Analysis and Design of Reset Control Systems via Base Linear Scaled Graphs
In this letter, we prove that under mild conditions, the scaled graph of a reset control system is bounded by the scaled graph of its underlying base linear system, i.e., the system without resets. Building on this new insight, we establish that the …
Authors: T. de Groot, W. P. M. H. Heemels, S. J. A. M. van den Eijnden
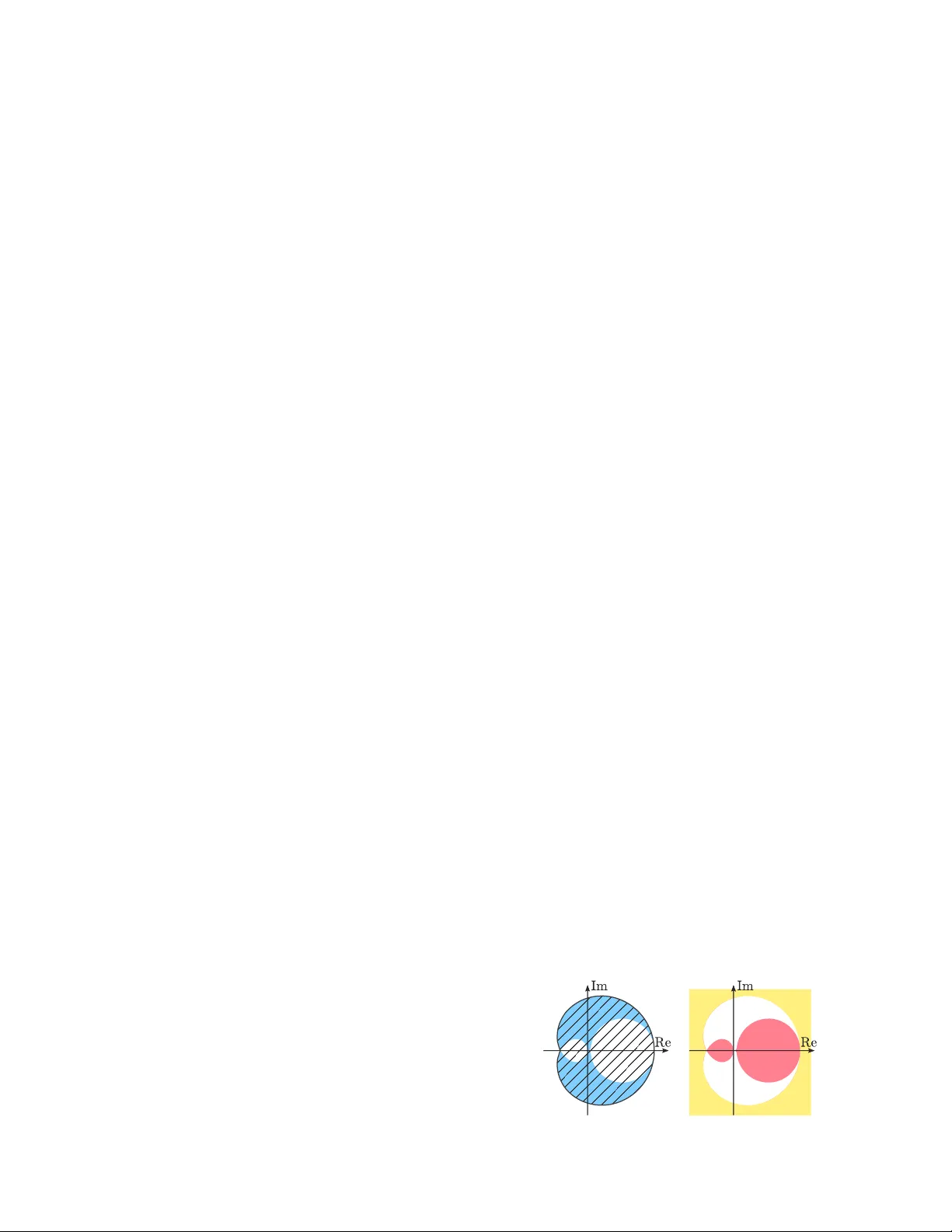
Analysis and Design of Reset Control Systems via Base Linear Scaled Graphs T . de Groot, W .P .M.H. Heemels, and S .J .A.M. van den Eijnden Abstract — In this letter , we pro ve that under mild condi- tions, the scaled graph of a reset control system is bounded by the scaled graph of its underlying base linear system, i.e., the system without resets. Building on this new insight, we establish that the negative feedbac k interconnection of a linear time-inv ariant plant and a reset controller is stable, if the scaled graphs of the underlying base linear components are strictly separated. This result simplifies reset system analysis, as stability conditions reduce to verifying pr oper ties of linear time-in variant systems. W e exploit this result to develop a systematic approach for reset control system design. Our framew ork also accommo- dates reset systems with time-regularization, which were not addressed in the context of scaled graphs bef ore. Index T erms — Scaled Relative Graphs, Reset Contr ol Systems, Stability Analysis, LMIs I . I N T R O D U C T I O N R ESET controllers can overcome fundamental limitations of linear time-inv ariant (L TI) control systems [1], [2]. Due to the performance benefits reset control systems can offer , they have attracted significant interest ov er the past decades, leading to substantial progress in their analysis and design; see, e.g., [3]–[10]. Despite these dev elopments, a significant challenge remains in deriving intuitiv e and system- atic design methods for reset control systems that align with classical loop-shaping techniques for L TI systems, which still form the core of industrial control engineering today . T o address this challenge, sev eral works hav e proposed frequency-domain methods for stability analysis of reset con- trol systems that hinge on connections with the Kalman- Y akubo vich-Popov lemma [11]. Although effecti ve, these ap- proaches are only applicable to Lur’e-like systems, i.e., the feedback interconnection of an L TI plant and a reset element, and are often tailored to ward the specific reset controller at hand [4], [5]. A different approach comes from the recently introduced notion of scaled graphs (SGs) [12], [13]. The SG of a nonlinear system bears a strong resemblance to the classical Nyquist diagram for L TI systems, and enables graph- ical Nyquist-like stability tests for general nonlinear feedback interconnections beyond the Lur’e frame work. As such, SGs offer a bridge towards graphical loop-shaping methods for reset control system design. The authors are with the Depar tment of Mechanical Engineer- ing, Eindhoven University of T echnology , The Netherlands (email: { t.d.groot2, m.heemels, s.j.a.m.v .d.eijnden } @tue.nl). Research par tly suppor ted by the European Union (ERC Advanced Grant, Proacthis, no . 10105538). Obtaining the SG of nonlinear systems in general, and reset systems in specific, is not straightforward, as this requires cap- turing system responses to an infinite (uncountable) number of input signals. Recently , computationally tractable methods for ov er-approximating SGs of reset systems hav e been proposed in [8], [14]. Ke y in these approaches is the connection between dissipativity , integral quadratic constraints (IQCs) and SGs to formulate the construction of over -approximations of SGs as linear matrix inequalities (LMIs). These over -approximations are valuable for robust stability and performance analysis, but currently offer limited guidance for controller tuning due to an incomplete understanding in general of how changes in parameters affect the shape of the SG. For L TI systems, on the other hand, such understanding is more dev eloped due to the strong connection between the system’ s Nyquist diagram and its SG, see [13, Section V]. In view of the above, in this paper we aim to exploit SGs of L TI systems for the analysis and design of reset systems. T o this end, we make three main contributions. First, we formally show that the SG of a reset system is bounded (in a sense that we will make precise) by the SG of its underlying base linear system (BLS), i.e., the system without resets. It thus follows that reset systems inherit input-output properties of their BLS as reflected in their SGs. This result generalizes the findings in [9], where it was sho wn that a reset system is input/output/strictly passiv e, if its BLS is input/output/strictly passiv e. Second, we use this new result to formulate feedback stability conditions for reset control systems that are entirely based on the SG of the underlying BLS. As the latter can be constructed efficiently from the transfer function of the BLS [13], (robust) stability analysis is simplified. Third, we utilize these analysis conditions for SG-based design of reset control systems. In particular, our reset control design procedure in volv es shaping the SG of the BLS, connecting loop-shaping with reset control design. W e demonstrate the ef fectiv eness of this new perspecti ve through an illustrative example. Our results also allo w for reset systems with time-regularization schemes [10], often crucial to guarantee well-posed behaviour of the control system. Time-re gularized reset systems hav e not been addressed before in the SG context. I I . B A C K G R O U N D A N D P R E L I M I N A R I E S Let R and R ≥ 0 denote the sets of real numbers and non- negati ve real numbers, C the set of complex numbers, and C ∞ = C ∪ {∞} . For z ∈ C , we denote its real and imaginary parts by Re { z } and Im { z } , its magnitude by | z | , and its complex conjugate by ¯ z . The in verse is defined as z † := ¯ z / | z | 2 if z = 0 , and z † = ∞ if z = 0 . The closure of a set S ⊆ C ∞ is denoted by S , and its complement by S c := C ∞ \ S . A set S ⊆ X ⊆ C is an unbounded component of X if: 1) S is unbounded, 2) S is connected, 3) A ⊆ S and A connected implies A = S . If S is bounded, S c has one unbounded component, which we denote ( S c ) ∞ . W e refer to [15] for details. The in verse of a set S ⊆ C ∞ is giv en by S † = z † | z ∈ S . The distance between two sets S 1 , S 2 ⊆ C ∞ is denoted by dist ( S 1 , S 2 ) := inf a ∈ S 1 , b ∈ S 2 | a − b | , where |∞ − ∞| := 0 . The n × n identity matrix is denoted I n . The set of m × m real symmetric matrices is denoted S m := { P ∈ R m × m | P = P ⊤ } . W e adopt standard con vention for positive/ne gativ e (semi-)definite matrices and denote S m ⪰ 0 := { P ∈ S m | P ⪰ 0 } . A. Signal spaces, systems , and stability The set of square-integrable functions is denoted by L n 2 = u : R ≥ 0 → R n | Z ∞ 0 u ( t ) ⊤ u ( t ) dt < ∞ and equipped with the inner product and norm ⟨ u, y ⟩ = Z ∞ 0 u ( t ) ⊤ y ( t ) dt and ∥ u ∥ = p ⟨ u, u ⟩ . W e define the extended L 2 -space as L n 2 e = { u : R ≥ 0 → R n | P T u ∈ L n 2 for all T > 0 } , where for T ≥ 0 , P T is the truncation operator on a signal u : R ≥ 0 → R n such that P T u : R ≥ 0 → R n with ( P T u )( t ) = u ( t ) when t ∈ [0 , T ] , and ( P T u )( t ) = 0 when t > T . W e write u = 0 to mean the signal u is zero almost e verywhere. W e consider (possibly multi-v alued) systems H that map inputs u ∈ L n 2 e to outputs y ∈ L n 2 e . W e will only consider squar e systems, i.e., systems with an equal number of inputs and outputs. Note that non-square systems can be treated by patching them with zero maps to make them square. As a shorthand notation, we write y ∈ H ( u ) to indicate all possible outputs related to the input u when applied to the system H . W e assume that the system uniquely maps the zero input to zero output signals, i.e., H (0) = { 0 } . A system is said to be causal if P T y ∈ P T H ( P T u ) for all T ≥ 0 , all u ∈ L n 2 and all y ∈ H ( u ) . W e will adopt the following notions of stability . Definition 1: A causal system H : L n 2 e ⇒ L n 2 e is: • stable if H ( u ) ∈ L n 2 for all u ∈ L n 2 ; • bounded if it is stable and ∥ H ∥ := sup 0 = u ∈L n 2 sup y ∈ H ( u ) ∥ y ∥ ∥ u ∥ < ∞ . W e will refer to ∥ H ∥ as the L 2 -gain of H . A system H is said to be linear if H ( au 1 + u 2 ) = aH ( u 1 ) + H ( u 2 ) for all u 1 , u 2 ∈ L n 2 e , and a ∈ R . It is said to be time- in v ariant if H ( S T u ) = S T H ( u ) for all u ∈ L n 2 e , T ≥ 0 , and where S T is the time shift operator on a signal u : R ≥ 0 → R n such that S T : R ≥ 0 → R n with ( S T u )( t ) = u ( t − T ) if t ≥ T , and ( S T u )( t ) = 0 otherwise. W e consider causal linear time- in v ariant (L TI) systems represented in state-space form as G : ( ˙ x = Ax + B u, x (0) = 0 , y = C x + D u, (1) with state x ( t ) ∈ R m , input u ( t ) ∈ R n , output y ( t ) ∈ R n at time t ∈ R ≥ 0 , and matrices A, B , C, D of appropriate sizes. Equiv alently , G can be represented in the Laplace domain (with some abuse of notation) by the transfer function G ( s ) = C ( sI − A ) − 1 B + D , with s ∈ C . W e call an L TI system normal, if its transfer function satisfies G ( s ) G ( s ) = G ( s ) G ( s ) for al s ∈ C . B. Scaled graphs and f eedback analysis Giv en signals u ∈ L n 2 and y ∈ L n 2 , we define the gain ρ ( u, y ) from u to y by ρ ( u, y ) := ∥ y ∥ / ∥ u ∥ if u = 0 , ρ ( u, y ) = 0 if u, y = 0 and ρ ( u, y ) = ∞ if u = 0 , y = 0 . The phase θ ( u, y ) from u to y is defined by θ ( u, y ) := arccos ⟨ u,y ⟩ ∥ u ∥∥ y ∥ if u, y = 0 and θ ( u, y ) = 0 otherwise. Likewise, the gain and phase from signal u ∈ L n 2 e to signal y ∈ L n 2 e for window length T > 0 are defined by ρ T ( u, y ) := ρ ( P T u, P T y ) and θ T ( u, y ) := θ ( P T u, P T y ) . (2) Equipped with these notions for gain and phase, we define soft and hard scaled graphs. Definition 2: i) For a causal and bounded system H : L n 2 ⇒ L n 2 the soft Scaled Graph is defined as SG ( H ) := ρ ( u, y ) e ± j θ ( u,y ) | u ∈ L n 2 , y ∈ H ( u ) . ii) For a causal system H : L n 2 e ⇒ L n 2 e , the har d Scaled Graph is defined as SG e ( H ) := ρ T ( u, y ) e ± j θ T ( u,y ) | u ∈ L n 2 e , y ∈ H ( u ) , T > 0 . Scaled graphs of fer an elegant means for graphical analysis of feedback systems in Fig. 1. Here, H 1 , H 2 : L n 2 e ⇒ L n 2 e are causal systems, w ∈ L n 2 is an e xternal signal, and u 1 , u 2 , y 1 , y 2 are internal signals. W e denote the closed-loop mapping from w to y 1 by Σ . W e call this system well-posed if for all w ∈ L n 2 , there exist u 1 , u 2 ∈ L n 2 e satisfying u 1 ∈ { w } − H 2 ( u 2 ) = { w − y 2 | y 2 ∈ H 2 ( u 2 ) } and u 2 ∈ H 1 ( u 1 ) . - i - H 1 - H 2 6 y 2 y 1 w u 1 u 2 − Fig. 1 : Feedback interconnection Σ . Theor em 1 ( [16]): Let H 1 , H 2 : L n 2 e ⇒ L n 2 e be causal, stable systems in negati ve feedback interconnection. Suppose the interconnection of H 1 and µH 2 is well-posed for all µ ∈ (0 , 1] . If there exists r > 0 such that for all µ ∈ (0 , 1] , dist ( SG † ( − H 1 ) , SG ( µH 2 )) ≥ r , (3) then Σ is stable. If, in addition, one or both of SG ( H 1 ) and SG ( H 2 ) satisfy the chord property 1 , then ∥ Σ ∥ ≤ 1 /r . □ A few comments regarding Theorem 1 are in order: 1) The chord property enables performance guarantees for the closed-loop system Σ in terms of its L 2 -gain. It distinguishes conditions for stability from those for per- formance, as the former do not require the chord property . 2) An analogous result can be formulated using hard SGs. In this case, unbounded systems are allowed, and the homotopy condition “for all µ ∈ (0 , 1] ” can be removed ( µ = 1 is sufficient), see [16] for details on hard SGs. I I I . S G S A N D R E S E T S Y S T E M S A. Reset systems The class of systems that is considered in this paper is formed by reset systems with time-regularization giv en by R : ˙ x = Ax + B u, ˙ τ = 1 , if q ∈ F or τ ≤ δ, x + = Rx, τ + = 0 , if q ∈ J and τ ≥ δ, y = C x + D u, (4) with states x ( t ) ∈ R m , τ ( t ) ≥ 0 , x (0) = 0 , τ (0) = 0 , threshold δ > 0 , input u ( t ) ∈ R n , output y ( t ) ∈ R n , and q ( t ) = [ x ⊤ ( t ) , u ⊤ ( t )] ⊤ ∈ R m + n all at time t ∈ R ≥ 0 , and where x + ( t ) = lim s ↓ t x ( s ) . The matrix R ∈ R m × m defines the reset map, and the jump and flo w sets are giv en by F = { v ∈ R m + n | v T M v ≥ 0 } , (5a) J = { v ∈ R m + n | v T M v ≤ 0 } , (5b) with M ∈ S m + n . V ariable τ is a “timer” that ensures that the reset times, denoted by t 0 , t 1 , . . . satisfy t i +1 − t i ≥ δ for all i = 0 , 1 , . . . and solutions in the sense of [17] are well-defined. W e associate with R in (4) a base linear system (BLS) gi ven by the tuple ( A, B , C , D ) , i.e., an L TI system as in (1) without resets (and timer). W e denote this system by R BLS . As we will show , certain reset systems inherit structural properties from the SG of their underlying BLS. B. SGs for L TI systems Before connecting reset SGs to their BLS, we require some additional results for L TI systems. Lemma 1 ( [14]): Consider an L TI system H of the form (1) and assume that A is Hurwitz. Let Θ(Π) = C D 0 I n ⊤ (Π ⊗ I n ) C D 0 I n , (6) with Π ∈ S 2 and det(Π) < 0 , and where ⊗ is the Kronecker product. Define the region S (Π) as S (Π) = ( z ∈ C | ¯ z 1 ⊤ Π z 1 ≥ 0 ) . (7) If there exists a matrix P ∈ S m that satisfies the LMI A ⊤ P + P A P B B ⊤ P 0 − Θ(Π) ⪯ 0 , (8) 1 The SG of a system H is said to satisfy the chord property if, for each z ∈ SG ( H ) , λz + (1 − λ ) ¯ z ∈ SG ( H ) with λ ∈ [0 , 1] , see [13]. then SG ( H ) ⊂ S (Π) . If P ∈ S m ⪰ 0 , then SG e ( H ) ⊂ S (Π) . □ Lemma 1 provides an algorithmic way for computing ov er- approximations S (Π) in (7) of SG ( H ) and SG e ( H ) . These ov er-approximations are characterized by the matrix Π , for which a parametrization is suggested in [14] as Π( σ, λ, r ) = σ 1 − λ − λ λ 2 − r 2 , (9) with σ ∈ {− 1 , +1 } , λ ∈ Λ ⊆ R , and r > 0 . Note that det(Π( σ, λ, r )) = − r 2 < 0 , and S (Π( − 1 , λ, r )) is the interior of a disk in the complex plane centered at λ with radius r , and S (Π(+1 , λ, r )) is the exterior of such a disk. T aking intersections of these regions, we find from applica- tion of Lemma 1 the SG over -approximations SG ( H ) ⊆ \ Π ∈ Π ( H, Λ) S (Π) , and SG e ( H ) ⊆ \ Π ∈ Π ⪰ 0 ( H, Λ) S (Π) (10) for all Λ ⊂ R , where Π ( H , Λ) = { Π in (9) | λ ∈ Λ , σ ∈ {− 1 , +1 } , r > 0 , ∃ P ∈ S m satisfying (8) } , (11) and Π ⪰ 0 ( H , Λ) = { Π in (9) | λ ∈ Λ , σ ∈ {− 1 , +1 } , r > 0 , ∃ P ∈ S m ⪰ 0 satisfying (8) . (12) It follows from [14, Theorem 12] that when Λ = R , the first inclusion in (10) reduces to an equality for the closure of the SG of normal, controllable L TI systems. For further details on computational aspects, the reader is referred to [14]. C . Proper ties inher ited from base linear SGs W e will now work toward our main result: connecting the SG of a reset system in (4) to that of its BLS. T o this end, we first introduce the concept of a patched set, needed to formalize the notion of one SG being bounded by another SG. Definition 3: Let S ⊆ C ∞ be closed and bounded. Then, patc h( S ) = S ∪ ( S c \ ( S c ) ∞ ) . (13) Intuitiv ely , in the context of soft and hard SGs, the patch of a set in Definition 3 serves to define a “filled” SG that keeps non-conv exities of the SG’ s outer shape. An example of SG ( H ) and patc h( SG ( H )) is sho wn in Fig. 2. W e next state the main theorem of this section, linking the SG of a reset system to the SG of its BLS. Fig. 2 : Left: SG (blue) and patch ( SG ) (hatched region). Right: ( SG c ) ∞ (yellow) and ( SG c \ ( SG c ) ∞ ) (red). Theor em 2: Consider the reset system R in (4), with a base linear system R BLS that is normal, A Hurwitz and ( A, B ) controllable. Suppose that for each P ∈ P ( R BLS , R ) with P ( H , Λ) = P ∈ S m ⪰ 0 | ∃ Π ∈ Π ⪰ 0 ( H , Λ) satisfying (8) , there exists ρ ≥ 0 so that the reset map R satisfies P 0 R ⊤ P 1 / 2 0 0 0 P 1 / 2 R 0 0 + ρM 0 0 I m ⪰ 0 . (14) Then, the following inclusions hold: SG ( R ) ⊆ patch ( SG ( R BLS )) , SG e ( R ) ⊆ patch ( SG ( R BLS )) . The proof of Theorem 2 is provided in the Appendix. Cor ollary 1: The inclusions in Theorem 2 hold true for any reset system of the form (4) with A Hurwitz, ( A, B ) controllable, and R = αI , α ∈ [ − 1 , 1] . Pr oof: T ake a Schur complement of (14). Choose ρ = 0 . The upper-left corner of the resulting matrix reduces to ( α 2 − 1) P . Since P ⪰ 0 and α 2 − 1 ≤ 0 , (14) is satisfied. W e remark that for reset systems with reset maps as in Corollary 1, patch ( SG ( R B LS )) can be obtained without the need to solve LMIs. As SG ( R B LS ) can be directly constructed from its transfer function, see, e.g., [13], and patch ( SG ( R B LS )) is graphically intuitive to construct. Fur- thermore, M can be freely chosen to optimize for performance. The results in Theorem 2 and Corollary 1 rev eal that certain reset systems inherit key properties of their BLS, in terms of their scaled graphs. These results, in particular Corollary 1, are a generalization of [9, Proposition 1] which shows that a reset system with R = 0 is input/output/strictly passive, if its BLS is input/output/strictly passive. The reset map structure considered in Corollary 1 captures many known reset elements found in the literature such as first-order reset element (FORE) [10], and partial reset compensator [5], [9]. In [9, Proposition 2] passivity inheritance from the BLS was shown to also extend to reset systems with R = 0 , provided that a condition akin to (14) holds. In the remainder , we refer to reset systems in (4) having a base linear system R BLS with A Hurwitz, ( A, B ) controllable, and R, M satisfying (14), as admissible reset systems . I V . S TAB I L I T Y A N A L Y S I S A N D D E S I G N A. Conditions f or stability W e present a simple stability test for a (nonlinear) feedback system containing an admissible reset element. Theor em 3: Consider the feedback interconnection Σ in Fig. 1, with H 1 a causal, stable system, and H 2 an admissible reset system R with associated BLS R BLS . Suppose the interconnection of H 1 and µ R is well-posed for all µ ∈ (0 , 1] . If there exists r > 0 such that for all µ ∈ (0 , 1] , dist ( SG † ( − H 1 ) , patch ( SG ( µ R BLS ))) ≥ r , (15) then Σ is stable. If, in addition, SG ( H 1 ) or patch ( SG ( R BLS )) or both satisfy the chord property , then ∥ Σ ∥ ≤ 1 /r . □ Pr oof: Since R is an admissible reset system, Theorem 2 applies and thus SG ( R ) ⊆ patch ( SG ( R BLS )) . The result then follows from applying Theorem 1. W e make the follo wing remarks on Theorem 3: 1) As for Theorem 1, a version of Theorem 3 can be for- mulated with SG † e ( − H 1 ) , allowing for , e.g., integrators. 2) When H 1 is L TI, Theorem 3 shows that the closed-loop reset system is stable if the simpler underlying closed- loop L TI system is stable according to SG analysis. 3) In (15), patch ( SG ( R BLS )) can be replaced by its ov er- approximation T Π ∈ Π ⪰ 0 ( R BLS , Λ) S (Π) with Λ containing a finite number of points. 4) The conditions in Theorem 3 are independent of M and δ , and pose limited structure on R . This is in contrast with frequency-domain results such as the circle-criterion [4] and the H β -condition [6], where the structure of M and R is exploited. In the circle-criterion, M represents a sector , while R = 0 is key for the H β -condition. B. Design for stability W e e xploit the analysis conditions in Theorem 3 in a procedure to design a reset controller that stabilizes the loop in Fig. 1 (with H 1 the plant, and H 2 = R the reset controller). W e assume that either SG ( H 1 ) or SG e ( H 1 ) (or both) are gi ven. Step 1: Design a base L TI controller with transfer function R BLS ( s ) = C ( sI − A ) − 1 B + D that satisfies (15). Step 2: Choose Λ and obtain an ov er-approximation of patch ( SG ( R BLS )) by solving (8) for each λ ∈ Λ ; collect all corresponding matrices P in P ( R BLS , Λ) . Step 3: Solve (14) for all P ∈ P ( R BLS , Λ) with common decision variables ρ , R and M . The above steps lead to an admissible reset controller R = ( A, B , C, D , R, M , δ ) , where δ ≥ 0 can be picked arbitrary , that satisfies the conditions of Theorem 3 and thus results in a stable closed-loop design. W e highlight the follo wing points: 1) Design of the BLS in Step 1 can be done via, e.g., loop-shaping [18]. For example, lead filters can rotate SG ( R BLS ) to the right half complex plane, and a propor- tional gain can scale SG ( R BLS ) to an appropriate size. 2) The choice for Λ in Step 2 determines the accuracy of the over -approximation of patch( SG ( R BLS )) . 3) The reset structure is synthesized in Step 3 . In (14), structure can be giv en to R and M . For example, partial resetting can be enforced via, e.g., R = diag ( R 11 , I m − p ) , with R 11 a free matrix. The structure of M for the single- input single-output case can, for example, be fixed to M = C D 0 I n ⊤ − k 1 1 1 k 2 C D 0 I n (16) with k 1 > k 2 , which induces a conic partition of the input-output space of a reset controller . V . E X A M P L E Consider the negati ve feedback interconnection in Fig. 1 where H 1 is an L TI system with transfer function H 1 ( s ) = 1 / ( s ( s + 0 . 2)) describing a moving mass with friction, and H 2 a to-be-designed reset controller . Note that H 1 contains an integrator and maps L 2 e to L 2 e . Follo wing Step 1 , we design R BLS ( s ) = (0 . 055 / ( s 2 + 1 s + 1)) + 0 . 1 to satisfy (15), see Fig. 3 (left). From Step 2 we obtain P ( R BLS , Λ) with Λ = {− 1 , − 1 . 01 , . . . , 1 } . For Step 3 , we consider R a free variable and let M be as in (16). W e iterate over k 1 and set k 2 = 0 . This results in combinations ( R , k 1 ) that satisfy (14), which offers a parameter space that we can explore for performance with stability guaranteed. W e run closed-loop simulations for all feasible ( R , k 1 ) and select the pair that minimizes ∥ u 1 ∥ in response to a step input w , resulting in R = 0 and k 1 = 6 . 2 . Step-responses of both the BLS and reset control system are shown in Fig. 3 (right). Overshoot and settling time are reduced, illustrating the potential of our design procedure. Fig. 3 : Left: SG † e ( − H 1 ) (grey) and SG ( R BLS ) (blue). Right: step-response y 1 of BLS (black) and reset system (red). V I . C O N C L U S I O N S W e established that a broad class of reset control systems inherit scaled graph properties from their base linear system, i.e., the underlying linear system without resets. This result is exploited for the analysis and design of closed-loop reset con- trol systems with (and without) time-regularization. Due to this key result, closed-loop stability analysis reduces to verifying scaled graph properties of the base linear system, and design in volv es shaping the base linear controller characteristics. The results in this paper pro vide ne w possibilities and tools in loop- shaping techniques for reset control design. A P P E N D I X : P R O O F O F T H E O R E M 2 Let H denote a normal L TI system as in (1) with A Hurwitz and ( A, B ) controllable. By definition of patch( SG ( H )) , we hav e to show that SG ( H ) ∪ ( SG ( H )) c \ (( SG ( H )) c ) ∞ = \ Π ∈ Π ⪰ 0 ( H, R ) S (Π) , which is well defined, since H is bounded and thus SG ( H ) is bounded. First, recall from [14, Theorem 12] the equality SG ( H ) = \ Π ∈ Π ( H, R ) S (Π) , (17) with S (Π) in (7) and Π ( H , R ) in (9). Next, we will make a decomposition of SG ( H ) based on regions characterized by matrices Π ∈ Π ( H , R ) with specific properties. W e consider two cases: Π ∈ Π ( H, R ) with σ = − 1 (i.e., Π describes the interior of a disk) and Π ∈ Π ( H , R ) with σ = +1 (i.e., Π describes the exterior of a disk). Case 1: Π ∈ Π ( H , R ) with σ = − 1 . In this case, it follows that (8) implies A ⊤ P + P A + C ⊤ C ⪯ 0 , which, since C ⊤ C ⪰ 0 , implies A ⊤ P + P A ⪯ 0 . Since, A is Hurwitz, it follows that P ⪰ 0 . Therefore, those Π ∈ Π ( H, R ) with σ = − 1 belong to Π ⪰ 0 ( H , R ) . W e collect these matrices in the set Σ − 1 ⪰ 0 ( H ) := { Π ∈ Π ( H , R ) | σ = − 1 } , (18) and define the corresponding region S 1 ( H ) = \ Π ∈ Σ − 1 ⪰ 0 ( H ) S (Π) . (19) Case 2: Π ∈ Π ( H , R ) with σ = +1 . In this case, (8) implies A ⊤ P + P A − C ⊤ C P B − C ⊤ ( D − λI ) B ⊤ P − ( D − λI ) ⊤ C F ⪯ 0 , (20) with F = − ( D − λI ) ⊤ ( D − λI ) + r 2 I . Since r > 0 , F ⪯ 0 implies ( D − λI ) ⊤ ( D − λI ) ≻ 0 and thus the matrix D − λI is non-singular . T aking the Schur complement of (20) (dropping r 2 I ≻ 0 in the left-hand side of (20)) leads to A ⊤ P + P A − C ⊤ C + V W − 1 V ⊤ ⪯ 0 , (21) where V = P B − C ⊤ ( D − λI ) and W = ( D − λI ) ⊤ ( D − λI ) . W e then ha ve − C ⊤ C + V W − 1 V ⊤ = P B W − 1 B ⊤ P − He ( P B ( D − λI ) − 1 C ) , where He ( M ) := M + M ⊤ , and we hav e used M ( M ⊤ M ) − 1 M ⊤ = I for any square and inv ertible M . Since W − 1 ≻ 0 , we find P B W − 1 B ⊤ P ⪰ 0 such that (21) implies X ⊤ P + P X ⪯ 0 , (22) with X = A − B ( D − λI ) − 1 C . For λ = 0 , X can be regarded as the system matrix that arises when applying the feedback u = 1 λ y to the L TI system ˙ x = Ax + B u , y = C x + D u . The case λ → 0 can be interpreted as the limit of high- gain feedback, where the gain 1 λ → ±∞ . Using this feedback perspectiv e, the closed-loop system dynamics read ˙ x = X x = ( A − 1 λ B ( − 1 λ D + I ) − 1 C ) x . Hence, when X is Hurwitz, (22) implies P ⪰ 0 . Next, we find those λ for which this is true. Using the pre vious perspecti ve and the fact that A is Hur - witz, it follo ws from the generalized Nyquist criterion [18] that X is Hurwitz if and only if det( − 1 λ H ( s ) + I ) = 0 and does not encircle the origin, where H ( s ) = C ( sI − A ) − 1 B + D . This is equiv alent to requiring the characteristic loci of H ( s ) to not pass through nor encircle the point λ + 0 j . Note that the characteristic loci correspond to the spectrum ρ ( H ) defined as ρ ( H ) = [ s ∈ R ∪{∞} n α ∈ C | det lim ω → s H ( j ω ) − αI = 0 , ω ∈ R o , which is bounded since H is stable. Furthermore, it holds that SG ( H ) ∩ R = ρ ( H ) ∩ R , which follows from hyperbolic con ve xity of SG ( H ) , see [13]. Therefore, the critical points for stability are p 0 := min { ρ ( H ) ∩ R } and p 1 := max { ρ ( H ) ∩ R } . Suppose λ < 0 . In that case stability requires − p 0 /λ > − 1 , leading to p 0 > λ . F or λ > 0 we need − p 1 /λ > − 1 , leading to p 1 < λ . Note that for λ = 0 , we have 1 λ → ±∞ , so that X is Hurwitz if p 0 > 0 (i.e., H has infinite positi ve gain margin) or p 1 < 0 (i.e., H has infinite negati ve gain margin). Let Λ := [ p 0 , p 1 ] . Then, X is Hurwitz for all λ ∈ R \ Λ , and, therefore, (22) implies P ⪰ 0 . Thus, those Π ∈ Π ( H, R ) with σ = +1 and λ ∈ R \ Λ also belong to Π ⪰ 0 ( H , R ) . In the case that λ ∈ Λ , X is not Hurwitz, and thus (22) does not directly imply anything on P . Howe ver , we can exclude P ⪰ 0 using the follo wing argument by contradiction. First, we note the follo wing. T ake y ∈ C n = 0 such that y H ( X ⊤ P + P X ) y = 0 , (23) with y H the hermitian transpose. W e have y H ( A ⊤ P + P A ) y − y ⊤ He ( P B ( D − λI ) − 1 C ) y = 0 . (24) V ia (21) we find y H P B W − 1 B ⊤ P y ≤ 0 . Since W − 1 ≻ 0 this yields y H P B W − 1 B ⊤ P y = 0 and B ⊤ P y = 0 . W e then hav e y H ( A ⊤ P + P A − C ⊤ C ) y = − y H V W − 1 V ⊤ y . Now consider (20) and pre- and post multiply with [ y ⊤ , z ⊤ ] ⊤ with z ∈ C m arbitrary . Using V = P B − Q ⊤ , with Q := ( D − λI ) ⊤ C and B ⊤ P y = 0 , we find − y H Q H W − 1 Qy − 2 y H Q ⊤ z − z H W z + r 2 z H z ≤ 0 . (25) Choose z = − W − 1 Qy such that the abov e inequality reduces to r 2 z H z ≤ 0 , which implies z = 0 . Since the matrix D − λI is inv ertible, it follo ws that z = 0 ⇔ C y = 0 . In summary: y H ( X ⊤ P + P X ) y = 0 = ⇒ C y = 0 . Next, let X hav e non-zero eigen values, and let (22) hold. Assume P ⪰ 0 . Let v = 0 be an eigenv ector of X such that X v = av with Re { a } > 0 . Then, we have v H P v ≥ 0 and 2 Re { a } v H P v ≤ 0 , (26) where the second inequality follows from (22). Since Re { a } > 0 it follows that v H P v = 0 . This implies v H ( X ⊤ P + P X ) v = 0 , and thus, as shown previously C v = 0 . Recall that X = A − B ( D − λI ) − 1 C . Then X v = Av = av , which implies that v is an eigenv ector of A corresponding to the unstable eigen v alue a . Since A is Hurwitz this is a contradiction and our assumptions must be false: either (20) does not ha ve a solution, or if (20) admits a solution, P ⪰ 0 can not be true. Next, suppose X has zero eigen values. Then, X v = 0 , and thus v H ( X ⊤ P + P X ) v = 0 , which implies C v = 0 . Howe ver , X v = 0 = Av contradicts the fact that A is Hurwitz. Hence, in this case (20) can not admit a feasible solution. Thus, for λ ∈ Λ the matrix X is not Hurwitz, and any P satisfying (20) cannot be positive semi-definite. Next, we collect the Π matrices for σ = +1 , in the sets Σ +1 ⪰ 0 ( H ) := { Π ∈ Π ( H , R \ Λ) | σ = +1 } (27a) Σ +1 × ( H ) := { Π ∈ Π ( H , Λ) | σ = +1 , } , (27b) and define the corresponding regions S 2 ( H ) = \ Π ∈ Σ +1 ⪰ 0 ( H ) S (Π) and S 3 ( H ) = \ Π ∈ Σ +1 × ( H ) S (Π) . Since Σ − 1 ⪰ 0 ( H ) ∪ Σ +1 ⪰ 0 ( H ) ∪ Σ +1 × ( H ) = Π ( H , R ) , it follows from (17) that SG ( H ) = S 1 ( H ) ∩ S 2 ( H ) ∩ S 3 ( H ) . (28) Using De Morgan’ s law we then find SG ( H ) c = S 1 ( H ) c ∪ S 2 ( H ) c ∪ S 3 ( H ) c . Clearly , S 1 ( H ) is a bounded set as it results from taking intersections, with at least one bounded disk with radius ∥ H ∥ . This directly implies that S 1 ( H ) c is unbounded. Both S 2 ( H ) and S 3 ( H ) are unbounded sets, since { z ∈ C | p 0 ≤ Re ( z ) ≤ p 1 } ⊂ S 2 ( H ) and R \ Λ ⊂ S 3 ( H ) . Furthermore, S 2 ( H ) c is unbounded, as it results from the union of disks centered at λ ∈ R \ Λ , which is unbounded. S 3 ( H ) c results from the union of disks centered at λ ∈ Λ , which, since Λ is bounded and S 3 ( H ) c being bounded by the spectrum ρ ( H ) implies that S 3 ( H ) c is bounded. Thus, ( SG ( H ) c ) ∞ = S 1 ( H ) c ∪ S 2 ( H ) c . W e then find patc h( SG ( H )) = ( S 1 ( H ) ∩ S 2 ( H ) ∩ S 3 ( H )) ∪ S 3 ( H ) c = S 1 ( H ) ∩ S 2 ( H ) , where we used S 3 ( H ) c ⊆ S 1 ( H ) ∩ S 2 ( H ) , which is evident from the construction of the regions. Since Σ − 1 ⪰ 0 ( H ) ∪ Σ +1 ⪰ 0 ( H ) = Π ⪰ 0 ( H , R ) , it follo ws that patc h( SG ( H )) = S 1 ( H ) ∩ S 2 ( H ) = \ Π ∈ Π ⪰ 0 ( H, R ) S (Π) . (29) Finally , we use [14, Theorem 15] and H = R B LS to conclude SG ( R ) ⊆ \ Π ∈ Π ⪰ 0 ( R BLS , R ) S (Π) and SG e ( R ) ⊆ \ Π ∈ Π ⪰ 0 ( R BLS , R ) S (Π) . Applying the equality in (29) leads to the result. R E F E R E N C E S [1] O. Beker , C. V . Hollot and Y . Chait, “Plant with integrator: an example of reset control overcoming limitations of linear feedback, ”T ransactions on Automatic Control, 46(11), pp. 1797-1799, 2001. [2] G. Zhao, D. Nesic, Y . T an and C. Hua, “Overcoming ov ershoot per - formance limitations of linear systems with reset control, ” Automatica, 101, pp. 27-35, 2019. [3] J. C. Clegg, “ A nonlinear integrator for servomechanisms, ” Transactions of the American Institute of Electrical Engineers, Part II: Applications and Industry , 77(1), pp. 41–42, 1958. [4] S.J.L.M. van Loon, K.G.J. Gruntjens, M.F . Heertjes, N. van de W ouw , and W .P .M.H. Heemels, “Frequency-domain tools for stability analysis of reset control systems, ” Automatica, 82, pp. 101-108, 2017. [5] A.A. Dastjerdi, A. Astolfi, S. H. HosseinNia, “Frequency-domain sta- bility methods for reset control systems, ” Automatica, 148, 2023. [6] O. Beker , C.V . Hollot, Y . Chait and H. Han, “Fundamental properties of reset control systems, ” Automatica, 40(6), pp. 905-915, 2004. [7] J. P . J. Krebbekx, R. T oth and A. Das, “Reset Controller Analysis and Design for Unstable Linear Plants using Scaled Relative Graphs, ” ArXiv:2506.13518, 2025. [8] S. van den Eijnden, T . Chaffey , T . Oomen and W .P .M.H. Heemels, “Scaled graphs for reset control system analysis, ” Europ. Jour . of Control, 80, 2024. [9] J. Carrasco, A. Banos and A. van der Schaft, “ A passivity-based approach to reset control systems stability , ” Sys & Cont Lett, 59(1), pp. 18-24, 2010. [10] D. Nesic, L. Zaccarian, A. R. T eel, “Stability properties of reset systems, ” Automatica, 44(8), pp. 2019-2026, 2008. [11] A. Rantzer , “On the Kalman—Y akubo vich—Popov lemma, ” Systems & Control Letters, 28(1), pp. 7-10, 1996. [12] X. Huang, E. K. Ryu and W . Y in, “Scaled Relative Graph of Normal Matrices, ” ArXi v:2001.02061, 2024. [13] T . Chaffe y , F . Forni and R. Sepulchre, “Graphical Nonlinear System Analysis, ” T rans. on Automatic Control, 68(10), pp. 6067-6081, 2023. [14] T . de Groot, W .P .M.H. Heemels and S. van den Eijnden, “ A Dissipativity Framew ork for Constructing Scaled Graphs”, ArXiv:2507.08411, 2025. [15] Conway , J.B. “Some Fundamental Concepts from Analysis, ” In: Func- tions of One Complex V ariable II. Graduate T exts in Mathematics, vol 159. Springer , New Y ork, NY ., 1995 [16] C. Chen, S. Z. Khong and R. Sepulchre, “Soft and Hard Scaled Relative Graphs for Nonlinear Feedback Stability , ” ArXi v:2504.14407, 2025. [17] W . P . M. H. Heemels, R. Postoyan, P . Bernard, K. J. A. Scheres and R. G. Sanfelice, “Solution Concepts and Existence Results for Hybrid Systems with Continuous-time Inputs, ” ArXiv:2601.11205, 2026. [18] S. Skogestad, and I. Postlethwaite (2005). Multiv ariable Feedback Con- trol: Analysis and Design, 2nd Edition, John Wiley & Sons.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment