Coalition Formation with Limited Information Sharing for Local Energy Management
Distributed energy systems with prosumers require new methods for coordinating energy exchange among agents. Coalitional control provides a framework in which agents form groups to cooperatively reduce costs; however, existing bottom-up coalition-for…
Authors: Luke Rickard, Paola Falugi, Eric C. Kerrigan
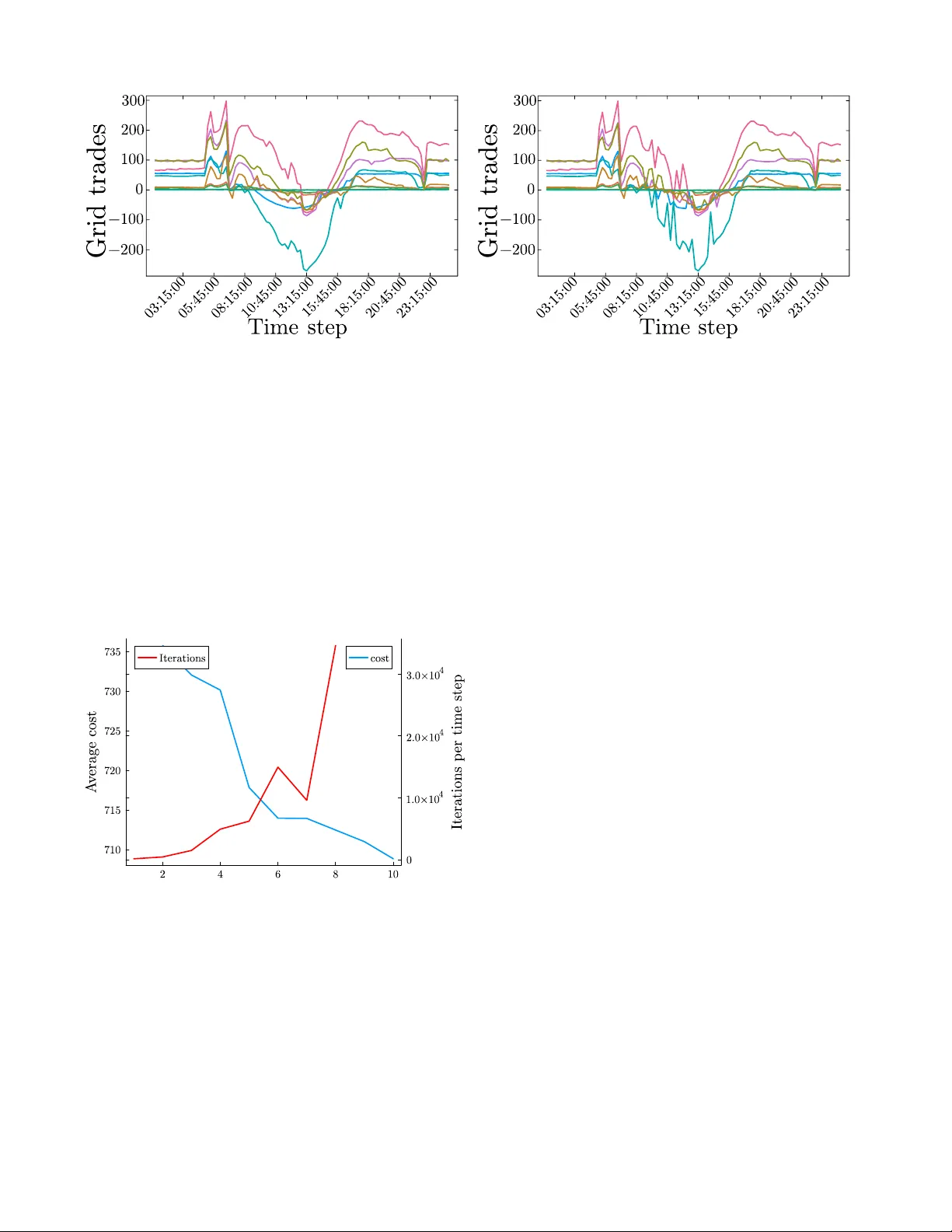
Coalition F ormation with Limited Inf ormation Sharing f or Local Energy Management* Luke Rickard 1 , Paola Falugi 1 and Eric C. K errigan 2 Abstract — Distributed energy systems with prosumers re- quire new methods for coordinating energy exchange among agents. Coalitional control pro vides a framework in which agents form gr oups to cooperatively r educe costs; howev er , ex- isting bottom-up coalition-formation methods typically require full information sharing, raising privacy concerns and imposing significant computational overhead. In this work, we pr opose a limited inf ormation coalition- formation algorithm that requires only limited aggregate in- formation exchange among agents. By constructing an upper bound on the value of candidate coalitions, we eliminate the need to solve optimisation problems for each potential merge, significantly reducing computational complexity while limiting information exchange. W e prove that the proposed method guarantees cost no greater than that of decentralised operation. Coalition strategies are optimised using a distributed ap- proach based on the Alternating Direction Method of Multi- pliers (ADMM), further limiting inf ormation sharing within coalitions. W e embed the framework within a model predictiv e control scheme and evaluate it on real-world data, demon- strating improved economic performance over decentralised control with substantially lower computational cost than full- information approaches. I . I N T R O D U C T I O N Energy production around the world is currently undergo- ing a significant paradigm shift from fossil fuels to rene wable energy sources. One part of this transition is the change from relying on a few large, high-capacity power plants to depending on many smaller , widely distrib uted generation units [1]. In particular , we are interested in the rise of “prosumers”, participants in the energy market who both consume and produce electricity [2], [3]. This motiv ates exploring nov el control techniques better suited to the new energy generation landscape. One promising area of research that leverages this shift in generation is coalitional contr ol [4], [5]. Coalitional control is an approach that considers grouping entities inv olved in a large problem into separate coalitions that can be solved separately . W e refer to this initial grouping of agents, before the subproblems are solved, as coalition formation. For the grid scenario, coalitional control can inv olve buildings agreeing to trade energy with one another, aiming to pay less than they would by interacting only with the grid. Forming coalitions allows agents to reduce their individual costs without incurring large computational or communi- cation ov erheads, and without sharing full local informa- tion with agents outside the coalition (once coalitions are *This work was supported by EPSRC grant EP/Z536106/1 1 Univ ersity of East London 2 Imperial College London formed). Re vealing priv ate information (such as usage data) in the case of the smart grid, can lead to vulnerabilities, allowing attackers to infer various household traits [6], [7]. Howe ver , while recent work that has explored bottom-up coalition formation [5] addresses computational complexity , it still requires full information sharing during coalition formation, negating these priv acy benefits. In particular , the technique in [5] required solving the complete optimisation problem for every pair of agents, requiring each agent to broadcast all optimisation variables and constraints to all other agents. Not only does this introduce priv acy concerns, but it also represents a computational bottleneck. W e seek a “limited information sharing” scheme that a voids sharing full local demand, generation, storage, and constraint data. Instead, agents only share tentati ve grid trade plans during coalition formation, and coalition trade plans afterwards. This reduces information shared and computational costs. W e make use of Model Predictiv e Control (MPC) tech- niques to optimise energy trades and battery charging pro- files, with forecasted energy usage and production for a day ahead. MPC has been studied in this context in [8], but it is limited to a single building, whereas we consider a group of buildings that may form into coalitions. Our work extends upon current extensions of MPC to coalitions [9], [10] by re- ducing the amount of information shared (and computational requirements) for each possible coalition formation step, and dynamically updates coalitions at ev ery time step to account for changing conditions. Coalitional control aligns with techniques in distributed control, such as the Alternating Direction Method of Mul- tipliers [11], explored for energy grids in [12], [13]. While distributed control provides a powerful frame work for op- timising systems composed of multiple agents, it typically assumes a fixed interaction structure and does not address how agents should be grouped. In many applications, form- ing such groups is desirable to limit information sharing, re- duce computational burden, or manage communication costs. Coalitional control addresses this by determining groups of agents (coalitions) that can then optimise their decisions jointly , e.g., using distributed optimisation techniques. In this work, we propose a coalition formation framework that reduces both computational complexity and information sharing. The approach enables agents to ev aluate potential coalition merges using only limited, aggregate information, without requiring full knowledge of local models or solving a full optimisation problem for each candidate mer ge. The main contributions of this paper are as follows: • W e propose a coalition formation algorithm that avoids Grid Buy Sell Buy Sell Buy Sell Coalition T rades F ull Information: All v ariables and constrain ts Limited Information: Grid T rades Only Fig. 1: Overvie w of the energy system with coalitions. Buildings may trade with the grid, or with other buildings within their coalition (but not those outside the coalition). Our limited-information approach shares only planned grid trades, whereas full-information methods require sharing all optimisation variables and constraints. solving optimisation problems for candidate merges by using an efficiently computable upper bound on coalition value. • The proposed method requires only aggregate grid trade information, thereby reducing information sharing and preserving agent priv acy . • W e prov e the resulting coalition structure guarantees a total cost no greater than that of decentralised operation. • W e integrate the proposed coalition formation scheme with distributed optimisation via ADMM and a model predictiv e control framework. • Numerical results on real-world data demonstrate im- prov ed performance ov er decentralised control and lower computational cost than full-information methods. While we focus on energy markets in this paper , our technique is generally applicable to all trading games, and we discuss how it may be extended to allow a trade-off between optimality and information sharing. A. Notation Where we have a sequence { G ( t ) } T t = 1 , we use G to refer to the entire sequence collectiv ely (i.e. G = { G ( t ) } T t = 1 ). I I . B AC K G RO U N D A. Building Model W e consider a collection of N buildings M 1 , . . . , M N , each with some fixed demand and generation profiles d i ( t ) , g i ( t ) ∈ R ≥ 0 , corresponding to the energy consumed, and produced, at each time step t across the time horizon T = { 1 , . . . , T } . Each building has a battery with initial state SoC i ( 1 ) = SoC init i , whose state SoC i ( t ) ∈ [ 0 , SoC i ] ev olves according to the following dynamics SoC i ( t + 1 ) = SoC i ( t ) + ρ c i u c i ( t ) − 1 ρ d i u d i ( t ) , (1) where ρ c i , ρ d i ∈ ( 0 , 1 ) are charge and discharge efficiencies respectiv ely , and u i = ( u c i , u d i ) ∈ [ 0 , u i ] 2 are charge and dis- charge signals. The building may trade energy with the grid by purchasing or selling energy to the grid at each time step G i ( t ) = ( G buy i ( t ) , G sell i ( t )) ∈ R 2 ≥ 0 , and we refer to the total trade with the grid as G tot i ( t ) = G buy i ( t ) − G sell i ( t ) . At each time step, the building i must satisfy a power balance d i ( t ) + u c i ( t ) = g i ( t ) + u d i ( t ) + G tot i ( t ) . (2) W e then define a linear cost function for each building as L i ( G i ) = T ∑ t = 1 P buy ( t ) G buy i ( t ) − P sell ( t ) G sell i ( t ) , (3) where P buy ( t ) , P sell ( t ) are the prices offered by the grid for buying and selling electricity . W e assume P buy ( t ) > P sell ( t ) > 0 for all t . Under this assumption, and with ρ c , ρ d ∈ ( 0 , 1 ) , simultaneous charging and discharging is suboptimal [14]. Finally , we denote the feasible set of variables { G i , u i } by X i = { G i ∈ R 2 × T ≥ 0 , u i ∈ [ 0 , u i ] 2 × T : d i ( t ) + u c i ( t ) = g i ( t ) + u d i ( t ) + G tot i ( t ) ∀ t ∈ T , SoC i ( t + 1 ) = SoC i ( t ) + ρ c i u c i ( t ) − 1 ρ d i u d i ( t ) ∀ t ∈ T , SoC i ( t ) ∈ [ 0 , SoC i ] ∀ t ∈ T ∩ { T + 1 } , (4) SoC i ( 1 ) = SoC init i } . B. Open-loop Optimisation W e first seek to minimise the cumulative cost for all build- ings ∑ N i = 1 L i ( G i ) in an open-loop fashion, we later consider how to extend to model predictive control in Section IV. W e therefore define an optimisation problem min { G i , u i }∈ X i , i = 1 ,..., N N ∑ i = 1 L i ( G i ) (5) 1) Decentralised: W e can naturally separate this problem into N linear programs N ∑ i = 1 min { G i , u i }∈ X i L i ( G i ) (6) which can then be solved directly using of f-the-shelf op- timisation packages. Howe ver , we can improve upon this optimum by allowing for buildings to form into groups, which we call coalitions, in which energy is freely traded to benefit all members of the coalition. C. Coalitions W e consider the problem of forming a coalitional structure, defined in the sequel, to reduce the shared cost of all agents. Definition 1 (Coalition Structur e): A coalition structure C = { C 1 , . . . , C M } , denotes a disjoint partitioning of the complete set of building indices M [ j = 1 C j = { i } N i = 1 , C i ∩ C j = / 0 , i , j = 1 , . . . , M , i = j . (7) Note that a coalition C j may be a collection of buildings, or a single building. W e now introduce the additional optimisation variables C buy i ( t ) , C sell i ( t ) ∈ R ≥ 0 for each building, which allow that building to buy from, and sell to, its coalition. Again, we use C tot i ( t ) = C buy i ( t ) − C sell i ( t ) to refer to the total traded with the coalition, and C i ( t ) = ( C buy i ( t ) , C sell i ( t )) to refer to the pair . The power balance in (2) is then amended to d i ( t ) + u c i ( t ) = g i ( t ) + u d i ( t ) + G tot i ( t ) + C tot i ( t ) , (8) and the constraint set X i is amended similarly (with other terms unaffected). For a giv en coalition C j ∈ C , we can then define the optimisation problem as V ( C j ) = min { G i , u i , C i }∈ X i , i ∈ C j ∑ i ∈ C j L i ( G i ) subject to ∑ i ∈ C j C tot i ( t ) = 0 , ∀ t ∈ T , (9) with a new constraint to maintain a power balance for the coalitional trades. For the entire coalition structure, we then seek to minimise the cumulativ e value ∑ M j = 0 V ( C j ) . W e now have M ≤ N linear programs, with the new constraint pre venting further separation. W e assume that trades within a coalition are settled at 0 cost; this allows us to focus on the limited information coalition formation mechanism and deri ve a simple achiev able upper bound. Extensions to unequal internal trading costs (e.g. to account for transmission costs) are left for future work. I I I . C O A L I T I O N F O R M A T I O N In order to optimise the cumulative cost of all agents, it is also necessary to optimise ov er coalition structures. W e now consider a number of techniques for performing this optimisation, with varying degrees of information sharing. W e assume that there is an upper bound on the size of a coalition C max ; this constraint may be introduced to limit the number of agents with whom operational information is shared, or to lo wer communication/computational ov erhead. A. Optimal (Size-Limited) Coalition First, we consider the problem of directly obtaining the true optimal coalition, hence we seek to solve min C ∑ C j ∈ C V ( C j ) subject to M [ j = 1 C j = { i } N i = 1 C j ∩ C k = / 0 , j , k = 1 , . . . , M , i = j | C j | ≤ C max , j = 1 , . . . , M , (10) which can be formulated as a mixed-integer linear program (due to the optimisation ov er coalition structures C ), since we now optimise also ov er each b uilding’ s membership of coalitions. The brute-force approach to solving this problem is to consider all possible sets of coalitions, find the optimal cost for each, and select the best amongst these. Howev er , this approach is combinatorial in the number of agents (requiring iteration over all possible partitions of a set). Algorithm 1 Bottom-Up Coalition Formation 1: A new ← { M 1 , . . . , M N } 2: repeat 3: A ← A new 4: for all a ∈ A do 5: { G ∗ i , u ∗ i , C ∗ i } i ∈ a ← arg min { G i , u i , C i } i ∈ a ∑ i ∈ a L i ( G i ) ▷ Subject to { G i , u i , C i } ∈ X i and ∑ i ∈ a C tot i ( t ) = 0 , t ∈ T 6: for all ˜ C ∈ { ( A j ∪ A k ) | j = 1 , . . . , | A | − 1 , k = j + 1 , . . . , | A |} do 7: if | ˜ C | ≤ max coalition size then 8: val ( ˜ C ) ← V ( A j ) + V ( A k ) − V ( ˜ C ) 9: sortedCosts ← sort ( v al ) 10: A new ← / 0 11: for ( ˜ C , val ) in sortedCosts do 12: if val ( ˜ C ) > 0 and ˜ C ∩ ( S A new ) = / 0 then ▷ Coalition beneficial and neither agent accounted for 13: A new ← A new ∪ { ˜ C } 14: A new ← A new ∪ ( A \ ( S A new )) ▷ Add all unpaired agents 15: until A new = A B. Bottom-Up Coalition F ormation [5] One less computationally expensi ve approach to approxi- mately solve the coalition formation is proposed in [5]. The algorithm is summarised in Algorithm 1. This algorithm cannot guarantee con ver gence to the op- timal coalition structure, but is significantly less computa- tionally intensi ve than solving (10) directly . The number of possible coalition structures of N agents grows according to the Bell numbers and is therefore combinatorial in N . Consequently , obtaining the optimal coalition structure by exhausti ve enumeration quickly becomes intractable. Algo- rithm 1 avoids this combinatorial search by iteratively ev alu- ating candidate pairwise merges among current coalitions. If m k denotes the number of coalitions at iteration k , then the number of candidate mer ges at that iteration is m k 2 = O ( m 2 k ) . C. Limited Information Coalition F ormation The approach in Algorithm 1 suffers from a crucial draw- back, namely the need to solve the complete optimisation problem for ev ery pair of agents, thereby sharing full local information with ev eryone. W e wish to av oid sharing data on individual agents’ consumption and generation behaviour . Not only does this raise priv acy concerns, but also introduces a computational burden for e very potential coalition. T o remov e this requirement, we recognise that only an upper bound on the solution to (9) is needed. W e denote by V ( C j ) , the upper bound on the joint cost receiv ed by coalition C j V ( C j ) ≥ V ( C j ) . (11) Then, we replace Line 8, with val ( ˜ C ) ← V ( A j ) + V ( A k ) − V ( ˜ C ) , (12) and proceed with the rest of the algorithm unchanged, forming coalitions only if this new bound is positi ve. The tighter this bound (by sharing more information), the better the final coalition structure. Hence, this trade-off giv es agents a choice between information sharing and optimality . Once coalitions are formed, we assume the following (in Section III-D, we discuss how this can be achiev ed without sharing priv ate information): Assumption 1 (V alue Knowledge of F ormed Coalitions): Once a coalition C j is formed, its true value V ( C j ) can be ev aluated exactly . W e then hav e: Theor em 1 (Limited Information Algorithm Properties): Consider Algorithm 1, with an upper bound V ( C j ) (satisfying (11)) on the joint cost in place of solving the optimisation problem in Line 8. Then the algorithm will satisfy the following properties 1) The resulting coalition structure satisfies Definition 1; 2) The algorithm terminates in a finite number of iterations; 3) The resulting coalition structure has a value at most equal to the decentralised optimum. Pr oof: W e consider each item in turn: 1) Since a coalition is accepted only if it does not ov erlap with a coalition already in the coalition structure (Line 12), and any coalitions not in a pair with another coalition are added at the end (Line 14), then the resulting coalition structure is valid. 2) W e initialise the algorithm with M = N coalitions (each agent in a singleton coalition). At each iteration, we either form new coalitions (strictly decreasing M ) or terminate. M is bounded below by ⌈ N C max ⌉ and decreases if coalitions form, so the algorithm terminates in at most N − ⌈ N C max ⌉ iterations. 3) Our proposed algorithm forms coalitions between pairs of coalitions a , b only if the upper bound satisfies V ( a ∪ b ) < V ( a ) + V ( b ) . (13) By assumption, V ( a ∪ b ) is a v alid upper bound which satisfies (11). Combining these inequalities, we ha ve V ( a ∪ b ) ≤ V ( a ∪ b ) < V ( a ) + V ( b ) , (14) so that any formed coalition offers a strict improvement in total cost compared to agents working indi vidually . Since our proposed algorithm forms coalitions iteratively , starting from the decentralised solution, and each coalition formation strictly reduces the total cost, the final coalition structure will hav e a total cost at most equal to the decentralised solution. Equality holds only when no coalitions are formed. 1) A Practical Bound: A very computationally cheap op- tion for this bound, that is also non-tri vial, is to share only our current planned net grid trades (calculated in a decentralised manner). W e then compare the grid consumption at each time step to check if some gain can be made. First, define Q j ( t ) = ∑ i ∈ A j G tot i ( t ) , (15) the total grid trade by a coalition. Then, check if the sequence Ξ jk ( t ) = Q j ( t ) Q k ( t ) , (16) contains any negati ve values (corresponding to one coalition buying (positive Q ) and the other selling (negati ve Q ) at the same time step). Then, the upper bound on coalition cost V ( A j ∪ A k ) is V ( A j ) + V ( A k ) (17) − ∑ t : Ξ jk ( t ) < 0 P buy ( t ) − P sell ( t ) min Q j ( t ) , | Q k ( t ) | , i.e. the sum across time steps of possible trades, if no further optimisation is performed. From this we can see that val ( ˜ C ) = ∑ t : Ξ jk ( t ) < 0 P buy ( t ) − P sell ( t ) min Q j ( t ) , | Q k ( t ) | (18) Cor ollary 1: The bound provided in (17) is a non-tri vial upper bound to the coalitional cost. Pr oof: W e show that the quantity in (17) is achiev able by explicitly constructing a feasible coalition strategy whose cost is exactly no greater than that bound. Since the optimal coalitional cost is no larger than the cost of any feasible strategy , this prov es that (17) is an upper bound. W e first prov e the result for two individual buildings i and j . The extension to general coalitions follo ws by linearity of the aggregate net grid exchange, with variables replaced by their coalitional aggregate values (e.g. Q i ( t ) in place of G i ( t ) ). W e hav e that the strategies G i , u i and G j , u j must already be feasible strategies for agent i and j , since they are solutions to the decentralised optimisation (with C i = C j = 0). W e fix u i and u j and do not alter these, and instead focus on shifting trades from the grid to the coalition. For each time step t , if Ξ i j ( t ) < 0, one building is buying from the grid while the other is selling at the same time step. In the decentralised solution, this results in simultaneous grid purchase at price P buy ( t ) and grid sale at price P sell ( t ) . Thus, we consider moving ∆ ( t ) = min {| G tot i ( t ) | , | G tot j ( t ) |} trade from the grid to the coalition. By instead directly exchanging ∆ ( t ) units of energy between the two buildings, we eliminate both the corresponding grid purchase and sale, yielding a cost reduction of ∆ ( t )( P buy ( t ) − P sell ( t )) . W e then hav e C tot i ( t ) = sign ( G tot i ( t )) · ∆ ( t ) , and C tot j ( t ) = − C tot i ( t ) so that C tot i ( t ) + C tot j ( t ) = 0, satisfying our coalition power bal- ance. Since ( G i ( t ) , u i ( t )) was feasible, and ˆ G tot i ( t ) + C tot i ( t ) = G tot i ( t ) , then the modified strategy ( ˆ G i , u i , C i ) also satisfies the power balance (with demand and generation profiles unchanged). W e now only modify our trades as ˆ G tot i ( t ) = G tot i ( t ) − C tot i ( t ) , and ˆ G tot j ( t ) = G tot j ( t ) + C tot i ( t ) = G tot j ( t ) − C tot j ( t ) . Thus, at time step t , the combined cost reduction is ( P buy ( t ) − P sell ( t )) G tot i ( t ) + G tot j ( t ) − ˆ G tot i ( t ) − ˆ G tot j ( t ) = ∆ ( t )( P buy ( t ) − P sell ( t )) , (19) where the quantity on the left is exactly equal to the cost reduction for buildings i and j . After the modification, building i reduces its grid purchase by ∆ ( t ) , and building j reduces its grid sale by ∆ ( t ) . By summing across time steps where Ξ i j ( t ) < 0, we obtain feasible coalitional cost V ( { i } ) + V ( { j } ) − ∑ t : Ξ i j ( t ) < 0 P buy ( t ) − P sell ( t ) ∆ ( t ) . Since the optimal coalitional cost V ( i , j ) is no larger than the cost of any feasible coalition strategy , we obtain the bound in (17). Thus, this bound is achie vable and is a valid upper bound on the coalitional cost. D. W ithin Coalition Optimisation Once a coalition structure is formed, we must also decide how to optimise the joint strategy of the coalition. Solving the optimisation problem centrally raises similar information sharing concerns to Algorithm 1, as it requires full informa- tion from all agents. T o address this, we adopt a distributed solution based on ADMM [11], which enables agents to com- pute their local decisions while coordinating only through limited information exchange. W e reformulate the coalition optimisation problem in a consensus form, allowing each agent to solve a local subproblem while enforcing agreement on shared variables through a coordinator . W e introduce auxiliary variables z i ∈ R T for each agent i , representing the consensus coalition trade schedule across the prediction horizon, and dual variables λ i ∈ R T . These variables enforce the coalition power balance constraint ∑ i z i ( t ) = 0 at each time step while allowing agents to solve their optimisation problems locally . For each agent i in coalition C l , we make use of the following update steps G i , k + 1 , u i , k + 1 , C i , k + 1 (20a) = arg min { G i , u i , C i }∈ X i L i ( G i ) + λ i , k ⊤ C tot i + c 2 ∥ C tot i − z i , k ∥ 2 z i , k + 1 = C tot i , k + 1 − 1 | C l | ∑ j ∈ C l C tot j , k + 1 (20b) λ i , k + 1 = λ i , k + c ( C tot i , k + 1 − z i , k + 1 ) , (20c) where (20a) is performed in parallel by all agents, and (20b, 20c) are performed centrally (the coordinator initialises λ i and shares the updated v alue at each iteration). W e use C tot i to denote the stacked vector of coalitional trades for agent i , and c is a user-selected regularisation parameter (guidance on selecting this parameter is av ailable in [11]). Note that this requires sharing only tentativ e coalition trades at each iteration, thereby ensuring that individual consumption and generation data remain priv ate. Since the problem is con ve x and can be written in a consensus form, standard ADMM con ver gence results apply [11] Since ADMM enforces the coalition balance constraint only asymptotically , early termination may result in viola- tions of the constraint ∑ i ∈ C j C tot i = 0 . T o ensure feasibility , we take the coalition trades from z i , which satisfy this constraint by construction. The local grid trades G i are then recomputed to restore the power balance constraint for each agent, while satisfying their non negativity constraints and keeping the control inputs u i fixed. This yields a feasible solution, at the expense of suboptimality . The local power balance is restored by updating the grid trades while keeping the control inputs u i unchanged, ensuring that the po wer- balance constraints are satisfied at each time step. I V . M O D E L P R E D I C T I V E C O N T RO L Our methods up to this point hav e dealt with open-loop optimisation of the energy purchasing problem. W e now consider applying our methods in a model predictive control (MPC) framework. W e introduce predicted consumption and generation pro- files ˆ d ( t + k | t ) , ˆ g ( t + k | t ) for k = 0 , . . . , min { T pred , T − t } , where ( ·| t ) denotes a value predicted at step t . W e assume that energy prices and battery dynamics are known precisely , so that this prediction is the only form of uncertainty . Then, for e very time step, we solve the open-loop optimi- sation problem using this predicted behaviour . W e utilise the first planned battery charge signal u ( t ) and (if applicable) the first coalition trade C ( t ) , and then purchase (or sell) energy as necessary to satisfy the po wer balance in (2). Note that, if our predictions are inaccurate, we may trade a different amount of energy with the grid than planned. Once we employ a strategy at time step t , we uncov er the realised stage cost R ( C j )( t ) = ∑ i ∈ C j P buy ( t ) G buy i ( t ) − P sell ( t ) G sell i ( t ) . (21) When employing a coalition formation algorithm, we use predicted data to solve the coalition formation problem. Coalitions are reformed at ev ery time step to adapt to changing conditions, and, after coalitions are formed, we check if any violate the following inequality R ( C j )( t ) ≤ ∑ i ∈ C j R ( { i } )( t ) . (22) If this condition is violated, then this coalition is dissolved and constituent agents work indi vidually . In this way , we guarantee that our algorithm performs no worse than the decentralised optimum. As in the decentralised case, if predictions are inaccurate, we trade dif ferent amounts with the grid, maintaining coalition trades and charging signal. Theor em 2 (MPC with Coalition F ormation): Consider the predictions ˆ d ( t | t ) = d ( t ) , ˆ g ( t | t ) = g ( t ) . Let { C j ( t ) } M ( t ) j = 1 be the coalition structure formed at time t , and define J MPC coal = T ∑ t = 1 M ( t ) ∑ j = 1 R ( C j ( t ))( t ) (23) J MPC dec = T ∑ t = 1 N ∑ i = 1 R ( { i } )( t ) . (24) Where, in the coalitional case, any coalitions not satisfying (22) are dissolved and agents work indi vidually on that time step. Then, despite coalitions being reformed at ev ery time step, J MPC coal ≤ J MPC dec . (25) Pr oof: At each time step t , we enforce: R ( C j ( t ))( t ) ≤ ∑ i ∈ C j ( t ) R ( { i } )( t ) . (26) T ABLE I: A verage costs for open-loop (TO denotes timeout) Cost (euros) Scheme 70 Buildings 8 Buildings Decentralised 239 454 Centralised 101 430 Limited Information 232 430 Bottom-Up 157 431 Optimal Coalition TO 430 Summing over all time steps and coalitions we have T ∑ t = 1 M ( t ) ∑ j = 1 R ( C j ( t ))( t ) ≤ T ∑ t = 1 M ( t ) ∑ j = 1 ∑ i ∈ C j ( t ) R ( { i } )( t ) , (27) which giv es J MPC coal ≤ J MPC dec . V . N U M E R I C A L R E S U LT S W e make use of a real-world dataset [15], [16] to perform experiments, with energy usage recorded for 15-minute time slots, predictions for both generation and demand, battery data and energy prices taken from this dataset 1 . Whenev er we seek to solve (9) for V ( C | ) , we perform ADMM until the primal residual is less than 10 − 5 , and use a penalty parameter c = 1 2 . The experiments, therefore, focus on assessing the impact of limited-information coalition formation, rather than differences in the underlying optimisation solver . W e use a coalition size limit that allows computations to be completed within a reasonable time frame, while offering reasonable cost reductions (for our limited information approach, we compare different coalition sizes in Section V -D). All simu- lations were performed using 2 CPU cores at 2.6 GHz and 4 GB RAM. A. Open Loop Optimisation Results are presented in T able I for the open loop optimisa- tion problem using first all 70 b uildings, and then 8 b uildings, with a maximum coalition size of 7 buildings, and planning for a single day ahead. For 70 agents, the optimal coalition problem was terminated after being unable to find a solution within 24 hours. As can be seen, our algorithm offers an improvement over the decentralised scheme in both cases, and is ev en able to perform optimally when solving with 8 buildings. Despite the Bottom-Up algorithm outperforming our algorithm for the complete set of b uildings, we will see in Section V -C, this comes at a cost of increased computation, and greater information sharing. The brute force approach to identify the true optimum coalition requires substantial computation (as discussed in Section III), and was unable to finish within 24 hours for 70 buildings. 1 Code is av ailable at https://github.com/lukearcus/ Coalition_grid . T ABLE II: A verage costs for MPC (TO denotes timeout) Cost (euros) Scheme Cost (euros) ADMM Iterations Runtime (s) Decentralised 496 - 17 Centralised 475 14986 50700 Limited Information 489 1362 4067 Bottom-Up 478 18652 63432 Optimal Coalition TO - - B. Model Pr edictive Contr ol W e now compare our techniques against existing methods when implementing a model predictive controller . In T able II we compare the cost achieved, number of ADMM iterations per time step (including both for coalition formation, and within-coalition solving) and runtime, for 10 b uildings across the full horizon (1 day) with a 2-hour prediction horizon, and with coalitions restricted to a maximum of 6 buildings. W e see that our limited information algorithm achiev es a lower cost than the decentralised scheme, without incurring a significant computational burden. In Figure 3, we see how the formation of coalitions af fects trades with the grid. Under the coalition formation scheme, trades follo w a similar en velope but spike toward zero when trades are beneficial as agents trade with each other, not the grid. Once again, the brute force approach to find the optimal coalition was too computationally intensiv e to terminate in time. C. Scalability In Figure 2, we provide a comparison of the average number of ADMM iterations needed per time step for a varying number of b uildings N , using the same setup for MPC as the previous section. W e allo wed a maximum of 72 hours total computation time for each algorithm. As can be seen, our limited information coalition formation technique outperforms both other algorithms as the number of b uildings becomes larger , and is still able to maintain relativ ely few iterations until conv ergence, e ven with 24 buildings. Fig. 2: Number of ADMM iterations vs Number of buildings for different schemes (a) Decentralised (b) Limited information coalitions Fig. 3: Grid trades (in kWh, positi ve buy , neg ativ e sell) for a day under decentralised and limited information coalitions. D. Coalition Size For our proposed limited information scheme, we compare the effects of different choices for maximum coalition size in Figure 4. W e used 20 buildings, a time horizon of 1 day , and a 2-hour lookahead. As we expect, the lar ger the coalition the more computationally intensi ve the problem becomes, b ut the lower the av erage cost. This suggests that a trade-off between coalition size and cost should be sought. For our previous experiments, we identified a maximum coalition size of six as offering a reasonable trade-off. Fig. 4: Maximum coalition size affect on number of ADMM iterations, and average cost. V I . C O N C L U S I O N S Our results demonstrate that coalitional formation is achiev able with limited information sharing while main- taining improved performance ov er the decentralised case. These preliminary results raise several av enues for future work, including analysing the trade-off between information sharing and optimality , exploring stronger guarantees than improv ement over the decentralised optimum, extending to more general coalition formation problems and addressing uncertainty in future predictions for MPC. R E F E R E N C E S [1] T . B. Nadeem, M. Siddiqui, M. Khalid, and M. Asif, “Distributed energy systems: A revie w of classification, technologies, applications, and policies, ” Energy Strate gy Reviews , vol. 48, p. 101096, 2023. [2] W . L. Filho, L. V . Tre visan, A. L. Salvia, J. Mazutti, T . Dibbern, S. R. de Maya, E. F . Bernal, J. H. P . P . Eustachio, A. Sharifi, M. del- Carmen Alarc ´ on-del Amo, and I. Kushnir, “Prosumers and sustainable dev elopment: An international assessment in the field of renewable energy , ” Sustainable Futures , vol. 7, p. 100158, 2024. [3] Y . Parag and B. K. Sovacool, “Electricity market design for the prosumer era, ” Nature Ener gy , 2016. [4] F . Fele, J. M. Maestre, and E. F . Camacho, “Coalitional control: Co- operativ e game theory and control, ” IEEE Contr ol Systems Magazine , vol. 37, no. 1, pp. 53–69, 2017. [5] F . Fele, J. M. Maestre, and E. F . Camacho, “Coalitional control: A bottom-up approach, ” in ACC , pp. 4074–4079, IEEE, 2015. [6] G. Giaconi, D. Gunduz, and H. V . Poor , “Priv acy-aware smart me- tering: Progress and challenges, ” IEEE Signal Processing Magazine , vol. 35, no. 6, pp. 59–78, 2018. [7] R. Razavi and A. Gharipour, “Rethinking the privac y of the smart grid: What your smart meter data can re veal about your household in ireland, ” Energy resear ch & social science , vol. 44, pp. 312–323, 2018. [8] F . Oldewurtel, A. Parisio, C. N. Jones, D. Gyalistras, M. Gwerder , V . Stauch, B. Lehmann, and M. Morari, “Use of model predictiv e control and weather forecasts for energy efficient building climate control, ” Energy and Buildings , vol. 45, pp. 15–27, 2012. [9] P . R. Baldivieso-Monasterios and P . A. Trodden, “Coalitional predic- tiv e control: Consensus-based coalition forming with robust regula- tion, ” Automatica , vol. 125, p. 109380, 2021. [10] A. S ´ anchez-Amores, P . Chanfreut, J. Maestre, and E. F . Camacho, “Robust coalitional model predictive control with negotiation of mu- tual interactions, ” J ournal of Pr ocess Control , vol. 123, pp. 64–75, 2023. [11] S. P . Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein, “Distributed optimization and statistical learning via the alternating direction method of multipliers, ” F ound. Tr ends Mach. Learn. , vol. 3, no. 1, pp. 1–122, 2011. [12] L. Lanza, T . Faulwasser , and K. W orthmann, Distributed optimization for ener gy grids: a tutorial on ADMM and ALADIN , ch. Chapter 5, pp. 121–145. [13] Y . Zhang, M. Hong, E. Dall’Anese, S. V . Dhople, and Z. Xu, “Distributed controllers seeking A C optimal power flow solutions using ADMM, ” IEEE Tr ans. Smart Grid , vol. 9, no. 5, pp. 4525– 4537, 2018. [14] A. Joshi, H. Kebriaei, V . Mariani, and L. Glielmo, “ A sufficient condition to guarantee non-simultaneous charging and discharging of household battery energy storage, ” CoRR , vol. abs/2104.06267, 2021. [15] A. Le Franc and M. Ittel, “The EMSx dataset. ” https://zenodo.org/records/5510400#.YUizGls69hE, 2021. [16] A. Franc, P . Carpentier, J.-P . Chancelier , and M. De Lara, “EMSx: a numerical benchmark for energy management systems, ” Ener gy Systems , vol. 14, pp. 1–27, 02 2021.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment