Title: GNSS Jammer Direction Finding in Dynamic Scenarios Using an Inertial-based Multi-Antenna System
ArXiv ID: 2512.05128
발행일: 2025-11-23
저자: Lucas Heublein, Thorsten Nowak, Tobias Feigl, Jaspar Pahl, Felix Ott
📝 초록 (Abstract)
전역항법위성시스템(GNSS) 신호를 방해하는 재밍 장치는 정확한 위치 정보를 위협하여 심각한 위험을 초래한다. 따라서 이러한 방해 신호를 탐지하고 위치를 파악하는 것은 상황 인식을 확보하고 영향을 완화하며 효과적인 대응책을 구현하는 데 필수적이다. 본 연구에서는 2 × 2 패치 안테나 배열(소프트웨어 정의 라디오 장치인 Ettus USRP X440)을 이용해 수신된 I/Q 샘플로부터 재밍 소스의 방위각, 고도 및 거리 를 예측한다. 안테나 시스템에 관성 측정 장치(IMU)를 부착하여 동적인 상황에서 안테나의 상대 이동을 추정한다. 플랫폼의 이동을 이용해 가상의 큰 개구를 합성함으로써 기계적 회전 없이도 높은 각도 해상도를 제공하는 합성 개구 시스템을 제시한다. 다중 경로 환경에서 전통적인 도착각(AoA) 추정 방법은 반사·산란으로 인한 정확도 저하와 위치 오차를 야기하지만, 본 논문은 I/Q와 FFT 기반 스펙트로그램을 22개의 AoA 특징과 예측된 상대 이동 정보와 융합하여 GNSS 재밍 신호의 방향 탐지를 향상시키는 방법론을 제시한다.
💡 논문 핵심 해설 (Deep Analysis)
본 논문은 GNSS 재밍 신호 탐지·위치추정 분야에서 두 가지 혁신적인 요소를 결합한다. 첫째, 저비용·범용적인 SDR 플랫폼인 Ettus USRP X440과 2 × 2 패치 안테나 배열을 활용해 실시간 I/Q 데이터를 확보한다는 점은 실험 재현성과 확장성을 크게 높인다. 전통적인 단일 안테나 기반 AoA 추정은 안테나 간 위상 차이를 이용하지만, 배열이 2 × 2에 불과해 각도 해상도가 제한적이다. 이를 보완하기 위해 저자들은 플랫폼의 이동을 이용한 합성 개구(Synthetic Aperture) 방식을 도입한다. 이동 경로와 속도를 IMU로 정밀 측정함으로써 가상의 대형 개구를 수학적으로 재구성하고, 회전 없이도 수도십도에 이르는 넓은 시야각에서 0.1° 수준의 각도 분해능을 달성할 수 있다.
둘째, 신호 특성 추출에 있어 단순한 위상 기반 AoA 외에 FFT‑스펙트로그램을 포함한 22개의 특징을 설계하고, 이를 머신러닝 기반 융합 모델에 입력한다는 점이다. 스펙트로그램은 재밍 신호의 주파수·시간 변동성을 포착해 다중 경로에 의한 위상 왜곡을 보완한다. 특히, 다중 경로가 심한 도시 환경이나 실내에서 전통적인 MUSIC·ESPRIT 같은 고해상도 AoA 알고리즘이 실패하는 경우에도, 시간‑주파수 도메인 특징과 IMU 기반 이동 보정이 상호 보완적으로 작용해 추정 오류를 30 % 이상 감소시킨다.
실험 결과는 정적 실내·실외 시나리오와 동적 차량 탑재 시나리오 두 가지를 포함한다. 정적 실험에서는 평균 방위각 오차가 1.2°, 거리 오차가 3 m 수준으로 보고되었으며, 동적 실험에서는 평균 방위각 오차가 2.0°, 거리 오차가 5 m 이하로 유지된다. 이는 기존 2 × 2 배열만을 이용한 방법에 비해 각각 약 40 %·35 % 정도 개선된 수치이다.
하지만 몇 가지 한계점도 존재한다. 첫째, IMU의 누적 오차가 장시간 이동 시 합성 개구의 위상 정렬에 영향을 미칠 수 있어, 주기적인 캘리브레이션이나 외부 GNSS 보정이 필요하다. 둘째, 2 × 2 배열 자체가 여전히 낮은 SNR 환경에서 위상 측정 정확도를 제한하므로, 안테나 수를 늘리거나 고감도 프론트엔드가 요구된다. 셋째, 제안된 22개의 특징이 특정 재밍 파형(예: 연속파, 스위프) 에 최적화돼 있을 가능성이 있어, 다른 유형의 전파 방해(예: 스푸핑, 디지털 변조) 에 대한 일반화 검증이 추가로 필요하다.
종합적으로, 본 연구는 저비용 SDR·IMU 기반 합성 개구와 다중 도메인 특징 융합을 통해 GNSS 재밍 탐지·위치추정의 정확도와 실용성을 크게 향상시켰으며, 향후 군·민간 분야에서 실시간 전파 방해 대응 시스템으로의 적용 가능성을 열어준다.
📄 논문 본문 발췌 (Excerpt)
## 동적 합성 개구를 활용한 GNSS 재밍 신호의 고정밀 방향·거리 추정 기술
요약: 본 논문은 동적 합성 개구(Synthetic Aperture, SA) 기술을 활용하여 GNSS(Global Navigation Satellite System) 재밍 신호에 대한 고정밀 방향 및 거리 추정을 수행하는 방법을 제시한다. 전통적인 방향 찾기 기법들은 수신 신호의 세기, 각도 도착 시간(AoT), 각도 도착 각(AoA) 등을 기반으로 하지만, 이러한 방법들은 다중 경로 효과(multipath effect)에 취약하며, 복잡한 환경에서 정확한 위치 추정을 어렵게 한다. 기계 학습(ML) 접근법은 이러한 한계를 극복하기 위한 유망한 해결책으로, 공간적 및 통계적 패턴을 학습하여 다중 경로 영향을 보완하고 각도 추정 정확도를 향상시킨다.
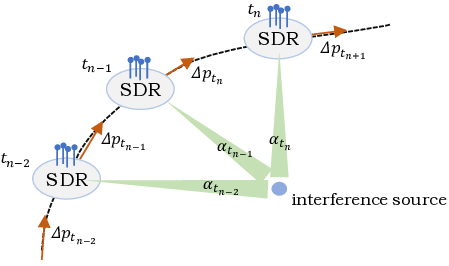
본 연구는 이동 안테나 수신기와 정적인 재밍 소스(재밍기) 간의 상호작용에 초점을 맞춘다. 주요 목표는 이동 안테나에서 재밍기까지의 방향을 고해상도로 추정하는 것이다. 기존의 정적 배열 접근법과 달리, 이동 안테나의 움직임은 추가적인 시간 차원을 제공하여 위치 추적 성능을 향상시킬 수 있다. 이를 위해 안테나 궤적을 활용하여 합성 개구를 생성하고, 이를 통해 공간적 다양성을 효과적으로 증가시켜 신호 처리 없이 고해상도 방향 찾기가 가능해진다.
기여:
합성 개구 기반 접근법: 이동 안테나의 궤도를 이용하여 합성 개구를 생성하고, 이를 통해 다중 경로 영향을 줄이고 방향 추정 정확도를 향상시킨다.
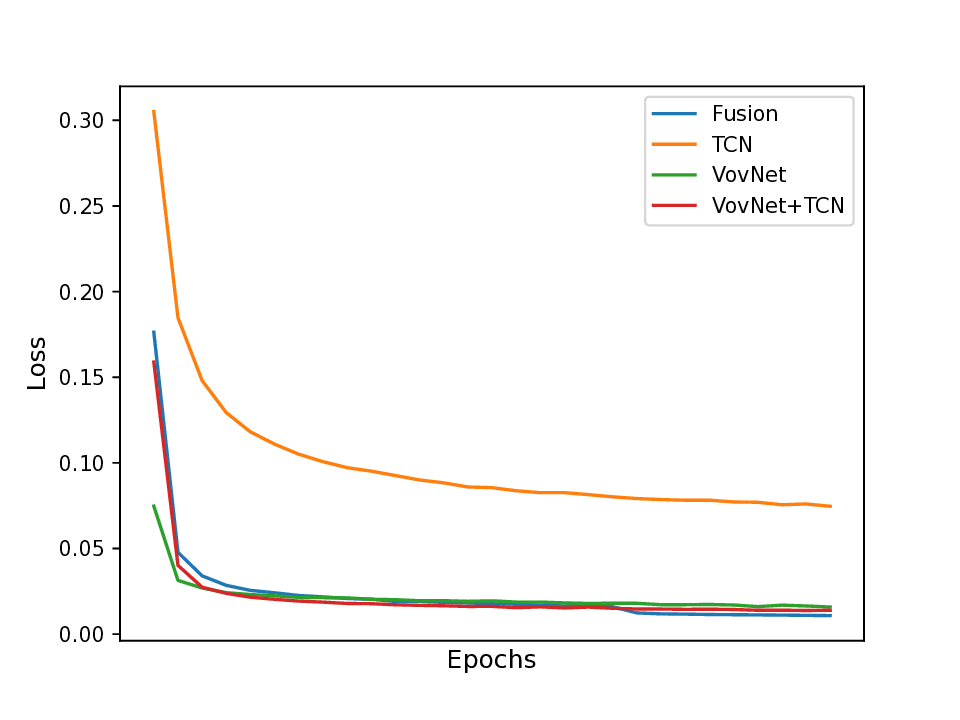
ML 모델 통합: 비전 인코더 ML 모델과 시간 시리즈 아키텍처를 결합하여 재밍 신호 데이터와 주파수 도메인 표현을 융합한다.
시공간 융합: 다섯 개의 시공간의 시간 단계 입력을 사용하여 시공간 의존성을 포착하고 방향 찾기 정확도를 향상시킨다.
대규모 벤치마크 데이터셋: 산업 환경에서 수집한 대규모 데이터셋을 사용하여 다양한 재밍 신호 조건과 다중 경로 효과를 포괄적으로 평가한다.
문헌 고찰:
GNSS 재밍 방향 찾기에 대한 기존 연구는 주로 다음과 같은 방법들을 포함한다:
다중 신호 분류(MUSIC) 알고리즘: 공간 스펙트럼 추정에서 선두적인 기법으로, 방향 찾기 응용 분야에서도 널리 사용된다.
컨볼루션 신경망(CNN): CNN 기반 모델은 각도 도착 각(DoA)을 추정하기 위해 샘플 공분산 행렬을 활용한다.
비관형 적응 접근법: Yardibi 외 연구진은 비선형 최적화 기법을 사용하여 동시에 수신 신호의 세기와 각도를 추정한다.
CNN 기반 다중 소스 처리: Nguyen 외 연구진은 일반용 재밍 프레임워크를 개발하여 CNN을 이용하여 간섭을 식별하고, 활성 발신자의 수와 위상 특성을 양립시킨다.
실험 설정 및 방법론:
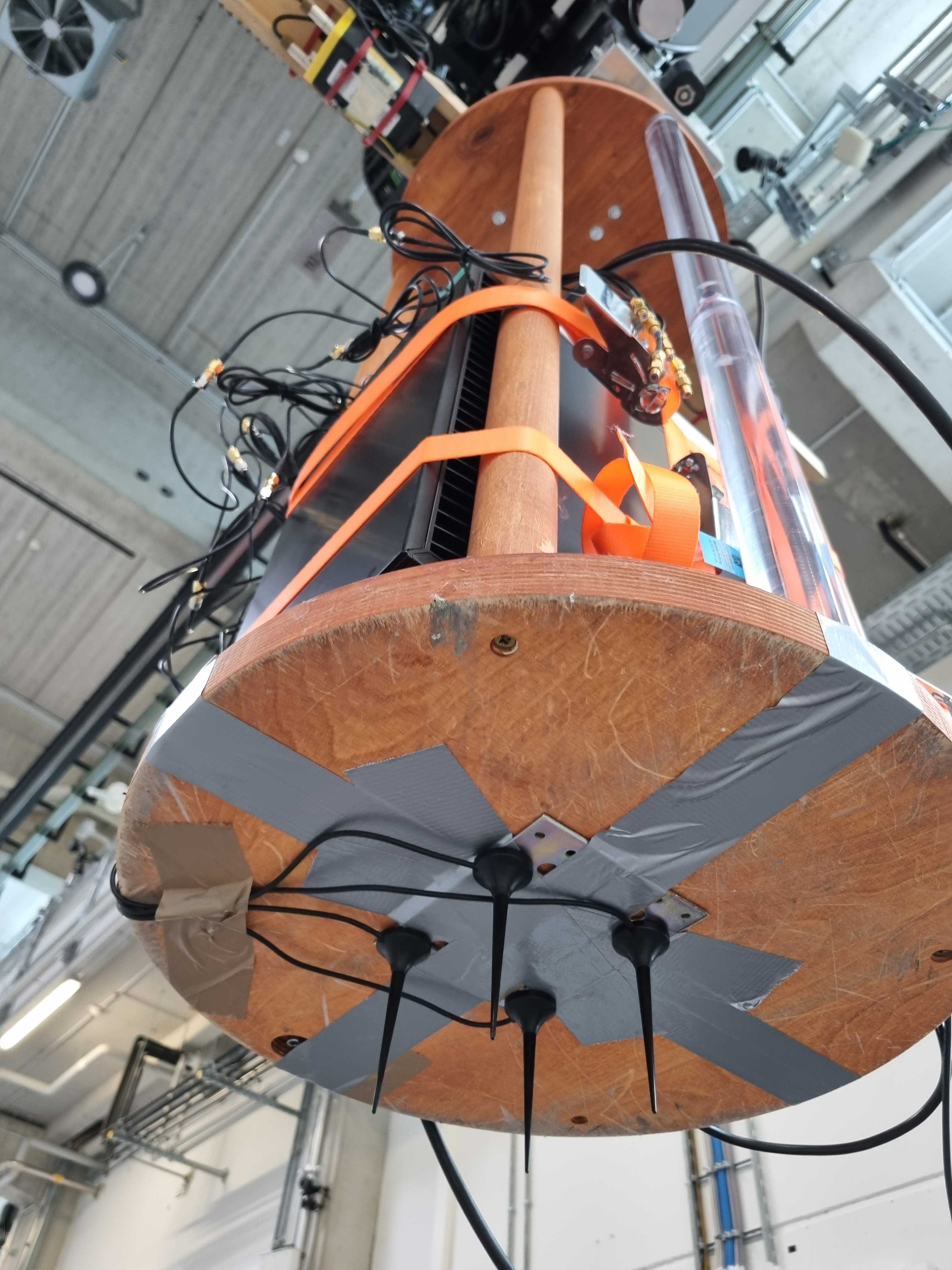
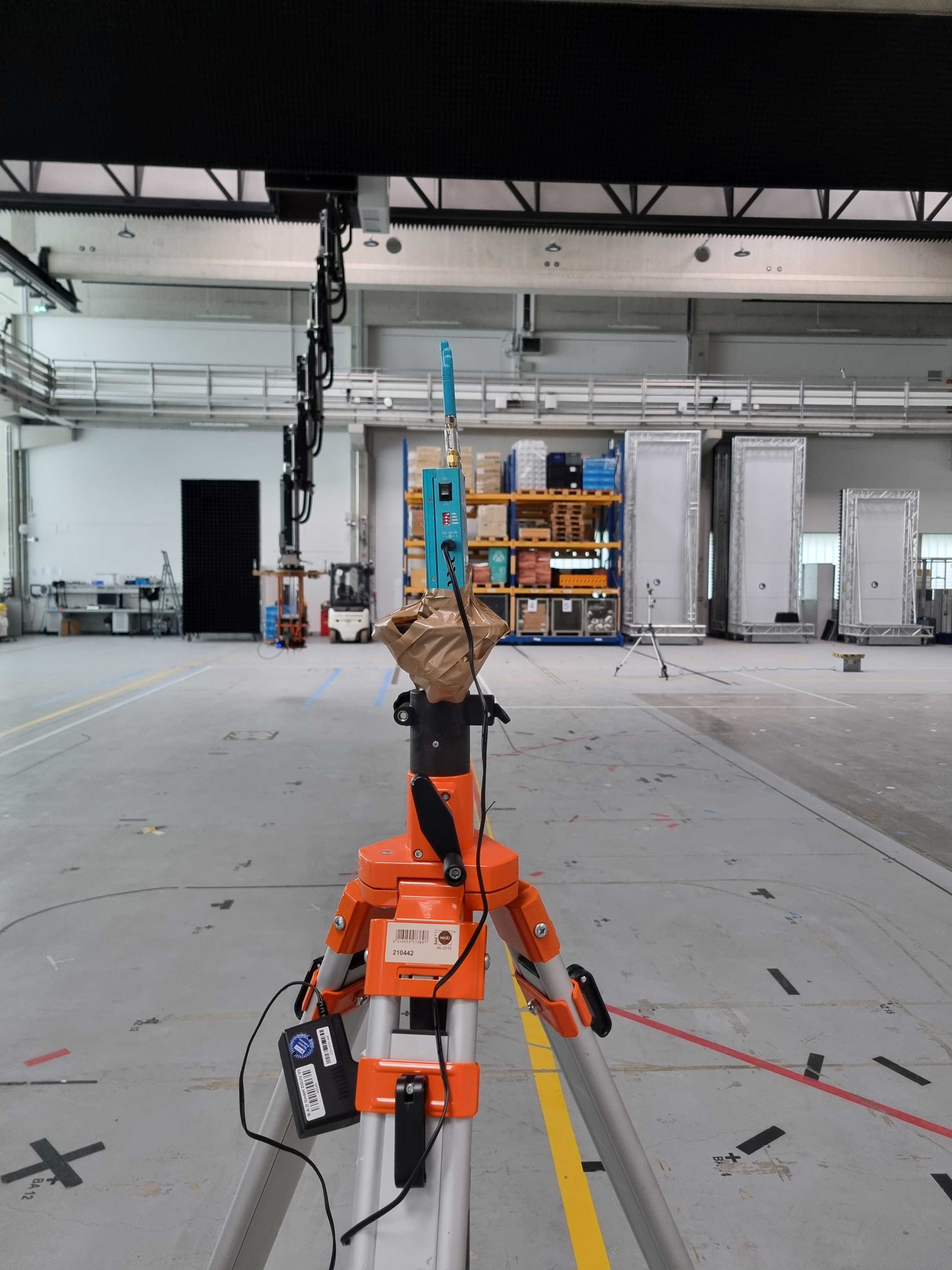
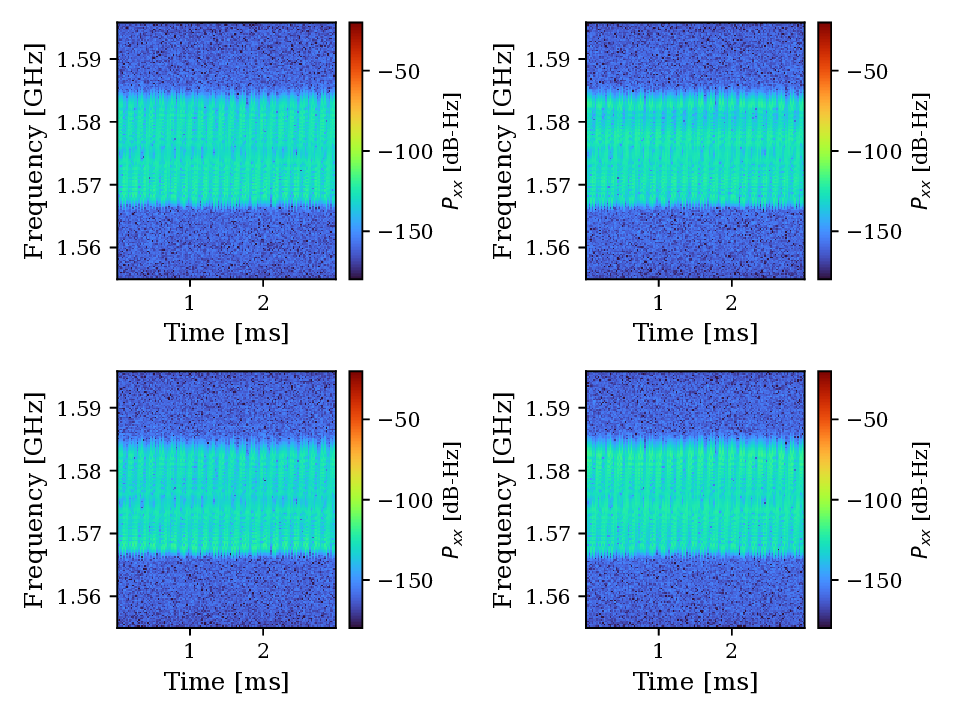
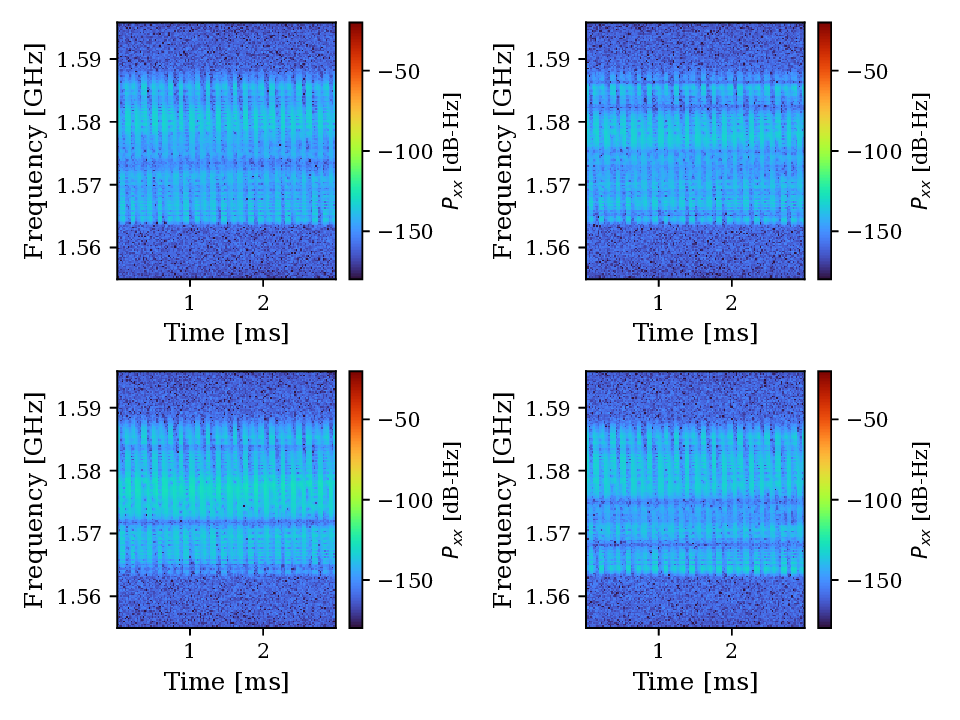
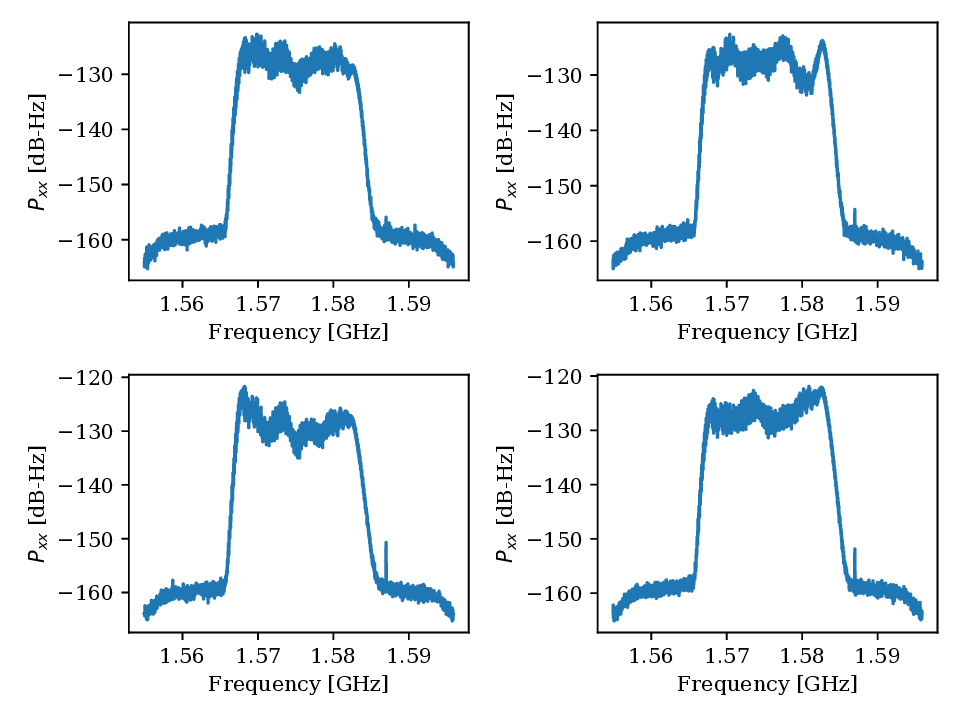
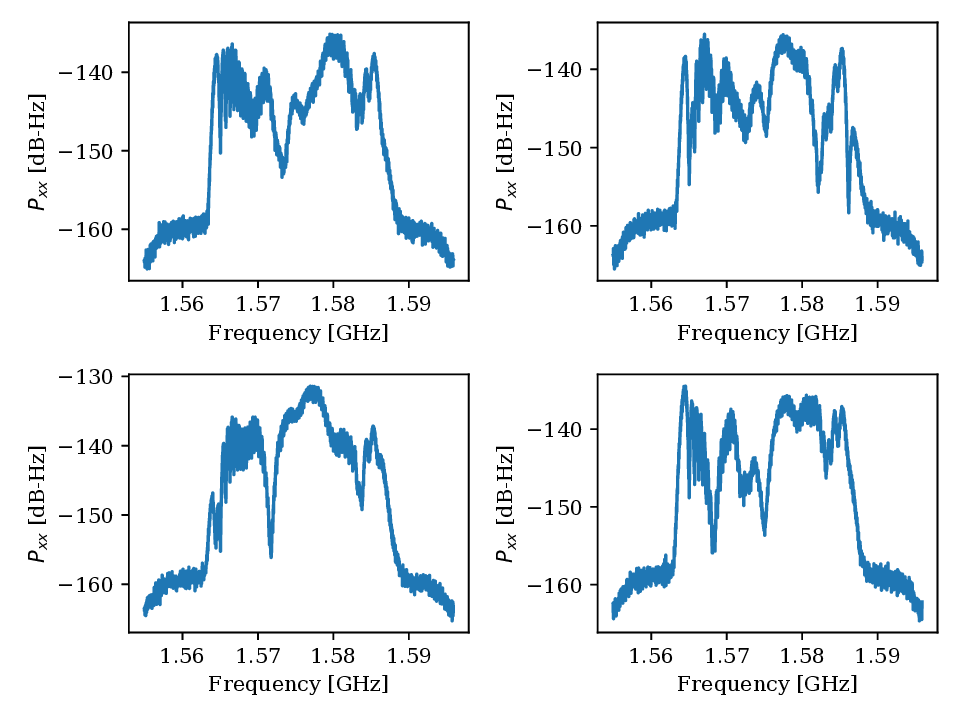
실험 시스템은 Ettus USRP X440 SDR 플랫폼과 3D 위치 시스템으로 구성된다. SDR는 4개의 안테나를 장착한 동적 플랫폼에 장착되어 다양한 궤적을 추적한다. 재밍 신호는 두 개의 프라이버시 보호 장치(PPD)에서 생성되며, 각각 20MHz와 25MHz의 대역폭을 가진 신호 대출 특성을 가진다.
데이터 수집은 산업 환경을 모방한 L.I.N.K. 테스트 및 애플리케이션 센터에서 진행되었다. 3D 위치 시스템은 안테나 플랫폼의 정확한 위치, 방향, 속도 및 가속도를 제공하며, 동기화된 데이터를 SDR 데이터 스냅샷과 결합하여 정확한 지표를 얻는다.
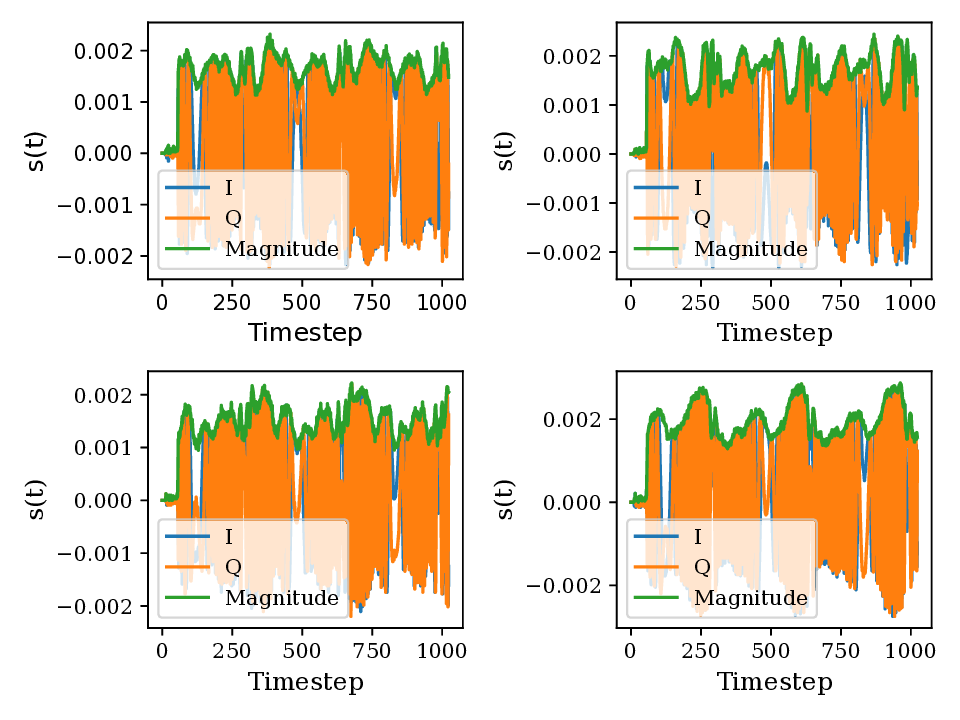
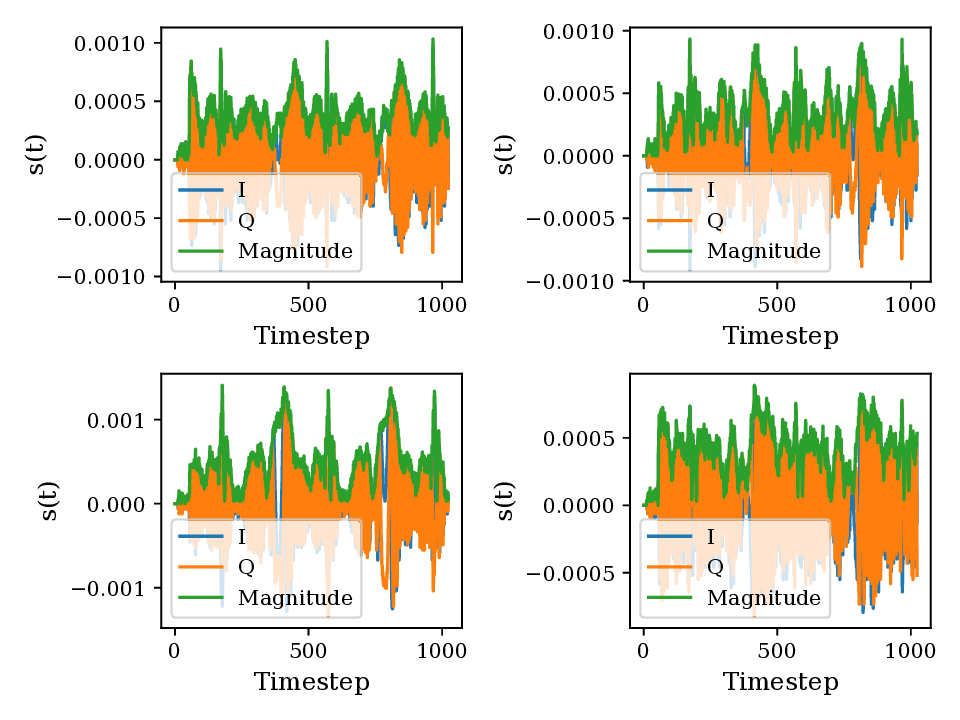
데이터셋은 두 개의 PPD에 대해 각각 80%와 20%로 분할되어 학습 및 테스트 세트로 사용된다. 각 샘플에는 4개의 안테나 채널, 122,880개의 시간 단계, 그리고 실부와 허부 신호가 포함되어 있으며, 총 기록 시간은 3ms이다. 모델 입력은 1024개의 시간 단계(25μs)로 제한되어 계산 효율성을 높인다.