멀리 떨어진 움직이는 물체를 잡는 로봇 엔드 이펙터의 혁신
📝 원문 정보
- Title: Casting Robotic End-effectors To Reach Faraway Moving Objects
- ArXiv ID: 1101.2268
- 발행일: 2011-01-13
- 저자: Adriano Fagiolini and Hitoshi Arisumi and Antonio Bicchi
📝 초록 (Abstract)
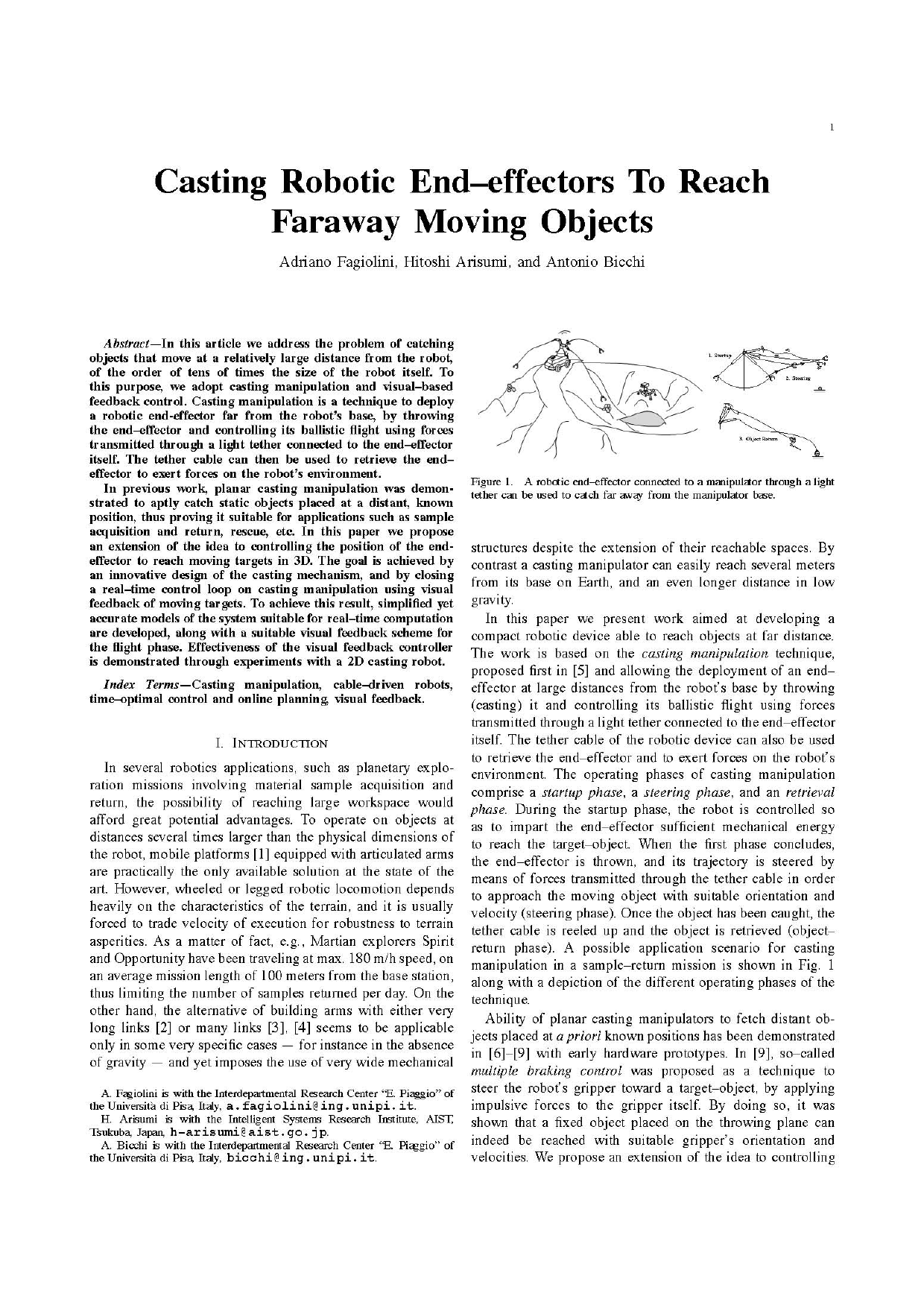
본 논문에서는 로봇이 수십 배에 달하는 거리에 있는 물체를 잡을 수 있도록 하는 문제를 다룹니다. 이를 위해 캐스팅 조작과 시각 기반 피드백 제어를 사용하였습니다. 캐스팅 조작은 가벼운 케이블을 통해 연결된 엔드 이펙터를 던지고, 그 비행 경로를 제어하여 로봇 베이스에서 멀리 떨어진 위치에 배치하는 기술입니다. 이후 이 케이블을 이용하여 엔드 이펙터를 회수하고, 로봇의 환경에 힘을 가할 수 있습니다. 기존 연구에서는 평면 캐스팅 조작이 원격, 고정된 물체를 적절히 잡는 데 성공함으로써 샘플 획득 및 반환, 구조 등 다양한 응용 분야에 적합함을 입증하였습니다. 본 논문에서는 이 아이디어를 확장하여 3차원 내 움직이는 타겟을 잡는 엔드 이펙터의 위치 제어를 제안합니다. 이를 위해 캐스팅 메커니즘의 혁신적인 설계와 실시간 제어 루프를 닫아 움직이는 타겟의 시각 피드백을 활용한 캐스팅 조작을 구현하였습니다. 이러한 결과를 달성하기 위해 실시간 계산을 위한 단순하면서도 정확한 시스템 모델과 비행 단계용 적절한 시각 피드백 스키마를 개발하였습니다. 시각 피드백 제어의 효과성은 2차원 캐스팅 로봇을 이용한 실험을 통해 입증되었습니다.💡 논문 핵심 해설 (Deep Analysis)
1. 캐스팅 조작의 원리와 적용
캐스팅 조작은 가벼운 케이블을 통해 연결된 엔드 이펙터를 던져 멀리 떨어진 위치에 배치하는 기술입니다. 이는 로봇이 직접 접근하기 어려운 거리를 극복할 수 있는 방법으로, 특히 원격 샘플 획득 및 반환, 구조 등 다양한 응용 분야에서 활용 가능합니다.
2. 3차원 움직이는 타겟 제어
본 논문은 기존의 평면 캐스팅 조작을 확장하여 3차원 공간에서 움직이는 물체를 잡는 데 초점을 맞추고 있습니다. 이를 위해 실시간 제어 루프를 닫아 움직이는 타겟에 대한 시각 피드백을 활용한 캐스팅 조작을 구현하였습니다.
3. 시스템 모델과 시각 피드백 스키마
실시간 계산을 위한 단순하면서도 정확한 시스템 모델이 개발되었습니다. 이는 캐스팅 엔드 이펙터의 비행 경로를 예측하고 제어하는 데 중요한 역할을 합니다. 또한, 비행 단계에서 적절한 시각 피드백 스키마가 개발되어, 움직이는 타겟에 대한 정확한 위치 정보를 제공합니다.
4. 실험 결과
본 논문은 실험을 통해 제안된 접근법의 효과성을 입증하였습니다. 특히, 2차원 캐스팅 로봇을 이용한 실험에서 시각 피드백 제어의 성능이 검증되었습니다.
5. 기술적 도전과 해결책
본 논문은 로봇 엔드 이펙터가 멀리 떨어진 움직이는 물체를 잡는 문제에 대한 기술적 도전을 다루고 있습니다. 이를 해결하기 위해 캐스팅 메커니즘의 혁신적인 설계와 실시간 제어 루프를 활용하였습니다.
6. 미래 연구 방향
본 논문은 로봇 엔드 이펙터가 움직이는 물체를 잡는 문제에 대한 기초적인 접근법을 제시하였지만, 아직 해결해야 할 많은 도전 과제가 남아 있습니다. 예를 들어, 더 복잡한 환경에서의 성능 향상, 다양한 타겟에 대한 적응성 개선 등이 미래 연구 방향으로 제시될 수 있습니다.
본 논문은 로봇 공학 분야에서 중요한 기여를 하였으며, 특히 원격 조작 및 움직이는 물체를 잡는 데 필요한 기술적 도전을 해결하는 데 있어 혁신적인 접근법을 제공하였습니다. 이러한 연구 결과는 다양한 응용 분야에서 활용 가능하며, 로봇 공학의 발전에 크게 기여할 것으로 예상됩니다.
📄 논문 본문 발췌 (Excerpt)
📸 추가 이미지 갤러리