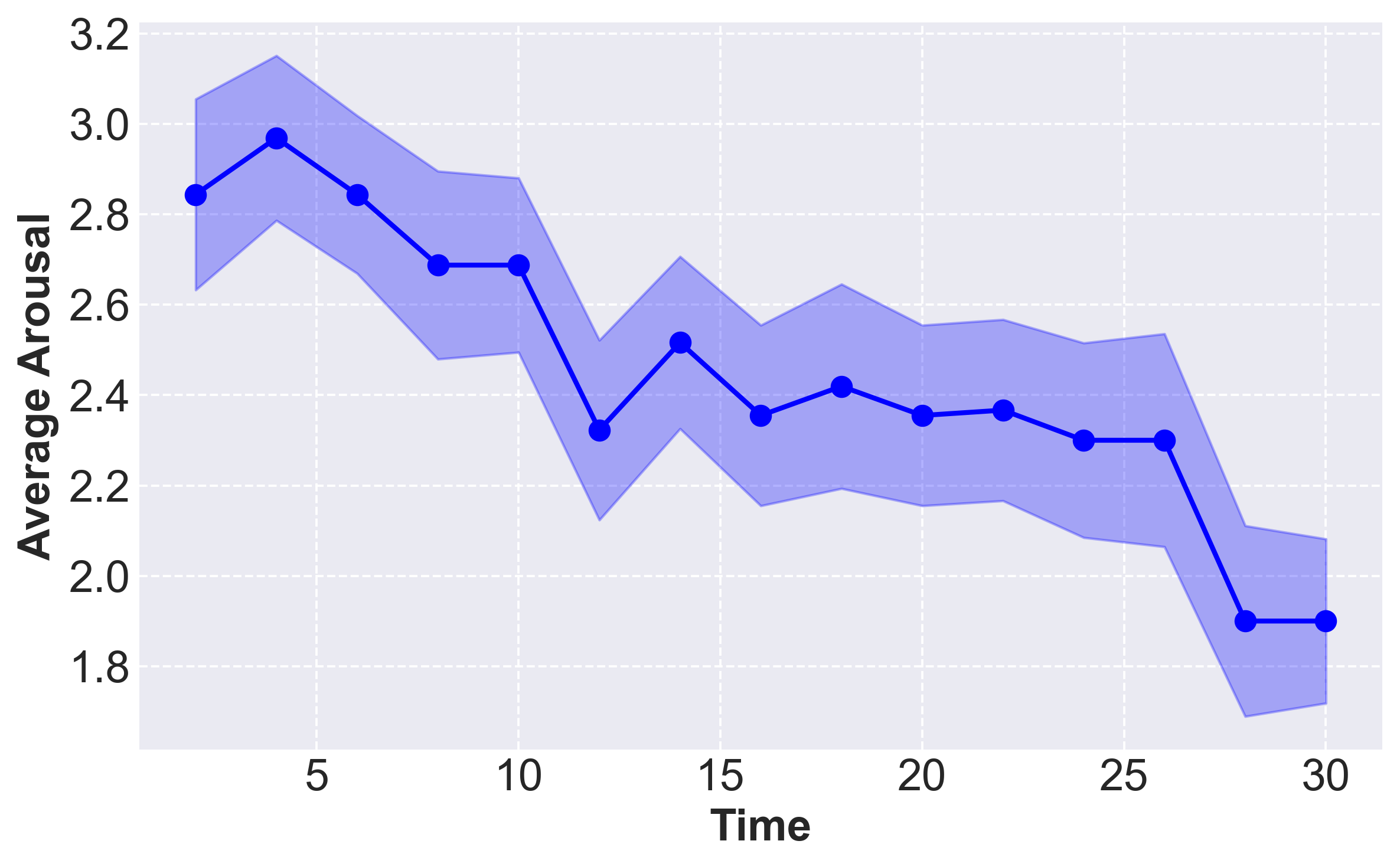
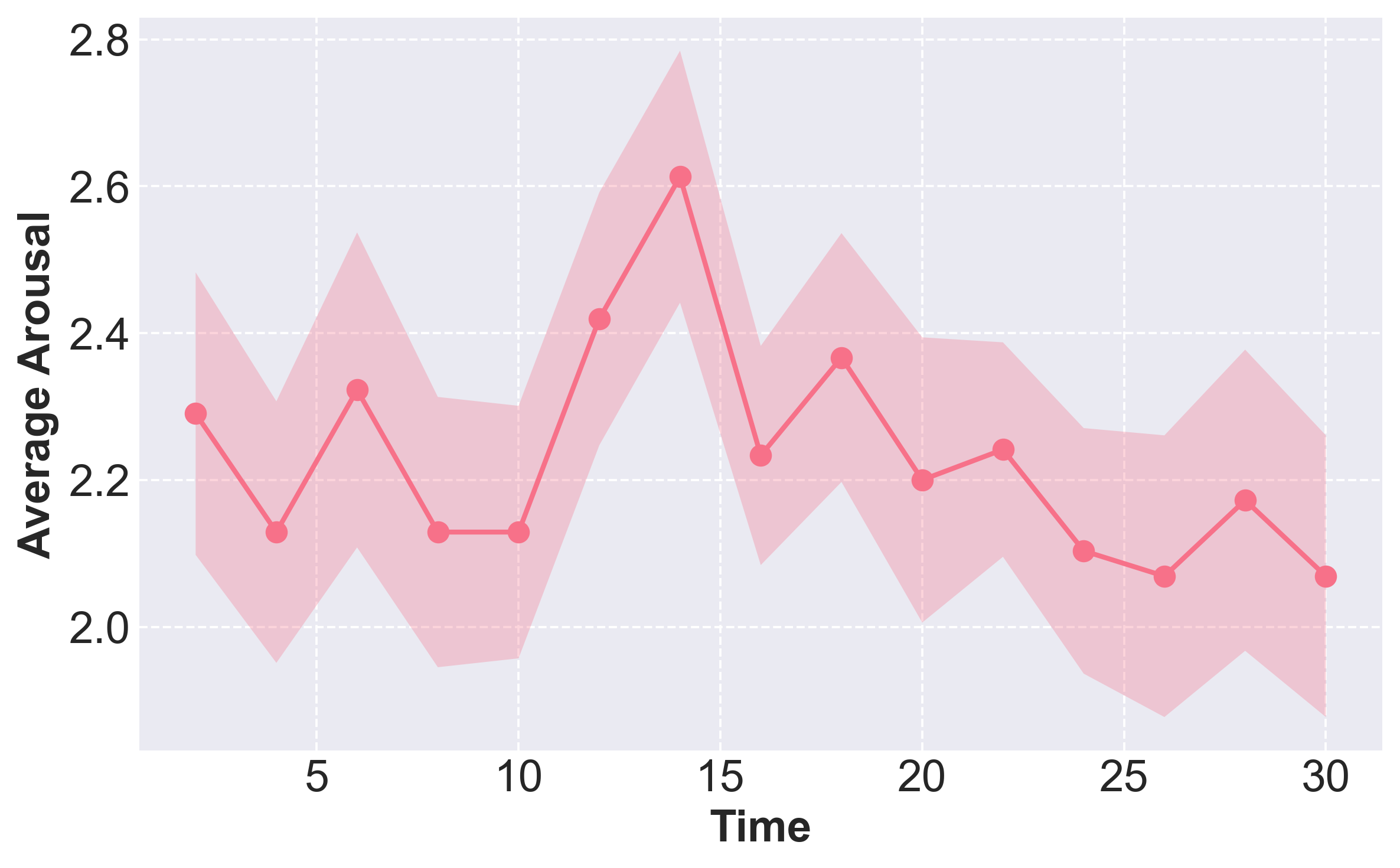
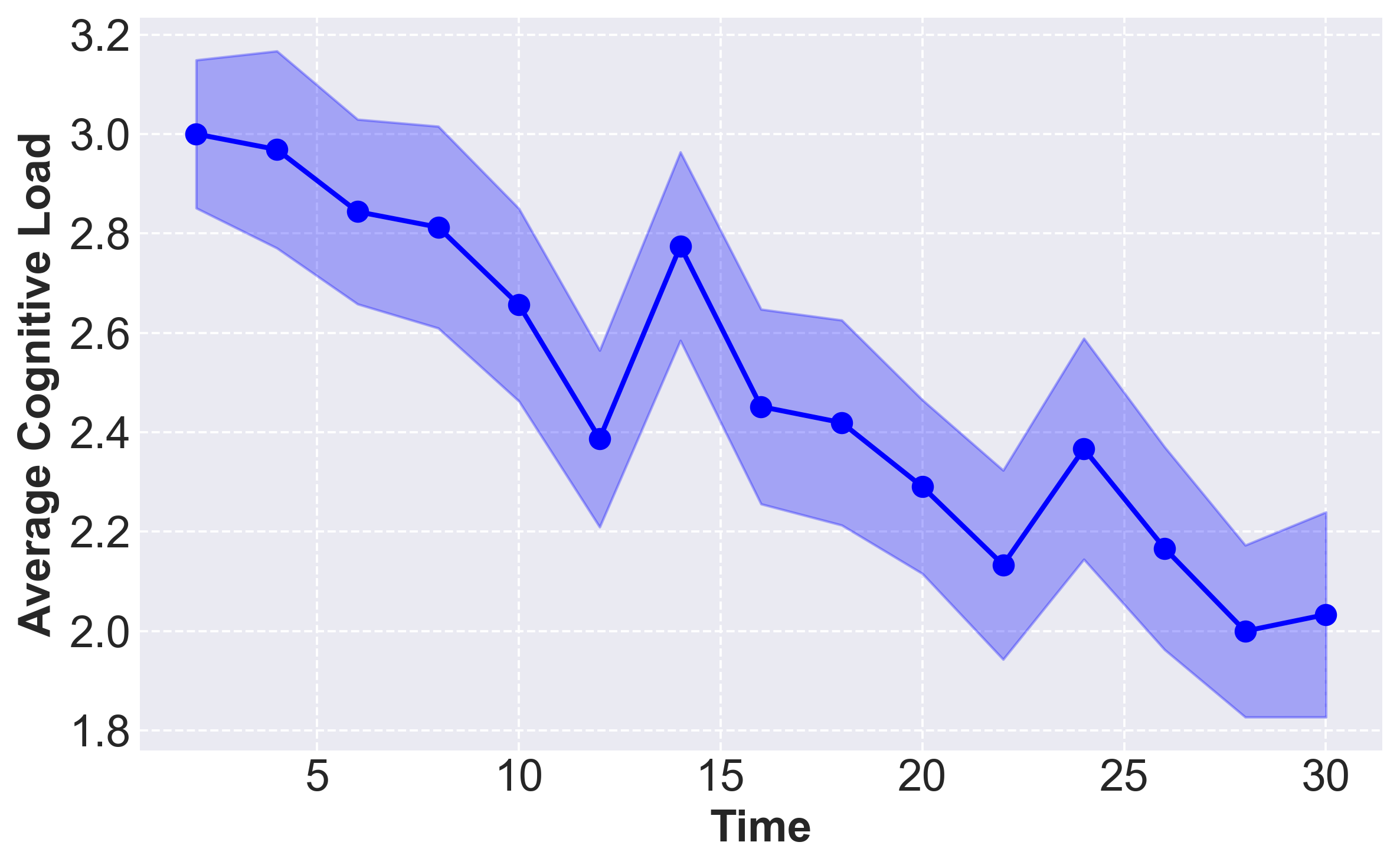
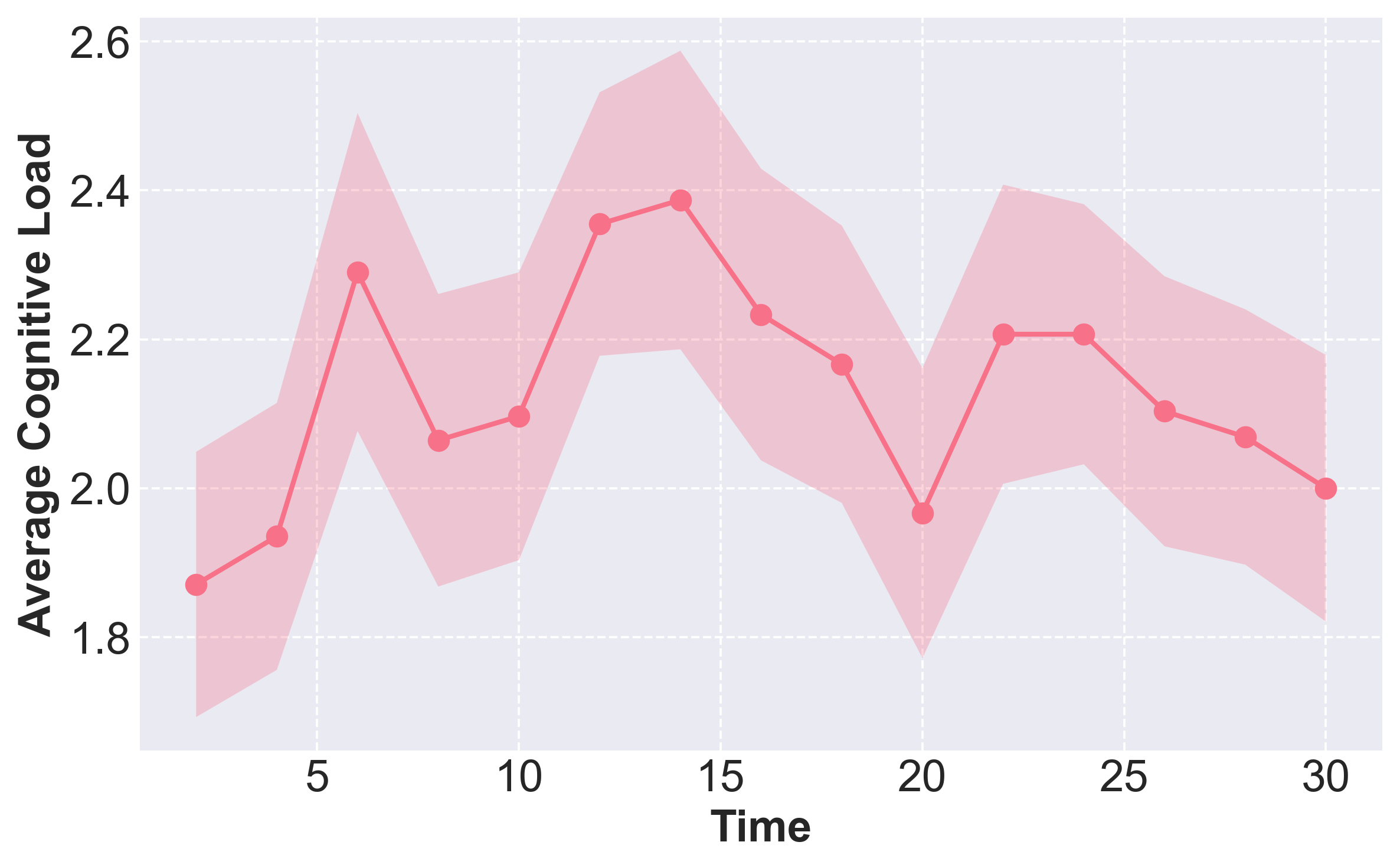
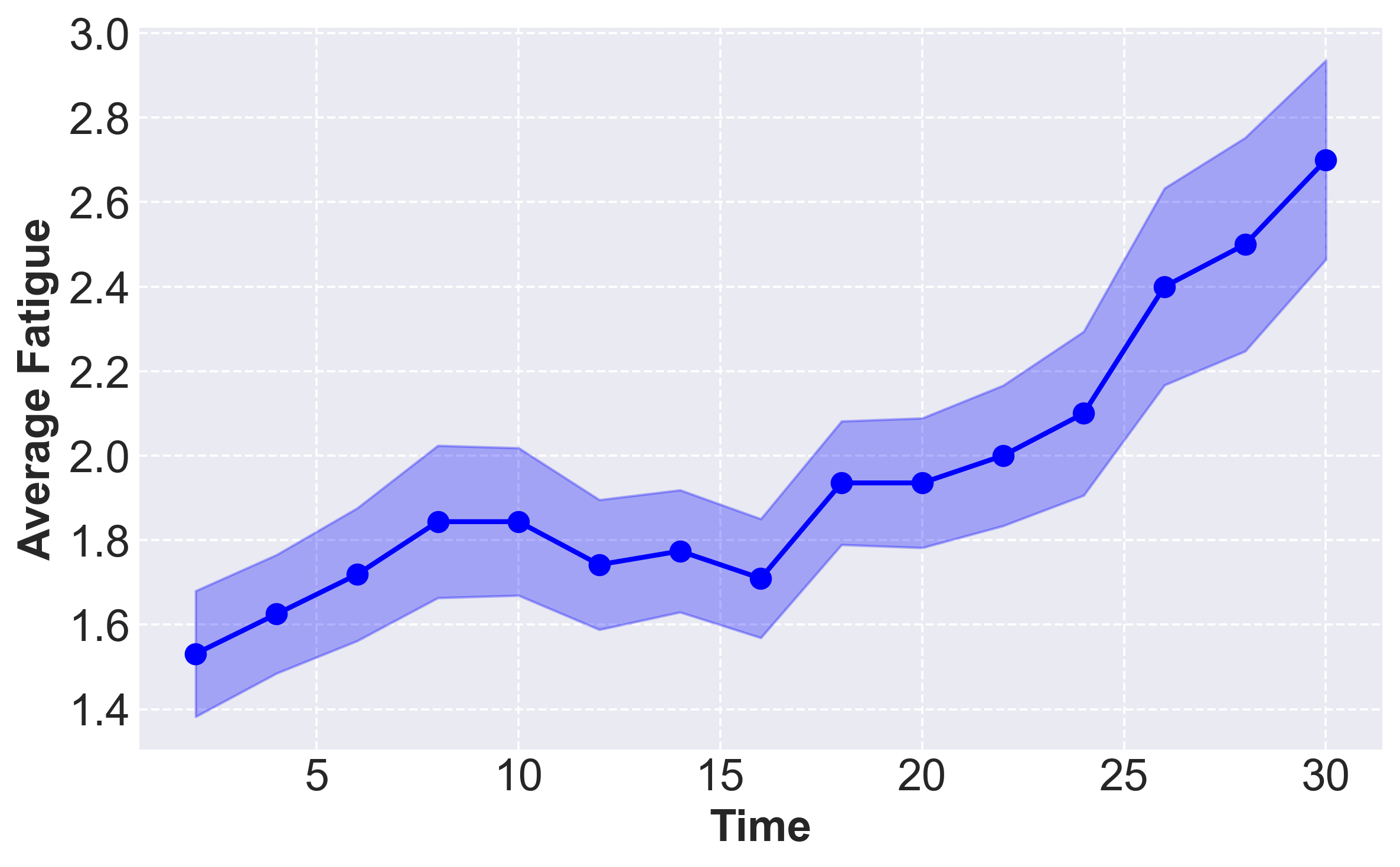
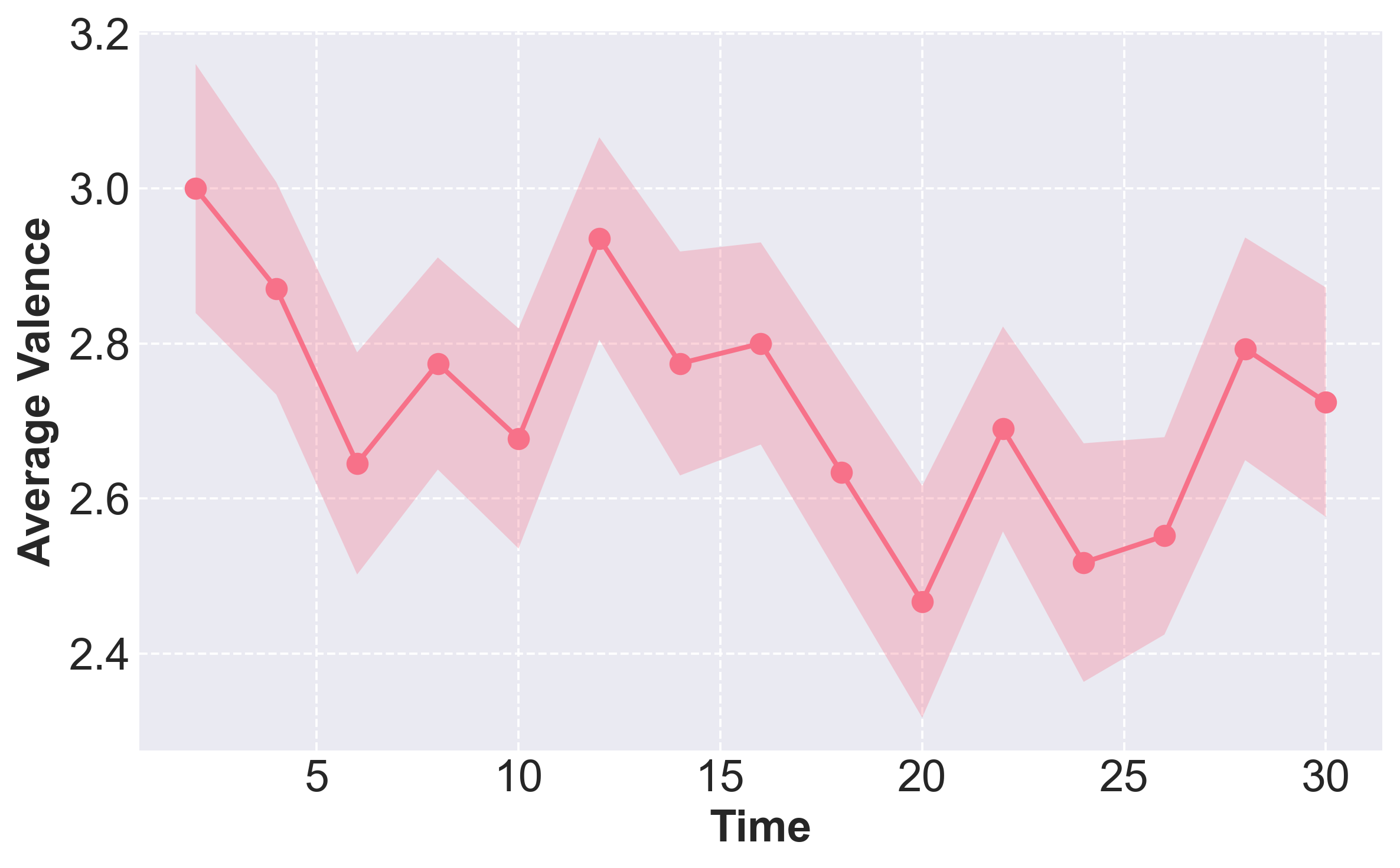
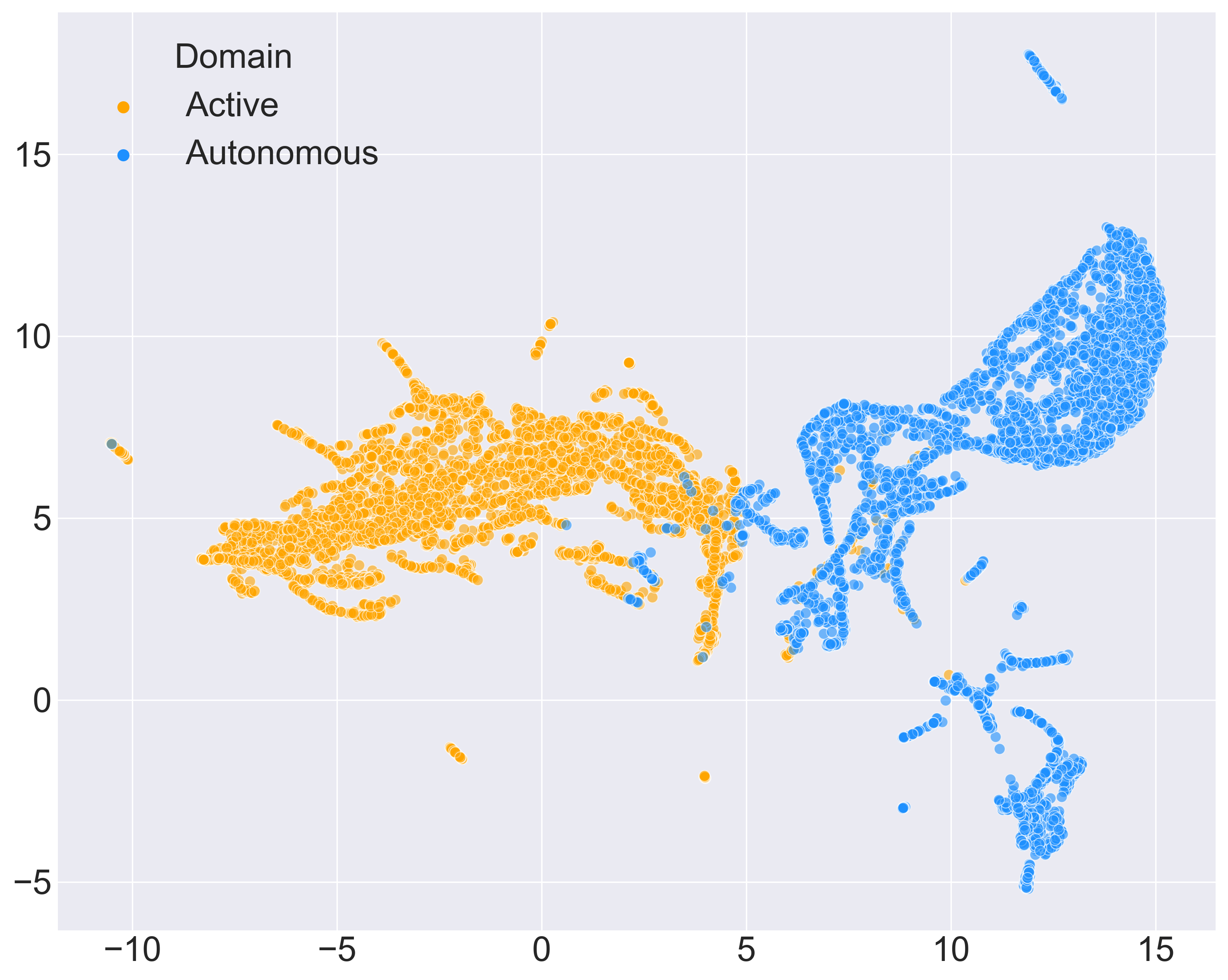
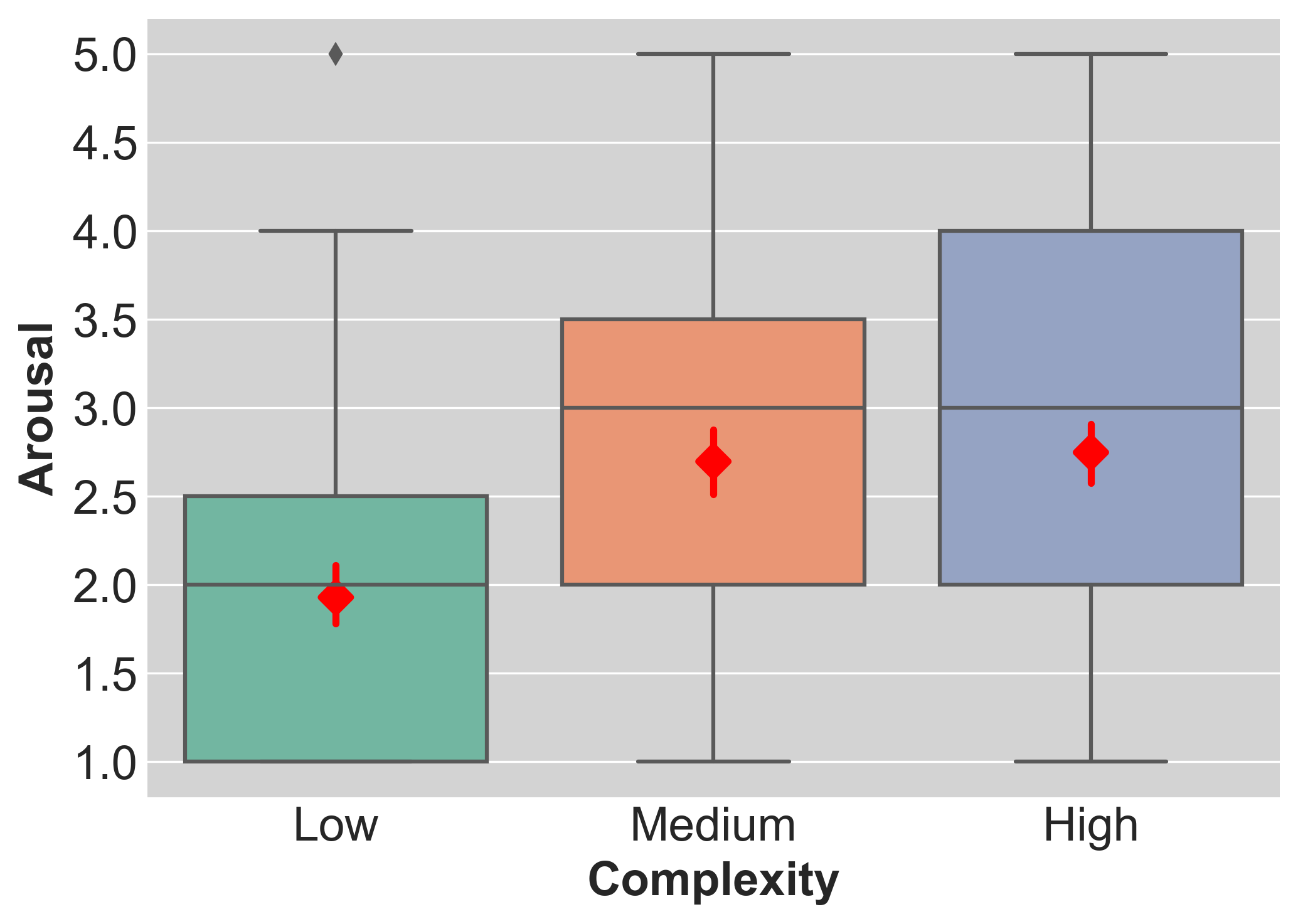
시간적 분석 결과, 능동 주행에서는 운전 조작(핸들, 페달)과 시각‑청각 피드백에 대한 즉각적인 뇌 반응이 관찰되어 전두 전극에서 β파가 급격히 상승하였다. 반면 자율 주행에서는 이러한 운동 관련 활성화가 감소하고, 대신 지속적인 저주파(θ) 활동이 전두·중심부에서 나타나, 운전자가 ‘대기’ 상태에 머무르는 것을 시사한다. 과제 복잡도가 증가할수록 두 조건 모두 전반적인 뇌 활성도가 상승했지만, 능동 주행에서는 상승 폭이 두 배에 육박했으며, 이는 분포 이동(distribution shift)의 핵심 증거이다.
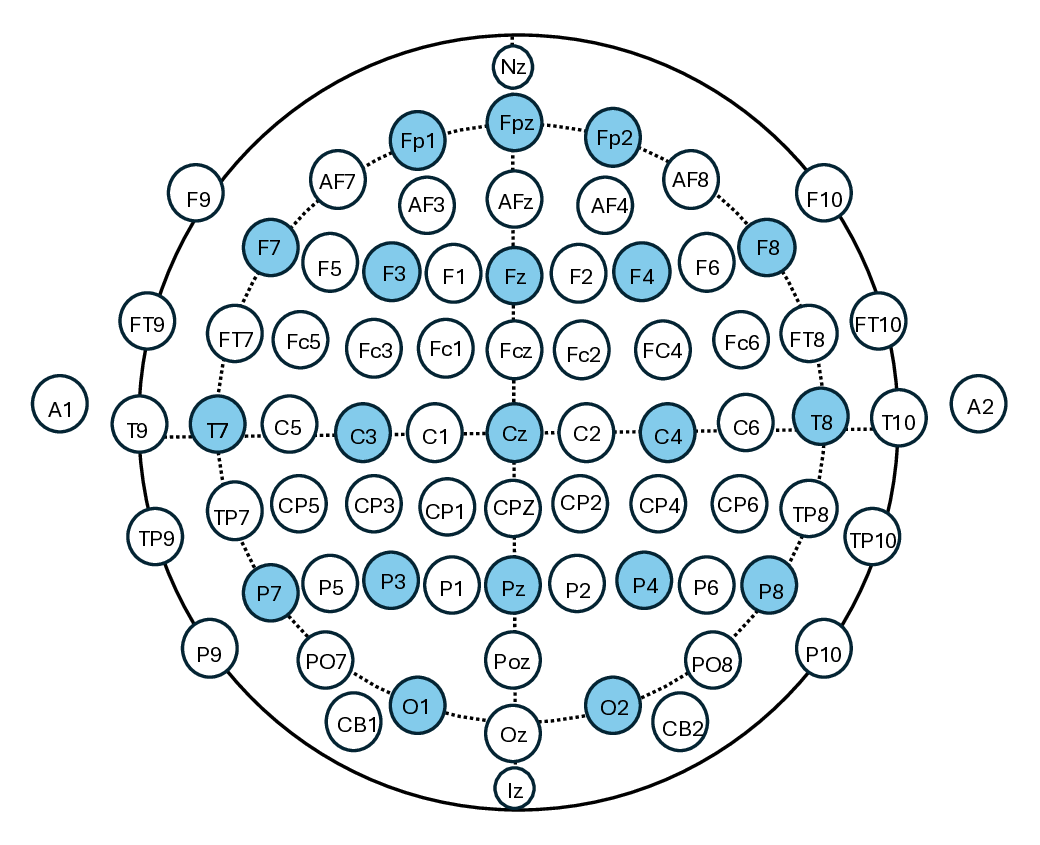
채널별 차이 분석에서는 특히 Fz, Cz, Pz 부근에서 유의미한 차이가 발견되었으며, 이는 운동 계획·실행과 관련된 전두·두정 영역의 차별적 참여를 반영한다. 이러한 공간적 차이는 머신러닝 모델의 전이 학습 성능 저하와 직결된다. 논문은 능동 주행 데이터로 학습한 딥러닝 기반 정신 상태 분류기가 자율 주행 데이터에 적용될 때 정확도가 30% 이하로 급락함을 보고했으며, 반대 경우도 마찬가지였다. 이는 데이터 분포가 근본적으로 다르기 때문에, 동일 모델을 그대로 적용할 수 없음을 의미한다.
연구 결과는 실용적인 시사점을 가진다. 자율 차량용 운전자 모니터링 시스템은 단순히 ‘피로 감지’만을 목표로 하는 것이 아니라, 운전자가 언제 개입 준비가 되었는지, 감정적 변동이 언제 발생하는지를 실시간으로 파악해야 한다. 이를 위해서는 자율 주행 전용 EEG 데이터베이스 구축과, 각 운전 모드에 특화된 모델 설계가 필수적이다. 또한, 모터 참여가 감소한 상황에서도 저주파 기반의 ‘대기 상태’ 감지를 위한 새로운 특징 추출 기법이 필요하다. 향후 연구에서는 멀티모달(심박수, 안구 움직임) 데이터를 결합해 보다 견고한 상태 추정 모델을 개발하고, 실제 도로 환경에서의 검증을 진행하는 것이 바람직하다.
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리