모듈형 트랜스듀서 기반 세계 모델 분해 프레임워크
📝 원문 정보
- Title: From monoliths to modules: Decomposing transducers for efficient world modelling
- ArXiv ID: 2512.02193
- 발행일: 2025-12-01
- 저자: Alexander Boyd, Franz Nowak, David Hyland, Manuel Baltieri, Fernando E. Rosas
📝 초록 (Abstract)
최근 세계 모델이 AI 에이전트를 실제 환경에 배치하기 전에 훈련·평가할 수 있는 샌드박스 환경으로 제안되고 있다. 현실적인 세계 모델은 높은 계산 비용을 요구하지만, 실제 상황이 보통 모듈식으로 상호작용하는 하위 구성요소들로 이루어진다는 사실을 활용하면 효율적인 모델링이 가능하다. 본 논문에서는 POMDP를 일반화한 모델 클래스인 트랜스듀서를 대상으로, 복잡한 세계 모델을 분해하는 프레임워크를 개발한다. 트랜스듀서의 합성은 기존에 잘 알려져 있으나, 본 연구는 입력‑출력 서브스페이스가 서로 다른 하위 트랜스듀서를 역으로 도출하는 방법을 명확히 제시한다. 이를 통해 단일 거대 모델 대신 병렬화·해석이 가능한 하위 모델을 구축할 수 있어, 분산 추론을 지원한다. 전반적으로 본 결과는 AI 안전성에서 요구되는 구조적 투명성과 실제 추론에 필요한 계산 효율성을 연결하는 토대를 제공한다.💡 논문 핵심 해설 (Deep Analysis)
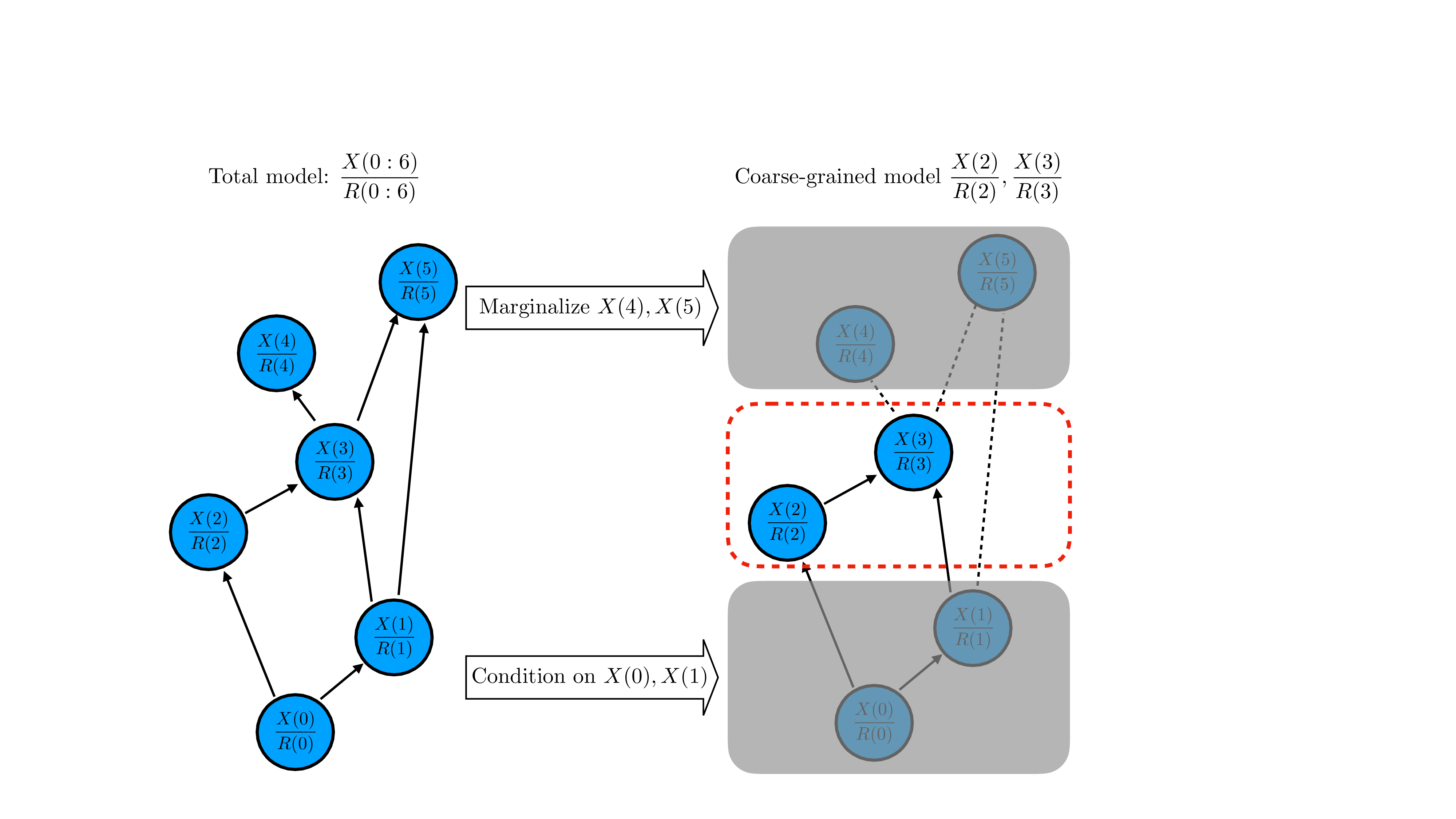
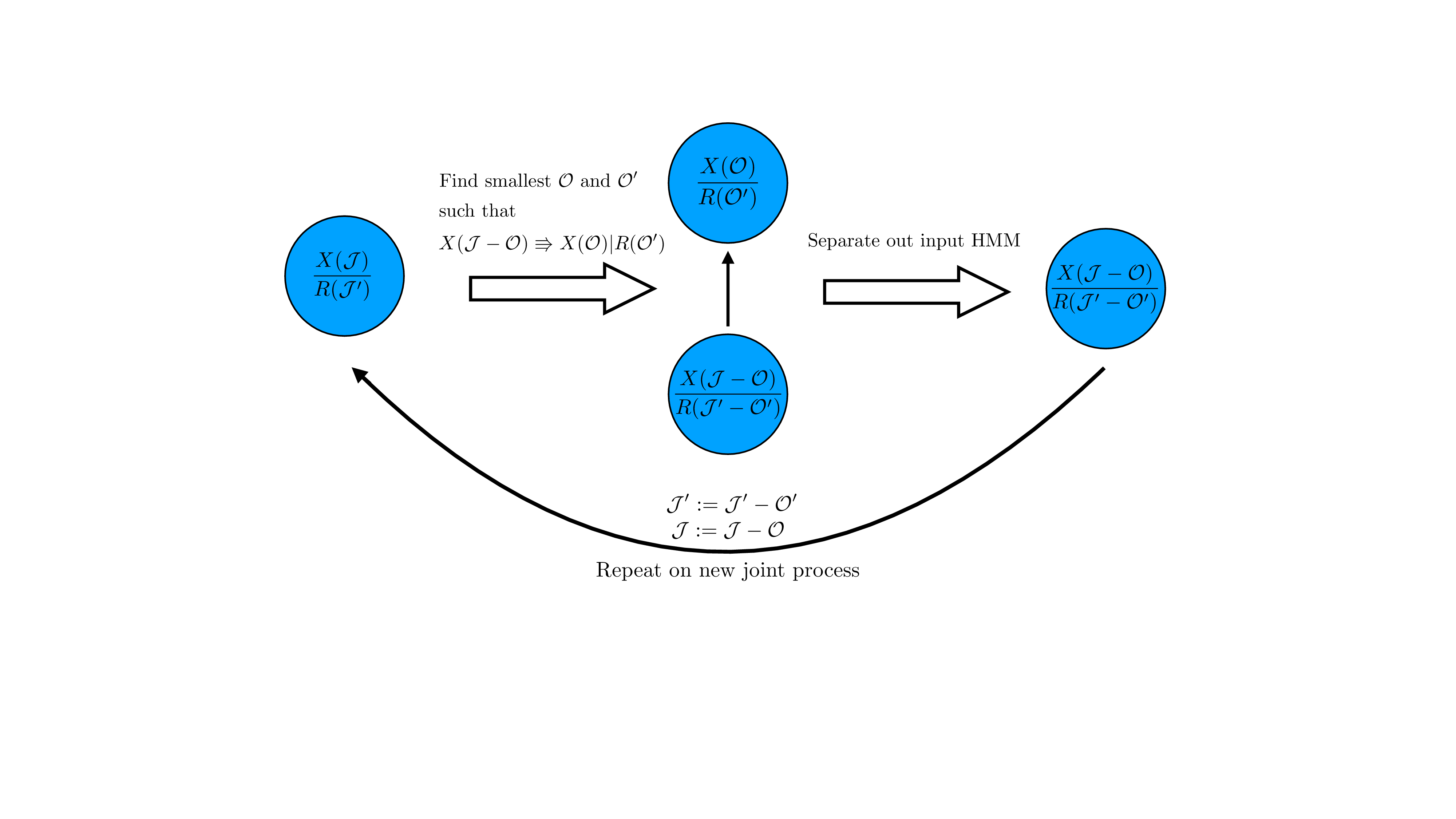
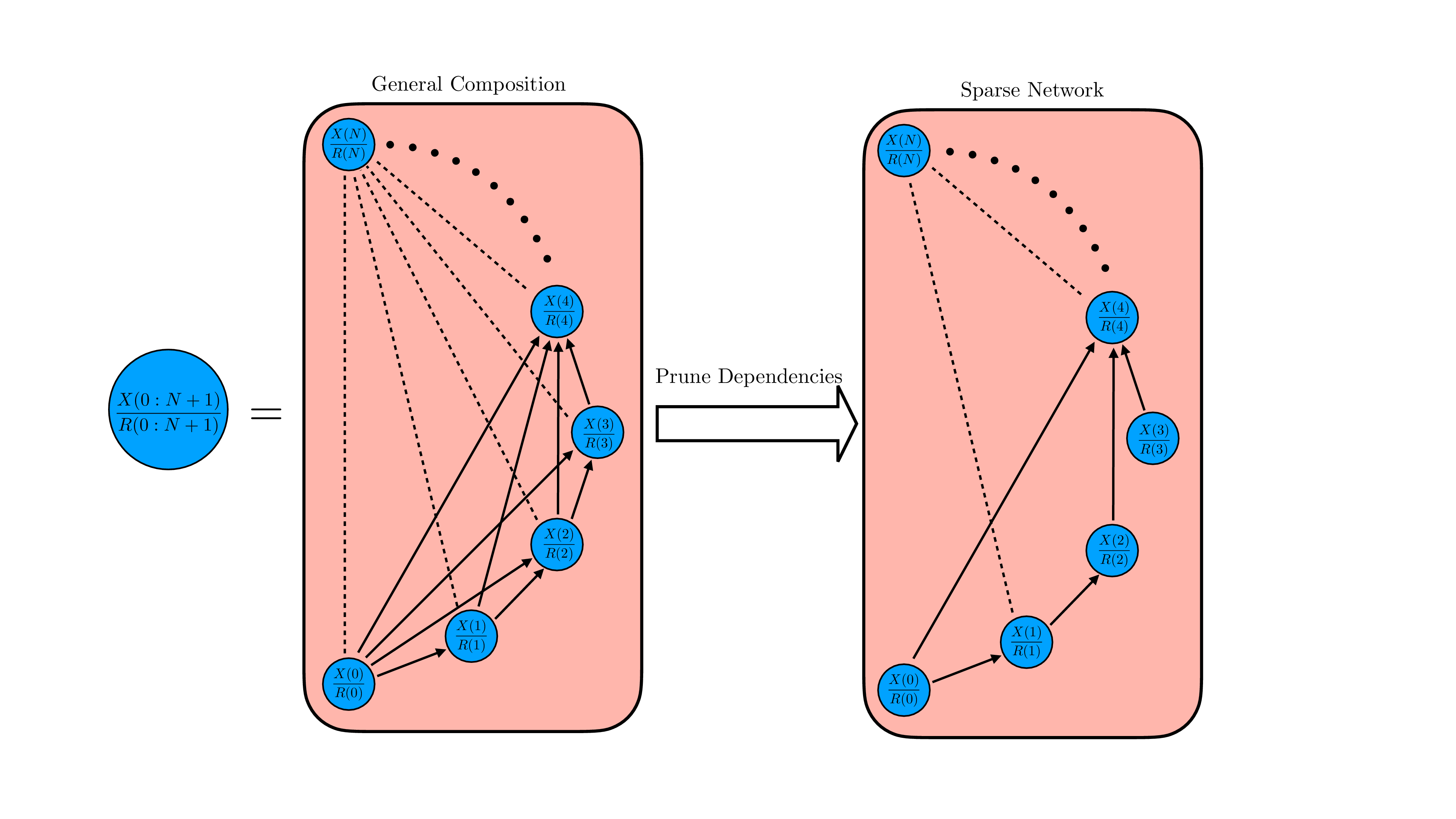
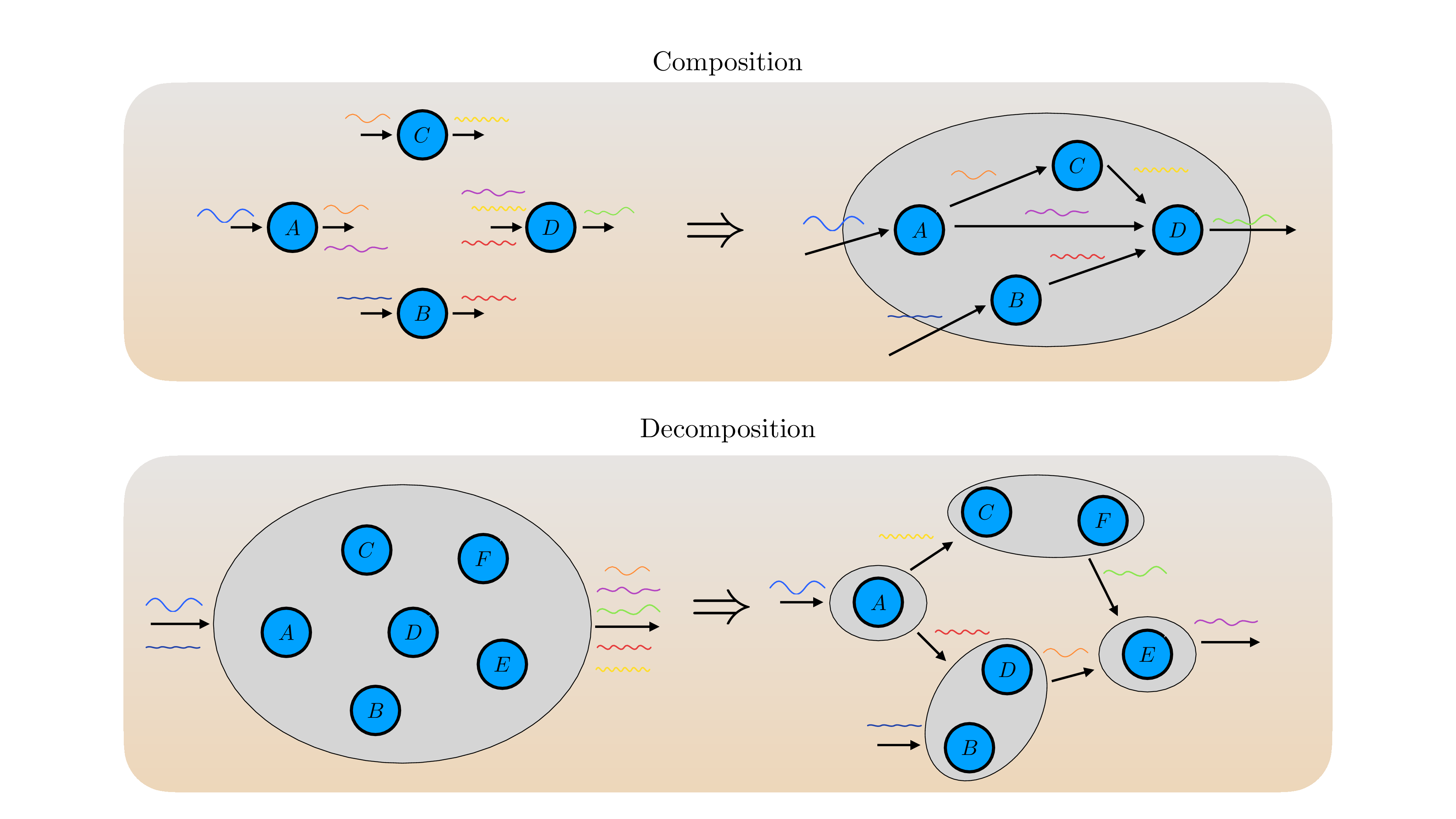
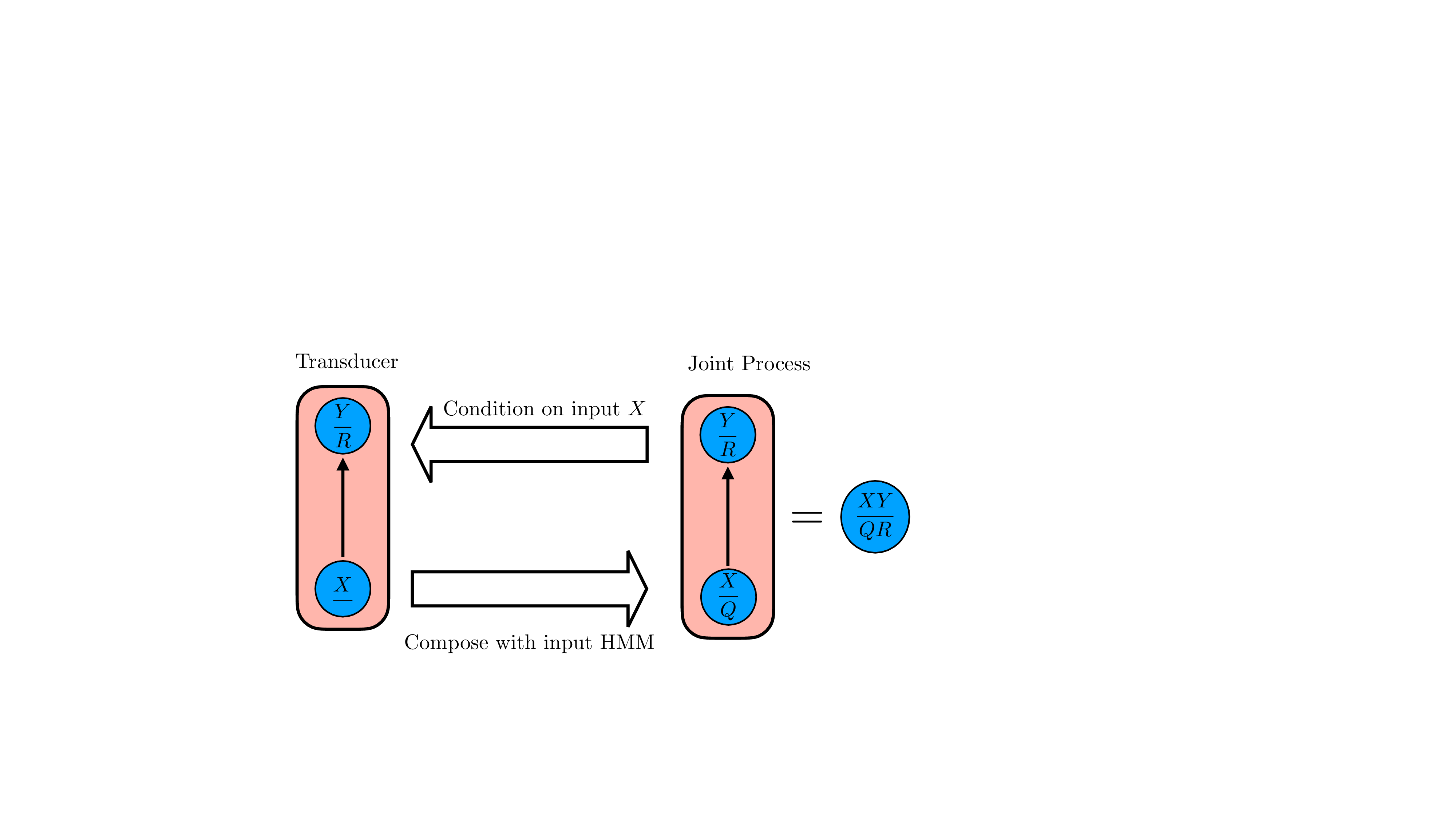
본 연구는 이러한 한계를 극복하기 위해 ‘역합성(inversion)’이라는 새로운 절차를 도입한다. 구체적으로, 전체 트랜스듀서의 입력·출력 공간을 다차원 서브스페이스로 분할하고, 각 서브스페이스에 대응하는 하위 트랜스듀서를 독립적으로 추출한다. 이 과정은 수학적으로는 선형대수와 범주론적 관점에서의 펑터(Functor) 분해와 유사하며, 각 하위 트랜스듀서는 자신이 담당하는 서브시스템(예: 물리 엔진, 인간 행동 모델, 환경 센서 등)만을 집중적으로 학습한다. 결과적으로 다음과 같은 장점이 도출된다.
- 계산 효율성: 하위 트랜스듀서는 서로 다른 GPU·CPU 노드에 배치해 병렬 학습·추론이 가능하므로, 전체 모델 대비 연산량이 선형적으로 감소한다.
- 해석 가능성: 각 모듈이 담당하는 기능이 명시적으로 정의되므로, 오류 원인 분석이나 정책 수정이 용이해진다. 이는 AI 안전성 연구에서 ‘투명성(transparency)’과 ‘검증 가능성(verifiability)’을 확보하는 데 핵심적인 요소이다.
- 분산 추론: 실시간 로봇 제어나 자율 주행 등 시간 민감도가 높은 응용 분야에서, 일부 모듈만 최신 센서 데이터로 업데이트하고 나머지는 캐시된 결과를 재활용함으로써 지연을 최소화할 수 있다.
- 재사용성: 동일한 하위 트랜스듀서를 여러 복합 환경에 재활용함으로써, 새로운 시뮬레이션을 구축할 때 초기 모델링 비용을 크게 절감한다.
또한, 논문은 ‘모듈형 세계 모델’이 AI 안전성 프레임워크와 어떻게 연계될 수 있는지를 제시한다. 예를 들어, 위험도가 높은 서브시스템(예: 인간-로봇 상호작용)만 별도의 검증 절차를 거치고, 나머지는 일반적인 학습 파이프라인을 적용함으로써 안전 검증 비용을 최적화한다. 이러한 접근은 현재 AI 윤리·안전 분야에서 강조되는 ‘위험 기반 평가(risk‑based assessment)’와도 일맥상통한다.
요약하면, 이 연구는 복잡한 세계 모델을 수학적으로 엄밀하게 분해하고, 이를 실용적인 시스템 설계에 적용함으로써, 고성능·고투명도 AI 시스템 구축을 위한 새로운 패러다임을 제시한다. 앞으로의 연구 과제로는 하위 트랜스듀서 간 인터페이스 표준화, 동적 환경 변화에 대한 적응 메커니즘, 그리고 실제 로봇 플랫폼에의 적용 사례 검증이 있다.
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리