Toward Distributed User Scheduling and Coordinated Beamforming in Multi-Cell mmWave Networks: A Sensing-Assisted Framework
Providing guaranteed quality of service for cell-edge users remains a longstanding challenge in wireless networks. While coordinated interference management was proposed decades ago, its potential has been limited by computational complexity and back…
Authors: Tenghao Cai, Lei Li, Shutao Zhang
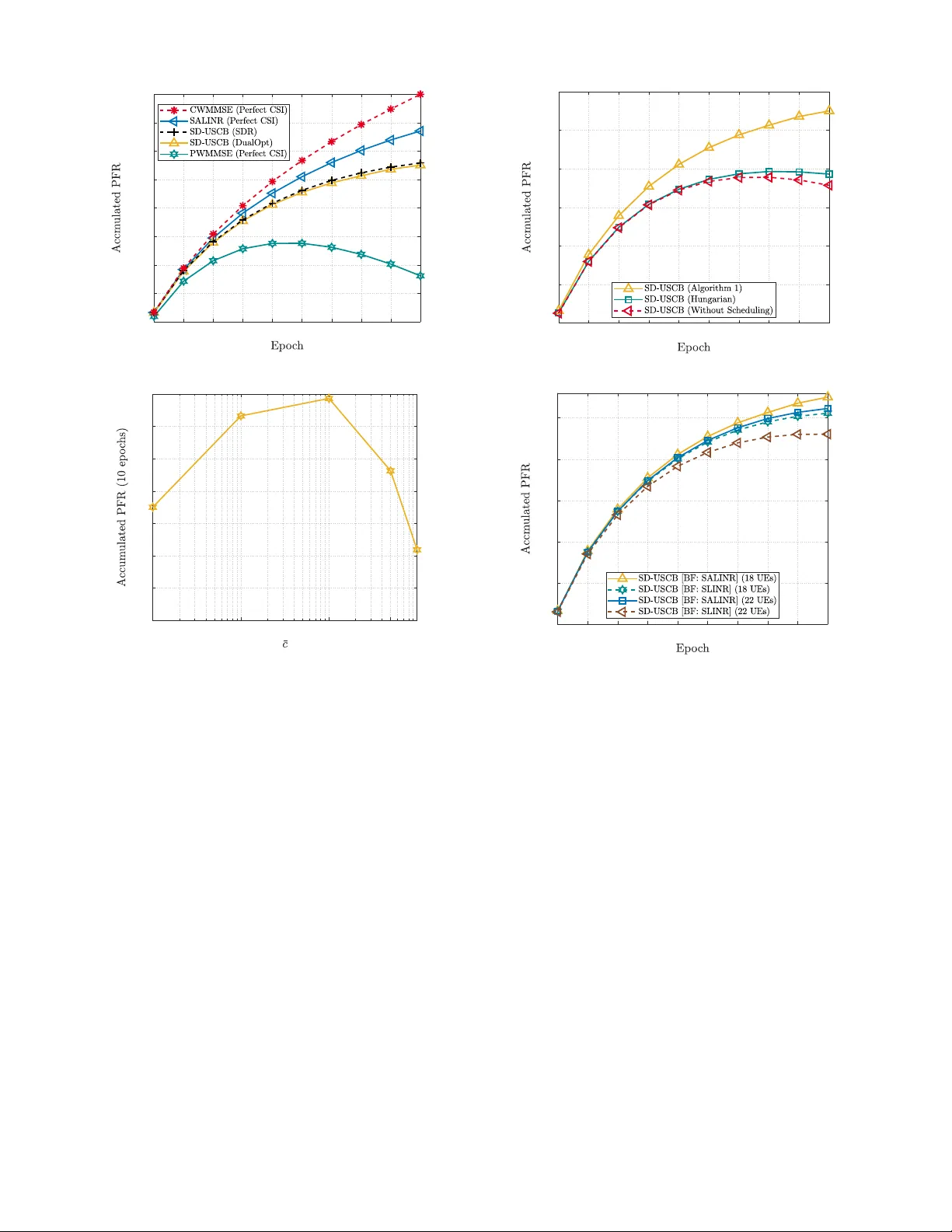
1 T o ward Distrib uted User Scheduling and Coordinated Beamforming in Multi-Cell mmW av e Networks: A Sensing-Assisted Frame work T enghao Cai, Lei Li, Member , IEEE , Shutao Zhang and Tsung-Hui Chang, F ellow , IEEE Abstract —Providing guaranteed quality of service f or cell- edge users r emains a longstanding challenge in wireless net- works. While coordinated interference management was pro- posed decades ago, its potential has been limited by computa- tional complexity and backhaul resour ce constraints. Distributed user scheduling and coordinated beamforming (D-USCB) offers a scalable solution but faces practical challenges in acquiring inter -cell channel state inf ormation (CSI), as base stations (BSs) are often r estricted to signal strength measur ements, and high- dimensional CSI exchange incurs substantial overhead. Inspired by integrated sensing and communication (ISA C), this paper proposes a sensing-assisted D-USCB (SD-USCB) framework to maximize the network throughput of multi-cell mmW ave net- works. Firstly , the framework leverages channel kno wledge maps (CKMs) that map user locations to CSI estimates, where user locations are proactiv ely sensed via ISA C echoes. Secondly , we employ a signal-to-av erage-leakage-plus-interference-plus-noise ratio (SALINR) metric f or distributed ISA C beamforming op- timization, in which BSs simultaneously communicate with users and sense their locations. These two components jointly enable distributed coordinated transmission with only user location in- formation exchanged among BSs, thereby substantially r educing backhaul overhead. In addition, we devise efficient distributed user scheduling and ISA C beamforming algorithms to jointly optimize communication and sensing perf ormance. Extensive nu- merical r esults demonstrate significant impro vements in network throughput, validating the efficacy of the proposed framework. Index T erms – Multi-cell coordination, CSI acquisition, ISA C, distributed optimization. I . I N T RO D U C T I O N Multi-cell coordinated resource allocation (MCRA) has been widely recognized as a promising approach to impro ving the cell-edge performance of wireless networks [2]. By judi- ciously designing user scheduling and transmit beamforming (BF), MCRA can effecti vely mitigate inter-user interference and exploit the spatial degrees of freedom to enhance the capacity in multi-cell networks. Traditional centralized MCRA (C-MCRA) schemes typically require a central unit (CU) to collect global channel state information (CSI) from base stations (BSs) via backhauls to perform global optimization [3]. Howe ver , with the increased number of antennas, the channel dimension e xpands, and the CSI collection in C- MCRA can introduce significant overhead, giv en that both the intra-cell CSI of each BS and the inter -cell CSI are required. T . Cai is with the School of Science and Engineering, The Chinese Univ ersity of Hong K ong, Shenzhen (CUHK-Shenzhen), China, and with the Shenzhen Re- search Institute of Big Data (SRIBD). L. Li and T .-H. Chang are with School of Artificial Intelligence, CUHK-Shenzhen and with the SRIBD. S. Zhang is with the Networking and User Experience Laboratory , Huawei T echnologies, Shenzhen, China (email: 221019048@link.cuhk.edu.cn, lei.ap@outlook.com, zhangshutao2@huawei.com, tsunghui.chang@ieee.org). An earlier version of this paper was presented in part at the IEEE ICASSP 2024 [1]. Moreov er , the computational complexity of C-MCRA schemes escalates with the growing number of BSs and users, making them poorly scalable to larger netw orks [4]. In contrast, lev eraging iterati ve distrib uted optimization methods such as primal/dual decomposition, alternating direc- tion method of multipliers (ADMM), or the virtual interference approach, distributed MCRA (D-MCRA) schemes [5] were proposed to enable distrib uted optimization and parallel com- putation. By introducing local variable copies and consensus variables, the original centralized problem can be decomposed into smaller local subproblems, each solv ed at indi vidual BSs. These subproblems are then coordinated to obtain a solution to the original large problem through iterativ e updates of local and consensus variables. As the optimization is distributed, the computational burden at each BS is ef fecti vely reduced. Howe ver , these methods are still not satisfactory in practical systems as they require a large number of iterations and information e xchange across BSs. In addition, these D-MCRA methods face several practical challenges, including i) CSI acquisition: most existing D- MCRA methods assume that both intra-cell CSI and inter -cell CSI are av ailable beforehand, whereas acquiring such infor - mation is highly non-tri vial in practical systems. Specifically , the intra-cell CSI can be obtained via pilot-based estimation at the user , which then feeds the estimate back to the BS. The inter-cell CSI, ho we ver , is not always av ailable at the BS. According to [6, 7], in the coordinated transmission mode, the neighboring BS can only obtain the reference signal recei ved power (RSRP) measurements of the inter -cell channels through user feedback 1 . Consequently , BSs only have access to the signal strength rather than full inter-cell CSI estimates. ii) substantial overhead of inf ormation exchange: including inter-cell CSI exchange before optimization and intermediate variable (e.g., consensus variable) updates during iterations. In practice, giv en the limited bandwidth of backhauls (e.g., IP- RAN) connecting BSs, frequent exchange of high-dimensional information imposes significant ov erhead and delays, leading to outdated information and degraded netw ork performance. In this work, we in vestigate the D-MCRA design in multi- cell mmW av e networks, aiming to maximize the network throughput characterized by the proportional fairness rate (PFR) via distributed user scheduling and coordinated BF (D- USCB) with significantly reduced information exchange ov er- head. T o address the 1st challenge of inter -cell CSI acquisition, we propose a sensing-assisted distributed USCB (SD-USCB) 1 For a user with joint transmission from multiple BSs, it will feed CSI back to multiple BSs, but not in the case of coordinated transmission. 2 IS AC Beam Int ra - ce ll Ch an ne l Int er - ce ll Ch an nel CKM f o r CSI q u ery Int er - cell CSI (fo r D - MC RA d esi g n ) Pr o ac ti v e sen sin g Ex ch an g ing v ia ba ck h aul Pr o ac ti v e sen sin g CKM f or CSI qu ery U ser l oc at io n CKM Bac kh a u l IS AC ec ho e s User l o ca ti o n Int er - cell CSI (f o r D - MC RA de sign) Fig. 1. Proposed SD-USCB framework: BSs in the network transmit ISA C signals to simultaneously con ve y the data to users and sense the user locations. The sensed locations are then exchanged through the backhaul to enable neighboring BSs to know the locations of activ e users. W ith the exchanged locations, BSs query the pre-built CKMs to obtain the inter-cell CSI estimates for subsequent D-MCRA designs. framew ork. As shown in Fig. 1, in this framew ork, a channel knowledge map (CKM) [8], which is a BS-specific database mapping user locations to their corresponding (statistical) channel knowledge, is built from the RSRP measurements at each BS to provide the inter-cell CSI statistics like the channel angular power spectrum (APS) [9]. Inte grated sensing and communication (ISA C) transmission is then introduced to enable BSs to proactiv ely sense the users’ locations, which are input to the CKM for the inter -cell CSI query . T o cope with the 2nd challenge of substantial inter-cell information exchange, we introduce a leakage-based metric named ‘signal-to-a verage-leakage-plus-interference-plus-noise ratio (SALINR)’ [10] as a surrogate of signal-to-interference- and-noise-ratio (SINR). This transforms the required inter- cell CSI from incoming inter-cell channels to outgoing inter- cell channels 2 . With available outgoing CSI, SALINR-based approximation enables fully distributed optimization, eliminat- ing the cross-cell exchange of intermediate variables during optimization iterations required by existing distributed meth- ods [5, 11]. Most importantly , by incorporating the SALINR- based optimization into the SD-USCB framework, each BS only shares its scheduled users’ locations with the other BSs, enabling them to attain the outgoing inter-cell CSI estimates readily via the CKM. As there is no need to exchange the high-dimensional channel estimates, this significantly reduces the cross-cell backhaul ov erhead. In this framework, we further study user scheduling and coordinated BF designs. First, each BS greedily selects a set of scheduling users using a virtual zero-forcing (ZF) beamformer , which targets users with distinct geographical locations and weak channel correlation. Secondly , since the coordinated BF impacts both the communication performance and the sensing for user localization, it is formulated as an ISA C SALINR BF optimization problem for PFR maximization subject to sensing error constraints. By employing fractional programming (FP) [12] and successive con ve x approximation (SCA) techniques [13], we cope with the non-con vexity of the problem and dev elop an efficient algorithm based on dual optimization. Finally , the CKM construction from the RSRP measurements 2 The incoming channels to BS-A refer to the inter-cell interference (ICI) channels from BS-B to the users served by BS-A, which, from the perspective of BS-B, are termed outgoing inter-cell channels. by lev eraging local statistical channel modeling (LSCM) tech- niques [9] is illustrated. T ogether, our proposed framework effecti vely improves the network performance while greatly reducing the coordination overhead, offering a promising D- USCB paradigm for multi-cell mmW av e networks. A. Related W orks 1) Multi-cell Coor dinated T ransmission: While multi-cell coordinated transmission through joint scheduling and BF can mitigate interference and enhance network performance [14], traditional C-MCRA approaches require a CU to collect CSI from all BSs [15], incurring significant signaling overhead in the cross-cell backhauls and substantial computational burden at the CU, limiting scalability in lar ge networks. In contrast, D-MCRA decomposes the original problem into local subproblems optimized at individual BSs, reducing complexity and improving scalability . [10, 11, 16]. Leveraging the ADMM algorithm, [16] replaced the ICI po wer coupled among BSs with intermediate variables and introduced local variable copies as consensus variables, dividing the power minimization problem into multiple local subproblems. Dur- ing optimization, each BS solves its local subproblem and exchanges updated variable values iterati vely to achiev e global consensus. Similarly , the distrib uted BF algorithm [11] approx- imated the performance of centralized schemes by exchang- ing a ‘scalarized ICI’. Howe ver , these distributed schemes typically require a lar ge number of iterations to con verge and iterati ve inter-BS exchange of variable v alues, leading to significant signaling overhead and latency , particularly over bandwidth-constrained backhauls. T o address these issues, [10] introduced a distributed BF scheme that only exchanges virtual interference channels and BF po wers among BSs in optimization, achieving near- centralized performance with only two rounds of information exchange. As a surrogate of SINR, signal-to-leakage-and-noise ratio (SLNR) was introduced [17] to manage the interference caused by the desired signal affecting all other users in other cells without considering ICI, eliminating the iterativ e inter-cell exchange of the intermediate variables. Howe ver , since the BF po wer is scaled equally in both the numerator and denominator, SLNR is less effecti ve for guiding power allocation. Signal-to-leakage-plus-interference-plus-noise ratio (SLINR) extended this by accounting for both intra-cell inter- ference and leakage to users in neighboring cells [18, 19]. Howe ver , SLINR’ s reliance on coupled scheduling variables makes cross-cell leakage estimation challenging. Moreov er , discrepancies between leakage-based surrogates (SLNR and SLINR) and SINR could lead to degraded performance for multi-cell transmission. Critically , all these works [10, 11, 16–19] assume full intra- cell and inter-cell CSI availability – a requirement seldom met in practical 5G frequency di vision duplex systems, where users can estimate intra-cell channels and return them to their serving BS, but they only measure and report the RSRP for inter-cell channels to neighboring BSs. This gap, combined with the substantial ov erhead of exchanging high-dimensional inter-cell CSI, presents significant unresolved challenges for real-world D-MCRA implementation. 3 2) ISAC and sensing-assisted communication: W ith the potential to bring improv ed dual-functional performance at reduced cost, ISA C has been recognized as one of the key enabling technologies for next-generation (next-G) wireless networks [20]. The scenarios of most existing ISA C trans- mission designs can be di vided into two main cate gories: scenarios where sensing tar gets and communication users are separate and independent [21–25], and sensing-assisted communication where users also serv e as sensing targets [26– 28]. The work [21] optimized the ISA C BF for a network including a single sensing target and multiple communication users by minimizing the sensing Cramer-Rao bound (CRB) subject to per-user communication SINR constraints. Consid- ering a scenario of bi-static multi-target sensing and multi- user DL communication [22], an ISAC BF algorithm was proposed to minimize the weighted sum of sensing CRB while ensuring the network throughput. In [24], the joint fronthaul compression and power allocation design was in vestigated in a networked ISA C system based on the cloud radio access (C-RAN) architecture, where multiple BSs cooperativ ely lo- calize one target while transmitting data to multiple users. In [25], the ISA C precoding for a multi-cell ISA C system with multiple users and a single target per cell is studied, and two algorithms were devised using semidefinite relaxation (SDR) [29] and alternating optimization. Howe ver , these ISA C transmission designs [22–25] consider separate target(s) and users, assuming the av ailability of CSI without explaining how it is acquired. The 2nd category – sensing-assisted communication design – has gained increasing attention. By sensing the propagation en vironment and/or the kinematic states of users from ISA C echoes, the BS can reduce pilot transmissions and obtain channel estimates more efficiently , especially in LoS-dominant mmW a ve scenarios. For example, [26] lev eraged ISAC trans- missions to sense scatterers, greatly reducing user feedback for accurate CSI recov ery . The work [27] proposed using ISAC echoes to track vehicular users’ kinematic states. Assuming LoS channels and negligible inter-user interference, an EKF- based state tracking scheme was dev eloped for predicti ve BF , reducing beam tracking o verhead ef fectively . Building on this, [28] incorporated CSI acquisition errors and inter- user interference, formulating a rob ust ISA C BF problem that minimizes maximum sensing errors while ensuring worst-case communication rates, and developed a series of ef ficient first- order algorithms in comple x propagation environments. While these works [26–28] offered valuable insights into sensing- assisted communication design, they mainly focused on single- cell scenarios. The research on sensing-assisted communica- tion in multi-cell coordinated ISA C is still in its infancy , where increased interference and coordination complexity demand new framew orks and distributed algorithms for D-MCRA. 3) CKM: As mentioned above, efficient CSI acquisition is crucial for adapti ve transmission design but remains chal- lenging in practice. W ith the denser wireless nodes and the advance of more div ersified localization techniques, next-G wireless networks are en visioned to ha ve copious sources of location-specific channel data, such as the recei ved signal strength, gains, and angles of channel paths [30]. As spatial samples of the channel, the data reflects the wireless radio en vironment [9]. With denser nodes in the network and the fact that a multitude of users w ould appear repeatedly at nearby locations like roads and stadiums, the granularity of these samples will get finer . Lev eraging the large amount of data, the network can apply powerful data mining and signal processing techniques to extract key wireless propagation features. Inspired by this, the concept of channel kno wledge map was recently proposed [8, 30], which is a site/BS-specific database with locations of transceiv ers to provide location- specific channel knowledge. In [31], a specific type of CKM – beam index map – was constructed to facilitate the mmW a ve beam alignment with reduced ov erhead. The work [32] pro- posed a clutter suppression approach to improve the sensing accuracy of ISA C systems by constructing a clutter angle map (CLAM) containing the main clutter angles at each location of interest as a CKM. By extracting the intrinsic wireless channel characteristics from collected samples, CKM provides a promising way for efficient low-ov erhead CSI acquisition, facilitating environment-a ware transmission designs. B. Contributions In this work, integrating CKM and ISA C, we propose a nov el SD-USCB framework and dev elop efficient D-USCB algorithms. Our main contrib utions are summarized as follo ws: 1) T o overcome the CSI acquisition and inter-cell infor- mation exchange bottlenecks in distributed multi-cell coordinated transmission, we propose a nov el SD-USCB framew ork for sum PFR maximization. This framew ork lev erages ISAC transmission to proactively sense user locations, which are exchanged across BSs and input into constructed CKMs to obtain cross-cell CSI esti- mates. Compared with exchanging full-dimension CSI, this design greatly reduces cross-cell information ex- change. Moreov er , by approximating the SINR with our previously proposed leakage-based metric SALINR [10], the multi-cell coordinated BF problem can be solved fully distributiv ely at each BS, a voiding iterati ve v ariable exchange in traditional methods. 2) W e prove that the SALINR-based approximate rate achiev es a smaller e xpected error relative to the true rate than the conv entional SLINR-based approximation in Rayleigh channels. This result theoretically confirms, for the first time, the superiority of SALINR ov er SLINR in SINR approximation. 3) T o solv e the intricate SALINR-based approximate prob- lem with strong coupling between scheduling and BF variables in SD-USCB, we propose a two-stage scheme. First, an enhanced proportional fairness zero-forcing greedy (PFZFG) algorithm schedules users based on local information in each cell. Then, an ISA C BF optimization problem is formulated to maximize the approximate sum PFR under sensing constraints. T o solve it, we apply FP techniques to handle the non-con ve x objectiv e and SCA techniques to manage non-con vex constraints, yielding a con vex approximate problem. Exploiting the problem structure, we customize a computationally efficient ISA C BF algorithm based on dual optimization (DualOpt), 4 Inte r - ce ll Cha nn el ISAC Bea m BS Bac kh au l Intra - ce ll Cha nn el use r Fig. 2. A cellular mmW ave network, where BSs are inter-connected via limited-bandwidth backhauls. The kinematic states of user k ℓ ∈ U ℓ include its distance d ℓ,k ℓ n − 1 , angle ψ ℓ,k ℓ n − 1 and velocity v ℓ,k ℓ n − 1 to its associated BS ℓ . which only takes first-order computations and greatly reduces the processing time. 4) By extensiv e simulations, we demonstrate that our pro- posed SD-USCB frame work significantly outperforms the per-cell scheme while greatly reducing overhead for CSI acquisition and cross-cell information exchange. More- ov er , the SALINR-based approximation deli vers distinct performance gains over the con ventional SLINR-based approach. Besides, our proposed DualOpt-based BF al- gorithm achiev es comparable performance to the SDR- based counterpart while reducing the computational time by approximately one order of magnitude for a large number of users. The remainder of the paper is structured as follows. Section II introduces the system model and problem formulation. In Section III, the proposed SD-USCB framew ork and its cor- responding algorithm design are illustrated. The construction of CKM from RSRP is detailed in Section IV. Section V ev aluates the proposed designs through extensi ve numerical simulations. Finally , Section VI draws the conclusions. I I . S Y S T E M M O D E L A N D P RO B L E M D E S C R I P T I O N A. System Model As sho wn in Fig. 2, we consider a cellular mmW ave network consisting of L cells. In each cell, a BS is deployed, and all the BSs coordinately serve the users in the network. Each BS transmits downlink (DL) ISA C signals to conv ey the data to users and receives the echoes to sense the states of users. In this work, the sensed information is utilized to assist the CSI acquisition to facilitate the coordination among the BSs. The details will be elaborated later . Denote the set of the BSs as L . Each BS is equipped with a uniform linear array (ULA) including N t transmit antennas and N r receiv e antennas, while each user is equipped with a single antenna. Denote the set of users associated with BS ℓ ∈ L as U ℓ , and k ℓ as the k -th user . For coordinated transmission, the BSs are connected with each other via backhauls (e.g., IP-RAN [33]) of limited bandwidth. Consider a transmission duration including N consecutive equal-length epochs and define E = { 1 , . . . , N } . The length of each epoch is ∆ T . The transmission delay T d of the backhaul satisfies T d < ∆ T . W e consider block-fading propagation environments, and assume the DL channel h ℓ,k ℓ n ∈ C N t from BS ℓ ∈ L to user k ℓ keeps almost unchanged within the n -th epoch, while varying across different epochs. Since the BS is usually mounted at a high tower and its associated users are usually not far away from it, the LoS propagation path is highly achie vable. Therefore, we assume that the LoS path exists in the intra- cell channels { h ℓ,k ℓ n } from each BS ℓ and its associated users k ℓ ∈ U ℓ . In contrast, due to the long distance between BS ℓ to the users associated with the other BSs m = ℓ , the LoS path is more likely to be blocked, thus we assume that the inter-cell channels { h m,k ℓ n } m = ℓ does not have a LoS path for simplicity . Denote P ℓ > 0 as the transmit po wer budget of BS ℓ ∈ L . The transmit signal for user k ℓ in the n -th epoch is s k ℓ n ( t ) ∈ C , with v k ℓ n ∈ C N t being its associated transmit BF . Besides, define the scheduling variable associated with user k ℓ in the n -th epoch as q k ℓ n ≜ 1 , user k ℓ is scheduled , 0 , otherwise . (1) Based on these definitions, the DL transmit signal of BS ℓ ∈ L in epoch- n can be written as s ℓ n ( t ) = X k ℓ ∈U ℓ q k ℓ n v k ℓ n s k ℓ n ( t ) . (2) Accordingly , the receiv ed signal of user k ℓ is y k ℓ n ( t ) = X m ∈L ( h m,k ℓ n ) H s ℓ n ( t ) + ω k ℓ n ( t ) , (3) where ω k ℓ n ( t ) ∼ C N (0 , σ 2 c ) is the additiv e white Gaussian noise (A WGN). Based on (3), the SINR of user k ℓ in the n -th epoch γ k ℓ c,n { q k ℓ n } , { v k ℓ n } ; { h ℓ,k ℓ n } can be expressed as (4) at the top of next page, and the corresponding DL rate is R k ℓ n { q k ℓ n } , { v k ℓ n } ; { h ℓ,k ℓ n } = log 2 1 + γ k ℓ c,n { q k ℓ n } , { v k ℓ n } ; { h ℓ,k ℓ n } . (5) B. Pr oblem Description In this work, we are interested in the D-USCB design via the coordination among the BSs to improv e the network throughput characterized by the PFR [34], which is one of the most popular performance metrics for the transmission ov er consecuti ve epochs in practice. W ith (5), the accumulati ve av erage rate of user k ℓ is e xpressed as ˆ R k ℓ N ≜ 1 N X N n ′ =1 R k ℓ n ′ { q k ℓ n ′ } , { v k ℓ n ′ } ; { h ℓ,k ℓ n ′ } , (6) and the netw ork PFR maximization problem can be formulated as max { q k ℓ n } , { v k ℓ n } X ℓ ∈L X k ℓ ∈U ℓ log ˆ R k ℓ N , (7a) s.t. q k ℓ n ∈ { 0 , 1 } , ∀ k ℓ ∈ U ℓ , ∀ ℓ ∈ L , ∀ n ∈ E , (7b) X k ℓ ∈U ℓ q k ℓ n ∥ v k ℓ n ∥ 2 ≤ P ℓ , ∀ ℓ ∈ L , ∀ n ∈ E . (7c) An common way to handle problem (7) is solving the follow- ing problem at each epoch n sequentially [35] max { q k ℓ n } , { v k ℓ n } X ℓ ∈L X k ℓ ∈U ℓ R k ℓ n { q k ℓ n } , { v k ℓ n } ; { h ℓ,k ℓ n } / ˆ R k ℓ n − 1 , (8a) s.t. q k ℓ n ∈ { 0 , 1 } , ∀ k ℓ ∈ U ℓ , ∀ ℓ ∈ L , (8b) X k ℓ ∈U ℓ q k ℓ n ∥ v k ℓ n ∥ 2 ≤ P ℓ , ∀ ℓ ∈ L , (8c) where ˆ R k ℓ n − 1 is the historical accumulativ e av erage rate and known in the n -th epoch. 5 γ k ℓ c,n { q k ℓ n } , { v k ℓ n } ; { h ℓ,k ℓ n } = q k ℓ n | ( h ℓ,k ℓ n ) H v k ℓ n | 2 X i ℓ = k ℓ q i ℓ n | ( h ℓ,k ℓ n ) H v i ℓ n | 2 | {z } intra-cell interference + X m = ℓ X j m ∈U m q j m n | ( h m,k ℓ n ) H v j m n | 2 | {z } inter-cell interference + σ 2 c (4) Problem (8) is dif ficult to solve, since it is non-con ve x and in volves continuous variables and integer variables that are coupled in both the objectiv e and constraints. More critically , the D-USCB optimization for (8) in practice faces great challenges, including 1) Inter-cell CSI acquisition . Problem (8) relies on the av ail- ability of the intra-cell CSI { h ℓ,k ℓ n } and the (incoming) inter-cell CSI { h m,k ℓ n } m = ℓ . As discussed in Sec. I, in the coordinated transmission mode of practical networks, BSs cannot obtain the CSI of non-serv ed users but only the measured RSRP . 2) High-dimension information exc hange . Even with av ail- able inter-cell CSI estimates { ˆ h m,k ℓ n } , BSs m = ℓ need to exchange them to BS ℓ for the optimization in the latter . Exchanging the estimates of high-dimensional channels will lead to a large o verhead in the backhaul. I I I . P RO P O S E D S D - U S C B F R A M E W O R K In this work, to ov ercome these challenges, we propose a nov el SD-USCB frame work by lev eraging the ISA C transmis- sion and CKM, as outlined in Fig. 1. The proposed SD-USCB framew ork consists of the following key components: i) the combination of CKMs and proactive sensing for inter-cell CSI acquisition, ii) an SALINR-based approximate formulation to enable distributed optimization with reduced information exchange through backhauls, iii) the end-to-end procedure of the SD-USCB framework, including the ISA C signal trans- mission, the user scheduling, the user location exchange, and the ISAC BF , and iv) the detailed algorithm design for the user scheduling and the ISA C BF . The details of our proposed designs are elaborated as follows. A. CSI acquisition by CKM and pr oactive sensing T o resolv e the inter-cell CSI acquisition challenge, we pro- pose inte grating the CKM and the proacti ve sensing. Specifi- cally , each BS in the network is assumed to be equipped with a site-specific CKM, which can be constructed of fline in adv ance through network measurement [8, 36]. The CKM establishes the one-to-one mappings from user locations in the respective cov erage area of each BS to their CSI estimates. While CKMs with dif ferent types of CSI estimates have been dev eloped, like the beam index map for hybrid BF [36] and the clutter angle map for clutter suppression [32], they are for specific applications different from the D-USCB we consider here and thus can not be applied directly . In this work, the CKMs for the SD-USCB provide statistical CSI estimates { ˆ h m,k ℓ n } m = ℓ reflecting the large-scale propagation characteristics, which are extracted from the RSRP measurements by LSCM techniques [9]. Details are illustrated in Sec. IV. W ith the constructed CKMs, the BS still needs to know the user locations to query their respecti ve inter-cell CSI estimates. In the proposed SD-USCB, the locations are obtained by BSs via proacti ve sensing and exchanged to inform neighboring BSs. That is, each BS sends ISA C signals for simultaneous data communication and sensing. For the inter-cell channels { h m,k ℓ n } m = ℓ , the LoS path may not exist from the BS m to the user k ℓ associated with another BS ℓ . Therefore, the location of user k ℓ is sensed by its associated BS ℓ rather than BS m . T o attain { ˆ h m,k ℓ n } m = ℓ , the location sensed by BS ℓ will be shared with BS m via the backhaul linking them. Then, BS m inputs this location into its CKM to obtain the CSI estimate. B. SALINR to alleviate variable coupling and reduce the information e xchange across BSs While the inter-cell CSI estimates can be effecti vely ac- quired by constructing CKMs and proacti ve sensing, the D- USCB for (8) is still challenging due to the variable coupling across different BSs in the objectiv e (8a). Specifically , the ICI term P m = ℓ P j m ∈U m q j m n | ( h m,k ℓ n ) H v j m n | 2 ≜ I k ℓ n in the SINR expression of R k ℓ n ( · ) is dependent on the scheduling variables { q j m n } and the BF v ariables { v j m n } of the other BSs m = ℓ . While con ventional approaches [37, 38] based on primal/dual decomposition and ADMM enable distributed optimization, they require iterativ e updates and exchange of intermediate variables due to the coupling nature of problem (8). Consequently , their overhead through the backhaul is substantial. T o resolv e it, we choose a dif ferent way by intro- ducing a surrogate term, which can decompose the problem while a voiding iterati ve information exchange across BSs. As a surrogate, the introduced term should reflect the inter - cell interference le vel and not deviate too much from the true I k ℓ n . In the existing literature [39–41], leakage-based metrics hav e been widely used to approximate inter-cell in- terference. The latter reflects cross-cell interference from the user’ s perspectiv e, while the former captures it from the BS’ s perspectiv e. More importantly , the former has the merit of alleviating the variable coupling in the transmitter design. Specifically , conv entional SLINR [42] approximates I k ℓ n by a leakage term defined as ˆ L k ℓ n = X m = ℓ X t m ∈U m q t m n ( h ℓ,t m n ) v k ℓ n 2 , (9) which can achiev e a surrogate problem with fully decoupled BF v ariables across dif ferent BSs. In this work, instead of applying SLINR, we introduce the av eraged leakage from BS ℓ to the users in the other BSs to achiev e a more accurate surrogate of I k ℓ n , which is defined as the arithmetic mean of the interference power generated by BS ℓ to the scheduled users in the other BSs [10], i.e., ˜ L ℓ n = X j ℓ ∈U ℓ X m = ℓ X t m ∈U m q j ℓ n q t m n | ( h ℓ,t m n ) H v j ℓ n | 2 / X j ℓ ∈U ℓ q j ℓ n , = X j ℓ ∈U ℓ ( q j ℓ n ˆ L j ℓ n ) / X j ℓ ∈U ℓ q j ℓ n . (10) By replacing I k ℓ n in (4) with ˜ L ℓ n , the SALINR, as an approx- imation of the original SINR, can be attained as 6 ˜ γ k ℓ n = q k ℓ n | ( h ℓ,k ℓ n ) H v k ℓ n | 2 P i ℓ = k ℓ q i ℓ n | ( h ℓ,k ℓ n ) H v i ℓ n | 2 + ˜ L ℓ n + σ 2 c . (11) The main difference of ˜ L ℓ n from the con ventional leakage term ˆ L ℓ n [18] is the additional arithmetic mean operation over all the users j ℓ ∈ U ℓ , thereby the optimization will consider the av eraged leakage rather than the specific leakage. T o analyze the effecti veness of the SALINR-based approx- imation, denote the user rate as a function over the ICI as R k ℓ n ( I k ℓ n ) = log 1 + S k ℓ n / ( T k ℓ n + I k ℓ n + σ 2 c ) , where S k ℓ n and T k ℓ n correspond to the power of the recei ved signal and the intra-cell interference, respecti vely . Accordingly , for the approximation errors between the true user rate R k ℓ n ( I k ℓ n ) and the SLINR-based surrogate rate R k ℓ n ( ˜ L k ℓ n ) , as well as between R k ℓ n ( I k ℓ n ) and the SALINR-based surrogate rate R k ℓ n ( ˆ L k ℓ n ) , the following theorem holds. Theorem 1 F or any given set of beamformers { v k ℓ n } k ℓ ∈S ℓ with ∥ v k ℓ n ∥ = P , ∀ k ℓ ∈ S ℓ , ℓ ∈ L , under independent Rayleigh fading c hannels { h k ℓ n } , it holds that E { h k ℓ n } h R k ℓ n ( ˜ L k ℓ n ) − R k ℓ n ( I k ℓ n ) i ≤ P ¯ Z k ℓ n √ 2 M ℓ , E { h k ℓ n } h R k ℓ n ( ˆ L k ℓ n ) − R k ℓ n ( I k ℓ n ) i ≤ P ¯ Z k ℓ n s M ℓ 1 + 1 |S ℓ n | , wher e ¯ Z k ℓ n > 0 is a parameter dependent on the Lipchitz constant of R k ℓ n ( I k ℓ n ) , M ℓ = P m = ℓ P t m ∈U m q t m n , and S ℓ n is the set of scheduled users in cell ℓ with |S ℓ n | = P j ℓ ∈U ℓ q j ℓ n . Proof 1 The pr oof is detailed in Appendix A. Theorem 1 indicates that SALINR-based rate approximation achiev es a smaller error bound as long as multiple users are scheduled. Moreov er , its bound decreases with an increased number of scheduled users. Therefore, SALINR can provide a more accurate approximation of the original SINR. It is indeed found that this SALINR-based optimization can attain a remarkable performance improvement compared with its SLINR-based counterpart, as sho wn in Sec. V -E. Based on SALINR, a surrogate rate function of R k ℓ n ( · ) can be obtained as ˜ R k ℓ n ≜ log(1 + ˜ γ k ℓ n ) , and problem (8) in each epoch n is updated to max { v k ℓ n ,q k ℓ n } X ℓ ∈L X k ℓ ∈U ℓ ˜ R k ℓ n / ˆ R k ℓ n − 1 , (13a) s.t. (8b) , (8c) . (13b) Compared with (8), the BF variables { v k ℓ n } from different BSs are successfully decoupled. While the scheduling v ariables are still coupled across BSs, they will be further handled by separating the user scheduling and BF optimizations into two stages [2]. Additionally , as the inter -cell CSI required by each BS ℓ shifts from the incoming CSI in (4) to the outgoing CSI in (10), cross-BS information exchange is simplified from “BS ℓ sensed locations of users k ℓ − − − − − − − − − − − − − − − → BS m { ˆ h m,k ℓ n } queried from CKM − − − − − − − − − − − − − − − − → BS ℓ ” to “BS m sensed locations of users t m − − − − − − − − − − − − − − − → BS ℓ (to query { ˆ h ℓ,t m n } )”. The latter no longer needs to e xchange high-dimensional inter -cell CSI estimates over the backhaul, significantly reducing the ov erhead. ( n − 1 ) ∆ 𝑇 𝑛 ∆ 𝑇 𝑛 ∆ 𝑇 − 𝑇 𝑑 𝑡 ISA C signal tra nsm ission & sensing Exc hangi ng loc at ions via bac khaul s • Qu ery CKM with u ser lo catio n s to ob tain in ter - cell CSI. • Op tim ize ISAC BF f o r ep o ch 𝑛 . • Determ in e u ser sch ed u lin g set f o r ep o ch 𝑛 +1 . • Co m p u te u ser lo cation s f rom sen sed states . • Query CKM w ith u ser lo cation s to ob tain in ter - cell CSI. • Op ti m i ze ISAC BF f o r ep o ch 𝑛 +1 . Epoc h 𝑛 … … … … • Determ in e u ser sch ed u lin g set f o r ep o ch 𝑛 . • Co m p u te u ser lo cation s f rom sen sed states . Fig. 3. The operations of BS ℓ in the proposed SD-USCB framework. C. Pr oposed SD-USCB pr ocedur e After resolving the challenges of the inter-cell CSI acqui- sition and the information exchange, we further elaborate on the k ey steps of the SD-USCB frame work in each epoch. Specifically , in e very epoch, each BS ℓ sends beamformed ISA C signals to deliver information data to its scheduled users and sense their kinematic parameters, including the distance d ℓ,k ℓ n , the angle θ ℓ,k ℓ n and the velocity v ℓ,k ℓ n . With these sensed parameters, the location of user k ℓ can be estimated based on the geometric relation and further exchanged with neighboring BSs through the backhaul. The BSs then query their respective CKMs with the shared locations to obtain the (outgoing) inter-cell CSI, which is further used for the subsequent user scheduling and BF optimization. For ease of illustration, let us take the operations at BS ℓ in the n -th epoch within [( n − 1)∆ T , n ∆ T ] as an example. As shown in Fig. 3, the framework consists of four stages. • Stage I : ISAC Signal T ransmission and Sensing . At the beginning of the n -th epoch, t = ( n − 1)∆ T , BS ℓ sends the beamformed signals P k ℓ ∈U ℓ v k ℓ n s k ℓ n ( t ) . From the receiv ed echoes, BS ℓ acquires the estimates of the kinematic parameters { ˆ θ ℓ,k ℓ n , ˆ d ℓ,k ℓ n , ˆ v k ℓ n } of served users. • Stage II : P er-cell User Scheduling . At t = ( n ∆ T − T d ) , BS ℓ collects { ˆ R k ℓ n − 1 } k ℓ ∈U ℓ as the PFR weights of (13a). W ith { ˆ R k ℓ n − 1 } k ℓ ∈U ℓ and the intra-cell CSI { ˆ h ℓ,k ℓ n } k ℓ ∈U ℓ , a user scheduling algorithm is conducted at BS ℓ to determine the scheduled user set S ℓ n for epoch n . • Stage III : Information Exc hange . Based on S ℓ n , each BS ℓ computes the locations { ( ˆ x k ℓ n , ˆ y k ℓ n ) } k ℓ ∈S ℓ n from the sensed kinematic parameters and then exchanges them with other BSs m = ℓ . Meanwhile, BS ℓ recei ves { ( ˆ x t m n , ˆ y t m n ) } t m ∈S m n and inquire its CKM to attain the inter-cell CSI { ˆ h ℓ,t m n } t m ∈S m n . • Stage IV : Distributed ISAC BF . At t = n ∆ T , with av ailable intra-cell CSI { ˆ h ℓ,k ℓ n } k ℓ ∈S ℓ n and inter-cell CSI { ˆ h ℓ,t m n } t m ∈S m n , each BS ℓ solves an SALINR-based PFR maximization problem to optimize the transmit ISAC BF { v k ℓ n } , which is applied to users in S ℓ n for epoch ( n + 1) . D. Scheduling and BF Algorithm Design In this subsection, we illustrate the detailed designs for the four stages. ISA C Signal T ransmission and Sensing : Denote κ = √ N t N r as the gain of the antenna array and z ℓ n − 1 ( t ) ∈ C N r as the circularly symmetric complex Gaussian noise subject 7 to z ℓ n − 1 ( t ) ∼ C N ( 0 , σ 2 I N r ) . At an angle θ and with half- wa velength antenna spacing, the transmit steering vector and the recei ve steering vector are defined as a ( θ ) = 1 √ N t [1 , e j π sin ( θ ) ,. . . ,e j π ( N t − 1) sin ( θ ) ] T ∈ C N t , (14a) b ( θ ) = 1 √ N r [1 , e j π sin ( θ ) ,. . . ,e j π ( N r − 1) sin ( θ ) ] T ∈ C N r , (14b) respectiv ely . Since the refraction power of the echo signals from other BSs is small, the y are ignored for BS ℓ . Like [27, 28], in the ( n − 1) -th epoch, the echoed ISAC signals received at BS ℓ can be expressed as y ℓ e ,n − 1 ( t ) = X m ∈L X j m ∈U m κβ ℓ,j m n − 1 e j 2 πµ ℓ,j m n − 1 t b ( θ ℓ,j m n − 1 ) × a H ( θ ℓ,j m n − 1 ) s ℓ n − 1 ( t − τ ℓ,j m n − 1 ) + z ℓ n − 1 ( t ) , where { β ℓ,j m n − 1 , µ ℓ,j m n − 1 , τ ℓ,j m n − 1 } are the reflection coef ficient, the Doppler frequency shift and the round-trip delay of the sensing channel between BS ℓ and user j m , respectiv ely . Define the distance, angle, and velocity of user k ℓ to BS ℓ in epoch ( n − 1) as d ℓ,k ℓ n − 1 , ψ ℓ,k ℓ n − 1 and v ℓ,k ℓ n − 1 , respecti vely . According to the standard monostatic radar model [27], the sensing parameters { β ℓ,k ℓ n − 1 , µ ℓ,k ℓ n − 1 , τ ℓ,k ℓ n − 1 } are deterministic functions of the kinematic parameters { d ℓ,k ℓ n − 1 , ψ ℓ,k ℓ n − 1 , v ℓ,k ℓ n − 1 } . At BS ℓ , the recei ve BF f k ℓ n − 1 ≜ b ( ˆ θ ℓ,k ℓ n − 2 ) is applied to enhance the echoes from user k ℓ , where ˆ θ ℓ,k ℓ n − 2 is the angle sensed in epoch ( n − 2) . Because the angular variation within a tiny interval across two consecuti ve epochs is small, with a large N r it holds that | b H ( ˆ θ ℓ,k ℓ n − 2 ) b ( θ ℓ,k ℓ n − 1 ) | ≈ 1 , and | b H ( ˆ θ ℓ,k ℓ n − 2 ) b ( θ ℓ,k ′ ℓ n − 1 ) | = 0 when k ′ ℓ = k ℓ . Therefore, after receiving BF , the recei ved echoed signal for user k ℓ can be written as r ℓ,k ℓ e ,n − 1 ( t ) = ( f k ℓ n − 1 ) H y ℓ e ,n − 1 ( t ) , (15) ≈ κβ ℓ,k ℓ n − 1 e j 2 πµ ℓ,k ℓ n − 1 t a H ( θ ℓ,k ℓ n − 1 ) s ℓ n − 1 ( t − τ ℓ,k ℓ n − 1 ) + z ℓ,k ℓ n − 1 ( t ) , where z ℓ,k ℓ n − 1 ( t ) ∼ C N (0 , σ 2 z ) . Based on r ℓ,k ℓ e ,n − 1 ( t ) , BS ℓ can adopt the matched filtering to estimate the delay τ ℓ,k ℓ n − 1 and the Doppler frequency shift µ ℓ,k ℓ n − 1 , then the angle θ ℓ,k ℓ n − 1 can be attained by maximum-likelihood estimation. The resulting measurements are modeled by additi ve errors z ℓ,k ℓ ,i n − 1 , i ∈ { τ , µ, θ } , are assumed to be zero-mean complex Gaussian random variables, i.e., z ℓ,k ℓ ,i n − 1 ∼ C N (0 , σ 2 k ℓ ,i ) , where the variance σ 2 k ℓ ,i is in versely proportional to the sensing SINR of user k ℓ [27, 28], and can be explicitly expressed as σ 2 k ℓ ,i = a 2 i ( P j ℓ = k ℓ Gκ 2 q j ℓ n − 1 | β ℓ,k ℓ n − 1 | 2 | a H ( θ ℓ,k ℓ n − 1 ) v j ℓ n − 1 | 2 + σ 2 z ) Gκ 2 | β ℓ,k ℓ n − 1 | 2 | a H ( θ ℓ,k ℓ n − 1 ) v k ℓ n − 1 | 2 , (16) where G is the matched-filtering gain, and the parameters a i , i ∈ { τ , µ, θ } are determined according to the system configuration and specific parameter estimation algorithms. Per -cell Scheduling : Notice that the scheduling variables { q k ℓ n } and the BF variables { v k ℓ n } are still coupled in problem (13). Moreover , only the intra-cell CSI { h ℓ,k ℓ n } is av ailable at each BS ℓ , while the scheduling of other cells { q j m n | q j m n = 1 } m ∈L ,m = ℓ and the inter -cell CSI { ˆ h ℓ,j m n } m = ℓ remain unkno wn, making the joint scheduling among the BSs difficult. Therefore, we first address the intra-cell interference by per -cell user scheduling, leaving the ICI alle viation to the Algorithm 1 PFZFG User Scheduling Algorithm. 1: Given K s , S ℓ n = ∅ ; 2: Initialize S ℓ n ← K s , and compute the set of the remaining users set by ¯ S ℓ n = U ℓ \S ℓ n ; 3: Compute R ′ = P i ∈K s R i n based on ZF-BF with equal power . 4: while T rue do 5: Compute π j = arg max k ∈ ¯ S ℓ n P i ∈S ℓ,k n R i n / ˆ R i n − 1 , where S ℓ,k n ← S ℓ n ∪ k, ∀ k ∈ ¯ S ℓ n ; 6: Compute R = P i ∈S ℓ,π j n R i n / ˆ R i n − 1 ; 7: if R ≥ R ′ then 8: Update S ℓ n ← S ℓ n ∪ π j , and ¯ S ℓ n ← ¯ S ℓ n \ π j ; 9: Update R ′ ← R , and j ← j + 1 ; 10: else 11: Break; 12: end if 13: end while 14: Output the set of the scheduled users S ℓ n . subsequent ISA C BF stage. Each BS performs scheduling greedily using only { ˆ h ℓ,k ℓ n } to maximize the PFR. The scheduling design prioritizes two criteria: i) users not scheduled for a long time (e.g., in the previous T s epochs) should be immediately scheduled to enhance the PFR; ii) spatially separated users with weak channel correlation are fa vored. This mitigates the intra-cell interference in (4) in the DL transmission while alleviating the beam overlap, thereby enhancing the sensing in (16). Follo wing these ideas, we initialize the scheduling set S ℓ n with users K s = { π 1 , . . . , π j − 1 } unscheduled for the past T s − 1 epochs. Let ¯ S ℓ n = U ℓ \S ℓ n contain the remaining unscheduled users. W e then iterativ ely e xpand S ℓ n : each user in ¯ S ℓ n is tentativ ely added, and ZF BF with equal power allocation is applied to the expanded set to compute the PFR. The user whose addition yields the highest PFR is permanently added to S ℓ n . This process is repeated until the PFR can no longer be improv ed by adding any unscheduled user . Obviously , the users are selected in a greedy manner according to the PFR metric. The full procedure of the proposed PFZFG scheduling at BS ℓ in the n -th epoch is outlined in Algorithm 1. Information Exchange : After determining S ℓ n , each BS ℓ ∈ L will compute the locations { ( ˆ x k ℓ n , ˆ y k ℓ n ) } k ℓ ∈S ℓ n from the sensed kinematic parameters based on the geometric relation [27]. BS ℓ then forwards the locations { ( ˆ x k ℓ n , ˆ y k ℓ n ) } k ℓ ∈S ℓ n to the other BSs m = ℓ and receiv es their scheduled users’ locations. W ith the recei ved locations, BS ℓ queries its pre-constructed CKM to attain the inter-cell CSI estimates { ˆ h ℓ,j m n } j m ∈S m n . Distributed ISA C BF : Giv en the scheduling set S ℓ n and the inter -cell CSI { ˆ h ℓ,j m n } j m ∈S m n , v ariable coupling across BSs in (13) is eliminated, allo wing each BS to optimize its beamformers independently . The beamformer must serve both communication and proacti ve sensing, where sensing performance affects future CSI acquisition and BF design. Therefore, (13) should account for sensing quality . T o this end, we constrain the v ariance of the proacti ve sensing errors to stay below a threshold ¯ c . At each BS ℓ , the beamformers are then optimized by solving the following virtual PFR maximization problem, subject to the transmit po wer constraint and sensing 8 error constraints max { v k ℓ n } X k ℓ ∈S ℓ n ˜ R k ℓ n / ˆ R k ℓ n − 1 , (17a) s.t. X k ℓ ∈S ℓ n ∥ v k ℓ n ∥ 2 ≤ P ℓ , (17b) σ 2 k ℓ ,i ( { v k ℓ n } ) ≤ ¯ c, i ∈ { τ , µ, θ } , k ℓ ∈ S ℓ n . (17c) Because of the objective function (17a) and the sensing constraints (17c), problem (17) is non-con ve x. T o solve it, we first cope with the non-con ve xity of (17a) by FP techniques [12]. Introducing auxiliary v ariables { ξ k ℓ n } and leveraging the Lagrangian dual transform [43], (17a) is equi valent to max { v k ℓ n , } , { ξ k ℓ n } X k ℓ ∈S ℓ n ˜ R k ℓ n / ˆ R k ℓ n − 1 − ξ k ℓ n / ˆ R k ℓ n − 1 + X k ℓ ∈S ℓ n (1 + ξ k ℓ n ) / ˆ R k ℓ n − 1 ℜ (( ˆ h ℓ,k ℓ n ) H v k ℓ n ) P s ℓ ∈S ℓ n | ( ˆ h ℓ,k ℓ n ) H v s ℓ n | 2 + L ℓ n + σ 2 c . (18) W ith fixed { v k ℓ n } , the optimal values of { ξ k ℓ n } can be attained based on the first-optimal condition in a closed-form as ( ξ k ℓ n ) ∗ = ˜ γ k ℓ n , ∀ k ℓ ∈ S ℓ n . (19) Giv en { ξ k ℓ n } , the objectiv e function in (18) is still a sum- of-ratio form. T o handle it, by further introducing auxiliary variables { ζ k ℓ n } , (18) is equi v alent to max { v k ℓ n } , { ξ k ℓ n } , { ζ k ℓ n } X k ℓ ∈S ℓ n f k ℓ ( { v k ℓ n } , { ξ k ℓ n } , { ζ k ℓ n } ) , (20) where f k ℓ ( { v k ℓ n } , { ξ k ℓ n } , { ζ k ℓ n } ) = X k ℓ ∈S ℓ n 2 ζ k ℓ n q (1 + ξ k ℓ n ) / ˆ R k ℓ n − 1 ℜ (( h ℓ,k ℓ n ) H v k ℓ n ) − ( ζ k ℓ n ) 2 X s ℓ ∈S ℓ n | ( ˆ h ℓ,k ℓ n ) H v s ℓ n | 2 + L ℓ n + σ 2 c . (21) W ith fixed { v k ℓ n , ξ k ℓ n } , { ζ k ℓ n } admit closed-form solutions ( ζ k ℓ n ) ∗ = q (1 + ˜ γ k ℓ n ) | ( ˆ h ℓ,k ℓ n ) H v k ℓ n | 2 / ˆ R k ℓ n − 1 P j ℓ ∈S ℓ n | ( ˆ h ℓ,k ℓ n ) H v j ℓ n | 2 + L ℓ n + σ 2 c . (22) In addition, denote ¯ i = argmax i a i , the sensing constraints (17c) are equiv alent to ϕ k ℓ ( { v j ℓ n } ) ≤ ψ ¯ i k ℓ ( v k ℓ n ) , ∀ k ℓ , j ℓ (23) where ϕ k ℓ ( { v j ℓ n } ) ≜ P j ℓ ∈S ℓ n ,j ℓ = k ℓ Gκ 2 | ˆ β ℓ,k ℓ n | 2 | a H ( ˆ θ ℓ,k ℓ n ) v j ℓ n | 2 + σ 2 z , ψ ¯ i k ℓ ( v k ℓ n ) ≜ ¯ cGκ 2 | ˆ β ℓ,k ℓ n | 2 /a 2 i | a H ( ˆ θ ℓ,k ℓ n ) v k ℓ n | 2 , and ˆ β ℓ,k ℓ n = η k ℓ / ( ˆ τ ℓ,k ℓ n c ) . Based on (20) and (23), problem (17) is transformed into max { v k ℓ n } , { ξ k ℓ n } , { ζ k ℓ n } X k ℓ ∈S ℓ n f k ℓ ( { v k ℓ n } , { ξ k ℓ n } , { ζ k ℓ n } ) , (24a) s.t. (17b) , (23) , (24b) which can be solved by updating the three types of variables sequentially in a block coordinate descent (BCD) manner . Howe ver , when fixing { ξ k ℓ n } and { ζ k ℓ n } , the non-con ve x sensing constraints (23) render the subproblem w .r .t. { v k ℓ n } difficult to solve. A possible approach [1] is to apply SDR, which conv erts the subproblem into a con ve x semidefinite program (SDP), but at the cost of high-dimensional matrix variables and increased complexity . T o improve efficiency , we instead solv e (24) directly o ver the BF vector v ariables. First, the sensing constraints are con vexified by SCA. Given a fixed beamformer v k ℓ , ( r ) n with r being the iteration index, a lower bound of ψ ¯ i k ℓ ( v k ℓ n ) in (23) can be obtained via the first-order T aylor e xpansion as ˜ ψ ¯ i k ℓ ( v k ℓ n | v k ℓ , ( r ) n ) = 2 ℜ{ ( v k ℓ , ( r ) n ) H C k ℓ n v k ℓ n } − ( v k ℓ , ( r ) n ) H C k ℓ n v k ℓ , ( r ) n , (25) where C k ℓ n = ¯ cGκ 2 | ˆ β ℓ,k ℓ n | 2 a ( ˆ θ ℓ,k ℓ n ) a H ( ˆ θ ℓ,k ℓ n ) /a 2 i . By replacing ψ ¯ i k ℓ ( v k ℓ n ) with ˜ ψ ¯ i k ℓ ( v k ℓ n | v k ℓ , ( r ) n ) , the subproblem of (24) w .r .t. { v k ℓ n } is approximated as the follo wing con vex problem max { v k ℓ n } X k ℓ ∈S ℓ n f k ℓ ( { v k ℓ n } ; { ξ k ℓ n } , { ζ k ℓ n } ) , (26a) s.t. X k ℓ ∈S ℓ n ∥ v k ℓ n ∥ 2 ≤ P ℓ , (26b) ϕ k ℓ ( { v j ℓ n } ) ≤ ˜ ψ ¯ i k ℓ ( v k ℓ n | v k ℓ , ( r ) n ) , ∀ k ℓ ∈ S ℓ n . (26c) While (26) can be solv ed by off-the-shelf solvers lik e CVX, a computation-efficient algorithm is more appealing for practical deployment. Therefore, we further dev elop a DualOpt-based first-order algorithm. Specifically , introducing dual variables λ ≥ 0 for the power constraint (26b) and { µ k ℓ ≥ 0 } for the sensing constraints (26c), the Lagrangian of (26) is gi ven by L ( { v k ℓ n } , λ, { µ k ℓ } ) = − λ X k ℓ ∈S ℓ n ∥ v k ℓ n ∥ 2 + λP ℓ + X k ℓ ∈S ℓ n 2 ℜ{ ( z k ℓ n ) H v k ℓ n } − ( v k ℓ n ) H A k ℓ n v k ℓ n , (27) where z k ℓ n ≜ ζ k ℓ n q 1 + ξ k ℓ n / ˆ R k ℓ n − 1 ˆ h ℓ,k ℓ n + µ k ℓ C k ℓ n v k ℓ , ( r ) n , A k ℓ n ≜ P j ℓ ∈S ℓ n ( ζ j ℓ n ) 2 ˆ h ℓ,j ℓ n ( ˆ h ℓ,j ℓ n ) H + ( P j ℓ ∈S ℓ n ( ζ j ℓ n ) 2 ) D ℓ n + µ k ℓ C k ℓ n , and D ℓ n denotes the leakage cov ariance matrix D ℓ n = X m = ℓ X t m ∈U m q t m n ˆ h ℓ,t m n ( ˆ h ℓ,t m n ) H X j ℓ ∈U ℓ q j ℓ n . (28) By setting ∇ v k ℓ n L ( · ) = 0 , the optimal beamformer admits the following semi-closed-form e xpression v k ℓ , ( r,s +1) n = ( A k ℓ n + λ ( r,s ) I ) − 1 z k ℓ n , ∀ k ℓ ∈ S ℓ n . (29) Substituting (29) into (27), the dual problem of (26) is min λ, { µ k ℓ } g ( λ, { µ k ℓ } ) (30a) s.t. λ ≥ 0 , µ k ℓ ≥ 0 , ∀ k ℓ ∈ S ℓ n (30b) with g ( λ, { µ k ℓ } ) = P k ℓ ∈S ℓ n ( z k ℓ n ) H A k ℓ n + λ I − 1 z k ℓ n + λP ℓ . Now (30) is a con vex problem with simple linear inequal- ities, so it can be efficiently solved by projected gradient descent (PGD) method. Specifically , in each dual iteration ( s + 1) , the dual v ariables can be updated as λ ( r,s +1) = h λ ( r,s ) − α λ P ℓ − X k ℓ ∈S ℓ n ∥ v k ℓ n ∥ 2 i + , (31a) µ ( r,s +1) k ℓ = h µ ( r,s ) k ℓ − α µ ˜ ψ ¯ i k ℓ ( v k ℓ n | v k ℓ , ( r,s ) n ) − ϕ k ℓ ( { v j ℓ n } ) i + , (31b) where α λ and α µ are non-negati ve step sizes, and [ · ] + denotes the projection onto the nonnegati ve orthant. After solving problem (30) by the dual updates in (31), the reference points of SCA and FP intermediate variables can be updated in an outer loop. Accordingly , the proposed DualOpt-Based ISA C BF for (17) is summarized in Algorithm 2. It is worth noting that the main computations of Algorithm 2 arise from updating the BFs in (29), which requires computing ( A k ℓ n + λ I ) − 1 of O ( N 3 t ) complexity . In practice, this could become prohibiti ve for a lar ge number of transmit antennas. Interestingly , observing that A k ℓ n = e A n + µ k ℓ C k ℓ n with e A n ≜ P j ℓ ∈S ℓ n ( ζ j ℓ n ) 2 ˆ h ℓ,j ℓ n ( ˆ h ℓ,j ℓ n ) H + ( P j ℓ ∈S ℓ n ( ζ j ℓ n ) 2 ) D ℓ n that is 9 Algorithm 2 Proposed DualOpt-Based ISA C BF Algorithm for Problem (17) 1: Initialization: Initialize beamformers { v k ℓ , (0) n } , dual vari- ables λ (0) and { µ (0) k ℓ } , step sizes { α λ , α µ k ℓ } , and set outer iteration inde x r = 0 . 2: repeat 3: (FP update) Update auxiliary v ariables { ξ k ℓ , ( r ) n } via (19) and { ζ k ℓ , ( r ) n } via (21). 4: Initialize inner iteration index s = 0 and v k ℓ , ( r, 0) n = v k ℓ , ( r ) n . 5: r epeat 6: Compute { v k ℓ , ( r,s ) n } by (29). 7: Update { µ ( r,s ) k ℓ } and λ ( r,s ) by (31). 8: s ← s + 1 . 9: until dual updates con ver ge. 10: Set v k ℓ , ( r +1) n = v k ℓ , ( r,s ) n , λ ( r +1) = λ ( r,s ) , { µ ( r +1) k ℓ } = { µ ( r,s ) k ℓ } . 11: r ← r + 1 . 12: until outer FP iteration conv erges. 13: Output: Optimized beamformers { v k ℓ , ( r ) n } . unchanged during the dual updates and C k ℓ n being a rank- one matrix, the computation of ( A k ℓ n + λ I ) − 1 can be greatly simplified by exploiting the W oodb ury matrix identity , i.e., ( e A n + λ I + µ k ℓ C k ℓ n ) − 1 = ( e A n + λ I ) − 1 − µ k ℓ ( e A n + λ I ) − 1 a ( ˆ θ ℓ,k ℓ n ) a H ( ˆ θ ℓ,k ℓ n )( e A n + λ I ) − 1 1 + µ k ℓ a H ( ˆ θ ℓ,k ℓ n )( e A n + λ I ) − 1 a ( ˆ θ ℓ,k ℓ n ) . (32) Remark 1 In each dual iter ation, ( e A n + λ ( r,s ) I ) − 1 is com- puted only once and applied to all sc heduled users. Ther efor e, (32) r educes the per-user computational comple xity of the BF update fr om O ( N 3 t ) in (29) to O ( N 2 t ) , significantly impr oving the scalability of the pr oposed algorithm. I V . C K M C O N S T RU C T I O N B Y L S C M In this section, we briefly introduce the CKM construc- tion. First, each BS collects RSRP measurements tagged with user locations, which can be obtained through offline campaigns such as dedicated dri ve tests, and continuously updated with fresh online user feedback to adapt to en viron- mental dynamics 3 . Using RSRP measurements, propagation path characteristics such as the APS are e xtracted to construct the CSI estimate. The BS stores the CSI estimates with the corresponding user locations, thereby establishing a CKM that provides location-to-CSI mapping. Specifically , LSCM techniques [9] are le veraged to e xtract the APS statistics from RSRP data. Because this process is identical across all BSs, the indices of BSs and users ℓ, j m will be omitted hereafter . As illustrated in Fig. 4, the cov erage area A of a BS is divided into grids i g = 1 , . . . , N g , each corresponding to a potential user location. The DL angular spread [ θ min , θ max ] is discretized uniformly into N θ 3 The BS does not need to collect measurements from all possible user locations, which is not practical. Instead, e xploiting spatial consistenc y of local wireless channels [8], the estimates of the channel parameters for locations without measurements can be inferred by interpolation or extrapolation. RSRP CKM Use r lo cation at gr id Grid Use r lo cation fro m pr oactiv e sensing Data collectio n CSI q uery Ex chang e th ro ug h backh aul CKM constructio n CKM util iz at io n Chan nel paths RSRP + location m ea surem ents APS extr act io n Fig. 4. Illustration of the CKM construction at the left BS, whose coverage area is di vided into grids. The shado wed circle represents the area where users are typically associated with the BS centered at the area. In the CKM utilization, the left BS queries its CKM with the user locations exchanged from the neighboring (right) BS to obtain the inter-cell CSI estimates. bins: Θ ≜ { θ 1 , . . . , θ i a , . . . , θ N θ } with θ i a = θ min + ( i a − 0 . 5) θ max − θ min N θ , i a = 1 , . . . , N θ . W ith the transmit steering vector a ( θ i a ) ∈ C N t defined in (14a), the DL channel from the BS to a user at the i g -th grid is modeled as h i g ( t ) = X N θ i a =1 α i g ,i a ( t ) a ( θ i a ) , (33) where α i g ,i a ( t ) is the comple x gain of the path corresponding to the i a -th angular bin at time t . Assume that the APS is stationary o ver T successiv e epochs, the expected APS of the i a -th angular bin at grid i g ov er these epochs is ¯ α i g ,i a = E ( | α i g ,i a ( t ) | 2 ) , i g = 1 , . . . , N g . Stacking these yields the expected channel APS vector ¯ α i g = [ ¯ α i g , 1 , . . . , ¯ α i g ,N θ ] ⊤ ∈ R N θ . In practice, each BS regularly sends directional reference signal beams to the user for the RSRP measurement. Let the predefined transmit precoding matrix, including N b beams, be W ≜ 1 √ N t [ w 1 , . . . , w N b ] ∈ C N t × N b , where w b ∈ C N t is the codew ord associated with the b -th beam. For the b -th beam, the RSRP measured at grid i g is r i g ,b ( t ) = P T | w H b h i g ( t ) | 2 / √ N t . Collectiv ely , the overall RSRP measurements are r i g ( t ) = [ r i g , 1 , . . . , r i g ,N b ] ⊤ = P T | W H h i g ( t ) | 2 ∈ R N b , (34) where | · | is element-wise modulus. Due to the limited scattering ef fect of mmW a ve propagation, most of the ener gy from the multi-path signals is concentrated within a limited number of angular bins. Accordingly , the number of effecti ve paths N p ≪ N θ , and ¯ α i g is a sparse vector . Therefore, giv en the measurements ¯ r i g fed back from the user , the BS can extract the expected APS ¯ α i g by solving the follo wing sparse reco very problem [9] ˆ ¯ α i g = arg min ¯ α i g ⪰ 0 ∥ ¯ r i g − P T ( | A H W | 2 ) T ¯ α i g ∥ 2 , (35a) s.t. ∥ ¯ α i g ∥ 0 ≤ N p , (35b) where A = [ a ( θ 1 ) , . . . , a ( θ i a ) , . . . , a ( θ N θ )] ∈ C N t × N θ . W ith ˆ ¯ α i g , the channel estimate for grid i g is reconstructed as 4 4 Compared with (33), ˆ h i g recovers the amplitude of the expected complex gain of the paths, though the phase information is lost due to its absence in the measured RSRPs (34). Ho wev er, the estimate constructed based on the APS statistics still captures the large-scale propagation feature under the limitation of practical cellular channel measurement, bringing a distinct performance to multi-cell coordinated transmission, as shown in Sec. V. 10 ˆ h i g = X N θ i a =1 q ˆ ¯ α i g ,i a a ( θ i a ) . (36) Follo wing this procedure, a CKM including the channel esti- mates { ˆ h i g } i g =1 ,...,N g for BS ℓ ∈ L can be established. V . S I M U L A T I O N R E S U LT S In this section, extensi ve simulations are conducted to validate our proposed SD-USCB framew ork. The network includes L = 3 cells, each with a BS equipped with N t = 32 transmit antennas and N r = 64 recei ving antennas. The BSs are located a t coordinates (0 , 0) (180 , 0) , and (90 , 90 √ 3) (unit: m). There are |U ℓ | = 40 users associated with each BS, which schedules a maximum of 18 users in each epoch, unless stated otherwise. The velocity of each user is set to v = 20 m/s. The transmit power budget of each BS is P ℓ = 36 dBm. The carrier frequency of the ISA C signal is f c = 30 GHz. The length of each epoch and the backhaul delay are set to ∆ T = 20 ms and T d = 4 ms, respectively . The CKM grid size is chosen to match the maximum user displacement per epoch, v · ∆ T , maintaining CSI fidelity while avoiding high CKM computational cost; in our simulations, this corresponds to 0 . 4 m × 0 . 4 m. The DL communication intra-cell channel in the n -th epoch is generated as h ℓ,k ℓ n ( t ) = q α ℓ,k ℓ 1 ,n ( t ) e j w ℓ,k ℓ 1 ,n a ϕ ℓ,k ℓ 1 ,n + X N p q =2 q α ℓ,k ℓ q,n ( t ) e j w ℓ,k ℓ q,n a ϕ ℓ,k ℓ q,n , (37) including one LoS path and N p − 1 NLoS paths. The LoS path-loss is modeled as α ℓ,k ℓ 1 ,n ( t ) = α 0 ( d ℓ,k ℓ n ) − η , where α 0 = − 60 dB is the reference path-loss at the distance of 1m and η = 2 . The AoD angle of the NLoS ϕ ℓ,k ℓ q ,n is randomly generated from U ( − π , π ) , and the NLoS path loss satisfies α ℓ,k ℓ 1 ,n /α ℓ,k ℓ q ,n ∈ U (4 , 9) , q > 1 , with U ( a, b ) being the uniform distribution within [ a, b ] . Besides, the inter -cell channel h m,k ℓ n ( t ) generated by N p NLoS paths h m,k ℓ n ( t ) = X N p q =1 q α m,k ℓ q,n ( t ) e j w m,k ℓ q,n a ϕ m,k ℓ q,n , (38) where the phases { w m,k ℓ q ,n } are randomly sampled from N (0 , ( π / 5) 2 ) and N p = 4 . The power of the communication noise σ 2 c satisfies P ℓ P m ∈L P ℓ ∈L P k ℓ ∈U ℓ || h m,k ℓ 1 || 2 P ℓ ∈L L |U ℓ | N t σ 2 c = 15 dB . F or the CKM construction, the precoding matrix W for RSRP measurement is generated from discrete Fourier transform (DFT) matrices with N b = 64 , and the measurement noise power equals σ 2 c . W ith RSRP measurements, the OLS algo- rithm [44] is applied to solve problem (35) to recover the corresponding expected APS v alues. For the sensing, the pa- rameters appeared in (16) are set as a θ = 0 . 1 , a τ = 6 . 7 × 10 − 7 , a µ = 0 . 1 , G = 10 , and ¯ c = 1 . A. P erformance of Pr oposed DualOpt-Based BF Algorithm 2 Fig. 5 shows the con ver gence behavior of our proposed DualOpt-based ISAC BF Algorithm 2, benchmarked against the SDR-based algorithm [1]. One can observe that both algo- rithms con ver ge within about 10 iterations. Upon con vergence, the achieved PFR of our proposed Algorithm 2 is almost the same as that of the SDR-based approach. Howe ver , as 1 2 3 4 5 6 7 8 9 10 40 50 60 70 80 90 100 110 120 130 10 0 10 2 40 60 80 100 120 140 Fig. 5. PFR achieved by different BF algorithms versus FP iteration. T ABLE I A V E RA G E C OM P U T A T I ON A L T IM E ( S ) P E R B S P E R E P O C H Algorithm |S n | = 18 |S n | = 36 |S n | = 54 ISA C BF (SDR) 6.7 19 33 ISA C BF (DualOpt) 0.9 1.1 2.4 evidenced in Fig. 5, Algorithm 2 substantially reduces com- putational time. This o wes to that our design of Algorithm 2 directly tackles the problem (24) over vector v ariables, thereby circumventing relaxation to a high-dimension SDP . Moreover , Algorithm 2 fully exploits the problem structure as highlighted in Remark 1 and takes only first-order computations, making it very ef ficient. In T able 1, the a veraged computational time ov er 10 epochs of the tw o algorithms is compared under different numbers of users |S n | = P ℓ |S ℓ n | scheduled in the ov erall network. Compared with its counterpart, Algorithm 2 achiev es more than 7-fold reduction in computational time for |S n | = 18 , with e ven greater gains observed as |S n | increases. These results confirm that our proposed ISAC BF Algorithm 2 not only enhances PFR effecti vely but also deliv ers significant computational ef ficiency . B. Effectiveness of Pr oposed SD-USCB F ramework In Fig. 6, we show the accumulated PFR achieved by our proposed SD-USCB framework. For comparison, we also include three schemes for BF design: the classic centralized weighted minimum mean square error (CWMMSE) algorithm [45], the per-cell WMMSE (PWMMSE) algorithm, and the FP algorithm that solves the SALINR-based virtual PFR distributi vely . All benchmark schemes are implemented under perfect CSI, and their BF optimization does not account for the sensing requirements. Besides, the y all employ the scheduling algorithm in [46] for user scheduling. As anticipated, CWMMSE as an ideal scheme achie ves the highest accumulated PFR, since it has perfect intra-cell and inter-cell CSI. In contrast, PWMMSE yields the lowest PFR, as it only alle viates the intra-cell interference while completely ignoring inter-cell interference. This also renders extremely low rates for certain users, which after logarithmic transformation in (7a), produce negati ve values – explaining why PWMMSE’ s accumulated PFR declines after epoch 6. Meanwhile, SALINR (Perfect CSI) approaches CWMMSE in 11 1 2 3 4 5 6 7 8 9 10 200 300 400 500 600 700 800 900 1000 Fig. 6. Accumulated PFR achie ved by different schemes versus epoch. 0.01 0.1 1 5 10 480 490 500 510 520 530 540 550 Fig. 7. Accumulated PFR achieved by SD-USCB under different sensing thresholds. performance. Notably , our SD-USCB framework deli vers ac- cumulated PFR nearly on par with SALINR and substantially surpasses PWMMSE, demonstrating its ef ficacy in improving the netw ork performance under practical limitations. Critically , in contrast to CWMMSE and SALINR, SD- USCB significantly reduces CSI acquisition overhead and cross-cell information exchange by integrating proactiv e sens- ing with CKM – a crucial advantage for practical networks with bandwidth-limited backhauls. Moreover , SD-USCB’ s dis- tributed processing markedly alleviates the computational b ur- den at a single node (CU) required by CWMMSE, offering superior scalability in lar ge-scale networks. C. Impact of Sensing Err or Thr eshold In Fig. 7, the impact of dif ferent v alues of the sensing error threshold ¯ c in (17) on the PFR achieved by our proposed SD-USCB is examined. T o isolate the influences from other factors, we apply Algorithm 1 to schedule |S ℓ n | = 18 users in the 1st epoch, maintain this scheduling set throughout the subsequent 9 epochs, and observe the accumulated FPR achiev ed in epoch 10. Interestingly , one can see that a stringent sensing requirement ¯ c = 0 . 01 would result in a decline in PFR performance. This is because BSs in the network need to allocate more resources to meet the sensing requirements, while fewer resources are left for communication. Con versely , 1 2 3 4 5 6 7 8 9 10 200 300 400 500 600 700 800 Fig. 8. Accumulated PFR of different scheduling algorithms versus epoch. 1 2 3 4 5 6 7 8 9 10 200 300 400 500 600 700 Fig. 9. Accumulated PFR vs. epoch: SALINR vs. SLINR BF . when the threshold of sensing error is too lar ge, i.e., ¯ c = 10 , the accuracy of sensed user kinematic parameters is not guaranteed. As a result, the estimated user locations would hav e large errors. When these locations are input to the CKMs for CSI query , the accurac y of the attained CSI estimates will degrade, leading to a decreased PFR. In comparison, when the threshold ¯ c is set between 0.1 and 1, the performance is better, implying this range ensures suf ficient sensing accurac y while leaving more resources av ailable for communication. D. Impact of Scheduling T o examine the ef ficacy of our dev eloped scheduling Algo- rithm 1 in the SD-USCB framew ork, we compare SD-USCB against two benchmark schemes that modify only the user scheduling algorithm while keeping the rest of the framework unchanged. Specifically , ‘SD-USCB (No scheduling)’ selects all users in U ℓ , ℓ ∈ L for transmission in each epoch, while ‘SD-USCB (Hungarian)’ replaces Algorithm 1 by the Hungarian algorithm [47]. For SD-USCB (without scheduling), since all users are scheduled in each epoch, the ISA C beams pointing to these geographically nearby users overlap easily , causing sev ere interference. As a result, BSs need to in vest more resources to meet the sensing requirements. Meanwhile, the interference deteriorates the communication performance, so its achie ved 12 PFR is the lo west. While the accumulated PFR of SD- USCB (Hungarian) is higher than that of SD-USCB (W ithout scheduling), it remains significantly lower than SD-USCB (Algorithm 1). One possible reason is that the user set selected by the Hungarian algorithm exhibits stronger user channel correlations than those in Algorithm 1, which leads the BS to cost more resources for interference alle viation. These results validate the ef ficacy of the scheduling Algorithm 1. E. SALINR vs SLINR in BF Fig. 9 compares the performance of our proposed SD- USCB framew ork with BF based on SALINR and that with BF based on con ventional SLINR [18]. As pointed out in Sec. III-B, SLINR approximates the original incoming cross- cell interference to a serving user by the leakage from that user to scheduled users in other cells. In contrast, SALINR approximates this interference using the arithmetic mean of the interference power generated by BS ℓ to all scheduled users in other cells. While the arithmetic mean operation is straightforward, the BF based on SALINR deliv ers a remark- able performance improv ement. As shown in Fig. 9, under the same number of scheduled users per cell |S ℓ n | , SD-USCB [BF: SALINR] outperforms SD-USCB [BF: SLINR], with the performance gap widening over successi ve epochs. Moreov er , with |S ℓ n | increasing from 18 to 22, the performance gain of SD-USCB [BF: SALINR] is more pronounced. This is because SALINR can provide a more accurate approximation of the original SINR, as analytically established in Theorem 1. The underlying insight is that SALINR reduces the discrepancy between the leakage from a single user and the interference that user experiences by considering the av erage interference leakage at the cell level. While Theorem 1 is deriv ed under Rayleigh channels, the results in Fig. 9 demonstrate that SALINR-based BF also achie ves better performance in general multi-path channels, confirming its superiority and resilience for D-MCRA design. V I . C O N C L U S I O N In this paper, we hav e inv estigated the D-USCB design in multi-cell mmW av e networks. T o o vercome the challenges of inter-cell CSI acquisition and the large information ex- change overhead through the limited-bandwidth backhauls, we hav e proposed a new SD-USCB framew ork. Our framework includes: (i) a novel combination of the CKM and ISAC techniques for acquiring the inter -cell CSI with low backhaul ov erhead; (ii) a leakage-based metric SALINR to achiev e fully distributed BF optimization, with its superiority in SINR approximation being theoretically established; (iii) a heuristic distributed user scheduling algorithm to mitigate the intra-cell interference; and (i v) an ef ficient dualOpt-based ISA C BF al- gorithm that improves the network performance while greatly reducing the computational time. Besides, we presented an approach to construct CKMs from RSRP measurements via LSCM techniques. By e xtensiv e simulations, we hav e demon- strated that our proposed frame work can effecti vely enhance the network throughput with greatly reduced overhead for CSI acquisition and information exchange. A P P E N D I X A P RO O F O F T H E O R E M 1 Giv en a set of fixed beamformers { v k ℓ n } with ∥ v k ℓ n ∥ 2 = P , k ℓ ∈ U ℓ , ℓ ∈ L . For independent Rayleigh f ading channels, h m,k ℓ n ∼ C N ( 0 , I N t ) , and the inner product of h m,k ℓ n and v m,k ℓ n will satisfy ( h m,k ℓ n ) H v t m n ∼ C N (0 , P ) , (39) Moreov er , the square of its magnitude follo ws an e xponential distribution | ( h m,k ℓ n ) H v t m n | 2 ∼ Exp( P ) . As I k ℓ n is the sum of M = P m = ℓ P t m q t m n independent Exp( P ) random variables, it follo ws a Gamma distribution as I k ℓ n ∼ Gamma( M , P ) , (40) whose mean is E [ I k ℓ n ] = M P and variance is V ar[ I k ℓ n ] = M P 2 . Similarly , the con ventional leakage term ˆ L k ℓ n will satisfy ˆ L k ℓ n ∼ Gamma( M , P ) , (41) while our proposed a veraged leakage ˜ L k ℓ n satisfies ˜ L k ℓ n ∼ Gamma( M , P / p |S ℓ n | ) , (42) with |S ℓ n | = P j ℓ ∈U ℓ q j ℓ n . For R k ℓ n ( I k ℓ n ) = log 1 + S k ℓ n / ( T k ℓ n + I k ℓ n + σ 2 c ) , it is not difficult to verify that its deri vati ve R k ℓ n ′ ( I k ℓ n ) is non-increasing ov er I k ℓ n ≥ 0 . Therefore, the Lipschitz constant of R k ℓ n ( I k ℓ n ) can be bounded as sup I k ℓ n ≥ 0 | R k ℓ n ′ ( I k ℓ n ) | ≤ S k ℓ n ( σ 2 c + T k ℓ n )( σ 2 c + T k ℓ n + S k ℓ n ) (43a) ≤ S k ℓ n σ 2 c ( σ 2 c + S k ℓ n ) ≜ Z k ℓ n , (43b) with S k ℓ n = | ( h ℓ,k ℓ n ) H v k ℓ n | 2 ∼ Exp( P ) and T k ℓ n ≥ 0 . Define the rate approximation errors as ζ k ℓ n, 1 = ˆ R k ℓ n − R k ℓ n and ζ k ℓ n, 2 = ˜ R k ℓ n − R k ℓ n , and the ICI approximation errors as ϵ k ℓ n, 1 = ˆ L k ℓ n − I k ℓ n and ϵ k ℓ n, 2 = ˜ L k ℓ n − I k ℓ n . Based on the Lipschitz continuity of R k ℓ n ( I k ℓ n ) , we hav e | ζ k ℓ n,i | ≤ Z k ℓ n | ϵ k ℓ n,i | , i = 1 , 2 . (44) Further , applying the Cauchy–Schwarz inequality yields the expected error bound of rate approximations E { h k ℓ n } ζ k ℓ n,i ≤ ( ¯ Z k ℓ n ) 1 / 2 E { h k ℓ n } [( ϵ k ℓ n,i ) 2 ] 1 / 2 , i = 1 , 2 , (45) where ¯ Z k ℓ n = E { h k ℓ n } [( Z k ℓ n ) 2 ] = R ∞ 0 s 2 σ 4 c ( σ 2 c + s 2 ) 2 1 P e − s/P ds . As the true ICI I k ℓ n and the con ventional leakage ˆ L k ℓ n follow identical Gamma distributions, with the independence assump- tion, the expected MSE of the SLINR-based ICI approximation simplifies to the sum of their v ariances as E { h k ℓ n } [( ϵ k ℓ n, 1 ) 2 ] = V ar( ˆ L k ℓ n ) + V ar( I k ℓ n ) = 2 M P 2 , (46) Similarly , the expected MSE of the SALINR-based ICI ap- proximation will be E { h k ℓ n } [( ϵ k ℓ n, 2 ) 2 ] = V ar( ˜ L k ℓ n ) + V ar( I k ℓ n ) = M P 2 1 + 1 / |S ℓ n | . (47) Apparently , E { h k ℓ n } [( ϵ k ℓ n, 2 ) 2 ] < E { h k ℓ n } [( ϵ k ℓ n, 1 ) 2 ] holds as long as |S ℓ n | > 1 , with the improv ement becoming more significant as |S ℓ n | increases. Substituting (46) and (47) into (45) com- pletes the proof. ■ 13 R E F E R E N C E S [1] T . Cai, L. Li, and T .-H. Chang, “Sensing-Assisted Distributed User Scheduling and Beamforming in Muli-Cell mmW av e Networks, ” in Pr oc. IEEE ICASSP , Seoul, Korea, Apr . 2024, pp. 81–85. [2] M. Li, I. B. Collings, S. V . Hanly , C. Liu, and P . Whiting, “Multicell coordinated scheduling with multiuser zero-forcing beamforming, ” IEEE T rans. W ireless Commun. , vol. 15, no. 2, pp. 827–842, 2015. [3] S. He, J. Y uan, Z. An, W . Huang, Y . Huang, and Y . Zhang, “Joint user scheduling and beamforming design for multiuser MISO downlink systems, ” IEEE T rans. W ir eless Commun. , vol. 22, no. 5, pp. 2975–2988, 2022. [4] Y . Xu, E. G. Larsson, E. A. Jorswieck, X. Li, S. Jin, and T .-H. Chang, “Distributed Signal Processing for Extremely Large-Scale Antenna Ar- ray Systems: State-of-the-Art and Future Directions, ” IEEE J . Sel. T opics Signal Pr ocess. , v ol. 19, no. 2, pp. 304–330, 2025. [5] Y .-F . Liu, T .-H. Chang, M. Hong, Z. Wu, A. Man-Cho So, E. A. Jorswieck, and W . Y u, “A Survey of Recent Advances in Optimization Methods for Wireless Communications, ” IEEE J . Sel. Areas Commun. , vol. 42, no. 11, pp. 2992–3031, 2024. [6] T . S. Group, “Radio Access Network: NR; Physical layer procedures for data (Release 16), ” 3r d Generation P artnership Pr oject (3GPP), V ersion 16.1.0, document TS 38.214 , 2020. [7] ——, “Evolved Univ ersal T errestrial Radio Access (E-UTRA); Physical layer; Measurements (Release 16), ” 3rd Generation P artnership Project (3GPP), V ersion 16.2.0, document TS 36.214 , 2021. [8] Y . Zeng, J. Chen, J. Xu, D. W u, X. Xu, S. Jin, X. Gao, D. Gesbert, S. Cui, and R. Zhang, “A Tutorial on Environment-A ware Communications via Channel Knowledge Map for 6G, ” IEEE Commun. Surv . T utor . , vol. 26, no. 3, pp. 1478–1519, 2024. [9] S. Zhang, X. Ning, X. Zheng, Q. Shi, T .-H. Chang, and Z.-Q. Luo, “A Physics-Based and Data-Dri ven Approach for Localized Statistical Channel Modeling, ” IEEE Tr ans. W ireless Commun. , vol. 23, no. 6, pp. 5409–5424, 2024. [10] T . Cai, S. Ge, Y . Xu, and T .-H. Chang, “Approaching centralized multi- cell coordinated beamforming with limited backhaul signaling, ” in Proc. IEEE ICC , Roma, May 2023, pp. 3559–3564. [11] A. Padmanabhan, A. T ¨ olli, and I. Atzeni, “Distributed two-stage multi- cell precoding, ” in Pr oc. IEEE SP A WC , Cannes, July 2019, pp. 1–5. [12] K. Shen, W . Y u, L. Zhao, and D. P . Palomar , “Optimization of MIMO device-to-de vice networks via matrix fractional programming: A minorization–maximization approach, ” IEEE/ACM T rans. Networking , vol. 27, no. 5, pp. 2164–2177, 2019. [13] T . W ang and L. V andendorpe, “Successive con vex approximation based methods for dynamic spectrum management, ” in Proc. IEEE ICC , Ottawa, Jun. 2012, pp. 4061–4065. [14] W . Y u, T . Kwon, and C. Shin, “Multicell coordination via joint scheduling, beamforming, and power spectrum adaptation, ” IEEE Tr ans. Commun. , vol. 12, no. 7, pp. 1–14, 2013. [15] Q. Shi, M. Razaviyayn, Z.-Q. Luo, and C. He, “An iteratively weighted MMSE approach to distributed sum-utility maximization for a MIMO interfering broadcast channel, ” IEEE Tr ans. Signal Process. , vol. 59, no. 9, pp. 4331–4340, 2011. [16] S. K. Joshi, M. Codreanu, and M. Latv a-aho, “Distributed resource allocation for MISO downlink systems via the alternating direction method of multipliers, ” EURASIP J. W ir eless Comm. , vol. 2014, pp. 1–19, 2014. [17] E. Casta ˜ neda, A. Silv a, R. Samano-Robles, and A. Gameiro, “Distributed linear precoding and user selection in coordinated multicell systems, ” IEEE T rans. V eh. T echnol. , vol. 65, no. 7, pp. 4887–4899, 2015. [18] Z. Li, T . Gamvrelis, H. A. Ammar, and R. Adve, “Decentralized user scheduling and beamforming in multi-cell MIMO networks, ” in Pr oc. IEEE ICC , Seoul, Aug. 2022, pp. 1980–1985. [19] D. Han and N. Lee, “Distributed precoding using local CSIT for MU-MIMO heterogeneous cellular networks, ” IEEE T rans. Commun. , vol. 69, no. 3, pp. 1666–1678, 2020. [20] F . Dong, F . Liu, Y . Cui, W . W ang, K. Han, and Z. W ang, “Sensing as a service in 6G perceptiv e networks: A unified framew ork for ISAC resource allocation, ” IEEE Tr ans. Wir eless Commun. , vol. 22, no. 5, pp. 3522–3536, 2022. [21] F . Liu, Y .-F . Liu, A. Li, C. Masouros, and Y . C. Eldar , “Cram ´ er-Rao bound optimization for joint radar-communication beamforming, ” IEEE T rans. Signal Pr ocess. , vol. 70, pp. 240–253, 2021. [22] M. Zhu, L. Li, S. Xia, and T .-H. Chang, “Information and sensing beamforming optimization for multi-user multi-target MIMO ISAC systems, ” EURASIP J Adv Signal Process. , vol. 2023, no. 1, p. 15, 2023. [23] Y . Cao and Q.-Y . Y u, “Joint resource allocation for user-centric cell-free integrated sensing and communication systems, ” IEEE Commun. Lett. , 2023. [24] K. Zhang, L. Li, T .-H. Chang, C. Shen, and R. He, “Joint Fronthaul Compression and Power Allocation Optimization for Networked ISAC, ” IEEE T rans. V eh. T echnol. , pp. 1–6, 2024. [25] N. Babu, C. Masouros, C. B. Papadias, and Y . C. Eldar , “Precoding for Multi-Cell ISAC: From Coordinated Beamforming to Coordinated Multipoint and Bi-Static Sensing, ” IEEE T rans. W ireless Commun. , vol. 23, no. 10, pp. 14 637–14 651, 2024. [26] L. Li, M. Zhu, S. Xia, and T .-H. Chang, “Downlink CSI Recovery in Massiv e MIMO Systems by Proactive Sensing, ” IEEE W ir el. Commun. Lett. , vol. 12, no. 3, pp. 406–410, 2023. [27] F . Liu, W . Y uan, C. Masouros, and J. Y uan, “Radar-Assisted Predictive Beamforming for V ehicular Links: Communication Served by Sensing, ” IEEE T rans. W ireless Commun. , vol. 19, no. 11, pp. 7704–7719, 2020. [28] L. Li, J. Zhang, and T .-H. Chang, “Beamforming Optimization for Robust Sensing and Communication in Dynamic MmW ave MIMO Networks, ” IEEE J. Sel. Ar eas Commun. , vol. 43, no. 4, pp. 1354–1370, 2025. [29] Z.-Q. Luo, W .-K. Ma, A. M.-C. So, Y . Y e, and S. Zhang, “Semidefinite Relaxation of Quadratic Optimization Problems, ” IEEE Signal Process. Mag. , vol. 27, no. 3, pp. 20–34, 2010. [30] Y . Zeng and X. Xu, “T oward Environment-A ware 6G Communications via Channel Knowledge Map, ” IEEE W irel. Commun. , vol. 28, no. 3, pp. 84–91, 2021. [31] Z. Dai, D. W u, Z. Dong, K. Li, D. Ding, S. W ang, and Y . Zeng, “Prototyping and experimental results for en vironment-aware millimeter wav e beam alignment via channel kno wledge map, ” IEEE T rans. V eh. T ec hnol. , vol. 73, no. 11, pp. 16 805–16 816, 2024. [32] Z. Xu, Z. Zhou, D. W u, and Y . Zeng, “Channel knowledge map- enhanced clutter suppression for inte grated sensing and communication, ” in Pr oc. IEEE ICCC W orkshops , Hangzhou, Aug. 2024, pp. 90–95. [33] X. He, P . Y ue, Q. Lu, and Y . Y in, “Evolution and key technologies of 5G-oriented IP RAN.” T elecommunications Science , vol. 36, no. 3, 2020. [34] J. Lee, J. Gu, S. J. Bae, and M. Y . Chung, “A resource allocation scheme for improving user fairness in device-to-de vice communication based on cellular networks, ” in ICUIMC , Jan. 2013, pp. 1–6. [35] S. Wu, Y . W ei, S. Zhang, and W . Meng, “Proportional-fair resource allocation for user-centric networks, ” IEEE T rans. V eh. T echnol. , vol. 71, no. 2, pp. 1549–1561, 2021. [36] D. W u, Y . Zeng, S. Jin, and R. Zhang, “En vironment-A ware Hybrid Beamforming by Leveraging Channel Knowledge Map, ” IEEE Tr ans. W ireless Commun. , vol. 23, no. 5, pp. 4990–5005, 2024. [37] A. T olli, H. Pennanen, and P . Komulainen, “Distributed coordinated multi-cell transmission based on dual decomposition, ” in Pr oc. IEEE GLOBECOM . Honolulu: IEEE, Mar . 2009, pp. 1–6. [38] M. Maros and J. Jald ´ en, “ADMM for distrib uted dynamic beamforming, ” IEEE T rans. Signal Inf. Process. Netw . , vol. 4, no. 2, pp. 220–235, 2017. [39] M. Sadek, A. T arighat, and A. H. Sayed, “A leakage-based precoding scheme for downlink multi-user MIMO channels, ” IEEE T rans. W ir eless Commun. , vol. 6, no. 5, pp. 1711–1721, 2007. [40] M. Sadek and S. Aissa, “Leakage based precoding for multi-user MIMO- OFDM systems, ” IEEE T rans. W ir eless Commun. , vol. 10, no. 8, pp. 2428–2433, 2011. [41] R. Tian, Z. W ang, and X. T an, “A new leakage-based precoding scheme in IoT oriented cognitive MIMO-OFDM systems, ” IEEE Access , vol. 6, pp. 41 023–41 033, 2018. [42] P . A. Lopes and J. A. Gerald, “Leakage-based precoding algorithms for multiple streams per terminal MU-MIMO systems, ” Digital Signal Pr ocessing , vol. 75, pp. 38–44, 2018. [43] R. Rostami, G. Costantini, and D. G ¨ orges, “ADMM-based distributed model predictiv e control: Primal and dual approaches, ” in Pr oc. IEEE CDC , Melbourne, Dec. 2017, pp. 6598–6603. [44] L. Lu, W . Xu, Y . W ang, and Z. Tian, “Recovery conditions of sparse signals using orthogonal least squares-type algorithms, ” IEEE T rans. Signal Pr ocess. , v ol. 70, pp. 4727–4741, 2022. [45] S. S. Christensen, R. Agarwal, E. De Carvalho, and J. M. Cioffi, “W eighted sum-rate maximization using weighted MMSE for MIMO- BC beamforming design, ” IEEE T rans. W ir eless Commun. , vol. 7, no. 12, pp. 4792–4799, 2008. [46] T . Y oo and A. Goldsmith, “On the optimality of multiantenna broad- cast scheduling using zero-forcing beamforming, ” IEEE J. Sel. Areas Commun. , vol. 24, no. 3, pp. 528–541, 2006. [47] H. W . Kuhn, “The Hungarian method for the assignment problem, ” Naval r esear ch logistics quarterly , vol. 2, no. 1-2, pp. 83–97, 1955.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment