Uniform Interpolation in Distributed Knowledge Modal Logics
Uniform interpolation is the property that, for any formula and set of atoms, there exists the strongest consequence omitting those atoms. It plays a central role in knowledge representation and reasoning tasks such as knowledge update and informatio…
Authors: Kexu Wang, Liangda Fang
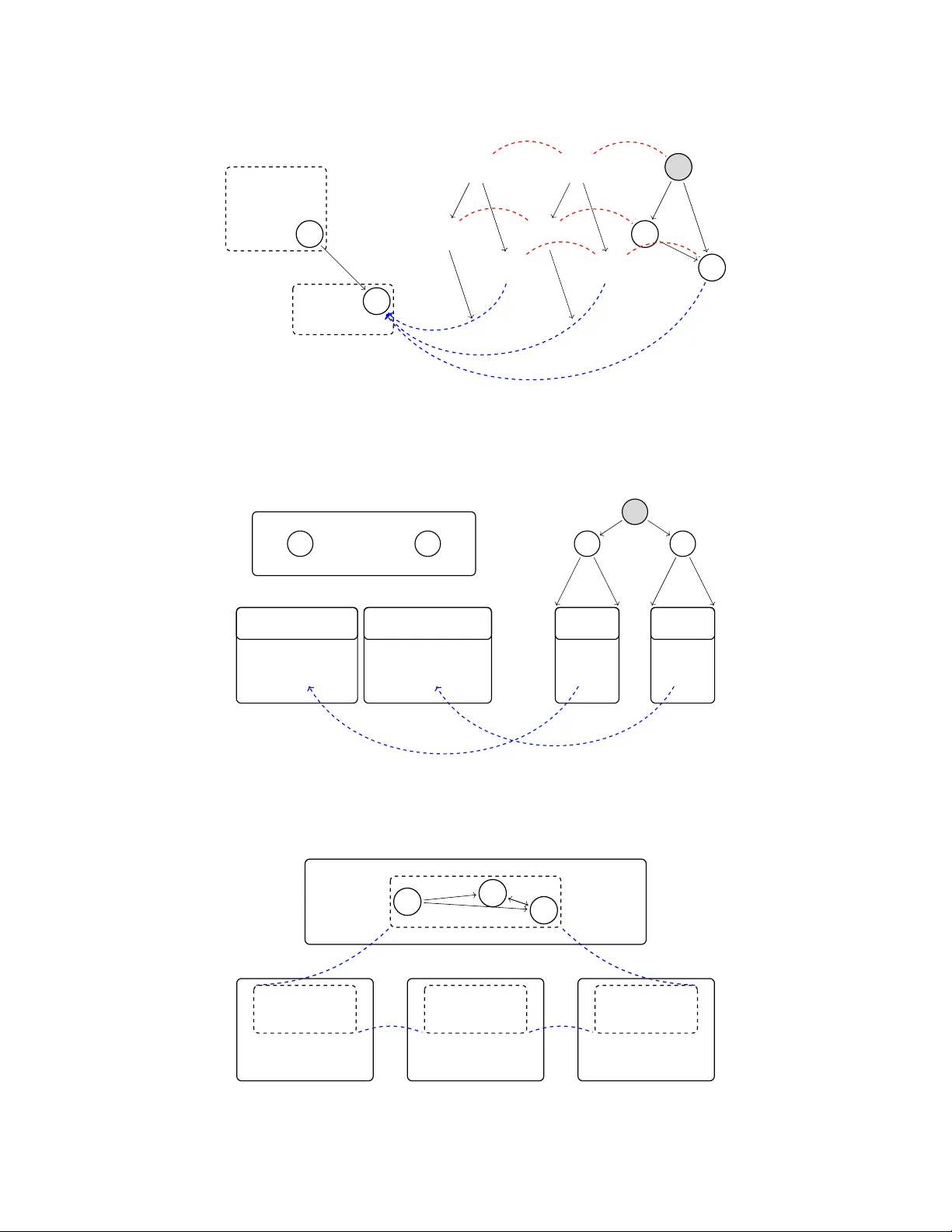
Uniform In terp olation in Distributed Kno wledge Mo dal Logics Kexu W ang Jinan University, Guangzhou, China wangkexuphy@gmail.com Liangda F ang Jinan University, Guangzhou, China fangld@jnu.edu.cn Abstract. Uniform in terp olation is the property that, for any form ula and set of atoms, there exists the strongest consequence omitting those atoms. It plays a cen tral role in kno wledge represen tation and reasoning tasks such as kno wledge update and information hiding. This pap er studies the uniform interpolation prop ert y in epistemic modal logics with distribute d know le dge , which captures agen ts’ collective reasoning abilities. Building on the bisim ulation- quan tier p erspective, w e extend the canonical-form ula and literal-elimination framew ork of F ang, Liu, and v an Ditmarsch to distributed knowledge settings and in tro duce the concept of collectiv e p -bisimulation. W e show that, for distributed knowledge mo dal logics K n D , D n D , and T n D , every satisable canonical form ula’s uniform interpolant omitting an atom p is exactly its remainder of eliminating p . Then, we pro vide a ner analysis for the transitive and Euclidean systems K45 n D , KD45 n D , and S5 n D , and pro ve that every form ula of modal depth k + 1 has a uniform in terp olan t of mo dal depth 2 k + 1 . Thus, we prov e the uniform in terp olation prop ert y in all the six distributed kno wledge modal logics. Finally , we generalize the results to some v ariants with prop ositional common knowledge and discuss the metho d’s limitations. CONTENTS 0 Con ten ts 1 In tro duction 1 2 Preliminaries 3 3 Uniform In terp olation and Syn tactic Metho ds 5 3.1 Uniform interpolation, bisim ulation, and forgetting . . . . . . . . . . . . . . . . . . . 5 3.2 d-canonical formulas and pruning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 3.3 F orgetting as literal elimination . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 4 Uniform In terp olation in K n D, KD n D, and T n D 10 5 Uniform In terp olation in K45 n D, KD45 n D, and S5 n D 13 5.1 δ p ma y not b e the uniform interpolant . . . . . . . . . . . . . . . . . . . . . . . . . . 13 5.2 Uniform interpolation in K45 n D , KD45 n D . . . . . . . . . . . . . . . . . . . . . . . . 14 5.3 Uniform interpolation in S5 n D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 5.4 Sp ecial cases where δ p is a unifor m interpolant . . . . . . . . . . . . . . . . . . . . . 21 6 Uniform In terp olation in Prop ositional Common Kno wledge 22 6.1 Uniform interpolation in K n DPC , D n DPC , T n DPC . . . . . . . . . . . . . . . . . 24 6.2 Uniform interpolation in S5 n DPC . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 6.3 Limitations: K45 n DPC and KD45 n DPC . . . . . . . . . . . . . . . . . . . . . . . . 27 7 Conclusion 28 A The deterred pro ofs 29 1 INTR ODUCTION 1 1 In tro duction A logic has the uniform interp olation prop ert y if for ev ery formula and every set of atoms, there exists a formula that omits those atoms while preserving exactly the same consequences o ver the remaining v o cabulary . This prop ert y is closely tied to prop ositional quantier elimination and forgetting in kno wledge represen tation [EKI19, QLF + 24], and it underpins knowledge up date [L W11, FWQ + 23], information hiding [HO03], and on tology reuses [KS15]. Uniform in terp olation is well understo o d in prop ositional logic and m ulti-agen t epistemic mo dal logics. How ever, its status in the logics with distribute d know le dge —which allow reasoning ab out what a set of agents collectiv ely kno ws—has remained unclear. In this pap er, we inv estigate uniform in terp olation in epistemic mo dal logics with distributed kno wledge. Uniform in terp olation originates in Henkin’s work [Hen63] as a strengthened version of Craig’s in terp olation. While a Craig’s in terp olant dep ends on b oth an an tecedent and a consequen t, a uniform interpolant dep ends only on the anteceden t and the set of atoms to retain, so uniform in terp olation implies Craig’s in terp olation. Ov er the decades, researc h on uniform interpolation has follow ed v arious lines. Researc hers ha ve adopted pro of-theoretic or algebraic techniques, seek- ing constructive pro cedures or algebraic conditions to ensure the uniform interpolation prop erty . Another inuential line of researc h seeks to ensure uniform interpolation through bisimulation quan tiers. It w as indep endently initiated b y Ghilardi and Zaw ado wski [GZ95] and b y Visser [Vis96]. The intuitiv e idea is an extension of the classical bisim ulation: T wo mo dels are p -bisimilar if they are bisimilar except possibly on an atom p . A logic is p -bisim ulation in v ariant if every tw o p -bisimilar mo dels satisfy the same formulas of this logic without p o ccurring. F or every form ula ϕ , we intend to nd a formula ψ without p o ccurring suc h that a model M ′ satises ψ if and only if, there exists a mo del M of ϕ such that M and M ′ are p –bisimilar. This ψ is called a result of forgetting p . Observe that ψ exactly serves as a uniform interpolant of ϕ , and one ma y write ψ in a quan tied form to emphasize that this p -bisimulation behav es lik e an existen tial quantier. This bisim ulation-quantier line of researc h is also what our pap er follows. Historically , all these researc h lines, pro of-theoretic, algebraic, or bisimulation-quan tier, ha ve oered complementary insights and jointly shap ed to day’s understanding of uniform interpola- tion. Pitts [Pit92] gav e the rst syn tactic pro of for in tuitionistic prop ositional logic, follow ed by Sha vruko v’s result for Gödel-Löb logic ( GL ) [Sha93]. Ghilardi [Ghi95] pro vided an algebraic pro of for the basic mo dal logic K . Visser ga ve the bisimulation-quan tier pro ofs for b oth K and GL [Vis96]. While alongside Pitt’s research line, Bílk ov á [Bí07] pro vided a pro of-theoretic proof for uniform in terp olation in K and T . In contrast, K4 and S4 are known to hav e no uniform inter- p olation prop ert y [GZ95, Bí07]. It is notew orthy that K4 and S4 are classic examples that enjoy Craig’s in terp olation but ha ve no uniform interpolation prop erty . W olter [W ol98] sho wed uniform in terp olation in S5 and prop osed a syntactic metho d, the fusion of mo dal logics, whic h preserves the uniform in terp olation prop erty , and it lifts the prop ert y from single-agen t to multi-agen t set- tings. P attinson [Pat13] prov ed that any multi-agen t rank-1 mo dal logics (namely , axiomatized by depth-one formulas, such as K n and D n ) hav e uniform in terp olation. Studer [ Stu09] show ed the failure of uniform interpolation in the logics with common knowledge, K n C and K4 n C , by disprov- ing their Beth property . D’Agostino and Hollen b erg sho wed that µ -calculus, an extension of K with a xed p oint op erator, has uniform interpolation [DH00]. Building on the disjunctive-normal- form technology of Janin and W alukiewicz [JW95], D’Agostino and Lenzi [DL06] rst prop osed the metho d of literal elimination and gav e explicit constructions of uniform in terp olants for disjunc- tiv e µ -calculus. Moss [Mos07] developed the notion of c anonic al formulas , and show ed that every form ula can b e represented as a disjunction of a unique set of canonical form ulas. Then, F ang, Liu, and v an Ditmarsh [FLvD19] prop osed the literal elmination on canonical formulas and sho w ed 1 INTR ODUCTION 2 comprehensiv e bisimulation-quan tier conclusions for m ulti-agent mo dal logics K n , D n , T n , K45 n , KD45 n , and S5 n , as w ell as their prop ositional common knowledge v ersions. In parallel, the non- bisim ulation-quantier lines are also fruitful: Seifan, Sc hrö der, and P attinson [SSP17] prop osed the condition for uniform interpolation in coalgebraic mo dal logics, namely , rank-1 mo dal logics and provided new results more than K and D . Iemho [Iem19] linked the uniform in terp olation prop erty to the existence of sequent calculi. v an der Giessen, Jalali, and Kuznets [vdGJK24] pre- sen ted a new pro of-theoretic result for K , D , T , and S5 by generalized sequen t caculi. [F GGS24] realized the uniform in terp olation pro ofs for K , GL , iSL via the interactiv e theorem pro ver Co q. A stronger v ariant of uniform interpolation, uniform Lyndon interpolation, has been explored recently in in tuitionistic logics [AIJ22, A TIJ24] and in the extensions of K5 [vdGJK23] using proof-theoretic metho ds. Despite this rich dev elopment, an imp ortan t notion in multi-agen t mo dal logic has not b een delved in to, that is, distributed kno wledge. Distributed kno wledge characterizes the agents’ co op eration in m ulti-agent mo dal logic. A new mo dality D B is introduced for every nonempt y set B of agents, which c haracterizes “the agen ts in B collectively know that ... ”, and the in tersection of the relations of agents in B acts as its accessibilit y relation. This op erator is monotone, that is, D B ϕ → D C ϕ if C ⊆ B . The notion of distributed knowledge dates back to Halp ern and Moses’s w ork on distributed systems [HM90]. Then, [FHMV95] provided the conclusions of soundness and completeness for distributed kno wledge mo dal logics. Ho wev er, the classical bisim ulation no longer works in the scenario of distributed knowledge. Ro elofsen [Roe07] in tro duced the concept of c ol le ctive bisimulation that c haracterizes the comparison of mo dels and the expressiveness of distributed knowledge. Then, researc hers hav e also studied how distributed kno wledge interacts with the other agent op erators. W áng and Ågotnes [W Å11] extended public announcement logic with distributed kno wledge. Then, Ågotnes and W áng [Å W17] further dened resolution op erators and axiomatized logics combining distributed knowledge and common kno wledge. Then, Ågotnes, Alec hina, and Galimullin [ÅAG22] studied group-announcemen t op erators in teracting with distributed kno wledge. Apart from the Kripk e semantics, [vDGLR22] and [GKLR23] introduced simplicial semantics for epistemic logic with distributed knowledge and provided their axiomatization. The work [CvDR V23] has further explored distributed knowledge through dynamic and top ological p ersp ectives. On the applied side, distributed kno wledge has b ecome a k ey to ol in m ulti-agent systems: it is used in verication to ols suc h as MCMAS [LQR17] in distributed decision making. Murai and Sano hav e established their proof-theoretic proof for Craig in terp olation in epistemic logics K n , T n , K4 n , and S4 n with dis- tributed kno wledge [MS20], and intuitionistic epistemic logics extended with distributed knowledge are also developed [SMS21, MS22]. How ev er, the work of Murai and Sano leav es the cases of the distributed knowledge K45 n , KD45 n , S5 n op en. As a strengthened prop ert y , uniform in terp olation in distributed knowledge mo dal logics has also remained an op en problem — a gap this pap er aims to address. This pap er’s most closely related work is b y F ang, Liu, and v an Ditmarsch [FLvD19], who, alongside the bisim ulation-quantier line, pro v ed the closure under forgetting, and hence, the uni- form interpolation prop erty , for a broad family of mo dal systems K n , D n , T n , K45 n , KD45 n , and S5 n . Since every form ula can b e represented as the disjunction of a unique set of canonical for- m ulas, and forgetting is closed under disjunction, they reduce the problem to nding the canonical form ulas’ results of forgetting (uniform interpolants). They prop osed the literal elimination of canonical formulas, and through the bismulation-based mo del construction, they prov ed that for eac h canonical formula δ , its remainder δ p of eliminating a literal p is exactly a result of forgetting p (uniform in terp olant). Thus, uniform interpolation is pro ved. W e extend these tec hniques to the distributed kno wledge settings, and then obtain the analogous uniform in terp olation results for the corresponding distributed knowledge extensions: K n D , D n D , and T n D . How ever, the dis- 2 PRELIMINARIES 3 tributed kno wledge extensions K45 n D , KD45 n D , and S5 n D are more complicated. Distributed kno wledge op erators require the inclusion relations b etw een sets of agen ts, and the mo dels of the latter three logics are b oth transitive and Euclidean, which mak es the bisim ulation-based mo del construction rather challenging. W e show some canonical form ulas in the latter three logics whose uniform in terp olan ts are ine quivalent to their remainders of literal elimination. Thence, w e rene the bisimulation-based mo del construction. The key notion is to combine the mo del construction with op erating on canonical formulas’ mo dal depth (pruning). W e prov e that for ev ery canonical form ula δ of depth k + 1 , its uniform interpolant is constructed as the disjunction of all the remain- ders of those (2 k + 1) -depth canonical formulas that en tail δ . This means every form ula of depth k + 1 has a uniform in terp olan t of depth at least 2 k + 1 . Hence, uniform in terp olation in K45 n D , KD45 n D , and S5 n D is p ro ved. The con tributions of our pap er are summarized as follo ws: • W e introduce collective p -bisimulation as a combination of collective bisimulation and bisim- ulation quan tiers, and show its adequacy lemma, which means these logics that w e discuss are collective- p -bisim ulation inv ariant. (Subsection 3.1) • W e introduce distributed knowledge canonical formulas and prov e each formula is equiv alent to the disjunction of a unique set of suc h canonical formulas. W e also extend the denitions of pruning and literal elimination to the case of distributed knowledge canonical formulas. (Subsection 3.2 & 3.3) • W e show that in K n D , D n D , and T n D , ev ery canonical formula’s uniform in terp olan t is equiv alen t to its remainder of literal elimination (Lemmas 4.1 & 4.3), and th us prov e the uniform interpolation prop ert y in the three logics (Theorem 4.4). • W e prov e the uniform interpolation prop ert y in K45 n D , KD45 n D (Theorem 5.13), and S5 n D (Theorem 5.13) b y combining bisimulation-based mo del construction with pruning (Lem- mas 5.11 & 5.14) and constructing uniform interpolants for distributed canonical formulas (Lemmas 5.12 & 5.15). W e also analyze cases where the uniform interpolant is equiv alent (Subsection 5.4) or inequiv alen t (Subsection 5.1) to the remainder of literal elimination. • W e extend the tec hniques to the versions augmen ted with prop ositional common knowledge, ho wev er, except for K45 n DPC and KD45 n DPC (Section 6). The pap er is organized as follows. Section 2 gives preliminaries. Section 3 denes collectiv e p - bisim ulation and pro vides syn tactic metho ds, including distributed kno wledge canonical formulas, literal elimination, etc. Section 4 prov es the uniform in terp olation property in K n D , D n D , and T n D . Section 5 prov es the uniform in terp olation prop ert y in K45 n D , KD45 n D , and S5 n D . Section 6 discusses the results ab out the prop ositional common kno wledge v ersions. Section 7 concludes this pap er. F ull proofs app ear in the app endix. 2 Preliminaries Let’s x A to be the set of n agents. The lo wercase letter i, j range o ver agents while the calligraphic letters B , C , D , X range ov er nonempt y subsets of A . The function P + ( · ) indicates the nonempty subset of a giv en set, for example, P + ( A ) as all the nonempt y subsets of A . F or ev ery set of agen ts B , its complemen t B c = A \ B . Let’s x the calligraphic letter P to b e the coun table set of all the atoms (or propositional letters). A liter al is an atom p (p ositive literal) or its negation ¬ p (negative literal). Given a nite 2 PRELIMINARIES 4 subset P ⊆ P , a minterm of P is a conjunction of literals that uses only the members of P and where each atom in P o ccurs exactly once. Denition 2.1. The language L D C is generated b y BNF: ϕ ::= p | ¬ ϕ | ϕ ∧ ϕ | ϕ ∨ ϕ | K i ϕ | D B ϕ | C ϕ for every p ∈ P , i ∈ A , and B ∈ P + ( A ) . If for ev ery formula in the form C ϕ , ϕ is restricted to b e prop ositional, we denote the language by L D PC . If the formulas in the form C ϕ are absent, w e denote the language b y L D . Giv en nite P ⊆ P , we sa y a formula ϕ is ov er P if ev ery atom o ccurring in ϕ b elongs to P ; con versely , denote the atoms o ccurring in ϕ by P ( ϕ ) . Let ⊤ and ⊥ b e true and false, resp ectiv ely . The upp ercase letters Φ and Ψ range ov er nite sets of form ulas. The duals, ˆ K i , ˆ D B , and ˆ C , are the short forms of “ ¬ K i ¬ ”, “ ¬ D B ¬ ”, and “ ¬ C ¬ ”, resp ectively . The mo dal depth of a formula ϕ , denoted by dep ( ϕ ) , is the depth of nesting of mo dal operators in ϕ . Denition 2.2. A fr ame is a pair ( S, R ) , where • S is a nonempt y set of p ossible w orlds; • R is a function that maps eac h agent i ∈ A to a binary relation R i ⊆ S × S , called the ac c essibility r elation for i . A K ripke mo del is a triple M = ( S, R, V ) , where ( S , R ) is a frame and • V : S → P ( P ) is a v aluation map. A p ointe d (K ripke) mo del is a pair ( M , s ) , where M is a Kripke mo del and s ∈ S , called the actual w orld. Giv en a mo del M , for each world t , let R i ( t ) = { u | ( t, u ) ∈ R i } , which are called i -suc c essors of t . F or B ∈ P + ( A ) , denote R B = i ∈B R i . Th us, B -successors of t , R B ( t ) , is similarly dened. F urthermore, for any p ossible relation R x in our discussion, let R − 1 x = { ( u, t ) | ( t, u ) ∈ R x } ; let TC ( t, R x ) b e the smallest set satisfying • R x ( t ) ⊆ TC ( t, R x ) , • for ev ery u ∈ TC ( t, R x ) and v ∈ R x ( u ) , we ha ve v ∈ TC ( t, R x ) . Note that TC ( t, R x ) is the set of the worlds reachable from t via R x , or in other w ords, the image of t under the transitive closure of R x . Let R TC ( t, R x ) = TC ( t, R x ) ∪ { t } . R TC ( t, R x ) is the image of t under the reexive-transitiv e closure of R x . P articularly , when R x is i ∈A R i , let’s write R TC ( t ) and TC ( t ) instead, the latter of whic h is all the w orlds that are reachable from t . Denition 2.3. Let ( M , s ) = ( S, R, V , s ) b e a p ointed mo del. The satisfaction relation for L D C is inductiv ely dened as follows: • M , s ⊨ p i p ∈ V ( s ) ; • M , s ⊨ ¬ ϕ i M , s ⊨ ϕ ; • M , s ⊨ ϕ ∧ ψ i M , s ⊨ ϕ and M , s ⊨ ψ ; • M , s ⊨ ϕ ∨ ψ i M , s ⊨ ϕ or M , s ⊨ ψ ; 3 UNIF ORM INTERPOLA TION AND SYNT ACTIC METHODS 5 K D T K45 KD45 S5 serial √ √ √ √ reexiv e √ √ transitiv e √ √ √ Euclidean √ √ √ T able 1: Systems and an y accessibilit y relation R i • M , s ⊨ K i ϕ i for ev ery t ∈ R i ( s ) , M , t ⊨ ϕ ; • M , s ⊨ D B ϕ i for ev ery t ∈ R B ( s ) , M , t ⊨ ϕ ; • M , s ⊨ C ϕ i for every t ∈ TC ( s ) , M , t ⊨ ϕ ; Observ e that for every i ∈ A , M , s ⊨ D { i } ϕ if and only if M , s ⊨ K i ϕ . Therefore, w e tak e the mo dalities K i and D { i } the same thing. The axioms and mo dal systems of K , D , T , K45 , KD45 , and S5 are well-kno wn; if L is any of the six system, then “ L n ” refers to the case of n agen ts, where n = |A| , “ L n D ” the case with distributed kno wledge, and “ L n DPC ” the case with b oth distributed knowledge and prop ositional common kno wledge. Readers can turn to the b o ok [FHMV95] for more information of these systems, lik e soundness and completeness. W e still denote an y system ab ov e by L . A mo del is an L -model, if it satises all the tautologies of the system L . A formula ϕ is L -satisable, if there exists an L -mo del ( M , s ) such that M , s ⊨ ϕ . W e write ϕ ⊨ L ψ if for every L -mo del ( M , s ) , if M , s ⊨ ϕ then M , s ⊨ ψ . W e write ϕ ≡ L ψ if both ϕ ⊨ L ψ and ψ ⊨ L ϕ . 3 Uniform In terp olation and Syn tactic Metho ds In this section, w e will give the denitions of uniform interpolation and collective p -bisim ulation, and thus extend the syn tactic metho ds in [FLvD19] to the distributed kno wledge case, and discuss their prop erties. 3.1 Uniform in terp olation, bisim ulation, and forgetting Denition 3.1 (Uniform In terp olation) . A mo dal system L has the uniform interp olation pr op erty , if for every P , ev ery L -satiable ϕ o ver P , and every p ∈ P , there is an L -satiable formula ψ o ver P \ { p } such that for ev ery formula χ without p o ccurring, ϕ ⊨ L χ ⇐ ⇒ ψ ⊨ L χ. W e call ψ a uniform in terp olant of ϕ in L ov er P \ { p } . Ro elofsen extends the concept of bisimulation to collectiv e bisimulation as a sucien t condition of t wo mo dels satisfying the same distributed knowledge form ulas [Ro e07]. W e can extend the concept of collective bisimulation to collectiv e p -bisim ulation, which describ es the similarity of tw o mo dels ignoring the v aluation on p . Denition 3.2 (Collective p -Bisim ulation) . Let ( M , s ) and ( M ′ , s ′ ) b e t wo pointed mo dels where M = ( S, R, V ) and M ′ = ( S ′ , R ′ , V ′ ) . Let p ∈ P . A c ol le ctive p -bisimulation b etw een ( M , s ) and ( M ′ , s ′ ) is a relation ρ ⊆ S × S ′ suc h that ( s, s ′ ) ∈ ρ and for C ∈ P + ( A ) , u ∈ S , and u ′ ∈ S ′ , if ( u, u ′ ) ∈ ρ , then the following hold: 3 UNIF ORM INTERPOLA TION AND SYNT ACTIC METHODS 6 • Atoms : V ( u ) ∼ p V ′ ( u ′ ) , that is, for every q ∈ P \ { p } , q ∈ V ( u ) if and only if q ∈ V ′ ( u ′ ) ; • F orth : F or ev ery v ∈ R C ( u ) , there exists v ′ ∈ R ′ C ( u ′ ) such that ( v , v ′ ) ∈ ρ ; • Back : F or ev ery v ′ ∈ R ′ C ( u ′ ) , there exists v ∈ R C ( u ) such that ( v , v ′ ) ∈ ρ . If this relation ρ exists, w e say the tw o mo dels are collectively p -bisimilar, or ρ witnesses the collectiv e p -bisim ulation betw een ( M , s ) and ( M ′ , s ′ ) , denoted b y ρ : ( M , s ) ↔ col p ( M ′ , s ′ ) . If we replace the Atoms condition with “ V ( u ) = V ′ ( u ′ ) ”, this denition b ecomes that of col- lectiv e bisim ulation. Naturally , we can consider the adequacy lemma of collectiv e p -bisim ulation w.r.t L D C , which means that L D C is collective- p -bisim ulation inv ariant. Lemma 3.3 (the A dequacy Lemma of Collective p -Bisim ulation) . Let ( M , s ) and ( M ′ , s ′ ) b e tw o mo dels, p ∈ P , and ϕ b e an y L D C form ula without p o ccurring. If ( M , s ) ↔ col p ( M ′ , s ′ ) , then M , s ⊨ ϕ ⇐ ⇒ M ′ , s ′ ⊨ ϕ . With the help of collectiv e p -bisimulation, another important concept, forgetting, is introduced as follo ws. F orgetting is the semantic counterpart of uniform in terp olation. The results of forgetting can act as uniform interpolants. Denition 3.4 (F orgetting) . Consider the con text of a mo dal system L . Let ϕ ∈ L D C and p an atom. A formula ψ satisfying that P ( ψ ) ⊆ P ( ϕ ) \{ p } is a result of forgetting p in ϕ , written as d f or g et L ( ϕ, p ) ≡ L ψ , if the following conditions hold, • F orth : F or any L -mo dels ( M , s ) and ( M ′ , s ′ ) , if M , s ⊨ ϕ and ( M , s ) ↔ col p ( M ′ , s ′ ) , then M ′ , s ′ ⊨ ψ ; • Back : F or any L -mo del ( M ′ , s ′ ) , if M ′ , s ′ ⊨ L ψ , then there is a L -mo del ( M , s ) s.t. M , s ⊨ ϕ and ( M , s ) ↔ col p ( M ′ , s ′ ) . W e say d f or g et L ( ϕ, p ) exists if there is an L -satisable formula ψ so that d f org et L ( ϕ, p ) ≡ L ψ ; otherwise, we say d f or g et L ( ϕ, p ) do es not exist. W e say L is closed under forgetting if for every L -satisable formula ϕ and every p ∈ P , d f or g et L ( ϕ, p ) exists. Prop osition 3.5. F or ev ery modal system L , if it is closed under forgetting, then it has the uniform in terp olation prop ert y . More precisely , for every P ⊆ P , every p ∈ P , every L -satisable formula ϕ o ver P , and ev ery L -satisable ψ o v er P \ { p } , if d f or g et L ( ϕ, p ) ≡ L ψ , then ψ is a uniform in terp olant of ϕ in L ov er P \ { p } . Observ e that forgetting is closed under disjunction: F act 3.6. F or every L -satisiable formulas ϕ 1 , ϕ 2 , and p ∈ P , d f or g et L ( ϕ 1 ∨ ϕ 2 , p ) ≡ L d f or g et L ( ϕ 1 , p ) ∨ d f or g et L ( ϕ 2 , p ) . These inspire us to represent a result of forgetting (uniform interpolant) as those of some more “elemen tary” form ulas. That is, d-canonical formulas, whic h will b e dened in the following. 3 UNIF ORM INTERPOLA TION AND SYNT ACTIC METHODS 7 3.2 d-canonical form ulas and pruning In the subsection, let’s fo cus on the distributed kno wledge epistemic mo dal logic, L D . F or the set Φ , denote ϕ ∈ Φ ϕ (resp. ϕ ∈ Φ ϕ ) b y Φ (resp. Φ ). F or B ∈ P + ( A ) , let ˆ D B Φ = { ˆ D B ϕ | ϕ ∈ Φ } , and let ∇ B Φ = D B ( Φ) ∧ ( ˆ D B Φ) It is easy to chec k that for every mo del ( M , s ) , M , s ⊨ ∇ B Φ , if and only if, for all t ∈ R B ( s ) , there is ϕ ∈ Φ such that M , t ⊨ ϕ , and for all ϕ ∈ Φ , there is t ∈ R B ( s ) such that M , t ⊨ ϕ . Denition 3.7. Let P ⊆ P be nite. Dene the set D P k inductiv ely as follows: • D P 0 = { p ∈ S p ∧ p ∈ ( P \ S ) ¬ p | S ⊆ P } , i.e., the set of the minterms of P . • D P k +1 consists of formulas in the form δ 0 ∧ B∈ P + ( A ) ∇ B Φ B , where δ 0 ∈ D P 0 and Φ B ⊆ D P k . Let’s call the formulas in the form ab o ve distribute d know le dge c anonic al formulas , or d-c anonic al formulas for short, of P . F or δ = δ 0 ∧ B∈ P + ( A ) ∇ B Φ B , let’s write w ( δ ) = δ 0 and R B ( δ ) = Φ B . (In particular, when k = 0 , w ( δ ) = δ .) W e write R i ( δ ) rather than R { i } ( δ ) for simplicity . R i ( δ ) and R B ( δ ) are also called i -suc c essors and B -suc c essors of δ , resp ectiv ely . Giv en a mo dal system L , let’s denote b y D P k ( L ) the members of D P k that are satisable in L . F or any d-canonical form ulas δ and η , we say η whol ly o c curs in δ , if either η is δ or there exists B ∈ P + ( A ) and η 0 ∈ R B ( δ ) such that η wholly occurs in η 0 . Then, we hav e three imp ortan t prop ositions in parallel with the multi-agen t epistemic mo dal logics [FLvD19, Mos07]. Ev ery d-canonical form ula can act as a mo del for a formula with no larger depth and ev ery formula can b e represen ted as a unique set of d-canonical form ulas. Prop osition 3.8. Let L b e any mo dal system, δ ∈ D P k ( L ) where k ∈ N , and P ⊆ P is nite. Let ϕ ∈ L D suc h that dep ( ϕ ) ≤ k and P ( ϕ ) ⊆ P . Then, either δ ⊨ L ϕ or δ ⊨ L ¬ ϕ . Prop osition 3.9. Let ( M , s ) b e a p oin ted mo del and k ∈ N . Let P ⊆ P b e nite. Then, there exists a unique δ ∈ D P k suc h that M , s ⊨ δ . Prop osition 3.10. Let L b e an y mo dal system, ϕ ∈ L D , k ≥ dep ( ϕ ) , and P = P ( ϕ ) . Then, there exists a unique set Φ ⊆ D P k ( L ) such that ϕ ≡ L Φ . This follo wing proposition characterizes the monotonicit y of distributed knowledge from the angles of model and formula. Prop osition 3.11. Let B , C ∈ P + ( X ) such that B ⊊ C . 1. F or ev ery model ( M , s ) , R C ( s ) ⊆ R B ( s ) . 2. F or ev ery satisable d-canonical formula δ , R C ( δ ) ⊆ R B ( δ ) . 3 UNIF ORM INTERPOLA TION AND SYNT ACTIC METHODS 8 p ∧ q ¬ p ∧ q p ∧ ¬ q p ∧ q ¬ p ∧ ¬ q ¬ p ∧ q p ∧ ¬ q R B 1 R B 2 R C 1 R C 2 R D 1 R D 2 p ∧ q ¬ p ∧ q p ∧ ¬ q p ∧ q ¬ p ∧ ¬ q R B 1 R B 2 R C 1 R C 2 p ∧ q ¬ p ∧ q p ∧ ¬ q R B 1 R B 2 ↓ ↓ ↓ 2 or ↑ δ δ ↓ and δ ↑ 2 δ ↓ 2 and δ ↑ Figure 1: Pruning Observ e that ev ery d-canonical formula δ can b e represented as a tree, with every d-canonical form ula η that wholly o ccurs in it as a no de “ w ( η ) ” and with “ R B ” lab eling its edges. In tuitively , “ δ ↓ ” remov es the leav es of the largest distance from the ro ot. W e also in tro duce a notation “ δ ↑ l ” for the remaining tree whose depth is at least l . These are illustrated in Figure 1. Denition 3.12. Let P ⊆ P b e nite. Let k ∈ N and δ ∈ D P k . Then, δ ↓ is inductively dened as follo ws: δ ↓ = δ if k = 0 ; w ( δ ) if k = 1 ; w ( δ ) ∧ B∈ P + ( A ) ∇ B ( R B ( δ )) ↓ otherwise. where for an y set Φ , Φ ↓ = { ϕ ↓ | ϕ ∈ Φ } . Let l ∈ N and δ ↓ l is inductively dened as follows: δ ↓ l = δ if l = 0 ; ( δ ↓ l − 1 ) ↓ otherwise. Denote Φ ↓ l = { ϕ ↓ l | ϕ ∈ Φ } . Let δ ↑ 0 = w ( δ ) and for every l ≥ 1 , let δ ↑ l = δ if dep ( δ ) ≤ l w ( δ ) ∧ B∈ P + ( A ) ∇ B R B ( δ ) ↑ ( l − 1) otherwise where for an y set Φ , Φ ↑ l = { δ ↑ l | δ ∈ Φ } . When l = 1 , w e write δ ↑ instead of “ δ ↑ 1 ” . Naturally , ∅ ↓ l = ∅ ↑ l = ∅ . The following t wo propositions characterize the properties of pruning. Note that “ R B ( δ ↑ l ) = R B ( δ ) ↑ l ” is not true by Denition 3.12. Prop osition 3.13. Let P ⊆ P b e nite and let δ ∈ D P k . Then, for any l < k and B ∈ P + ( A ) , R B ( δ ↓ l ) = R B ( δ ) ↓ l . Prop osition 3.14. Consider the context of a modal system L . F or ev ery δ ∈ D P k ( L ) and k , l ∈ N , if k ≥ l , then the following prop erties hold: 1. δ ⊨ δ ↓ l . 2. δ ↓ l ∈ D P k − l ( L ) . 3 UNIF ORM INTERPOLA TION AND SYNT ACTIC METHODS 9 3. δ ↑ l ∈ D P l ( L ) . 4. F or ev ery h ∈ N and γ ∈ D P k + h ( L ) , γ ↓ h = γ ↑ k = ( γ ↓ h ) ↑ k . 5. F or k 1 , k 2 ∈ N , if l ≤ min { k, k 1 , k 2 } , then ( δ ↑ k 1 ) ↑ l = ( δ ↑ k 2 ) ↑ l . 3.3 F orgetting as literal elimination Ev ery form ula’s result of forgetting (uniform interpolant) can b e represen ted as the disjunction of those of its d-canonical formulas. Prop osition 3.15. If d f org et L ( δ, p ) exists for every p and every L -satisable d-canonical form ula δ , then L is closed under forgetting. Pr o of. Let ϕ b e any L -satisable formula and let k = dep ( ϕ ) . Let Φ = { δ ∈ D P k | δ ⊨ L ϕ } . By Prop osition 3.10, ϕ ≡ L Φ . Since d f or g et L ( δ, p ) exists for ev ery δ ∈ Φ and by F act 3.6, w e ha ve that d f or g et L ( ϕ, p ) ≡ L δ ∈ Φ d f or g et L ( δ, p ) . Then, d f org et L ( ϕ, p ) exists. Therefore, L is closed under forgetting. Therefore, w e only need to consider how “ d f or g et L ( δ, p ) ” is obtained. The concept of literal elimination can also b e applied to L D C . Denition 3.16 (Literal Elimination) . Let ϕ ∈ L D C and p be an atom. W e denote b y ϕ p the form ula obtained from ϕ b y substituting all occurrences of ¬ p with ⊤ and subse quently , substituting all o ccurrences of p with ⊤ . W e call ϕ p the r emainder of eliminating p . Similar to “ Φ ↓ ”, let’s denote Φ p = { ϕ p | ϕ ∈ Φ } . It is also easy to chec k the fact that ( δ ↓ l ) p = ( δ p ) ↓ l and ( δ ↑ l ) p = ( δ p ) ↑ l . Prop osition 3.17. If δ ∈ D P k and p is an atom, then, δ ⊨ δ p Literal elimination is a robust to ol to construct the forgetting result. In tuitively , “ δ p ≡ L d f or g et L ( δ, p ) ” may b e concluded, but it is not alwa ys true (c.f. in 5.1). Here, we provide a sucien t condition for the existence of d f or g et L ( δ, p ) . Theorem 3.18. Consider the context of a mo dal system L . Let P ⊆ P be nite and p ∈ P . F or ev ery k ≥ 0 and ev ery δ ∈ D P k ( L ) , if the follo wing condition holds: There is l ≥ k such that for ev ery γ ∈ D P l ( L ) and every L -model ( M ′ , s ′ ) of γ p , if γ ↑ k = δ , then there is an L -mo del ( M , s ) suc h that • M , s ⊨ δ , • ( M , s ) ↔ col p ( M ′ , s ′ ) . then d f org et L ( δ, p ) ≡ L { γ ∈ D P l ( L ) | γ ↑ k = δ } p . Pr o of. Let Φ = { γ ∈ D P l ( L ) | γ ↑ k = δ } . Let’s chec k Φ p satises the F orth and the Bac k conditions of forgetting. F or ev ery L -mo del ( M , s ) of δ and ev ery L -mo del ( M ′ , s ′ ) suc h that ( M , s ) ↔ col p ( M ′ , s ′ ) , there is γ ∈ D P l ( L ) suc h that M , s ⊨ γ . By Proposition 3.14, γ ⊨ γ ↑ k and γ ↑ k ∈ D P k ( L ) . Then by Prop osition 4 UNIF ORM INTERPOLA TION IN K n D , KD n D , AND T n D 10 3.9, δ = γ ↑ k . So, γ ∈ Φ . Since ( M , s ) ↔ col p ( M ′ , s ′ ) , w e ha ve M ′ , s ′ ⊨ γ p . So, M ′ , s ′ ⊨ Φ p . Then, the F orth condition of forgetting is satised. Con versely , for ev ery L -mo del ( M ′ , s ′ ) of Φ p , there is γ ∈ Φ such that M ′ , s ′ ⊨ γ p . By the premise, there is an L -mo del ( M , s ) suc h that • M , s ⊨ δ , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Then, the Bac k condition of forgetting is satised. Therefore, d f org et L ( δ, p ) ≡ L { γ ∈ D P l ( L ) | γ ↑ k = δ } p . Observ e that, if the sucient condition holds for l = k , then by Proposition 3.9, δ is the only mem b er of Φ and then, δ p ≡ L d f or g et L ( δ, p ) . Theorem 3.18 pro vides us with a guideline for proving the uniform in terp olation prop ert y . In the follo wing sections, we will settle the parameter l and then construct the mo del ( M , s ) to meet the sucient condition in Theorem 3.18 for each system L . Thus, it will b e prov ed that each L among K n D , D n D , T n D , K45 n D , KD45 n D , and S5 n D is closed under forgetting and then has the uniform in terp olation property . 4 Uniform In terp olation in K n D, KD n D, and T n D The mo dal systems K n D , KD n D , T n D hav e the uniform interpolation prop ert y . W e will pro ve this b y showing the sucien t condition of Theorem 3.18 is satised when “ l = k ” . More precisely , we will show that δ p ≡ L d f or g et L ( δ, p ) , for every L among the three systems. F or conv enience, let’s uniformly denote b y P the discussed nite subset of P and p is an atom in P to b e forgotten. Let’s rst consider K n D and D n D . Lemma 4.1 (Lemma for K n D and D n D ) . Let L b e K n D or D n D , and δ ∈ D P k ( L ) for k ≥ 0 . F or an y model ( M ′ , s ′ ) , if M ′ , s ′ ⊨ δ p , then there is an L -mo del ( M , s ) such that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. Let’s pro ve b y induction on k . Base case ( k = 0 ): δ is a min term, namely , δ = w ( δ ) . Let M = ( S, R, V ) b e a cop y of M ′ , and construct a new actual world s such that for every q ∈ P , q ∈ V ( s ) if and only if w ( δ ) ⊨ q . F or every i ∈ A and t ′ ∈ R ′ i ( s ′ ) in M ′ , if t is the cop y of t ′ in M , add ( s, t ) to R i in M . Let ρ = { ( u, u ′ ) | u is the cop y of u ′ } ∪ { ( s, s ′ ) } . Then, it is easy to see that ( M , s ) ↔ col p ( M ′ , s ′ ) and M , s ⊨ δ . (F or con venience, let’s say s ′ (resp. δ ) constructs s .) Inductiv e step : Let s b e the constructed new actual w orld b y s ′ as is in the base case. Initially , let S = { s } , R i = ∅ for every i ∈ A , and ρ = { ( s, s ′ ) } . F or ev ery B ∈ P + ( A ) , every t ′ ∈ R ′ B ( s ′ ) , and every η ∈ R B ( δ ) , supp ose that M ′ , t ′ ⊨ η p and η p ∈ R B ( δ p ) . By the inductive hypothesis, there is a mo del ( M t , t ) and a bisimulation ρ t suc h that M t , t ⊨ η and ρ t : ( M t , t ) ↔ col p ( M ′ , t ′ ) . Denote M t = ( S t , R t , V t ) . Then, concatenate s with ( M t , t ) in the follo wing w ay: • Extend S with S ∪ S t , R i with R i ∪ R t i for i ∈ A , V with V ∪ V t , and ρ with ρ ∪ ρ t . • Add ( s, t ) to R j for every j ∈ B . 4 UNIF ORM INTERPOLA TION IN K n D , KD n D , AND T n D 11 Denote by T ∗ B the set of all such t with regard to B . Then, let ( M , s ) = ( S , R , V , s ) . Observ e that for every B ∈ P + ( A ) , R B ( s ) = B⊆B 0 T ∗ B 0 . W e need to c heck that ( M , s ) ↔ col p ( M ′ , s ′ ) and M , s ⊨ δ . W e hav e kno wn that ( s, s ′ ) ∈ ρ . F or every pair ( u, u ′ ) ∈ ρ , u is either a cop y of u ′ or constructed b y u ′ inductiv ely . It is easy to see that V ( u ) ∼ p V ( u ′ ) . If u is in some submodel ( M t , t ) , b y the construction, ρ t : ( M t , t ) ↔ col p ( M ′ , t ′ ) and then the F orth and Back conditions ab out u are satisied by the inductive h yp othesis. W e only need to consider the case where u is s : • F or every B ∈ P + ( A ) , every v ∈ R B ( s ) , by the construction, there is B 0 ⊇ B such that v ∈ T ∗ B 0 and v is constructed by v ′ ∈ R B 0 ( s ′ ) and ( v , v ′ ) ∈ ρ . Since R B 0 ( s ′ ) ⊆ R B ( s ′ ) , then v ′ ∈ R B ( s ′ ) . • F or every B ∈ P + ( A ) , ev ery v ′ ∈ R ′ B ( s ′ ) , since M ′ , s ′ ⊨ δ p , there is η ∈ R B ( δ ) such that M ′ , v ′ ⊨ η p . By the construction, there is v ∈ T ∗ B ⊆ R B ( s ) constructed b y η and v ′ ∈ R B ( s ′ ) and ( v , v ′ ) ∈ ρ . Therefore, ρ : ( M , s ) ↔ col p ( M ′ , s ′ ) Let’s chec k M , s ⊨ δ . W e ha ve already kno wn M , s ⊨ w ( δ ) in the construction. • F or ev ery B ∈ P + ( A ) and ev ery η ∈ R B ( δ ) , as η p ∈ R B ( δ p ) and M ′ , s ′ ⊨ ∇ B R B ( δ p ) , there is t ′ ∈ R ′ B ( s ′ ) , suc h that M ′ , t ′ ⊨ η p . By the construction, there is t ∈ T ∗ B ⊆ R B ( s ) constructed b y t ′ and η so that M t , t ⊨ η . Note that the construction only adds the edge R B from s to t and leav es others in tact. So, M , t ⊨ η . • F or every B ∈ P + ( A ) and every t ∈ R B ( s ) , there is B 0 ⊇ B suc h that t ∈ T ∗ B 0 and t is constructed b y t ′ and η ∈ R B 0 ( δ ) ⊆ R B ( δ ) . By the inductive hypothesis of the construction, M t , t ⊨ η . The construction only adds the edge R B 0 from s to t and keeps others in tact. So, M , t ⊨ η . So, M , s ⊨ B∈ P + ( A ) ∇ B R B ( δ ) . Therefore, M , s ⊨ δ . In this construction, for every i ∈ A , ev ery t, t ′ with ( t, t ′ ) ∈ ρ , when R ′ i ( t ′ ) is nonempty , so is R i ( t ) . So, when L is D n D , ( M , s ) is also a D n D -mo del (a serial mo del). Hence, the lemma is prov ed for K n D and D n D . The case of T n D is similar and augmented with the following prop erty about reexivit y: Lemma 4.2. Let δ ∈ D P k ( T n D ) for k ≥ 1 . Let l ∈ { 1 , . . . , k } . Then, for all B ∈ P + ( A ) , w e ha ve δ ↓ l ∈ R B ( δ ↓ ( l − 1) ) and δ ↑ ( l − 1) ∈ R B ( δ ↑ l ) . Lemma 4.3 (Lemma for T n D ) . Let δ ∈ D P k ( T n D ) for some k ≥ 0 . F or an y T n D -mo del ( M ′ , s ′ ) , if M ′ , s ′ ⊨ δ p , then there is a T n D -mo del ( M , s ) suc h that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. Note that D P k ( T n D ) ⊆ D P k ( K n D ) . By Lemma 4.1, there exists a K n D -mo del there exists ( M ∗ , s ∗ ) = ( S ∗ , R ∗ , V ∗ , s ∗ ) suc h that M ∗ , s ∗ ⊨ δ and ( M ∗ , s ∗ ) ↔ col p ( M ′ , s ′ ) . W e further extend ( M ∗ , s ∗ ) by adding all the reexiv e edges to every w orld as follows: • Let S = S ∗ , V = V ∗ , and s = s ∗ . • F or ev ery i ∈ A , let R i = R ∗ i ∪ { ( t, t ) | t ∈ S } and R = ( R i ) i ∈A . 4 UNIF ORM INTERPOLA TION IN K n D , KD n D , AND T n D 12 s ′ t ′ 1 ( M ′ , t ′ 1 ) t ′ 2 ( M ′ , t ′ 2 ) R ′ B R ′ C δ η 1 η 2 R B R C s t 1 ( M t 1 , t 1 ) t 2 ( M t 2 , t 2 ) R B R C M ′ , s ′ ⊨ δ p M ′ , t ′ 1 ⊨ η p 1 M ′ , t ′ 2 ⊨ η p 1 Figure 2: Inductive step in Lemma 4.1 Th us, let ( M , s ) = ( S, R , V , s ) , which is ob viously a T n D -mo del. Let ρ b e the collective p -bisimulation that witnesses ( M ∗ , s ∗ ) ↔ col p ( M ′ , s ′ ) . The conditions of Denition 3.2 obviously remain, except for the F orth condition. F or any u ∈ S ∗ and u ′ ∈ S ′ , supp ose uρu ′ . F or any B ⊆ A , for an y v ∈ R B ( u ) , if u = v , the case is no dieren t from the case of v ∈ R ∗ B ( u ) in ( M ∗ , s ∗ ) ; if u = v , because M ′ is reexive, then u ′ ∈ R ′ B ( u ′ ) and therefore w e still ha ve uρu ′ . Therefore, the F orth condition also remains. Therefore, ρ : ( M , s ) ↔ col p ( M ′ , s ′ ) . Let’s show that M , s ⊨ δ . F or every t ∈ S which is not a copy , let’s denote by η t the d-canonical form ula that constructs t . (If t is s , then η t is δ .) W e will show that M , t ⊨ η ↑ l t for ev ery l ∈ N . Let’s prov e by induction on l . • When l = 0 , η ↑ 0 t = w ( η t ) and b y the construction, M , t ⊨ w ( η t ) . • Supp ose l > 0 . – dep ( η t ) ≤ l : η ↑ l t = η ↑ ( l − 1) t = η t . By the inductive h yp othesis, M , t ⊨ η ↑ l t . – dep ( η t ) ≥ l > 0 : W e hav e kno wn that M , t ⊨ w ( η t ) . F or every u ∈ R B ( t ) , if u = t , by the hypothesis, M , u ⊨ η ↑ ( l − 1) u ; if u = t , b y Lemma 4.2, η ↑ ( l − 1) t ∈ R B ( η ↑ l t ) and by the h yp othesis, M , t ⊨ η ↑ ( l − 1) t . Conv ersely , for ev ery η ∈ R B ( η t ) , there is a w orld u ∈ R B ( t ) constructed by η and M , u ⊨ η ↑ ( l − 1) b y the inductive h yp othesis. Therefore, M , t ⊨ η ↑ l t . Note that δ ↑ k = δ . So, we ha ve M , s ⊨ δ . Hence, the lemma for T n D is pro ved. Theorem 4.4. K n D , KD n D , and T n D hav e the uniform in terp olation prop erty . Pr o of. Let L b e any of K n D , KD n D , and T n D . By Theorem 3.18, Lemma 4.1, and Lemma 4.3, for ev ery nite P , every p , and every δ ∈ D P k ( L ) for k ≥ 0 , δ p ≡ L d f or g et L ( δ, p ) . By Proposition 3.15, 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 13 for every L -satisifaible formula ϕ has its uniform in terp olan t o ver P \ { p } . More precisely , d f or g et L ( ϕ, p ) ≡ L { δ p | δ ⊨ L ϕ and δ ∈ D P dep ( ϕ ) ( L ) } Therefore, K n D , KD n D , and T n D hav e the uniform in terp olation prop erty . 5 Uniform In terp olation in K45 n D, KD45 n D, and S5 n D In the section, let’s show K45 n D , KD45 n D , and S5 n D hav e the uniform interpolation property . All the three systems require their mo dels to b e transitive and Euclidean. W e will rst show a coun terexamples suc h that “ δ p ≡ L d f or g et L ( δ, p ) ” . Then, we will pro vide a general metho d to obtain d f or g et L ( δ, p ) , and then conclude uniform interpolation. Finally , w e sho w that in some sp ecial cases where δ p ≡ L d f or g et L ( δ, p ) holds. F or con venience, let’s uniformly denote by P the discussed nite subset of P and p is an atom in P to be forgotten. 5.1 δ p ma y not b e the uniform interpolant In this subsection, let’s assume A con tains at least three agents, i.e., { 1 , 2 , 3 } . F or simplicity , we also assume P = { p, q } . The examples in this subsection can b e extended to the case where P is larger. Prop osition 5.1. F or any k ≥ 2 , there is δ k cou ∈ D P k ( S5 n D ) and a S5 n D -mo del ( M ′ , s ′ ) of ( δ k cou ) p suc h that for any K45 n D -mo del ( M , s ) , the follo wing tw o do not hold simultaneously: • ( M , s ) ⊨ δ k cou , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Th us, ( δ k cou ) p ≡ L d f or g et L ( δ k cou , p ) , for L among K45 n D , KD45 n D , and S5 n D . Pr o of. Let’s only show how δ 2 cou and ( M ′ , s ′ ) are constructed. The full pro of is placed in the app endix. W e write “ { x, y } ∈ R B ” instead of “ ( x, y ) , ( y , x ) ∈ R B ” . Consider the mo del ( M 2 , s 2 ) = ( S, R, V , s 2 ) as follo ws: • S = { s 2 , t 1 , t 2 , t 3 , t 4 , v , w } . • F or ev ery x, y ∈ { s 2 , t 1 , t 2 , t 3 , t 4 } , { x, y } ∈ R 1 ; { t 1 , t 3 } , { t 2 , t 4 } ∈ R 2 ; { t 1 , w } , { t 4 , v } ∈ R 3 . F or ev ery x ∈ S , ( x, x ) ∈ R A . These are all the accessibility relations. • V is giv en b y the follo wing: – M 2 , x ⊨ ¬ p ∧ ¬ q , for x ∈ { t 1 , s 2 , v } , – M 2 , t 2 ⊨ p ∧ ¬ q , – M 2 , x ⊨ ¬ p ∧ q , for x ∈ { t 3 , w } , – M 2 , t 4 ⊨ p ∧ q . Th us, ( M 2 , s 2 ) is an S5 n D -mo del, which is illustrated in Figure 3. Let δ 2 cou b e the unique mem b er of D P 2 ( S5 n D ) such that M 2 , s 2 ⊨ δ 2 cou . Let’s ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e a mo del of ( δ 2 cou ) p , illustrated in Figure 3. S ′ is a copy of S and s ′ is a cop y of s 2 . Ev ery world x ′ ∈ S ′ inherits the v alue of x on q . Ev ery accessibility relation is also inherited except that { t ′ 1 , t ′ 4 } ∈ R ′ 2 but { t ′ 1 , t ′ 3 } / ∈ R ′ 2 ; { t ′ 2 , t ′ 3 } ∈ R ′ 2 but { t ′ 2 , t ′ 4 } / ∈ R ′ 2 . 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 14 s 2 t 1 t 2 t 3 t 4 w v R 1 R 1 R 2 R 2 R 3 R 3 ¬ p ∧ ¬ q ¬ p ∧ ¬ q p ∧ ¬ q ¬ p ∧ q p ∧ q ¬ p ∧ q ¬ p ∧ ¬ q ( M 2 , s 2 ) s ′ t ′ 1 t ′ 2 t ′ 3 t ′ 4 w ′ v ′ R ′ 1 R ′ 1 R ′ 2 R ′ 2 R ′ 3 R ′ 3 ¬ q ¬ q ¬ q q q q ¬ q ( M ′ , s ′ ) Figure 3: M 2 and M ′ in Prop osition 5.1. (Reexiv e edges R A are omitted for readabilit y) Prop osition 5.2. Let δ 2 cou and ( M ′ , s ′ ) b e dened as in Prop osition 5.1. F or all S5 n D -satiable d-canonical formulas γ and ξ such that dep ( γ ) , dep ( ξ ) > 2 , if • ( ξ ↑ 2 ) p = ( δ 2 cou ) p and M ′ , s ′ ⊨ ξ p , • γ ↑ 2 = δ 2 cou , then γ = ξ . Remark : Consider the mo del ( M ′ , s ′ ) dened as in Prop osition 5.1. Ev en if d f or g et L ( δ 2 cou , p ) exists, Prop osition 5.1 shows that ( M ′ , s ′ ) is not an L -mo del of d f org et L ( δ 2 cou , p ) . Prop osition 5.2 further explains that for an y L -satisable γ of larger mo dal depth than δ 2 cou suc h that γ ⊨ L δ 2 cou , we still hav e M ′ , s ′ ⊨ γ p . They inspire us to exclude those “bad models” lik e ( M ′ , s ′ ) by enlarging the mo dal depth. When these “bad mo dels” are all excluded, we ma y nd the real uniform interpolant. It is act ually the notion of Theorem 3.18. Readers may hav e noticed that Proposition 5.1 only shows d f org et L ( δ k cou , p ) is inequiv alent to ( δ k cou ) p but do es not den y its existence. This subsection claims that ( δ k cou ) p is not a uniform in terp olan t, but will this claim b e completely prov ed only when w e pro ve d f or g et L ( δ k cou , p ) really exists. The next subsection will show that the idea of enlarging the mo dal depth works and ensures the existence of an y d f or g et L ( δ, p ) , including d f or g et L ( δ k cou , p ) . 5.2 Uniform in terp olation in K45 n D, KD45 n D In this subsection, let’s show a general construction of transitiv e and Euclidean mo dels to meet the sucien t condition of Theorem 3.18. Let’s rst consider some key denitions and prop erties for the transitive and Euclidean case. Denition 5.3. Let Φ b e a set of formulas and M = ( S, R , V ) b e a mo del. F or any T ⊆ S , we sa y T is Φ -complete, if the following conditions hold • for ev ery t ∈ T , there exists ϕ ∈ Φ such that M , t ⊨ ϕ ; • for ev ery ϕ ∈ Φ , there exists t ∈ T suc h that M , t ⊨ ϕ . 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 15 Observ e that, M , s ⊨ ∇ B Φ i R B ( s ) is Φ -complete. Naturally , R B ( s ) is R B ( δ ) -complete if M , s ⊨ δ . By transitivit y and the Euclideanness, it is easy to see that a world s and its B -successor t share the B -successors, that is, if t ∈ R B ( s ) , then R B ( t ) = R B ( s ) . Ho wev er, it is sligh tly dierent for form ulas, b ecause a d-canonical formula δ and its B -successor η ha ve dierent mo dal depths. Then, we ha ve the following property 1 : Prop osition 5.4 (Identical Successors Property) . Let δ b e a D P k ( K45 n D ) for k ≥ 2 . Let l ∈ N s.t. 1 ≤ l < k . Then, for all B ∈ P + ( A ) and η ∈ R B ( δ ) , R B ( δ ) ↓ l = R B ( η ) ↓ l − 1 . The follo wing prop osition describ es how the distributed kno wledge transitive and Euclidean relations are in tertwined, whic h we hav e to consider for the mo del construction. Prop osition 5.5 (Sibling Prop erty) . Let δ ∈ D P k ( L ) where k ≥ 2 . Let B , C ∈ P + ( A ) such that C 1 = C ∩ B = ∅ and C 2 = C ∩ B c = ∅ . F or ev ery η ∈ R B ( δ ) and χ ∈ R C ( η ) , there is η 0 ∈ R C 1 ( δ ) suc h that • η ↓ 0 = χ ∈ R C ( η ) , • R D ( η 0 ) = R D ( η ) for ev ery D ∈ P + ( C 2 ) , T ransitivity and Euclideanness, as w ell as reexivity , are global prop erties, and it is not practical to keep them during each construction step. Let’s introduce the following local prop erties: Denition 5.6. Let M be an y Kripke mo del and W b e an y set of worlds of M . F or i ∈ A , w e say a set W is quasi- i -e quivalent , if • W = R TC ( t, R i ∪ R − 1 i ) for ev ery t ∈ W ; • for ev ery t 1 , t 2 ∈ W , R i ( t 1 ) = R i ( t 2 ) . W e say W is i -e quivalent if it further satises that • for ev ery t ∈ W , ( t, t ) ∈ R i . F or every B ∈ P + ( A ) , if we replace the “ i ” ab ov e with B , we obtain the denitions of quasi- B - e quivalenc e and B -e quivalenc e resp ectiv ely . Prop osition 5.7. F or an y model M , these t wo claims are equiv alen t 1. for ev ery t in M and ev ery i ∈ A , R TC ( t, R i ∪ R − 1 i ) is quasi- i -equiv alent; 2. M is transitiv e and Euclidean. F urthermore, the follo wing are also equiv alent 3 for ev ery t in M and ev ery i ∈ A , R TC ( t, R i ∪ R − 1 i ) is i -equiv alen t; 4 M is transitiv e, Euclidean, and reexive. In the later construction, if we ha ve constructed some transitiv e Euclidean mo dels inductively , w e will connect them in the following wa y , so that the new mo del is still transitive and Euclidean. 1 In the m ulti-agent modal logic K45 n [FLvD19], this is called “iden tical children property” while i -successors are called “ i -children” instead. How ever, the construction of a K45 n D -mo del b ecomes so complex that in Lemma 5.11, a “c hild” of t may b elong to the “older generation” than t . It ma y confuse readers if we say “c hildren” . So, w e rename them with another commonly used word, suc c essor . 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 16 Denition 5.8. Giv en a Kripk e mo del M and i ∈ A , let W 1 , W 2 , . . . , W m b e any distinct quasi- i - equiv alen t sets ( m ≥ 2 ) in M . Mer ging them with the r elation R i is the pro cess as follo ws: for an y t, u ∈ W 1 ∪ W 2 ∪ · · · ∪ W m , if ( u, u ) ∈ R i , then add ( t, u ) ∈ R i . The process of merging also implies that, as the induction proceeds, a set “ R B ( t ) ” ma y b ecome larger. Then, the notation “ R B ( t ) ” ma y b ecome misleading. Let’s introduce the follo wing concepts: Denition 5.9. Let M = ( S, R, V ) b e an y mo del and X ∈ P + ( A ) . A multi-p ointe d mo del is a mo del in the form ( M , U X ) , where U X is a family of subsets of S indexed by P + ( X ) , that is, U X = { T B ⊆ S | B ∈ P + ( X ) } F or example, giv en a mo del ( M , s ) , if X = A and U A = { R B ( s ) | B ∈ P + ( A ) } , then ( M , U A ) mak es a multi-pointed mo del. W e also rewrite Denition 3.2 to t the m ulti-p ointed mo dels as follo ws: Denition 5.10. Given X ∈ P + ( A ) , suppose ( M , U X ) and ( M ′ , U ′ X ) b e t wo multi-pointed mo dels. A collective p -bisim ulation b et ween ( M , U X ) and ( M ′ , U ′ X ) is a relation ρ b et w een S and S ′ satisfying the following: • F or an y B ∈ P + ( X ) , – for ev ery t ∈ T B , there is t ′ ∈ T ′ B suc h that ( t, t ′ ) ∈ ρ ; – for ev ery t ′ ∈ T ′ B , there is t ∈ T B suc h that ( t, t ′ ) ∈ ρ . • F or an y u ∈ S and u ′ ∈ S ′ , whenever ( u, u ′ ) ∈ ρ , w e ha ve – Atoms : V ( u ) ∼ p V ′ ( u ′ ) ; – F orth : for all B ⊆ A and all v ∈ S , if ( u, v ) ∈ R B , then there is v ′ suc h that ( u ′ , v ′ ) ∈ R ′ B and ( v , v ′ ) ∈ ρ ; – Back : for all B ⊆ A and all v ′ ∈ S , if ( u ′ , v ′ ) ∈ R ′ B , then there is v suc h that ( u, v ) ∈ R B and ( v , v ′ ) ∈ ρ ; W e also say ρ witnesses the collectiv e p -bisimulation b et w een ( M , U X ) and ( M ′ , U ′ X ) and denote this by ρ : ( M , U X ) ↔ col p ( M ′ , U ′ X ) . No w, w e can formally show a general construction for K45 n D - (resp. KD45 n D -) mo dels. Readers will see, the parameters γ and k + h + 1 act as the “ γ ” and “ l ” in Theorem 3.18. W e use tw o form ulas γ and ξ for this construction instead of γ alone, so that ξ helps ensure collective p -bisimulation while γ ensures the satisfaction relation. Note that γ and ξ are not necessarily the same. Lemma 5.11 (The Construction Lemma for K45 n D and KD45 n D ) . Let L be either K45 n D or KD45 n D . Let k , d, h be natural n umbers such that 0 ≤ k ≤ d ≤ h . Let γ , ξ ∈ D P k + h +1 ( L ) such that ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p . Let ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an L -mo del of ξ p . Giv en X ∈ P + ( A ) and the m ulti-p oin ted submo del ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed L -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } such that, 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 17 • T B is B -equiv alent in ( M , U X ) , for B ∈ P + ( X ) ; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( γ ) ↑ k -complete for B ∈ P + ( X ) . Pr o of. W e only show ho w ( M , U X ) is constructed. The full pro of is placed in the app endix together with some additional lemmas. Let’s construct b y induction on k and d . W e lab el the constructed mo del as ( M , U X ) γ ,ξ ,k,d , in order to sho w the four parameters’ change in the induction. The Greek letter η ranges o ver the d-canonical form ulas that wholly o ccur in γ , while the Greek letter ζ those that wholly occur in ξ . Initially , let S , V , ρ , and every relation R i b e empty . Base case ( k = d = 0 ) : Construct ( M , U X ) γ ,ξ , 0 , 0 as follows. Step 1 F or every B ∈ P + ( X ) , t ′ ∈ R ′ B ( s ′ ) , η ∈ R B ( γ ) , and ζ ∈ R B ( ξ ) , if ( η ↑ ( k + d ) ) p = ( ζ ↑ ( k + d ) ) p and M ′ , t ′ ⊨ ζ p , then construct a world t suc h that for every q ∈ P , q ∈ V ( t ) if and only if w ( η ) ⊨ q . Then, add ( t, t ′ ) to ρ . Let T ∗ B b e all suc h t with resp ect to this B . (Note that when a w orld t is constructed, w e can determine its unique t ′ , η , and ζ . Let’s write this η as η t and this ζ as ζ t . Let’s say t ′ (resp. η t , ζ t ) constructs t .) Step 2 F or every B 1 , B 2 ∈ P + ( X ) , every t 1 ∈ T ∗ B 1 , t 2 ∈ T ∗ B 2 , and i ∈ B c 1 ∩ B c 2 , if ( t ′ 1 , t ′ 2 ) ∈ R ′ i , then add ( t 1 , t 2 ) to R i . Step 3 F or every B 1 , B 2 ∈ P + ( X ) , every t 1 ∈ T ∗ B 1 , t 2 ∈ T ∗ B 2 , and i ∈ B 1 ∩ B 2 , add ( t 1 , t 2 ) to R i . Step 4 F or every B ∈ P + ( X ) , let T B = B⊆C T ∗ C Extend S with B∈ P + ( X ) T B and let U X = { T B | B ∈ P + ( X ) } . Denote by ( M , U X ) γ ,ξ , 0 , 0 4 the submo del constructed via the rst four steps. Step 5 F or ev ery B ∈ P + ( X ) and every t ∈ T ∗ B , if there is i ∈ B c suc h that R ′ i ( t ′ ) = ∅ , consider the m ulti-p oin ted submo del ( M ′ , U t ′ B c ) , where U t ′ B c = { R ′ D ( t ′ ) | D ∈ P + ( B c ) } . Let ( M t , U t B c ) b e a cop y of ( M ′ , U t ′ B c ) and let ρ t = { ( u, u ′ ) | u is a cop y of u ′ . } . A dd the submo del ( M t , U t B c ) to ( S, R, V ) , and extend ρ to b e ρ ∪ ρ t . (Note that so far, no edge is added betw een t and ( M t , U t B c ) . W e write “ ( M t , U t B c ) ” as “ ( M t , U t ) ” if it is clear from con text.) Step 6 F or every B ∈ P + ( X ) , every t ∈ T ∗ B , ev ery i ∈ B c , let’s denote the set R TC ( t, R i ∪ R − 1 i ) within ( M , U X ) γ ,ξ , 0 , 0 4 b y R TC ( t, R i ∪ R − 1 i ) 4 . F or every u ∈ R TC ( t, R i ∪ R − 1 i ) 4 , if ( M u , U u ) exists, which is an L -mo del, there is the quasi- i -equiv alen t set W u i in ( M u , U u ) suc h that W u i ⊇ R ′ i ( u ′ ) . Then, merge all these sets W u i and R TC ( t, R i ∪ R − 1 i ) 4 with the relation R i . Th us, ( M , U X ) γ ,ξ , 0 , 0 is constructed. Observ e that this construction do es not sp ecify the v alue of d , so ( M , U X ) γ ,ξ , 0 ,d is also constructed for any d ≥ 0 . Inductiv e step : Steps 1, 3, and 4 are the same as those of the base case. W e sho w Steps 2, 5, and 6, where Step 2 is divided into t wo substeps. 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 18 Step 2-1 F or ev ery B ∈ P + ( X ) and every t ∈ T ∗ B that is constructed in Step 1, for every C ∈ P + ( A ) suc h that C 1 = B ∩ C = ∅ and C 2 = B c ∩ C = ∅ , and every u ′ ∈ R ′ C ( t ′ ) , we claim that there exists η ∈ R C 1 ( γ ) and ζ ∈ R C 1 ( ξ ) such that – η ↓ ∈ R C ( η t ) , – R D ( η ) = R D ( η t ) for ev ery D ∈ P + ( C 2 ) , – M ′ , u ′ ⊨ ζ p – ( η ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p . Construct a new w orld u such that q ∈ P , q ∈ V ( u ) if and only if w ( η ) ⊨ q ; add u to T ∗ C 1 . A dd ( t, u ) and ( u, u ) to R i for ev ery i ∈ C 2 . Add ( u, u ′ ) to ρ . (W e also sa y u is constructed b y u ′ , η , and ζ , lik e those constructed in Step 1.) Step 2-2 F or every B ∈ P + ( X ) , every t ∈ T ∗ B , every i ∈ P + ( B c ) , and every u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . W e need to prov e the claim that the form ulas η and ζ exist in Step 2-1. On the one hand, since M ′ , t ′ ⊨ ζ p t , by Prop osition 5.5 (the Sibling Prop erty), there is ζ ∈ R C 1 ( ξ ) such that • M ′ , u ′ ⊨ ζ p , • ( ζ ↓ ) p ∈ R C ( ζ t ) p • R D ( ζ ) p = R D ( ζ t ) p for every D ∈ P + ( C 2 ) . Note that since t is constructed in Step 1, ( η ↑ ( k + d ) t ) p = ( ζ ↑ ( k + d ) t ) p . So, there is χ ∈ R C ( η t ) such that ( χ ↑ ( k + d − 1) ) p = (( ζ ↓ ) ↑ ( k + d − 1) ) p . Note that χ, ζ ↓ ∈ D P k + h − 1 and ζ ∈ D P k + h while k + h ≥ k + h − 1 ≥ k + d − 1 , so by Prop osition 3.14, w e hav e ( ζ ↓ ) ↑ ( k + d − 1) = ζ ↑ ( k + d − 1) and then ( χ ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p . On the other hand, by Prop osition 5.5 (the Sibling Prop erty) again, there is η ∈ R C 1 ( γ ) such that • χ = η ↓ ∈ R C ( η t ) , • R D ( η ) = R D ( η t ) for ev ery D ∈ P + ( C 2 ) . Similarly , since χ = η ↓ ∈ D P k + h − 1 and η ∈ D P k + h while k + h ≥ k + h − 1 ≥ k + d − 1 , by Prop osition 3.14, we ha ve χ ↑ ( k + d − 1) = η ↑ ( k + d − 1) . Therefore, ( η ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p . Hence, the form ulas η and ζ are what Step 2-1 requires. Denote by ( M , U X ) γ ,ξ ,k,d 4 the submo del constructed via the rst four steps. Step 5 F or ev ery B ∈ P + ( X ) and every t ∈ T ∗ B , if there is i ∈ B c suc h that R ′ i ( t ′ ) = ∅ „ consider the m ulti-p oin ted submo del ( M ′ , U t ′ B c ) , where U t ′ B c = { T t ′ D | T t ′ D = R ′ D ( t ′ ) for D ∈ P + ( B c ) } . Let’s discuss the world t . – t is constructed in Step 1: Then, ( η ↑ ( k + d ) t ) p = ( ζ ↑ ( k + d ) t ) p . Since k ≤ d , then k − 1 ≤ d . By the inductive hypothesis, a m ulti-p ointed mo del ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d = ( S t , R t , V t , U t B c ) is constructed, where U t B c = { T t D | D ∈ P + ( B c ) } , such that ∗ T t D is D -equiv alent in ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d , for D ∈ P + ( B c ) ; ∗ ρ t : ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d ↔ col p ( M ′ , U t ′ B c ) ; 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 19 ∗ T t D is R D ( η t ) ↑ ( k − 1) -complete, for D ∈ P + ( B c ) . – t is constructed in Step 2-1: Then, ( η ↑ ( k + d − 1) t ) p = ( ζ ↑ ( k + d − 1) t ) p . Since k ≤ d , then k − 1 ≤ d − 1 . By the inductive h yp othesis, ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) = ( S t , R t , V t , U t B c ) is constructed, where U t B c = { T t D | D ∈ P + ( B c ) } , such that ∗ T t D is D -equiv alent in ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) , for D ∈ P + ( B c ) ; ∗ ρ t : ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) ↔ col p ( M ′ , U t ′ B c ) ; ∗ T t D is R D ( η t ) ↑ ( k − 1) -complete, for D ∈ P + ( B c ) . A dd the submo del, ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d or ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) , to ( S, R , V ) , and extend ρ to b e ρ ∪ ρ t . (W e write “ ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d ” or “ ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) ” as “ ( M t , U t ) ” if it is clear from con text.) Step 6 F or ev ery B ∈ P + ( X ) , ev ery t ∈ T ∗ B , ev ery i ∈ B c , let R i ( t ) 4 b e the members of R i ( t ) within ( M , U X ) γ ,ξ ,k,d 4 . F or ev ery u ∈ R i ( t ) 4 ∪ { t } such that ( M u , U u ) exists, T u i exists, whic h is an i -equiv alen t set. Then, merge all these sets T u i and R i ( t ) 4 ∪ { t } with the relation R i . Then, together with the other steps, ( M , U X ) γ ,ξ ,k,d is constructed for the inductive step. Let ( M , U X ) = ( M , U X ) γ ,ξ ,k,d and the constr uction is nished. Then, we conclude K45 n D and KD45 n D meet the sucien t condition of Theorem 3.18. Lemma 5.12 (Lemma for K45 n D and KD45 n D ) . Let δ ∈ D P k +1 ( L ) for k ≥ 0 . F or every γ ∈ D P 2 k +1 ( L ) and ev ery L -mo del ( M ′ , s ′ ) of γ p , if γ ↑ ( k +1) = δ , then there is an L -mo del ( M , s ) suc h that • M , s ⊨ δ , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. Consider the m ulti-p ointed submo del of ( M ′ , s ′ ) ( M ′ , U ′ A ) = ( S ′ , R ′ , V ′ , U ′ A ) where U ′ A = { T ′ B = R ′ B ( s ′ ) | B ∈ P + ( A ) } . It is trivially true that ( γ ↑ ( k + k +1) ) p = ( γ ↑ ( k + k +1) ) p . Then, by Lemma 5.11, we can construct a mo del ( M , U A ) γ ,γ ,k ,k = ( S, R , V , U A ) , where U A = { T B ⊆ S | B ∈ P + ( A ) } , such that • T B is B -equiv alent in ( M , U A ) , for ev ery B ∈ P + ( X ) ; • ( M , U A ) γ ,γ ,k ,k ↔ col p ( M ′ , U ′ A ) ; • T B is R B ( γ ) ↑ k -complete, for ev ery B ∈ P + ( X ) . 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 20 Note that R B ( γ ) ↑ k = R B ( δ ) exactly , so T B is R B ( δ ) -complete. Let’s write ( M , U A ) γ ,γ ,k ,k as ( M , U A ) for simplicity . A dd a new actual world s to S suc h that for every q ∈ P , q ∈ V ( s ) if and only if w ( δ ) ⊨ q . A dd ( s, s ′ ) ∈ ρ . Add ( s, t ) ∈ R i for ev ery t ∈ T B , ev ery i ∈ B , and every B ∈ P + ( A ) . Thus, we obtain the p ointed L -mo del ( M , s ) = ( S, R, V , s ) . It is easy to see that ( M , s ) ↔ col p ( M ′ , s ′ ) . Observ e that M , s ⊨ w ( δ ) and for every B ∈ P + ( A ) , T B is exactly R B ( s ) , so R B ( s ) is R B ( δ ) - complete. Therefore, M , s ⊨ δ . Theorem 5.13. K45 n D and KD45 n D hav e the uniform in terp olation prop erty . Pr o of. Let L b e K45 n D or KD45 n D . Let P ⊆ P b e nite and p b e an atom. Observe that every mem b er δ of D P 0 ( L ) , which is a min term, has a uniform interpolant δ p . F or k ≥ 0 and δ ∈ D P k +1 ( L ) , b y Lemma 5.12 and Theorem 3.18, d f or g et L ( δ, p ) exists. More precisely , d f or g et L ( δ, p ) ≡ L { γ p | γ ∈ D P 2 k +1 and γ ↑ ( k +1) = δ } By Prop osition 3.5 and Prop osition 3.15, K45 n D and KD45 n D ha ve the uniform in terp olation prop erty . 5.3 Uniform in terp olation in S5 n D Lemma 5.14 (The Construction Lemma for S5 n D ) . Let k , d, h b e natural num b ers such that 0 ≤ k ≤ d ≤ h . Let γ , ξ ∈ D P k + h +1 ( S5 n D ) such that ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p . Let ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an S5 n D -mo del of ξ p . Giv en X ∈ P + ( A ) and the m ulti-p oin ted submo del ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed S5 n D -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } such that, • T B is B -equiv alent, for every B ∈ P + ( X ) ; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( γ ) ↑ k -complete, for ev ery B ∈ P + ( X ) . Pr o of. There are only a few n uances in the construction of S5 n D -mo dels from the case of K45 n D . That is, Step 2-2 of the inductiv e step should b e rewritten as: Step 2-2 F or every B ∈ P + ( X ) , ev ery t ∈ T ∗ B , add ( t, t ) ∈ R j for every j ∈ A , and subsequen tly , for ev ery i ∈ P + ( B c ) , and ev ery u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . W e leav e the full pro ofs in the app endix. Lemma 5.15 (Lemma for S5 n D ) . Let δ ∈ D P k +1 ( S5 n D ) for k ≥ 0 . F or every γ ∈ D P 2 k +1 ( S5 n D ) and ev ery S5 n D -mo del ( M ′ , s ′ ) of γ p , if γ ↑ ( k +1) = δ , then there is an S5 n D -mo del ( M , s ) such that 5 UNIF ORM INTERPOLA TION IN K45 n D , KD45 n D , AND S5 n D 21 • M , s ⊨ δ , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. Analogous to Lemma 5.12, w e add a new actual world s to the m ulti-p ointed S5 n D -mo del ( M , U A ) , but in particular, w e also add ( s, s ) to R i for each i ∈ A . It is easy to see that ( M , s ) ↔ col p ( M ′ , s ′ ) and ( M , s ) is an S5 n D -mo del. F or every B ∈ P + ( A ) , s ′ ∈ R B ( s ′ ) . By the construction, there is t s ∈ T B suc h that ( t s , s ′ ) ∈ ρ . Then, V ( t s ) = V ( s ) . Since ( M , s ) ↔ col p ( M ′ , s ′ ) , we ha ve that t s and s shares the same relations. So, T B ∪ { s } is still B -equiv alen t and R B ( δ ) -complete. Therefore, M , s ⊨ δ . Therefore, we also hav e the conclusion. Theorem 5.16. S5 n D has the uniform interpolation property . Pr o of. This proof is analogous to Theorem 5.13. 5.4 Special cases where δ p is a uniform in terp olan t By Theorem 5.13 and Theorem 5.16, w e can instantly ha ve the following corollary: Corollary 5.17. Let L b e any of K45 n D , KD45 n D , and S5 n D . F or ev ery δ ∈ D p 1 ( L ) , δ p ≡ L d f or g et L ( δ, p ) . Pr o of. When k = 0 , then δ ∈ D P 1 ( L ) and d f or g et L ( δ, p ) ≡ L { γ p | γ ∈ D P 1 and γ ↑ 1 = δ } = δ p . Consider the case where A only has tw o agen ts, that is, A = { 1 , 2 } . Th us, the three systems b ecome K45 2 D , KD45 2 D , and S5 2 D , and we still denote them by L 2 . W e will show that δ p ≡ L 2 d f or g et L 2 ( δ, p ) for any L 2 -satisable δ . This conclusion is based on the muc h simplied v ersion of the Sibling Property: Prop osition 5.18. Let δ ∈ D P k ( L 2 ) for k ≥ 2 and ( M ′ , s ′ ) b e an y L 2 -mo del of δ p . F or ev ery i, j ∈ A with i = j , every η ∈ R i ( δ ) , ev ery χ ∈ R A ( η ) , ev ery t ′ ∈ R ′ i ( s ′ ) , and every u ′ ∈ R ′ A ( t ′ ) , if M ′ , t ′ ⊨ η p and M ′ , u ′ ⊨ χ p , then there is η 0 ∈ R i ( δ ) suc h that • η ↓ 0 = χ ∈ R A ( η ) , • R j ( η ) = R j ( η 0 ) , • M ′ , u ′ ⊨ η p 0 . Pr o of. By Proposition 5.5 (the Sibling Prop ert y), there is η 0 ∈ R i ( δ ) suc h that • η ↓ 0 = χ ∈ R A ( η ) , • R j ( η ) = R j ( η 0 ) F or the mo del ( M ′ , s ′ ) , there is η 1 ∈ R i ( δ ) such that M ′ , u ′ ⊨ η p 1 and ( η p 1 ) ↓ = χ p and R ′ j ( η p ) = R ′ j ( η p 1 ) . F urthermore, b y Prop osition 5.4, R i ( η p ) = R i ( η p 1 ) = R i ( δ p ) ↓ and R i ( η ) = R i ( η 0 ) = R i ( δ ) ↓ . Th us, we can see w ( χ p ) = w ( η p 1 ) = w ( η p 0 ) , R i ( η p 1 ) = R i ( η p 0 ) , and R j ( η p 1 ) = R j ( η p 0 ) . Since A = { 1 , 2 } , w e ha ve that η p 1 = η p 0 . Hence, M ′ , u ′ ⊨ η p 0 . 6 UNIF ORM INTERPOLA TION IN PR OPOSITIONAL COMMON KNOWLEDGE 22 Lemma 5.19. Let δ ∈ D P k +1 ( L 2 ) for k ≥ 0 and ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an L 2 -mo del of δ p . Giv en X ∈ P + ( A ) and ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed L 2 -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } , and ρ ⊆ S × S ′ , such that, • T B is B -equiv alent in ( M , U X ) , for ev ery B ∈ P + ( X ) ; • ρ : ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( δ ) -complete, for every B ∈ P + ( X ) . Prop osition 5.20. F or ev ery k ≥ 0 and δ ∈ D P k ( L 2 ) , δ p ≡ L 2 d f or g et L 2 ( δ, p ) . Pr o of. This is pro v ed via Lemma 5.12 (Lemma 5.15) and Lemma 5.19 6 Uniform In terp olation in Prop ositional Common Kno wledge In this section, we extend our conclusions to the epistemic mo dal logic with b oth distributed kno wledge and prop ositional common knowledge, namely L D PC . Our current metho ds are also a v ailable for the systems K n DPC , D n DPC , T n DPC , and S5 n DPC , how ev er, not for KD45 n DPC or K45 n DPC . W e will briey explain the reasons for the last t wo systems. F or conv enience, let’s uniformly denote b y P the discussed nite subset of P and p is an atom in P to b e forgotten. Let’s use ∇ Φ to denote the form ula C ( Φ) ∧ ( ˆ C Φ) F or an y model ( M , s ) , M , s ⊨ ∇ Φ , if and only if, for all t ∈ TC ( s ) , there is ϕ ∈ Φ suc h that M , t ⊨ ϕ , and for all ϕ ∈ Φ , there is t ∈ TC ( s ) such that M , t ⊨ ϕ . Denition 6.1 (dp c-canonical formulas) . Dene C P k to b e the set inductively as follows: • C P 0 = { δ 0 ∧ ∇ Φ | δ 0 ∈ D P 0 and Φ ⊆ D P 0 } . • C P k +1 consist of formulas in the form δ 0 ∧ ∇ Φ ∧ B∈ P + ( A ) ∇ B Φ B where δ 0 ∈ D P 0 , Φ B ⊆ C P k , and Φ ⊆ D P 0 . Let’s call them c anonic al formulas of distribute d know le dge and pr op ositional c ommon know le dge , or dp c-c anonic al formulas for short. Similar to our early conv en tions, if δ is a dp c-canonical form ula in the form ab o v e, let’s write w ( δ ) = δ 0 , R B ( δ ) = Φ B , and TC ( δ ) = Φ . F or any dp c-canonical form ulas δ and η , w e sa y η whol ly o c curs in δ , if either η is δ or there exists B ∈ P + ( A ) and η 0 ∈ R B ( δ ) suc h that η wholly occurs η 0 . Let’s denote by C P k ( L ) the mem b ers of C P k that are 6 UNIF ORM INTERPOLA TION IN PR OPOSITIONAL COMMON KNOWLEDGE 23 satisable in the mo dal system L . Since we only consider the prop ositional common knowledge, an y formula of the form C ψ has a prop ositional ψ . T o simplify the pro ofs, we sligh tly mo dify the denition of modal depth. F or every propositional common knowledge form ula C ψ , let • dep ( C ψ ) = dep ( ψ ) = 0 . It is also natural to extend the concepts of pruning and literal elimination to the dp c-canonical form ulas. The only notew orthy p oin t is that “ ∇ TC ( δ ) ” is alwa ys accompanied b y w ( δ ) , whic h will nev er b e pruned. That is. δ ↓ = δ if k = 0 ; w ( δ ) ∧ ∇ TC ( δ ) if k = 1 ; w ( δ ) ∧ ∇ TC ( δ ) ∧ B∈ P + ( A ) ∇ B ( R B ( δ )) ↓ otherwise. Let δ ↑ 0 = w ( δ ) ∧ ∇ TC ( δ ) and for every l ≥ 1 , let δ ↑ l = δ if dep ( δ ) < l w ( δ ) ∧ ∇ TC ( δ ) ∧ B∈ P + ( A ) ∇ B R B ( δ ) ↑ ( l − 1) otherwise And then, w e can extend the ve imp ortant propositions to dp c-canonical form ulas, to o. Prop osition 6.2. Consider the context of a mo dal system L . Let δ ∈ C P k ( L ) where k ∈ N . F or ev ery ϕ of L D PC suc h that dep ( ϕ ) ≤ k and P ( ϕ ) ⊆ P , either δ ⊨ ϕ or δ ⊨ ¬ ϕ . Prop osition 6.3. Let ( M , s ) b e a p ointed mo del and k ∈ N . Then, there exists a unique δ ∈ C P k suc h that M , s ⊨ δ . Prop osition 6.4. Consider the context of a mo dal system L . Let ϕ ∈ L D PC , k ≥ dep ( ϕ ) , and P = P ( ϕ ) . Then, there exists a unique set Φ ⊆ C P k ( L ) such that ϕ ≡ Φ . Prop osition 6.5. Let P ⊆ P b e nite and let δ ∈ C P k . Then, for any l < k and B ∈ P + ( A ) , R B ( δ ↓ l ) = R B ( δ ) ↓ l . Prop osition 6.6. Consider the context of a mo dal system L . F or ev ery δ ∈ C P k ( L ) and k , l ∈ N , if k ≥ l , then the following prop erties hold: 1. δ ⊨ δ ↓ l . 2. δ ↓ l ∈ C P k − l ( L ) . 3. δ ↑ l ∈ C P l ( L ) . 4. F or ev ery h ∈ N and γ ∈ C P k + h ( L ) , γ ↓ h = γ ↑ k = ( γ ↓ h ) ↑ k . 5. F or k 1 , k 2 ∈ N , if l ≤ min { k, k 1 , k 2 } , then ( δ ↑ k 1 ) ↑ l = ( δ ↑ k 2 ) ↑ l . F urthermore, we can deconstruct propositional common knowledge successors as follows. 6 UNIF ORM INTERPOLA TION IN PR OPOSITIONAL COMMON KNOWLEDGE 24 Prop osition 6.7. F or ev ery satisable δ ∈ C P k where k ≥ 1 and every l ≥ 1 , TC ( δ ↑ l ) = B∈ P + ( A ) η ∈ R B ( δ ) { w ( η ↑ ( l − 1) ) } ∪ TC ( η ↑ ( l − 1) ) Theorem 6.8. F or ev ery k ≥ 0 and ev ery δ ∈ C P k ( L ) , if the follo wing holds: There is l ≥ k suc h that for every γ ∈ C P l ( L ) and every L -mo del ( M ′ , s ′ ) of γ p , if γ ↑ k = δ , then there is ( M , s ) suc h that • M , s ⊨ δ , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Then, d f org et L ( δ, p ) ≡ L { γ ∈ C P l ( L ) | γ ↑ k = δ } p . 6.1 Uniform in terp olation in K n DPC, D n DPC, T n DPC Lemma 6.9 (Lemma for K n DPC , D n DPC ) . Let L b e K n DPC or D n DPC , and δ ∈ C P k ( L ) . F or an y model ( M ′ , s ′ ) , if M ′ , s ′ ⊨ δ p , then there is an L -mo del ( M , s ) such that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. Let’s pro ve b y induction on k . Initially , let S , V , ρ , and R i for i ∈ A b e empty . Base case ( k = 0 ): • Construct s in S , such that for every q ∈ P , q ∈ V ( s ) if and only if w ( δ ) ⊨ q . Let ( s, s ′ ) ∈ ρ • F or every t ′ ∈ TC ( s ′ ) and ev ery minterm χ ∈ TC ( δ ) , if M ′ , t ′ ⊨ χ p , construct a new w orld t in S such that for ev ery q ∈ P , q ∈ V ( t ) if and only if χ ⊨ q . Let ( t, t ′ ) ∈ ρ • F or ev ery u, v ∈ S and every i ∈ A , if ( u ′ , v ′ ) ∈ R ′ i , then add ( u, v ) to R i . It is easy to see that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) when k = 0 . F urthermore, if ( M ′ , s ′ ) is serial, then ( M , s ) is also serial. Inductiv e steps : The construction is analogous to that of Lemma 4.1: F or ev ery B ∈ P + ( A ) , ev ery η ∈ R B ( δ ) and ev ery t ′ ∈ R B ( s ′ ) , if M ′ , t ′ ⊨ η p , there has b een t ∈ R B ( s ) and a submo del ( M t , t ) suc h that M t , t ⊨ η and ρ t : ( M t , t ) ↔ col p ( M ′ , t ′ ) . Let ρ b e the union of { ( s, s ′ ) } and ev ery inductiv ely constructed ρ t . It is easy to chec k ρ : ( M , s ) ↔ col p ( M ′ , s ′ ) . Since there is no edge added from every t to other parts of M , s , we hav e M , t ⊨ η . Thus, we ha ve M , s ⊨ w ( δ ) ∧ B∈ P + ( A ) ∇ B R B ( δ ) as in Lemma 4.1. W e still need to prov e M , s ⊨ ∇ TC ( δ ) : • F or every u ∈ TC ( s ) , there is t ∈ R B ( s ) suc h that u is in the submo del ( M t , t ) . If u is t , then M , u ⊨ w ( η t ) . By Prop osition 6.7, w ( η t ) ∈ TC ( δ ) . If u ∈ TC ( t ) , since M , t ⊨ η t , there is a min term χ ∈ TC ( η t ) such that M , u ⊨ χ . By Prop osition 6.7, χ ∈ TC ( η t ) ⊆ TC ( δ ) . • F or every minterm χ ∈ TC ( δ ) , b y Prop osition 6.7, there is η ∈ R B ( δ ) and either χ is w ( η ) or in TC ( η ) . There is submo del ( M t , t ) suc h that M t , t ⊨ η . There is u in ( M t , t ) suc h that M , u ⊨ χ . It is easy to see u ∈ TC ( s ) . Therefore, M , s ⊨ ∇ TC ( δ ) and th us, M , s ⊨ δ . In this construction, for every i ∈ A , ev ery t, t ′ with ( t, t ′ ) ∈ ρ , when R ′ i ( t ′ ) is nonempty , so is R i ( t ) . So, when L is D n DPC , ( M , s ) is also a D n DPC -mo del (a serial mo del). Hence, this lemma is prov ed. 6 UNIF ORM INTERPOLA TION IN PR OPOSITIONAL COMMON KNOWLEDGE 25 In parallel with Lemmas 4.2 and 4.3, the following lemmas for T n DPC also hold. W e place the pro of in the app endix. Lemma 6.10. Let δ ∈ C P k ( T n DPC ) for k ≥ 1 . Let l ∈ { 1 , . . . , k } . Then, for all B ∈ P + ( A ) , w e ha ve • δ ↓ l ∈ R B ( δ ↓ ( l − 1) ) , • δ ↑ ( l − 1) ∈ R B ( δ ↓ l ) , • w ( δ ) ∈ TC ( δ ) . Lemma 6.11 (Lemma for T n DPC ) . Let δ ∈ C P k ( T n DPC ) . F or any T n DPC -mo del ( M ′ , s ′ ) , if M ′ , s ′ ⊨ δ p , then there is a T n DPC -mo del ( M , s ) suc h that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Finally , we can conclude for the rst three systems: Theorem 6.12. K n DPC , D n DPC , T n DPC hav e the uniform in terp olation prop erty . Pr o of. Let L b e an y of the three systems. By Theorem 6.8, Lemma 6.9, and Lemma 6.11, for ev ery p and ev ery δ ∈ C P k ( L ) for k ≥ 0 , δ p ≡ L d f or g et L ( δ, p ) . By Prop osition 3.15, for ev ery L -satisifaible form ula ϕ has its uniform interpolant o ver P \ { p } . More precisely , d f or g et L ( ϕ, p ) ≡ L { δ p | δ ⊨ L ϕ and δ ∈ C P dep ( ϕ ) ( L ) } Therefore, K n DPC , D n DPC , T n DPC hav e the uniform in terp olation prop erty . 6.2 Uniform in terp olation in S5 n DPC In this subsection, let’s fo cus on S5 n DPC . This system’s Euclideanness and reexivit y ensure that, ev ery dp c-canonical form ula shares common knowledge with the dp c-canonical form ulas that wholly o ccur in it. Prop osition 6.13. F or an y S5 n DPC -satisable dpc-canonical form ulas δ and η , if η wholly o ccurs in δ , then TC ( η ) = TC ( δ ) . Pr o of. Let’s pro ve b y induction. • Base case : η = δ . It is trivial that TC ( η ) = TC ( δ ) . • Inductive steps : There is i ∈ A and η 0 ∈ R i ( δ ) such that η wholly o ccurs in η 0 . Let M , s b e an y L -mo del of δ . Since η 0 ∈ R i ( δ ) , there are t ∈ R i ( s ) suc h that M , t ⊨ η 0 . Since R i is reexive, ( s, s ) ∈ R i ; since R i is Euclidean, ( t, s ) ∈ R i . Therefore, TC ( s ) = TC ( t ) . Since M , s ⊨ ∇ TC ( δ ) and M , t ⊨ ∇ TC ( η 0 ) , we hav e TC ( η 0 ) = TC ( δ ) . By the inductiv e h yp othesis, TC ( η 0 ) = TC ( η ) . Therefore, TC ( η ) = TC ( δ ) . Hence, this proposition is prov ed. Prop ositions 5.4 (the Iden tical Successors Property) and 5.5 (the Sibling Property) can b e extended to L D PC . Their pro ofs are not inuenced by the addition of common kno wledge, so we do not rep eat them here. 6 UNIF ORM INTERPOLA TION IN PR OPOSITIONAL COMMON KNOWLEDGE 26 Prop osition 6.14. Let δ b e a C P k ( S5 n DPC ) for k ≥ 2 . Let l ∈ N s.t. 1 ≤ l < k . Then, for all B ∈ P + ( A ) and η ∈ R B ( δ ) R B ( δ ) ↓ l = R B ( η ) ↓ l − 1 Prop osition 6.15. Let δ ∈ C P k ( S5 n DPC ) where k ≥ 2 . Let B , C ∈ P + ( A ) suc h that C 1 = C ∩ B = ∅ and C 2 = C ∩ B c = ∅ . F or every η ∈ R B ( δ ) and ζ ∈ R C ( η ) , there is η 0 ∈ R C 1 ( δ ) suc h that • η ↓ 0 = ζ ∈ R C ( η ) , • R D ( η 0 ) = R D ( η ) for ev ery D ∈ P + ( C 2 ) , Then, we ha ve a construction lemma in parallel with Lemma 5.11 for S5 n DPC . Lemma 6.16 (The Construction Lemma for S5 n DPC ) . Let k , d, h b e natural n umbers suc h that 0 ≤ k ≤ d ≤ h . Let γ , ξ ∈ C P k + h +1 ( S5 n DPC ) such that ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p . Let ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an S5 n DPC -mo del of ξ p . Giv en X ∈ P + ( A ) and the m ulti-p oin ted submo del ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed S5 n DPC -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } such that, • T B is B -equiv alent in ( M , U X ) , for ev ery B ∈ P + ( X ) ; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( γ ) ↑ k -complete, for ev ery B ∈ P + ( X ) . Pr o of. Let only sho w the nuanced steps of construction. The full pro of is placed in the app endix. This construction inherits the steps of Lemma 5.11, and we only need to mo dify the follo wing steps: Base case : Step 5 F or ev ery B ∈ P + ( X ) such that B = A and ev ery t ∈ T ∗ B , consider the m ulti-p ointed submo del ( M ′ , U t ′ B c ) , where U t ′ B c = { R ′ D ( t ′ ) | D ∈ P + ( B c ) } . Construct ( M t , U t B c ) as follows: Initially , let S t , V t , ρ t , and ev ery edge b e empty . – F or ev ery u ′ ∈ TC ( t ′ ) and ev ery minterm χ ∈ TC ( η t ) , if M ′ , u ′ ⊨ χ p , then construct u in S such that for ev ery q ∈ P , q ∈ V ( u ) if and only if χ ⊨ q . Let ( u, u ′ ) ∈ ρ t . – F or ev ery C ∈ P + ( A ) and ev ery u, v in S t , if ( u ′ , v ′ ) ∈ R ′ C , add ( u, v ) to R i for i ∈ C . – F or ev ery D ∈ P + ( B c ) , let U t ∗ D = { u | ( u, u ′ ) ∈ ρ t and u ′ ∈ R D ( t ′ ) } and U t D = D⊆D 0 U t ∗ D 0 Let U t B c = { U t D | D ∈ P + ( B c ) } . – F or all the w orlds u ′ in ( M ′ , s ′ ) that are unreachable from t ′ , add the induced submo del ( M ′ , u ′ ) to S t as copies, and this submo del inherits their relations and v aluation in M ′ and ( v , v ′ ) ∈ ρ t for every v ′ and its copy v in the copied submo del. 6 UNIF ORM INTERPOLA TION IN PR OPOSITIONAL COMMON KNOWLEDGE 27 F or con venience, let’s still call all the worlds in ( M t , U t B c ) the c opies of their coun terparts in M ′ , and call ( M t , U t B c ) a copy of ( M ′ , U t ′ B c ) . Observ e that ( M t , U t B c ) is still an S5 n DPC -mo del and ev ery set U t D is D -equiv alen t. Recall that we denote the set R TC ( t, R i ∪ R − 1 i ) within ( M , U X ) γ ,ξ , 0 , 0 4 b y R TC ( t, R i ∪ R − 1 i ) 4 . Step 6 F or ev ery B ∈ P + ( X ) , ev ery t ∈ T ∗ B , ev ery i ∈ B c , ev ery u ∈ R TC ( t, R i ∪ R − 1 i ) 4 , U u i in ( M u , U u ) is an i -equiv alen t set. Then, merge all these sets U u i and R TC ( t, R i ∪ R − 1 i ) 4 with the relation R i . Inductiv e step : Step 2-2 F or every B ∈ P + ( X ) , ev ery t ∈ T ∗ B , add ( t, t ) ∈ R j for every j ∈ A , and subsequen tly , for ev ery i ∈ P + ( B c ) , and ev ery u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . Lemma 6.17 (Lemma for S5 n DPC ) . Let δ b e an y S5 n DPC -satisable dp c-canonical form ula. • If δ ∈ C P 0 , then for ev ery L -mo del ( M ′ , s ′ ) of δ p , there is an S5 n DPC -mo del ( M , s ) suc h that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . • Supp ose δ ∈ C P k +1 where k ≥ 0 . F or ev ery γ ∈ C P 2 k +1 ( S5 n DPC ) and every S5 n DPC -mo del ( M ′ , s ′ ) of γ p , if γ ↑ ( k +1) = δ , then there is an S5 n DPC -mo del ( M , s ) suc h that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. Supp ose δ ∈ C P 0 and M ′ , s ′ ⊨ δ p . Let’s construct a new actual world s such that for ev ery q ∈ P , q ∈ V ( s ) if and only if w ( δ ) ⊨ q . Then, construct a model ( M s , U s A ) as in Step 5 of the base case of Lemma 6.16, suc h that ( M s , U s A ) ↔ col p ( M ′ , U ′ A ) . Then concatenate ( M s , U s A ) to s suc h that for any t in ( M s , U s A ) and an y B ∈ P + ( A ) , ( s, t ) ∈ R B if and only if ( s ′ , t ′ ) ∈ R ′ B . It is easy to see that ( M , s ) suc h that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . The proof for the case “ δ ∈ C P k +1 ” is analogous to that of Lemma 5.12 and Lemma 5.15, since w e ha ve pro ved Lemma 6.16. Theorem 6.18. S5 n DPC has the uniform interpolation property . Pr o of. Every member δ of C P 0 ( S5 n DPC ) , by Lemma 6.17 and Theorem 6.8, has a uniform in ter- p olant δ p . F or k ≥ 0 and δ ∈ C P k +1 ( S5 n DPC ) , by Lemma 6.17 and Theorem 6.8, d f or g et S5 n DPC ( δ, p ) exists. More precisely , d f or g et S5 n DPC ( δ, p ) ≡ S5 n DPC { γ p | γ ∈ C P 2 k +1 and γ ↑ ( k +1) = δ } Hence, S5 n DPC has the uniform interpolation prop ert y . 6.3 Limitations: K45 n DPC and KD45 n DPC The construction lemmas are not a v ailable for K45 n DPC or KD45 n DPC . Then, the conclusion of uniform interpolation cannot b e extended to the tw o systems. W e conjecture that KD45 n DPC has the uniform interpolation prop erty . Ho wev er, since ev ery mo del of KD45 n DPC is not necessarily reexiv e, Prop osition 6.13 no longer holds. Then, every tw o constructed worlds ma y not ha ve the same common kno wledge but Euclideanness and transitivity 7 CONCLUSION 28 ma y still connect them. W e conjecture that Step 2 of the base case can be revised and then a construction lemma for KD45 n DPC is p ossible. That p ossible pro of has b een dierent from the curren t ones, so it is b eyond the scop e of this pap er. The case of K45 n DPC is even tougher. Observ e Step 5 of the base case: Step 5 F or ev ery B ∈ P + ( X ) such that B = A and ev ery t ∈ T ∗ B , consider the m ulti-p ointed submo del ( M ′ , U t ′ B c ) , ... Recall that ev ery mo del is serial in the cases of KD45 n DPC or S5 n DPC , so R ′ j ( t ′ ) is nonempt y for j ∈ B c and then ( M ′ , U t ′ B c ) exists in ( M ′ , s ′ ) . Ho wev er, this is no longer ensured in K45 n DPC . It is likely that for every j ∈ B c , R ′ j ( t ′ ) = ∅ , and then ( M ′ , U t ′ B c ) do es not exist at all. Then, the construction will not pro ceed. Let’s see a simple example. Let P = { p.q } and A contains at least t wo agen ts: 1 and 2. • Let η = p ∧ q ∧ ∇{ p ∧ q , ¬ p ∧ q } . • Let γ = p ∧ ¬ q ∧ ∇{ p ∧ q , ¬ p ∧ q } ∧ ∇ { 1 } { η } ∧ B∈ P + ( A ) and B = { 1 } ∇ B ∅ . Note that b oth γ and η are K45 n DPC -satisable, and TC ( γ ) = TC ( η ) = { p ∧ q , ¬ p ∧ q } . Consider the mo del ( M ′ , s ′ ) as follo ws: • S ′ = { s ′ , t ′ } • R ′ 1 = { ( s ′ , t ′ ) , ( t ′ , t ′ ) } and the other relations are empt y . • V ′ is given so that M ′ , s ′ ⊨ ¬ q while M ′ , t ′ ⊨ q . It is easy to c heck that M ′ , s ′ ⊨ γ p . When we wan t to construct ( M , U A ) γ ,γ , 0 , 0 as w e did in Lemma 6.17, we will nd that S = T 1 and there is no submo del added in Step 5. It is b ecause R ′ B ( t ′ ) = ∅ for every B = { 1 } . F or every t ∈ T 1 , M , t ⊨ p ∧ q , and there is no world in S satisfying the min term ¬ p ∧ q , but ¬ p ∧ q ∈ TC ( γ ) . The mo del construction fails. Therefore, the conclusion of uniform interpolation b ecomes unav ailable for K45 n DPC . The uniform interpolation property for this system is left op en. 7 Conclusion W e hav e established the conclusions that distributed knowledge mo dal logics hav e the uniform in terp olation prop erty . Extending b oth the bisim ulation-quantier approach and sev eral syntactic tec hniques—canonical form ulas, literal elimination, and the pruning op eration—w e ha v e sho wn ho w uniform interpolants can be constructed as the results of forgetting. This strengthens and generalizes earlier results on uniform interpolation in multi-agen t mo dal logics by incorp orating the distributed knowledge mo dality and also the prop ositional common kno wledge cases, which are summarized in T able 2. Beyond the question of uniform in terp olation in distributed kno wledge, our analysis also claries the role of canonical forms in handling epistemic mo dalities. The pro ofs giv e rise to an open problem: in K45 n D , KD45 n D , and S5 n D , is 2 k + 1 a strict low er b ound on the depth necessary for a uniform interpolant of a form ula of depth k + 1 ? F urthermore, the current constructions are not practically ecien t, so a natural next step is to seek algorithmic renemen ts that allow for more computationally feasible construction of interpolants. Another promising direction is to inv estigate ho w these metho ds extend to ric her epistemic languages, suc h as those with group knowledge or dynamic epistemic logics. A THE DETERRED PR OOFS 29 K D T K45 KD45 S5 L K n √ √ √ √ √ √ L D √ √ √ √ √ √ L D (depth = 1) √ √ √ √ √ √ L D ( |A| = 2 ) √ √ √ √ √ √ L D PC √ √ √ ? ? √ T able 2: The rst line contains the conclusions from [FLvD19] where L K n is the m ulti-agent mo dal language without distributed kno wledge or common knowledge. “ √ ” stands for uniform in terp ola- tion. “ ” means every form ula and its uniform in terp olants share the same mo dal depth. A The deterred pro ofs Lemma 3.3 (the A dequacy Lemma of Collective p -Bisim ulation) . Let ( M , s ) and ( M ′ , s ′ ) b e tw o mo dels, p ∈ P , and ϕ b e an y L D C form ula without p o ccurring. If ( M , s ) ↔ col p ( M ′ , s ′ ) , then M , s ⊨ ϕ ⇐ ⇒ M ′ , s ′ ⊨ ϕ . Pr o of. W e will prov e by induction on the structure of ϕ . Let ρ be the collectiv e p -bisim ulation b etw een ( M , s ) and ( M ′ , s ′ ) . • ϕ is an atom q for q ∈ P \ { p } : Since ( s, s ′ ) ∈ ρ and by the Atoms condition, we ha ve M , s ⊨ q ⇐ ⇒ M ′ , s ′ ⊨ q . • ϕ is in the form ¬ ψ : Supp ose M , s ⊨ ¬ ψ . Then, M , s ⊨ ψ . Observe that p do es not o ccur in ψ . By the inductive h yp othesis, M ′ , s ′ ⊨ ψ . Then, M ′ , s ′ ⊨ ¬ ψ . The other direction is symmetric. So, M , s ⊨ ϕ ⇐ ⇒ M ′ , s ′ ⊨ ϕ . • ϕ is in the form ψ ∧ χ : Supp ose M , s ⊨ ψ ∧ χ . Then, M , s ⊨ ψ and M , s ⊨ χ . Observ e that p o ccurs neither in ψ nor in χ . By the inductiv e h yp othesis, M ′ , s ′ ⊨ ψ and M ′ , s ′ ⊨ χ . Then, M ′ , s ′ ⊨ ψ ∧ χ . The other direction is symmetric. So, M , s ⊨ ϕ ⇐ ⇒ M ′ , s ′ ⊨ ϕ . • ϕ is in the form D B ψ : Supp ose that ( M , s ) ⊨ ϕ . Then, there exists t ∈ R B ( s ) such that ( M , t ) ⊨ ψ . By ( M , s ) ↔ col p ( M ′ , s ′ ) , there exists t ′ ∈ R ′ B ( s ′ ) s.t. ( t, t ′ ) ∈ ρ . By the inductive h yp othesis, M ′ , t ′ ⊨ ¬ ψ . So, M ′ , s ′ ⊨ ϕ . The other direction is symmetric. Therefore, M , s ⊨ ϕ ⇐ ⇒ M ′ , s ′ ⊨ ϕ . • ϕ is in the form C ψ : Suppose that ( M , s ) ⊨ ϕ . Then, there exists t ∈ TC ( s ) such that ( M , t ) ⊨ ψ . Then, there is a path s = t 0 , t 1 , . . . , t l = t suc h that for every i ∈ { 0 , . . . , l − 1 } , there is B i ∈ P + ( A ) such that ( t i , t i +1 ) ∈ R B i . Let’s pro ceed by induction on l . – Base case ( l = 1 ): By the F orth condition, there is t ′ ∈ R B 0 ( s ′ ) ⊆ TC ( s ′ ) such that ( t, t ′ ) ∈ ρ . – Inductive steps : By the inductive h yp othesis on l , there is t ′ l − 1 ∈ TC ( s ′ ) such that ( t l − 1 , t ′ l − 1 ) ∈ ρ . By the F orth condition, there is t ′ ∈ R B 0 ( t ′ l − 1 ) ⊆ TC ( s ′ ) suc h that ( t, t ′ ) ∈ ρ . A THE DETERRED PR OOFS 30 By the inductive h yp othesis, M ′ , t ′ ⊨ ¬ ψ . So, M ′ , s ′ ⊨ ϕ . The other direction is similar. Therefore, M , s ⊨ ϕ ⇐ ⇒ M ′ , s ′ ⊨ ϕ . Hence, the A dequacy Lemma is prov ed. Prop osition 3.5. F or ev ery modal system L , if it is closed under forgetting, then it has the uniform in terp olation prop ert y . More precisely , for every P ⊆ P , every p ∈ P , every L -satisable formula ϕ o ver P , and ev ery L -satisable ψ o v er P \ { p } , if d f or g et L ( ϕ, p ) ≡ L ψ , then ψ is a uniform in terp olant of ϕ in L ov er P \ { p } . Pr o of. W e need to verify that ψ meets the denition of uniform interpolant (Denition 3.1). Let χ b e any form ula without p o ccurring. • Supp ose ψ ⊨ L χ . Let ( M , s ) b e any L -mod el of ϕ . It is easy to see that ( M , s ) ↔ col p ( M , s ) . Then by the F orth condition of forgetting, M , s ⊨ ψ . So, ϕ ⊨ L ψ . Therefore, ϕ ⊨ L χ . • Supp ose ϕ ⊨ L χ . F or every L -mo del ( M ′ , s ′ ) of ψ , b y the Back condition forgetting, there is an L -mo del ( M , s ) such that M , s ⊨ ϕ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Since ϕ ⊨ L χ , we hav e M , s ⊨ χ . Then b y Lemma 3.3 (the Adequacy Lemma), M ′ , s ′ ⊨ χ . So, ψ ⊨ L χ . Therefore, ϕ ⊨ L χ if and only if ψ ⊨ L χ . Hence, ψ is a uniform in terp olant of ϕ in L ov er P \ { p } . F act 3.6. F or every L -satisiable formulas ϕ 1 , ϕ 2 , and p ∈ P , d f or g et L ( ϕ 1 ∨ ϕ 2 , p ) ≡ L d f or g et L ( ϕ 1 , p ) ∨ d f or g et L ( ϕ 2 , p ) . Pr o of. “ ⇒ ” . Let ( M ′ , s ′ ) b e any L -mo del of d f org et L ( ϕ 1 ∨ ϕ 2 , p ) . By the Back condition of Denition 3.4, there is an L -mo del ( M , s ) suc h that ( M , s ) ↔ col p ( M ′ , s ′ ) and M , s ⊨ ϕ 1 ∨ ϕ 2 . W.l.o.g., w e assume M , s ⊨ ϕ 1 . By the F orth condition of Denition 3.4, M ′ , s ′ ⊨ d f org et L ( ϕ 1 , p ) . Then, M ′ , s ′ ⊨ d f or g et L ( ϕ 1 , p ) ∨ d f or g et L ( ϕ 2 , p ) . “ ⇐ ” . Let ( M ′ , s ′ ) b e an y L -mo del of d f or g et L ( ϕ 1 , p ) ∨ d f or g et L ( ϕ 2 , p ) . W.l.o.g., we assume M ′ , s ′ ⊨ d f or g et L ( ϕ 1 , p ) . By the Bac k condition of Denition 3.4, there is an L -mo del ( M , s ) such that ( M , s ) ↔ col p ( M ′ , s ′ ) and M , s ⊨ ϕ 1 . Then, M , s ⊨ ϕ 1 ∨ ϕ 2 . By the F orth condition of Denition 3.4, M ′ , s ′ ⊨ d f or g et L ( ϕ 1 ∨ ϕ 2 , p ) . Hence, d f org et L ( ϕ 1 ∨ ϕ 2 , p ) ≡ L d f or g et L ( ϕ 1 , p ) ∨ d f or g et L ( ϕ 2 , p ) . Prop osition 3.8. Let L b e any mo dal system, δ ∈ D P k ( L ) where k ∈ N , and P ⊆ P is nite. Let ϕ ∈ L D suc h that dep ( ϕ ) ≤ k and P ( ϕ ) ⊆ P . Then, either δ ⊨ L ϕ or δ ⊨ L ¬ ϕ . Pr o of. Let’s pro ve b y induction on ϕ . Base: Supp ose ϕ is an atom. As P ( ϕ ) ⊆ P and w ( δ ) is a minterm of P , it is obvious that either δ ⊨ L ϕ or δ ⊨ L ¬ ϕ . Inductiv e step: Supp ose ϕ is in the form ¬ ψ . By the inductiv e hypothesis, either δ ⊨ L ψ or δ ⊨ L ¬ ψ . If δ ⊨ L ¬ ψ , then δ ⊨ L ϕ . If δ ⊨ L ψ , observe that in every mo dal system L within our discussion, ¬ ϕ = ψ , so δ ⊨ L ¬ ϕ . Supp ose ϕ is in the form ψ 1 ∧ ψ 2 . If δ ⊨ L ψ 1 and δ ⊨ L ψ 2 , then δ ⊨ L ϕ . Otherwise, without loss of generality , w e assume δ ⊨ L ¬ ψ 1 . Then, δ ⊨ L ¬ ψ 1 ∨ ¬ ψ 2 . Then, δ ⊨ L ¬ ( ψ 1 ∧ ψ 2 ) . Supp ose ϕ is in the form D B ψ . Note that 1 ≤ dep ( ϕ ) ≤ k . By the inductive hypothesis, there are tw o p ossible cases: A THE DETERRED PR OOFS 31 • There is η 0 ∈ R B ( δ ) suc h that η 0 ⊨ L ¬ ψ : F or an y L -model ( M , s ) , if M , s ⊨ δ , then M , s ⊨ ˆ D B R B ( δ ) . There exists t 0 ∈ R B ( s ) such that M , t 0 ⊨ η 0 . By η 0 ⊨ L ¬ ψ , M , t 0 ⊨ ¬ ψ . So, M , s ⊨ ˆ D B ¬ ψ . Therefore, M , s ⊨ ¬ D B ψ • F or an y η ∈ R B ( δ ) , η ⊨ L ψ : F or an y L -mo del ( M , s ) , if M , s ⊨ δ , then M , s ⊨ D B R B ( δ ) . F or any t ∈ R B ( s ) , there exists γ ∈ R B ( δ ) suc h that M , t ⊨ γ . Because “for any η ∈ R B ( δ ) , η ⊨ L ψ ”, we hav e that γ ⊨ L ψ . Note that R B ( δ ) ⊨ L γ . So, R B ( δ ) ⊨ L ψ . According to Axiom K , w e hav e D B R B ( δ ) ⊨ L D B ψ . (In the sp ecial case where R B ( s ) = R B ( δ ) = ∅ , observ e that ∇ B R B ( δ ) = D B ⊥ . As ⊨ L ⊥ → ψ , w e hav e ⊨ L D B ( ⊥ → ψ ) . According to Axiom K , we ha ve that ⊨ L D B ⊥ → D B ψ .) Therefore, M , s ⊨ D B ψ . Therefore, either δ ⊨ L ϕ or δ ⊨ L ¬ ϕ . Prop osition 3.9. Let ( M , s ) b e a p oin ted mo del and k ∈ N . Let P ⊆ P b e nite. Then, there exists a unique δ ∈ D P k suc h that M , s ⊨ δ . Pr o of. Let’s pro ve b y induction on k . • Base case ( k = 0 ): Let δ b e p ∈ P and M,s ⊨ p p ∧ p ∈ P and M,s ⊨ p ¬ p Ob viously , this δ is unique with regard to ( M , s ) . • Inductive step ( k > 0 ): Let w ( δ ) be p ∈ P and M,s ⊨ p p ∧ p ∈ P and M,s ⊨ p ¬ p F or an y B ∈ P + ( A ) and t ∈ R B ( s ) , b y the hypothesis, there exists a unique η ∈ D P k − 1 suc h that M , t ⊨ η . Let Φ B ( δ ) b e the set of these unique η ’s in D P k − 1 . In the sp ecial case where R B ( s ) = ∅ , let Φ B ( δ ) = ∅ . Then, let δ = w ( δ ) ∧ B∈ P + ( A ) ∇ B Φ B ( δ ) Then, M , s ⊨ δ . Note that w ( δ ) is unique and b y the inductive hypothesis, Φ B ( δ ) is unique with regard to R B ( s ) . Therefore, δ is unique. Prop osition 3.10. Let L b e an y mo dal system, ϕ ∈ L D , k ≥ dep ( ϕ ) , and P = P ( ϕ ) . Then, there exists a unique set Φ ⊆ D P k ( L ) such that ϕ ≡ L Φ . Pr o of. The proof consists of the follo wing t wo parts: A THE DETERRED PR OOFS 32 • Existence : Let Φ = { δ | δ ⊨ L ϕ and δ ∈ D P k ( L ) } . On the one hand, it is obvious that Φ ⊨ L ϕ . On the other hand, for any mo del ( M , s ) , if M , s ⊨ ϕ , b y Prop osition 3.9, there exists δ 0 ∈ D P k ( L ) such that M , s ⊨ δ 0 . By Prop osition 3.8, for an y δ ′ ∈ D P k ( L ) − Φ , δ ′ ⊨ L ¬ ϕ . So, δ 0 ∈ Φ . So, M , s ⊨ Φ . Therefore, ϕ ≡ L Φ . • Uniqueness : Supp ose there is another Φ ′ suc h that Φ ′ ≡ L ϕ . Let δ 1 ∈ Φ ′ − Φ . By the construction of Φ , δ 1 ⊨ L ¬ ϕ . That means there is a mo del ( M 1 , s 1 ) of δ 1 suc h that M 1 , s 1 ⊨ Φ ′ and M 1 , s 1 ⊨ ¬ ϕ and then M 1 , s 1 ⊨ ¬ ϕ ∧ ϕ . This is contradictory . Conv ersely , let δ 2 ∈ Φ − Φ ′ and ( M 2 , s 2 ) b e an y mo del of δ 2 . Because δ 2 ∈ D P k ( L ) and by Prop osition 3.9, δ 2 is the unique element of D P k ( L ) suc h that M 2 , s 2 ⊨ δ 2 . So M 2 , s 2 ⊨ Φ ′ . Note that M 2 , s 2 ⊨ ϕ . This is contradictory to “ Φ ′ ≡ L ϕ ” . Therefore, Φ = Φ ′ . Hence, this proposition is prov ed. Prop osition 3.11. Let B , C ∈ P + ( X ) such that B ⊊ C . 1. F or ev ery model ( M , s ) , R C ( s ) ⊆ R B ( s ) . 2. F or ev ery satisable d-canonical formula δ , R C ( δ ) ⊆ R B ( δ ) . Pr o of. F or ev ery model ( M , s ) , observe that R C ( s ) = i ∈C R i ( s ) ⊆ i ∈B R i ( s ) = R B ( s ) So, item 1 holds. Supp ose δ ∈ D P k suc h that M , s ⊨ δ and k ≥ 1 . F or ev ery η ∈ R C ( δ ) , by the semantics, there is t ∈ R C ( s ) suc h that M , t ⊨ η . As R C ( s ) ⊆ R B ( s ) , t ∈ R B ( s ) . Then, there is η 0 ∈ R B ( δ ) ⊆ D P k − 1 suc h that M , t ⊨ η 0 . By Prop osition 3.9, η = η 0 . Therefore, R C ( δ ) ⊆ R B ( δ ) . Prop osition 3.13. Let P ⊆ P b e nite and let δ ∈ D P k . Then, for any l < k and B ∈ P + ( A ) , R B ( δ ↓ l ) = R B ( δ ) ↓ l . Pr o of. Let’s pro ve b y induction on l . • Base : When l = 1 , R B ( δ ↓ ) = ( R B ( δ )) ↓ b y Denition 3.12. • inductive step : By the h yp othesis, R B ( δ ↓ l − 1 ) = R B ( δ ) ↓ l − 1 . Then, R B ( δ ↓ l ) = R B (( δ ↓ l − 1 ) ↓ ) = R B ( δ ↓ l − 1 ) ↓ = ( R B ( δ ) ↓ l − 1 ) ↓ = ( R B ( δ )) ↓ l . Therefore, for an y l < k and B ∈ P + ( A ) , R B ( δ ↓ l ) = R B ( δ ) ↓ l . Prop osition 3.14. Consider the context of a modal system L . F or ev ery δ ∈ D P k ( L ) and k , l ∈ N , if k ≥ l , then the following prop erties hold: 1. δ ⊨ δ ↓ l . 2. δ ↓ l ∈ D P k − l ( L ) . 3. δ ↑ l ∈ D P l ( L ) . A THE DETERRED PR OOFS 33 4. F or ev ery h ∈ N and γ ∈ D P k + h ( L ) , γ ↓ h = γ ↑ k = ( γ ↓ h ) ↑ k . 5. F or k 1 , k 2 ∈ N , if l ≤ min { k, k 1 , k 2 } , then ( δ ↑ k 1 ) ↑ l = ( δ ↑ k 2 ) ↑ l . Pr o of. F or item 1: Let’s rst prov e that δ ⊨ δ ↓ b y induction on k . When k ≤ 1 , then w ( δ ) = δ ↓ , so δ ⊨ δ ↓ . Suppose k > 1 and ( M , s ) b e any mo del of δ . Observ e that w ( δ ↓ ) = w ( δ ) , so M , s ⊨ w ( δ ↓ ) . Let B ∈ P + ( A ) . • F or ev ery t ∈ R B ( s ) , since M , s ⊨ ∇ B R B ( δ ) , there is η ∈ R B ( δ ) ⊆ D P k − 1 ( L ) such that M , t ⊨ η . Note that, η ↓ ∈ R B ( δ ) ↓ = R B ( δ ↓ ) . By the inductiv e h yp othesis on k , η ⊨ η ↓ . Therefore, M , s ⊨ D B R B ( δ ↓ ) . • F or every γ ∈ R B ( δ ↓ ) = R B ( δ ) ↓ , there is η ∈ R B ( δ ) ⊆ D P k − 1 ( L ) such that η ↓ = γ . By the inductiv e h yp othesis on k , η ⊨ γ . As M , s ⊨ ∇ B R B ( δ ) , there is t ∈ R B ( s ) such that M , t ⊨ η . So, M , t ⊨ γ . Therefore, M , s ⊨ ˆ D B R B ( δ ↓ ) . Therefore, δ ⊨ δ ↓ . F or ev ery l > 0 , b y the denition, δ ↓ l = ( δ ↓ l − 1 ) ↓ , so δ ↓ l − 1 ⊨ δ ↓ l . Inductiv ely , we ha ve that δ ⊨ δ ↓ l . F or item 2: Let’s rst pro ve “ δ ↓ l ∈ D P k − l ” by induction on l . Supp ose item 2 holds for every l ∈ { 0 , . . . , k − 1 } . By Prop osition 3.13, δ ↓ l = ( δ ↓ l − 1 ) ↓ = w ( δ ↓ l − 1 ) ∧ B∈ P + ( A ) ∇ B ( R B ( δ ↓ l − 1 )) ↓ By the inductive hypothesis, R B ( δ ↓ l − 1 ) ⊆ D P k − 1 − l . Therefore, δ ↓ l ∈ D P k − l . Since δ is L -satisable and by item 1, we ha ve δ ↓ l ∈ D P k − l ( L ) . F or item 3: Let’s rst pro ve “ δ ↑ l ∈ D P l ” by induction on l . If l = 0 , by Denition 3.12, δ ↑ 0 = w ( δ ) ∈ D P 0 . Supp ose l > 0 . By the inductive hypothesis, for every B ∈ P + ( A ) , R B ( δ ) ↑ ( l − 1) ⊆ D P l − 1 . Then, δ ↑ l ∈ D P l . By item 2, δ ↓ ( k − l ) ∈ D P k − ( k − l ) ( L ) = D P l ( L ) ⊆ D P l . By Prop osition 3.9, δ ↑ l = δ ↓ ( k − l ) . Therefore, δ ↑ l ∈ D P l ( L ) F or item 4: This is a corollary of items 2 and 3. Observ e that dep ( γ ↓ h ) ≤ k . By Denition 3.12, ( γ ↓ h ) ↑ k = γ ↓ h . Therefore, γ ↓ h = γ ↑ k = ( γ ↓ h ) ↑ k . F or item 5: By item 3, it is easy to see that ( δ ↑ k 1 ) ↑ l , ( δ ↑ k 1 ) ↑ l ∈ D P l ( L ) . By Prop osition 3.9, ( δ ↑ k 1 ) ↑ l = ( δ ↑ k 2 ) ↑ l . Prop osition 3.17. If δ ∈ D P k and p is an atom, then, δ ⊨ δ p Pr o of. Let ( M , s ) b e a mo del of δ . Let’s prov e b y induction on k . • Base ( k = 0 ): δ is a minterm. δ p is the remaining part of δ after deleting the literal p or ¬ p , so M , s ⊨ δ p . • inductive step ( k > 0 ): Similar to the inductive base, M , s ⊨ w ( δ p ) . Let B ∈ P + ( A ) . – F or every γ ∈ R B ( δ p ) , b y the denition, there is η ∈ R B ( δ ) ⊆ D P k − 1 suc h that η p = γ . By the h yp othesis, η ⊨ η p . Because M , s ⊨ δ , there is t ∈ R B ( s ) such that M , t ⊨ η . So, M , t ⊨ η p . Therefore, M , s ⊨ ˆ D B R B ( δ p ) . – F or ev ery t ∈ R B ( s ) , b ecause M , s ⊨ δ , there is η ∈ R B ( δ ) ⊆ D P k − 1 suc h that M , t ⊨ η . By the hypothesis, η ⊨ η p . So, M , t ⊨ η p . Therefore, M , s ⊨ D B R B ( δ p ) . Therefore, M , s ⊨ w ( δ p ) ∧ B∈ P + ( A ) ∇ B R B ( δ p ) . A THE DETERRED PR OOFS 34 Hence, δ ⊨ δ p . Lemma 4.2. Let δ ∈ D P k ( T n D ) for k ≥ 1 . Let l ∈ { 1 , . . . , k } . Then, for all B ∈ P + ( A ) , w e ha ve δ ↓ l ∈ R B ( δ ↓ ( l − 1) ) and δ ↑ ( l − 1) ∈ R B ( δ ↑ l ) . Pr o of. Since δ ∈ D P k ( T n D ) , there is a T n D -mo del ( M , s ) suc h that M , s ⊨ δ . By Proposition 3.14, we hav e M , s ⊨ δ ↓ ( l − 1) and M , s ⊨ δ ↓ l . Since ( M , s ) is reexiv e, then s ∈ R B ( s ) and there exists η ∈ R B ( δ ↓ ( l − 1) ) suc h that M , s ⊨ η . Note that b oth δ ↓ l and η b elong to D P k − l . By Prop osition 3.9, they are the unique canonical formula of D P k − l for ( M , s ) , that is, δ ↓ l = η . Therefore, δ ↓ l ∈ R B ( δ ↓ ( l − 1) ) . When l = k , we ha ve δ ↓ (( k − l )+1) ∈ R B ( δ ↓ ( k − l ) ) and b y Prop osition 3.14, δ ↑ ( l − 1) ∈ R B ( δ ↑ l ) ; note that δ ↑ ( k − 1) = δ ↓ ∈ R B ( δ ) = R B ( δ ↑ k ) . Therefore, δ ↑ ( l − 1) ∈ R B ( δ ↑ l ) . Prop osition 5.1. F or any k ≥ 2 , there is δ k cou ∈ D P k ( S5 n D ) and a S5 n D -mo del ( M ′ , s ′ ) of ( δ k cou ) p suc h that for any K45 n D -mo del ( M , s ) , the following t wo do not hold sim ultaneously: • ( M , s ) ⊨ δ k cou , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Th us, ( δ k cou ) p ≡ L d f or g et L ( δ k cou , p ) , for L among K45 n D , KD45 n D , and S5 n D . Pr o of. Let’s construct δ k cou b y an S5 n D -mo del ( M k , s k ) and then let δ k cou is the unique member of D P k ( S5 n D ) such that M k , s k ⊨ δ k cou . W e write “ { x, y } ∈ R B ” instead of “ ( x, y ) , ( y , x ) ∈ R B ” . Consider the model ( M 2 , s 2 ) = ( S, R, V , s 2 ) satisfying the follo wing: • S = { s 2 , t 1 , t 2 , t 3 , t 4 , v , w } . • F or ev ery x, y ∈ { s 2 , t 1 , t 2 , t 3 , t 4 } , { x, y } ∈ R 1 ; { t 1 , t 3 } , { t 2 , t 4 } ∈ R 2 ; { t 1 , w } , { t 4 , v } ∈ R 3 . F or ev ery x ∈ S , ( x, x ) ∈ R A . These are all the accessibility relations. • V is giv en b y the follo wing: – M 2 , x ⊨ ¬ p ∧ ¬ q , for x ∈ { t 1 , s 2 , v } , – M 2 , t 2 ⊨ p ∧ ¬ q , – M 2 , x ⊨ ¬ p ∧ q , for x ∈ { t 3 , w } , – M 2 , t 4 ⊨ p ∧ q . Th us, ( M 2 , s 2 ) is an S5 n D -mo del. Let δ 2 cou b e the unique member of D P 2 ( S5 n D ) such that M 2 , s 2 ⊨ δ 2 cou . F or x ∈ { 1 , 2 , 3 , 4 } , let η x b e the unique member of R 1 ( δ 2 cou ) ⊆ D P 1 ( S5 n D ) such that M , t x ⊨ η x . Let η 0 = ( δ 2 cou ) ↓ . Note that η 0 , η 1 , η 2 , η 3 , η 4 are mutully inequiv alen t. Let’s consider the mo del ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) of ( δ 2 cou ) p . S ′ is a copy of S and s ′ is a copy of s 2 . Ev ery w orld x ′ ∈ S ′ inherits the v alue of x on q . Ev ery accessibilit y relation is also inherited except that • { t ′ 1 , t ′ 4 } ∈ R ′ 2 but { t ′ 1 , t ′ 3 } / ∈ R ′ 2 , • { t ′ 2 , t ′ 3 } ∈ R ′ 2 but { t ′ 2 , t ′ 4 } / ∈ R ′ 2 , A THE DETERRED PR OOFS 35 Ho wev er, we can see that for every x ∈ { 1 , 2 , 3 , 4 } , M ′ , t ′ x ⊨ η p x and M ′ , s ′ ⊨ η p 0 . The key point is that, for example, R { 1 , 2 } ( η 1 ) = {¬ q , q } but b oth M ′ , t ′ 3 ⊨ q and M ′ , t ′ 4 ⊨ q . Therefore, w e hav e M ′ , s ′ ⊨ ( δ 2 cou ) p . Note that η p 0 , η p 1 , η p 2 , η p 3 , η p 4 are still mutully inequiv alen t. Supp ose there exists K45 n D -mo del ( M , s ) so that b oth ( M , s ) ⊨ δ 2 cou and ( M , s ) ↔ col p ( M ′ , s ′ ) . Since M , s ⊨ δ 2 cou , dene H x = { t ∈ R 1 ( s ) | M , t ⊨ η x } for x ∈ { 0 , 1 , 2 , 3 , 4 } . Since η 0 , η 1 , η 2 , η 3 , η 4 are mutually inequiv alen t and by Prop osition 3.9, H 0 , H 1 , H 2 , H 3 , H 4 are mutually disjoin t. Let ρ b e the relation that witnesses ( M , s ) ↔ col p ( M ′ , s ′ ) . Observ e that, for any x, y ∈ { 0 , 1 , 2 , 3 , 4 } , if x = y , then η x ⊨ η p x but η x ⊨ ¬ η p y . Observe that, for any world z ∈ R 1 ( s ) and z ′ ∈ S ′ , if ( z , z ′ ) ∈ ρ , then M , z ⊨ η x ⇐ ⇒ M ′ , z ′ ⊨ η p x . Therefore, we ha ve • z ∈ H 0 ⇐ ⇒ ( z , s ′ ) ∈ ρ , • z ∈ H x ⇐ ⇒ ( z , t ′ x ) ∈ ρ . Let t b e any w orld in H 2 . Th us, M , t ⊨ η 2 and ( t, t ′ 2 ) ∈ ρ . Note that p ∧ q ∈ R { 1 , 2 } ( η 2 ) . There is u ∈ S suc h that M , u ⊨ p ∧ q and u ∈ R { 1 , 2 } ( t ) . Note that u ∈ R { 1 , 2 } ( t ) ⊆ R 1 ( t ) . Since ( M , s ) is a K45 n -mo del, the relation R 1 is transitive. So, u ∈ R 1 ( s ) . Ev ery w orld in H 0 ∪ H 1 ∪ H 2 ∪ H 3 do es not satisfy p ∧ q . Therefore, u ∈ H 4 . Since ( t, t ′ 2 ) ∈ ρ , b y the F orth condition of p -bisim ulation, there is u ′ ∈ R ′ { 1 , 2 } ( t ′ 2 ) such that ( u, u ′ ) ∈ ρ . Ho wev er, the only elements of R ′ { 1 , 2 } ( t ′ 2 ) are t ′ 2 and t ′ 3 . So, u ′ is either t ′ 2 or t ′ 3 , and then u ∈ H 2 ∪ H 3 . This is con tradictory to the fact that u ∈ H 4 , b ecause H 0 , H 1 , H 2 , H 3 , H 4 are mutually disjoin t. Hence, “ ( M , s ) ⊨ δ 2 cou ” and “ ( M , s ) ↔ col p ( M ′ , s ′ ) ” cannot hold simultaneously for any K45 n - mo del ( M , s ) . When k > 2 , let’s add the follo wing new worlds s 3 , . . . , s k to S such that for h ∈ { 3 , . . . , k } • { s h − 1 , s h } ∈ R 1 if h is ev en, while { s h − 1 , s h } ∈ R 2 if h is o dd; • p, q / ∈ V ( s h ) if h is even, while p, q ∈ V ( s h ) if h is o dd; • ( s h , s h ) ∈ R A . Let M k b e the new mo del and s k b e the new actual w orld. let δ k cou is the unique member of D P k ( S5 n D ) such that M k , s k ⊨ δ k cou . W e can similarly pro ve the conclusion for δ k cou . Since δ k cou breac hes the Back condition of Denition 3.4, we ha ve that ( δ k cou ) p ≡ L d f or g et L ( δ k cou , p ) , for every k ≥ 2 and L among K45 n D , KD45 n D , and S5 n D . Prop osition 5.2. Let δ 2 cou and ( M ′ , s ′ ) b e dened as in Prop osition 5.1. F or all S5 n D -satiable d-canonical formulas γ and ξ such that dep ( γ ) , dep ( ξ ) > 2 , if • ( ξ ↑ 2 ) p = ( δ 2 cou ) p and M ′ , s ′ ⊨ ξ p , • γ ↑ 2 = δ 2 cou , then γ = ξ . A THE DETERRED PR OOFS 36 Pr o of. Supp ose there is S5 n D -satiable γ suc h that γ ↑ 2 = δ 2 cou and γ = ξ . Let ( M , s ) = ( S, R, V , s ) b e any K45 n D -mo del of γ . Since γ ↑ 2 = δ 2 cou , then M , s ⊨ δ 2 cou . The formulas η 0 , η 1 , η 2 , η 3 , η 4 are the same as in Prop osition 5.1 and we also partition R 1 ( s ) into H 0 , H 1 , H 2 , H 3 , H 4 . Let t ∈ H 2 and η t is the mem b er of R 1 ( γ ) such that M , t ⊨ η t . Note that η ↑ t = η 2 . Because w ( η 4 ) ∈ R { 1 , 2 } ( η 2 ) , then R { 1 , 2 } ( t ) ∩ H 4 = ∅ . Let u ∈ R { 1 , 2 } ( t ) ∩ H 4 and η u is the member of R 1 ( γ ) such that M , u ⊨ η u . Since u ∈ R { 1 , 2 } ( t ) , w e hav e η ↓ u ∈ R { 1 , 2 } ( η t ) ; since u ∈ H 4 , we ha ve η ↑ u = η 4 . Since γ = ξ and M ′ , s ′ ⊨ ξ p , then we ha ve M ′ , t ′ 2 ⊨ η p t . Since η ↓ u ∈ R { 1 , 2 } ( η t ) and R { 1 , 2 } ( t ′ 2 ) = { t ′ 2 , t ′ 3 } , either M ′ , t ′ 2 ⊨ η p u or M ′ , t ′ 3 ⊨ η p u . Then, either M ′ , t ′ 2 ⊨ η p 4 or M ′ , t ′ 3 ⊨ η p 4 . This is con tradictory to the pro of of Proposition 5.1. Therefore, γ = ξ . F act A.1. Let M = ( S, R, V ) b e a transitiv e and Euclidean mo del. F or every t 1 , t 2 ∈ S and B ∈ P + ( A ) , if t 2 ∈ R B ( t 1 ) , then R B ( t 1 ) = R B ( t 2 ) . Pr o of. F or every u ∈ R B ( t 2 ) , since ( t 1 , t 2 ) , ( t 2 , u ) ∈ R B and R B is transitiv e, then u ∈ R B ( t 1 ) . R B ( t 1 ) ⊇ R B ( t 2 ) . F or every u ∈ R B ( t 1 ) , since ( t 1 , u ) , ( t 1 , t 2 ) ∈ R B and R B is Euclidean, then u ∈ R B ( t 2 ) . So, R B ( t 1 ) ⊆ R B ( t 2 ) . Therefore, R B ( t 1 ) = R B ( t 2 ) . Prop osition 5.4 (Identical Successors Property) . Let δ b e a D P k ( K45 n D ) for k ≥ 2 . Let l ∈ N s.t. 1 ≤ l < k . Then, for all B ∈ P + ( A ) and η ∈ R B ( δ ) , R B ( δ ) ↓ l = R B ( η ) ↓ l − 1 . Pr o of. Let ( M , s ) b e any K45 n D -mo del of δ . Then, there is t ∈ R B ( s ) suc h that M , t ⊨ η . By F act A.1, R B ( s ) = R B ( t ) . Note that R B ( s ) is R B ( δ ) -complete and R B ( t ) is R B ( η ) -complete. Therefore, R B ( s ) is b oth R B ( δ ) -complete and R B ( η ) -complete. Note that R B ( δ ) ⊆ D P k and R B ( η ) ⊆ D P k − 1 . By Prop osition 3.14, we ha ve that R B ( δ ) ↓ l ⊆ D P k − l , R B ( η ) ↓ l − 1 ⊆ D P k − l , and R B ( s ) is b oth R B ( δ ) ↓ l - complete and R B ( η ) ↓ l − 1 -complete. Observe that b y Prop osition 3.9, there is a unique subset Φ of D P k − l that R B ( s ) is Φ -complete. Hence, R B ( δ ) ↓ l = R B ( η ) ↓ l − 1 . Prop osition 5.5 (Sibling Prop erty) . Let δ ∈ D P k ( L ) where k ≥ 2 . Let B , C ∈ P + ( A ) such that C 1 = C ∩ B = ∅ and C 2 = C ∩ B c = ∅ . F or ev ery η ∈ R B ( δ ) and χ ∈ R C ( η ) , there is η 0 ∈ R C 1 ( δ ) suc h that • η ↓ 0 = χ ∈ R C ( η ) , • R D ( η 0 ) = R D ( η ) for ev ery D ∈ P + ( C 2 ) , Pr o of. Let ( M , s ) b e any L -mo del of δ . There is t ∈ R B ( s ) and t 0 ∈ R C ( t ) suc h that M , t ⊨ η and M , t 0 ⊨ χ . Note that R C ( t ) ⊆ R C 1 ( t ) . Since R C 1 is transitiv e, we hav e t 0 ∈ R C 1 ( s ) . Then, there is η 0 ∈ R C 1 ( δ ) suc h that M , t 0 ⊨ η 0 . • Note that R C ( η ) ⊆ R C 1 ( η ) and b y Prop osition 5.4 (the Iden tical Successors Property), R C 1 ( η ) = R C 1 ( δ ) ↓ . So χ ∈ R C 1 ( δ ) ↓ . Since M , t 0 ⊨ χ and M , t 0 ⊨ η 0 , and b y Proposition 3.9, we ha ve that χ = η ↓ 0 . • F or ev ery D ∈ P + ( C 2 ) , t 0 ∈ R C ( t ) ⊆ R C 2 ( t ) ⊆ R D ( t ) . Since R D is b oth transitive and Euclidean, then by F act A.1, we hav e R D ( t ) = R D ( t 0 ) . Then, R D ( t ) is R D ( η ) -complete while R D ( t 0 ) is R D ( η 0 ) -complete. Note that η , η 0 ∈ D P k − 1 . By Proposition 3.9, they are the unique subset of D P k − 2 . Therefore, R D ( η ) = R D ( η 0 ) Hence, the proposition is prov ed. A THE DETERRED PR OOFS 37 Prop osition 5.7. F or an y model M , these t wo claims are equiv alen t 1. for ev ery t in M and ev ery i ∈ A , R TC ( t, R i ∪ R − 1 i ) is quasi- i -equiv alent; 2. M is transitiv e and Euclidean. F urthermore, the follo wing are also equiv alent 3 for ev ery t in M and ev ery i ∈ A , R TC ( t, R i ∪ R − 1 i ) is i -equiv alen t; 4 M is transitiv e, Euclidean, and reexive. Pr o of. “ 1 ⇒ 2 ” . Let i ∈ A and u, v , w b e any w orlds in M . • Supp ose ( u, v ) , ( v , w ) ∈ R i . Then, v , w ∈ R TC ( u, R i ∪ R − 1 i ) . Because R TC ( u, R i ∪ R − 1 i ) is quasi- i -equiv alen t, we hav e R i ( u ) = R i ( v ) . So, w ∈ R i ( u ) , namely , ( u, w ) ∈ R i . • Supp ose ( u, v ) , ( u, w ) ∈ R i . Then, v , w ∈ R TC ( u, R i ∪ R − 1 i ) . Because R TC ( u, R i ∪ R − 1 i ) is quasi- i -equiv alent, we ha ve R i ( u ) = R i ( v ) . Since w ∈ R i ( u ) , then, w ∈ R i ( v ) , namely , ( v , w ) ∈ R i Hence, M is transitive and Euclidean. “ 2 ⇒ 1 ” . Let t be an y w orld in M and i ∈ A . Note that for ev ery u ∈ R TC ( t, R i ∪ R − 1 i ) , R TC ( t, R i ∪ R − 1 i ) = R TC ( u, R i ∪ R − 1 i ) . Let t 1 , t 2 b e any mem b ers of R TC ( t, R i ∪ R − 1 i ) . Then, there is a sequence t 1 = u 0 , u 1 , . . . u m 1 , u m = t 2 suc h that for every j ∈ { 0 , . . . , m − 1 } , either ( u j , u j +1 ) ∈ R i or ( u j +1 , u j ) ∈ R i . Let’s pro ve b y induction on m : • Base case ( m = 1 ): Since R i is both transitiv e and Euclidean, by F act A.1, we hav e R i ( u 0 ) = R i ( u 1 ) . • Inductive step ( m > 1 ): Since R i is b oth transitive and Euclidean, then b y F act A.1, we ha ve R i ( u m − 1 ) = R i ( u m ) . By the hypo ethesis, R i ( u 0 ) = R i ( u m − 1 ) . So, R i ( u 0 ) = R i ( u m ) . Therefore, R i ( t 1 ) = R i ( t 2 ) . Hence, R TC ( t, R i ∪ R − 1 i ) is quasi- i -equiv alen t. “ 3 ⇒ 4 ” . By “ 1 ⇒ 2 ”, M is transitive and Euclidean. F or ev ery t in M and every i ∈ A , since R TC ( t, R i ∪ R − 1 i ) is i -equiv alent, then ( t, t ) ∈ R i . So, M is reexive. “ 4 ⇒ 3 ” . F or ev ery t in M and ev ery i ∈ A , by “ 2 ⇒ 1 ”, R TC ( t, R i ∪ R − 1 i ) is quasi- i -equiv alen t. Since M is reexive, ( t, t ) ∈ R i . Then, R TC ( t, R i ∪ R − 1 i ) is i -equiv alen t. Prop osition A.2. Let M be an y Kripk e mo del, B ∈ P + ( A ) , and t b e any w orld in M . • If for ev ery i ∈ B , R TC ( t, R i ∪ R − 1 i ) is quasi- i -equiv alent, then R TC ( t, R B ∪ R − 1 B ) is quasi- B - equiv alen t. • If for every i ∈ B , R TC ( t, R i ∪ R − 1 i ) is i -equiv alen t, then R TC ( t, R B ∪ R − 1 B ) is B -equiv alent. Pr o of. Let u ∈ R TC ( t, R B ∪ R − 1 B ) . It is easy to see that R TC ( t, R B ∪ R − 1 B ) = R TC ( u, R B ∪ R − 1 B ) . F or i ∈ B , since R B ⊆ R i , then we hav e R TC ( t, R B ∪ R − 1 B ) ⊆ R TC ( t, R i ∪ R − 1 i ) ; since R TC ( t, R i ∪ R − 1 i ) is quasi- i -equiv alen t, then R i ( t ) = R i ( u ) . Therefore, R B ( t ) = i ∈B R i ( t ) = i ∈B R i ( u ) = R B ( u ) . Therefore, R TC ( t, R B ∪ R − 1 B ) is quasi- B -equiv alent. F urthermore, if for ev ery i ∈ B , R TC ( t, R i ∪ R − 1 i ) is i -equiv alen t, then ( u, u ) ∈ R i for eac h i ∈ B . Then, ( u, u ) ∈ R B . Then, R TC ( t, R B ∪ R − 1 B ) is B -equiv alent. A THE DETERRED PR OOFS 38 F act A.3. Giv en a Kripke model M and an y quasi- i -equiv alen t sets W 1 , W 2 , . . . , W m , 1. for ev ery u 1 , u 2 ∈ W 1 , if ( u 1 , u 2 ) / ∈ R i b efore merging, then ( u 1 , u 2 ) / ∈ R i after merging; 2. if there is at least one world u 0 ∈ W 1 ∪ W 2 ∪ · · · ∪ W m suc h that ( u 0 , u 0 ) ∈ R i , and w e merge them with the relation R i , then W 1 ∪ W 2 ∪ · · · ∪ W m b ecomes quasi- i -equiv alent; 3. if they are i -equiv alen t and w e merge them with the relation R i , then W 1 ∪ W 2 ∪ · · · ∪ W m b ecomes i -equiv alent. Pr o of. F or item 1, if ( u 1 , u 2 ) is added to R i after merging, then ( u 2 , u 2 ) ∈ R i but R i ( u 1 ) = R i ( u 2 ) b efore merging. This is con trary to the denition of quasi- i -equiv alence. F or item 2, let U j = { u | u ∈ W j and ( u, u ) ∈ R i } for every j ∈ { 1 , . . . , m } , and U = j ∈{ 1 ,...,m } U j . So, u 0 ∈ U . After merging, for every t ∈ W 1 ∪ W 2 ∪ · · · ∪ W m , ( t, u 0 ) ∈ R i , so W 1 ∪ W 2 ∪ · · · ∪ W m = R TC ( u 0 , R i ∪ R − 1 i ) = R TC ( t, R i ∪ R − 1 i ) . So after merging, for every t ∈ W 1 ∪ W 2 ∪ · · · ∪ W m , w e hav e R i ( t ) = U . Therefore, W 1 ∪ W 2 ∪ · · · ∪ W m b ecomes quasi- i -equiv alen t after merging. F or item 3, if each of W 1 , W 2 , . . . , W m is empty , then W 1 ∪ W 2 ∪ · · · ∪ W m is v acuously i -equiv alen t; otherwise, by item 1, W 1 ∪ W 2 ∪ · · · ∪ W m = U , so W 1 ∪ W 2 ∪ · · · ∪ W m b ecomes i -equiv alen t after merging. Lemma 5.11 (The Construction Lemma for K45 n D and KD45 n D ) . Let L be either K45 n D or KD45 n D . Let k , d, h be natural n umbers such that 0 ≤ k ≤ d ≤ h . Let γ , ξ ∈ D P k + h +1 ( L ) such that ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p . Let ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an L -mo del of ξ p . Giv en X ∈ P + ( A ) and the m ulti-p oin ted submo del ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed L -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } such that, • T B is B -equiv alent in ( M , U X ) , for B ∈ P + ( X ) ; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( γ ) ↑ k -complete for B ∈ P + ( X ) . Pr o of. Let’s construct b y induction on k and d . W e lab el the constructed mo del as ( M , U X ) γ ,ξ ,k,d , in order to sho w the four parameters’ change in the induction. The Greek letter η ranges ov er the d-canonical form ulas that wholly o ccur in γ , while the Greek letter ζ those that wholly occur in ξ . Initially , let S , V , ρ , and every relation R i b e empty . Base case ( k = d = 0 ) : Construct ( M , U X ) γ ,ξ , 0 , 0 as follows. Step 1 F or every B ∈ P + ( X ) , t ′ ∈ R ′ B ( s ′ ) , η ∈ R B ( γ ) , and ζ ∈ R B ( ξ ) , if ( η ↑ ( k + d ) ) p = ( ζ ↑ ( k + d ) ) p and M ′ , t ′ ⊨ ζ p , then construct a world t suc h that for every q ∈ P , q ∈ V ( t ) if and only if w ( η ) ⊨ q . Then, add ( t, t ′ ) to ρ . Let T ∗ B b e all suc h t with resp ect to this B . (Note that when a w orld t is constructed, w e can determine its unique t ′ , η , and ζ . Let’s write this η as η t and this ζ as ζ t . Let’s say t ′ (resp. η t , ζ t ) constructs t .) A THE DETERRED PR OOFS 39 Step 2 F or every B 1 , B 2 ∈ P + ( X ) , every t 1 ∈ T ∗ B 1 , t 2 ∈ T ∗ B 2 , and i ∈ B c 1 ∩ B c 2 , if ( t ′ 1 , t ′ 2 ) ∈ R ′ i , then add ( t 1 , t 2 ) to R i . Step 3 F or every B 1 , B 2 ∈ P + ( X ) , every t 1 ∈ T ∗ B 1 , t 2 ∈ T ∗ B 2 , and i ∈ B 1 ∩ B 2 , add ( t 1 , t 2 ) to R i . Step 4 F or every B ∈ P + ( X ) , let T B = B⊆C T ∗ C Extend S with B∈ P + ( X ) T B and let U X = { T B | B ∈ P + ( X ) } . Denote by ( M , U X ) γ ,ξ , 0 , 0 4 the submo del constructed via the rst four steps. Step 5 F or ev ery B ∈ P + ( X ) and every t ∈ T ∗ B , if there is i ∈ B c suc h that R ′ i ( t ′ ) = ∅ , consider the m ulti-p oin ted submo del ( M ′ , U t ′ B c ) , where U t ′ B c = { R ′ D ( t ′ ) | D ∈ P + ( B c ) } . Let ( M t , U t B c ) b e a cop y of ( M ′ , U t ′ B c ) and let ρ t = { ( u, u ′ ) | u is a cop y of u ′ . } . A dd the submo del ( M t , U t B c ) to ( S, R, V ) , and extend ρ to b e ρ ∪ ρ t . (Note that so far, no edge is added betw een t and ( M t , U t B c ) . W e write “ ( M t , U t B c ) ” as “ ( M t , U t ) ” if it is clear from con text.) Step 6 F or every B ∈ P + ( X ) , every t ∈ T ∗ B , ev ery i ∈ B c , let’s denote the set R TC ( t, R i ∪ R − 1 i ) within ( M , U X ) γ ,ξ , 0 , 0 4 b y R TC ( t, R i ∪ R − 1 i ) 4 . F or every u ∈ R TC ( t, R i ∪ R − 1 i ) 4 , if ( M u , U u ) exists, which is an L -mo del, there is the quasi- i -equiv alen t set W u i in ( M u , U u ) suc h that W u i ⊇ R ′ i ( u ′ ) . Then, merge all these sets W u i and R TC ( t, R i ∪ R − 1 i ) 4 with the relation R i . Th us, ( M , U X ) γ ,ξ , 0 , 0 is constructed. Observ e that this construction do es not sp ecify the v alue of d , so ( M , U X ) γ ,ξ , 0 ,d is also constructed for any d ≥ 0 . Inductiv e step : Steps 1, 3, and 4 are the same as those of the Base. W e sho w Steps 2, 5, and 6, where Step 2 is divided in to t wo substeps. Step 2-1 F or ev ery B ∈ P + ( X ) and every t ∈ T ∗ B that is constructed in Step 1, for every C ∈ P + ( A ) suc h that C 1 = B ∩ C = ∅ and C 2 = B c ∩ C = ∅ , and every u ′ ∈ R ′ C ( t ′ ) , we claim that there exists η ∈ R C 1 ( γ ) and ζ ∈ R C 1 ( ξ ) such that – η ↓ ∈ R C ( η t ) , – R D ( η ) = R D ( η t ) for ev ery D ∈ P + ( C 2 ) , – M ′ , u ′ ⊨ ζ p – ( η ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p . Construct a new w orld u such that q ∈ P , q ∈ V ( u ) if and only if w ( η ) ⊨ q ; add u to T ∗ C 1 . A dd ( t, u ) and ( u, u ) to R i for ev ery i ∈ C 2 . Add ( u, u ′ ) to ρ . (W e also sa y u is constructed b y u ′ , η , and ζ , lik e those constructed in Step 1.) Step 2-2 F or every B ∈ P + ( X ) , every t ∈ T ∗ B , every i ∈ P + ( B c ) , and every u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . Note that, w e need to prov e the claim that the form ulas η and ζ exist in Step 2-1. On the one hand, since M ′ , t ′ ⊨ ζ p t , by Prop osition 5.5 (the Sibling Prop erty), there is ζ ∈ R C 1 ( ξ ) such that • M ′ , u ′ ⊨ ζ p , A THE DETERRED PR OOFS 40 • ( ζ ↓ ) p ∈ R C ( ζ t ) p • R D ( ζ ) p = R D ( ζ t ) p for every D ∈ P + ( C 2 ) . Note that since t is constructed in Step 1, ( η ↑ ( k + d ) t ) p = ( ζ ↑ ( k + d ) t ) p . So, there is χ ∈ R C ( η t ) such that ( χ ↑ ( k + d − 1) ) p = (( ζ ↓ ) p ) ↑ ( k + d − 1) . Note that χ ∈ D P k + h − 1 and ζ ∈ D P k + h while k + h ≥ k + h − 1 ≥ k + d − 1 , so b y Proposition 3.14, we hav e ( χ ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p . On the other hand, b y Prop osition 5.5 (the Sibling Prop erty) again, there is η ∈ R C 1 ( γ ) such that • χ = η ↓ ∈ R C ( η t ) , • R D ( η ) = R D ( η t ) p for every D ∈ P + ( C 2 ) . So, χ ↑ ( k + d − 1) = η ↑ ( k + d − 1) . Therefore, ( η ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p . Hence, the formulas η and ζ are what Step 2-1 requires. Denote by ( M , U X ) γ ,ξ ,k,d 4 the submo del constructed via the rst four steps. Step 5 F or ev ery B ∈ P + ( X ) and every t ∈ T ∗ B , if there is i ∈ B c suc h that R ′ i ( t ′ ) = ∅ „ consider the m ulti-p oin ted submo del ( M ′ , U t ′ B c ) , where U t ′ B c = { T t ′ D | T t ′ D = R ′ D ( t ′ ) for D ∈ P + ( B c ) } . Let’s discuss the world t . – t is constructed in Step 1: Then, ( η ↑ ( k + d ) t ) p = ( ζ ↑ ( k + d ) t ) p . Since k ≤ d , then k − 1 ≤ d . By the inductive hypothesis, a m ulti-p ointed mo del ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d = ( S t , R t , V t , U t B c ) is constructed, where U t B c = { T t D | D ∈ P + ( B c ) } , such that ∗ T t D is D -equiv alent in ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d , for D ∈ P + ( B c ) ; ∗ ρ t : ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d ↔ col p ( M ′ , U t ′ B c ) ; ∗ T t D is R D ( η t ) ↑ ( k − 1) -complete, for D ∈ P + ( B c ) . – t is constructed in Step 2-1: Then, ( η ↑ ( k + d − 1) t ) p = ( ζ ↑ ( k + d − 1) t ) p . Since k ≤ d , then k − 1 ≤ d − 1 . By the inductive h yp othesis, ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) = ( S t , R t , V t , U t B c ) is constructed, where U t B c = { T t D | D ∈ P + ( B c ) } , such that ∗ T t D is D -equiv alent in ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) , for D ∈ P + ( B c ) ; ∗ ρ t : ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) ↔ col p ( M ′ , U t ′ B c ) ; ∗ T t D is R D ( η t ) ↑ ( k − 1) -complete, for D ∈ P + ( B c ) . A dd the submo del, ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d or ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) , to ( S, R , V ) , and extend ρ to b e ρ ∪ ρ t . (W e write “ ( M t , U t B c ) η t ,ζ t , ( k − 1) ,d ” or “ ( M t , U t B c ) η t ,ζ t , ( k − 1) , ( d − 1) ” as “ ( M t , U t ) ” if it is clear from con text.) Step 6 F or ev ery B ∈ P + ( X ) , ev ery t ∈ T ∗ B , ev ery i ∈ B c , let R i ( t ) 4 b e the members of R i ( t ) within ( M , U X ) γ ,ξ ,k,d 4 . F or ev ery u ∈ R i ( t ) 4 ∪ { t } such that ( M u , U u ) exists, T u i exists, whic h is an i -equiv alen t set. Then, merge all these sets T u i and R i ( t ) 4 ∪ { t } with the relation R i . A THE DETERRED PR OOFS 41 Then, together with the other steps, ( M , U X ) γ ,ξ ,k,d is constructed for the inductive step. Let ( M , U X ) = ( M , U X ) γ ,ξ ,k,d and the construction is nished. When it is clear from con text, we write “ ( M , U X ) 4 ” instead of “ ( M , U X ) γ ,ξ ,k,d 4 ” . F or in tuition, w e describ e the internal structure of ( M , U X ) in genealogical terms: Let’s also call T B the B -sons of s and s is their father , although we ha ve not yet constructed s . Let’s call T ∗ B the exact B -sons of s . Similarly , • if t is constructed in the base case , then let’s call the copies of R ′ B ( t ′ ) the B -sons of t , while t is their father . • if t is constructed in the inductiv e step , let’s sa y the members of T t B are the B -sons of t , while t is their father ; denote b y T t ∗ B the exact B -sons of t . If t wo w orlds hav e the same father, let’s call them siblings . Observ e that the mo del ( M , U X ) 4 con tains all the sons of s , and its members are all the siblings of one another. W e distinguish the B -successors of t , “ R B ( t ) ”, from the B -sons of t , “ T t B ” . It is easy to see T t B ⊆ R B ( t ) . The pro of is long, so w e deconstruct it into the following lemma: Lemma A.6 sho ws that T B is B -equiv alen t and ( M , U X ) is transitiv e and Euclidean, namely , a K45 n D -mo del. Lemma A.7 sho ws that ( M , U X ) ↔ col p ( M ′ , U ′ X ) . Now supp ose b oth γ and ξ are KD45 n D - satisable and ( M ′ , s ′ ) is serial. F or ev ery t ∈ S and every i ∈ A , b ecause R ′ i ( t ′ ) = ∅ , by the construction and the collectve p -bisimulation, we hav e R i ( t ) = ∅ . Then, ( M , U X ) is serial, namely , a KD45 n D -mo del. Lemma A.8 sho ws that T B is R B ( γ ) ↑ k -complete. Then, the Construction Lemma is pro ved. M ′ s ′ R ′ B ( s ′ ) t ′ ξ ζ t R B γ η t R B t T ∗ B M ′ , s ′ ⊨ ξ p ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p M ′ , t ′ ⊨ ζ p t ( η ↑ ( k + d ) t ) p = ( ζ ↑ ( k + d ) t ) p M Figure 4: Step 1 of Lemma 5.11 F act A.4. Consider the mo del ( M , U X ) of Lemma 5.11. Let i ∈ A and B , B 1 , B 2 ∈ P + ( A ) . 1. F or ev ery t 1 ∈ T ∗ B 1 , t 2 ∈ T ∗ B 2 , if ( t 1 , t 2 ) ∈ R i , then • i ∈ B 1 ⇐ ⇒ i ∈ B 2 ; • i ∈ B c 1 ⇐ ⇒ i ∈ B c 2 . 2. F or ev ery constructed world t and every u ∈ T t ∗ B , ( t, u ) ∈ R i ⇐ ⇒ i ∈ B . Pr o of. F or item 1, let’s discuss the relationship b et w een i and B 1 . A THE DETERRED PR OOFS 42 M ′ s ′ t ′ 1 R ′ B 1 t ′ 2 R ′ B 2 R ′ i where i ∈ B c 1 ∩ B c 2 t 1 T ∗ B 1 t 2 T ∗ B 2 R i M Figure 5: Step 2 of the base case of Lemma 5.11 t 1 T ∗ B 1 t 2 T ∗ B 2 R B 1 ∩B 2 M Figure 6: Step 3 of Lemma 5.11 M ′ s ′ t ′ R ′ B U t ′ B c ( M ′ , U t ′ B c ) M U X t T ∗ B U t B c ( M t , U t B c ) copy Figure 7: Step 5 of the base case of Lemma 5.11 M U X t 1 t 2 t 3 R TC ( t 1 , R i ∪ R − 1 i ) 4 R i R i ( M t 2 , U t 2 ) R ′ i ( t ′ 2 ) W t 2 i ( M t 1 , U t 1 ) R ′ i ( t ′ 1 ) W t 1 i ( M t 3 , U t 3 ) R ′ i ( t ′ 3 ) W t 3 i Merge Figure 8: Step 6 of the base case of Lemma 5.11 A THE DETERRED PR OOFS 43 M ′ s ′ t ′ R ′ B u ′ R ′ C 1 R ′ C 2 ξ ζ t R B ζ R C 1 ζ ↓ R C 2 γ η t R B η R C 1 η ↓ R C 2 t T ∗ B u T ∗ C 1 R C 2 M ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p M ′ , s ′ ⊨ ξ p construct where ( η ↑ ( k + d − 1) ) p = ( ζ ↑ ( k + d − 1) ) p Figure 9: Step 2-1 of the inductive step of Lemma 5.11 M ′ s ′ t ′ U t ′ ( M ′ , U t ′ ) u ′ U u ′ ( M ′ , U u ′ ) M U X u constructed in Step 2-1 U u ( M u , U u ) η u ,ζ u , ( k − 1) , ( d − 1) t constructed in Step 1 U t ( M t , U t ) η u ,ζ u , ( k − 1) ,d inductively construct Figure 10: Step 5 of the inductive step of Lemma 5.11 M U X t u 1 u 2 R i ( t ) 4 ∪ { t } ( M u 1 , U u 1 ) T u 1 i ( M t , U t ) T t i ( M u 2 , U u 2 ) T u 2 i Merge Figure 11: Step 6 of the inductive step of Lemma 5.11 A THE DETERRED PR OOFS 44 • i ∈ B 1 : ( t 1 , t 2 ) ∈ R i is added b y Step 3. So i ∈ B 1 ∩ B 2 ⊆ B 2 . • i ∈ B c : If ( t 1 , t 2 ) ∈ R i is added b y Step 2 of the Base case, w e ha ve i ∈ B c 1 ∩ B c 2 ⊆ B c 2 . If it is added b y Step 2-1 of the inductiv e step, we hav e B 2 ⊆ B 1 , so i ∈ B c 1 ⊆ B c 2 . If it is added by Step 2-2, then there is B 3 ∈ P + ( X ) and t 3 ∈ T ∗ B 3 suc h that B 1 , B 2 ⊆ B 3 , and t 1 , t 2 ∈ R i ( t 3 ) . So, i ∈ B c 3 ⊆ B c 2 . F or item 2, note that b y Step 6 of the inductiv e construction, ( t, u ) ∈ R i if and only if u ∈ T t i if and only if i ∈ B . Lemma A.5. In the construction of Lemma 5.11, ( M , U X ) 4 is transitive and Euclidean. Pr o of. Let i ∈ A and u, v , w b e any w orlds in ( M , U X ) 4 . There are B 1 , B 2 , B 3 ∈ P + ( X ) suc h that u ∈ T ∗ B 1 , v ∈ T ∗ B 2 , and w ∈ T ∗ B 3 . Let’s chec k R i is transitive in ( M , U X ) 4 . Suppose ( u, v ) ∈ R i and ( v , w ) ∈ R i . W e need to sho w that ( u, w ) ∈ R i . • i ∈ B 1 : By F act A.4, i ∈ B 2 . Similarly , i ∈ B 3 and then i ∈ B 1 ∩ B 3 . By Step 3, we hav e ( u, w ) ∈ R B 1 ∩B 3 ⊆ R i . • i ∈ B c 1 : Consider the inductive construction: – In the base case : By Step 2, ( u ′ , v ′ ) ∈ R ′ i and ( v ′ , w ′ ) ∈ R ′ i . Since ( M ′ , s ′ ) is transitive, ( u ′ , w ′ ) ∈ R i . By Step 2, w e ha ve that ( u, w ) ∈ R i . – In the inductive step : If u is constructed in Step 1, then v , w are constructed in Step 2-1 and ( v , w ) ∈ R i is added in Step 2-2, so ( u, w ) ∈ R i . If u is constructed in Step 2-1, there is t suc h that u, v , w ∈ R i ( t ) and then b y Step 2-2, we hav e ( u, w ) ∈ R i . Therefore, ( M , U X ) 4 is transitive. Let’s chec k R i is Euclidean in ( M , U X ) 4 . Supp ose ( u, v ) ∈ R i and ( u, w ) ∈ R i . W e need to show that ( v , w ) ∈ R i . • i ∈ B 1 : By F act A.4, i ∈ B 2 and i ∈ B 3 and then i ∈ B 2 ∩ B 3 . By Step 3, we hav e ( v , w ) ∈ R B 2 ∩B 3 ⊆ R i . • i ∈ B c 1 , consider the inductiv e construction: – In the base case : b y Step 2, ( u ′ , v ′ ) ∈ R ′ i and ( u ′ , w ′ ) ∈ R ′ i . Since ( M ′ , s ′ ) is Euclidean, ( v ′ , w ′ ) ∈ R i . By Step 2, w e ha ve that ( v , w ) ∈ R i . – In the inductive step : If u is constructed in Step 1, then v , w are constructed in Step 2-1, so by Step 2-2, we hav e ( v , w ) ∈ R i . If u is constructed in Step 2-1, there is t such that u, v , w ∈ R i ( t ) and then b y Step 2-2, we hav e ( v , w ) ∈ R i . Therefore, ( M , U X ) 4 is Euclidean. Lemma A.6. In the construction of Lemma 5.11, the following holds: • T B is B -equiv alent, for every B ∈ P + ( X ) . • ( M , U X ) is transitiv e and Euclidean. A THE DETERRED PR OOFS 45 Pr o of. F or ev ery B ∈ P + ( X ) , by Lemma A.5, we ha ve that T B is quasi- B -equiv alen t in ( M , U X ) 4 . Observ e that, in Steps 5 and 6, no edge of R B is added b et ween any member of T B and other worlds. By Step 3, ev ery t ∈ T B , ( t, t ) ∈ R B . Therefore, T B is B -equiv alent in the whole model ( M , U X ) . W e need to prov e R TC ( u, R i ∪ R − 1 i ) is quasi- i -equiv alen t for ev ery u ∈ S and i ∈ A . Let’s discuss the cases of u and R TC ( u, R i ∪ R − 1 i ) . • R TC ( u, R i ∪ R − 1 i ) = R TC ( u, R i ∪ R − 1 i ) 4 : – u is in some T ∗ B and i ∈ B : Observe that T ∗ B ⊆ T B ⊆ T i = R TC ( u, R i ∪ R − 1 i ) . W e hav e kno wn that T i is i -equiv alen t. – u is in some T ∗ B and i ∈ B c : Then, no i -edges or concatenated submo dels are added to any mem b er of R TC ( u, R i ∪ R − 1 i ) in Step 6. By Lemma A.5, R TC ( u, R i ∪ R − 1 i ) is quasi- i -equiv alen t. • R TC ( u, R i ∪ R − 1 i ) is only in some submo del ( M t , U t ) for t in ( M , U X ) 4 : Observe that t is not in ( M t , U t ) . No i -edges are added to any member of R TC ( u, R i ∪ R − 1 i ) in Step 6. Therefore, R TC ( u, R i ∪ R − 1 i ) is the same as that in ( M t , U t ) . Whether it is either a cop y or inductively constructed, ( M t , U t ) is transitiv e and Euclidean, so R TC ( u, R i ∪ R − 1 i ) is quasi- i -equiv alent. • Otherwise: By Lemma A.5, R TC ( u, R i ∪ R − 1 i ) 4 is quasi- i -equiv alen t. F or every t ∈ R TC ( u, R i ∪ R − 1 i ) 4 , if ( M t , U t ) exists, consider the inductive construction: – In the base case : Since ( M t , U t ) is a copy of ( M ′ , U t ′ ) which is L -mo del, then W t i is quasi- i -equiv alen t in ( M ′ , U t ′ ) . – In the Inductiv e step : By the inductiv e h yp othesis of the construction, if ( M t , U t ) constructed , then T t i is i -equiv alen t in ( M t , U t ) . Step 6 has merged all these quasi- i -equiv alent sets. By F act A.3, R TC ( u, R i ∪ R − 1 i ) is quasi- i -equiv alen t. By Prop osition 5.7, ( M , U X ) is transitiv e and Euclidean. Lemma A.7. In the construction of Lemma 5.11, ρ : ( M , U X ) ↔ col p ( M ′ , U ′ X ) Pr o of. Let’s c heck the conditions in Denition 5.10. F or t ∈ T B ∈ U X , there is a B 0 ⊇ B suc h that t ∈ T ∗ B 0 . By Step 1 and Step 2, there is t ′ ∈ R B 0 ( s ′ ) that constructs t . As B 0 ⊇ B , R B 0 ( s ′ ) ⊆ R B ( s ′ ) . So. t ′ ∈ R B ( s ′ ) and ( t, t ′ ) ∈ ρ . Con versely , for every t ′ ∈ R B ( s ′ ) , b ecause M ′ , s ′ ⊨ ξ p and ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p , there is η ∈ R B ( γ ) and ζ ∈ R B ( ξ ) such that ( η p ) ↑ ( k + d ) = ( ζ p ) ↑ ( k + d ) and M ′ , t ′ ⊨ ζ p . By Step 1, there is t constructed by t ′ , η , and ζ , and ( t, t ′ ) ∈ ρ . Let u, u ′ b e any w orlds in S and S ′ resp ectively so that ( u, u ′ ) ∈ ρ . A toms : If u is a cop y of u ′ , then V ( u ) = V ( u ′ ) . If it is constructed, observe that w ( η u ) p = w ( ζ u ) p , and M , u ⊨ w ( η u ) while M ′ , u ′ ⊨ w ( ζ u ) p . Therefore, V ( u ) ∼ p V ( u ′ ) . F orth : F or all C ∈ P + ( A ) and all v ∈ S , supp ose ( u, v ) ∈ R C . Let v ′ b e the w orld that constructs v . Then, ( v , v ′ ) ∈ ρ . W e need to show ( u ′ , v ′ ) ∈ R ′ C . Let’s discuss the cases of u, v . • u, v are in ( M , U X ) 4 : Supp ose u ∈ T ∗ B 1 and v ∈ T ∗ B 2 for some B 1 , B 2 ∈ P + ( X ) . Let’s discuss the inclusion relationship b et w een C and B 1 . A THE DETERRED PR OOFS 46 – C ⊆ B 1 : By F act A.4, C ⊆ B 2 and then C ⊆ B 1 ∩ B 2 . By the construction, u ′ ∈ R ′ B 1 ( s ′ ) and v ′ ∈ R ′ B 2 ( s ′ ) . Because M ′ is Euclidean, w e hav e ( u ′ , v ′ ) ∈ R ′ B 1 ∩B 2 ⊆ R ′ C . – C ⊆ B c 1 : If ( u, v ) is added in Step 2 of the base case, or it is added in Step 2-1 of the inductiv e step, it is easy to see that ( u ′ , v ′ ) ∈ R ′ C . Suppose ( u, v ) is added to R C in Step 2-2. Then, there is t in ( M , U X ) 4 suc h that u and v are in R C ( t ) . Then, we ha ve u ′ and v ′ are in R ′ C ( t ′ ) in M ′ . Since R ′ C is Euclidean, ( u ′ , v ′ ) ∈ R ′ C . – Otherwise: Let C 1 = C ∩ B 1 and C 2 = C ∩ B c 1 . With the help of the cases “ C ⊆ B 1 ” and “ C ⊆ B c 1 ” ab ov e, we ha v e ( u ′ , v ′ ) ∈ R ′ C 1 ∪ R ′ C 2 = R ′ C . • u, v are in the same submo del ( M t , U t ) for to some t in ( M , U X ) 4 : Consider the construction. – In the base case : ( M t , U t ) is a copy of ( M ′ , U t ′ ) . Then, u, v are copies of u ′ , v ′ resp ec- tiv ely . So, w e ha ve ( u ′ , v ′ ) ∈ R ′ C – In the inductive step : The submo del ( M t , U t ) satises that ρ t : ( M t , U t ) ↔ col p ( M ′ , U t ′ ) By the inductive hypothesis, ( u ′ , v ′ ) ∈ R ′ C and ( v , v ′ ) ∈ ρ t ⊆ ρ . • u is in ( M , U X ) 4 but v is not: – v is a C -son of u : Consider the construction. ∗ In the base case : v is a cop y of v ′ . Note that ( u, v ) ∈ R C can only b e added in Step 6, and Step 6 requires that ev ery ( v ′ , v ′ ) ∈ R ′ i for every i ∈ C . Since W u i is quasi- i -equiv alen t in ( M u , U u ) , then there is v ′ 0 ∈ R ′ C ( u ′ ) such that ( v ′ , v ′ 0 ) ∈ R ′ i . Since R ′ C is Euclidean, ( v ′ 0 , v ′ ) ∈ R ′ i . Since R ′ C is transitiv e, w e ha ve ( u ′ , v ′ ) ∈ R ′ i in ( M ′ , s ′ ) . Then, v ′ ∈ R ′ C ( u ′ ) . ∗ In the inductive step : By the inductiv e hyposis, ( v , v ′ ) ∈ ρ u ⊆ ρ and v ′ ∈ R C ( u ′ ) . – Otherwise: v is a C -son of some sibling t 1 of u . By the case “ v is a C -son of u ”, w e hav e kno wn that ( t ′ 1 , v ′ ) ∈ R ′ C . There are three p ossible cases: ∗ ( u, t 1 ) ∈ R C : Since t 1 , u are in ( M , U X ) 4 , by the case “ u, v are in ( M , U X ) 4 ”, we ha ve ( u ′ , t ′ 1 ) ∈ R ′ C . Since R ′ C is transitive, w e ha ve that ( u ′ , v ′ ) ∈ R ′ C . ∗ ( t 1 , u ) ∈ R C : Since t 1 , u are in ( M , U X ) 4 , by the case “ u, v are in ( M , U X ) 4 ”, we ha ve ( t ′ 1 , u ′ ) ∈ R ′ C . Since R ′ C is Euclidean, we hav e that ( u ′ , v ′ ) ∈ R ′ C . ∗ There is t 2 in ( M , U X ) 4 suc h that ( t 1 , t 2 ) , ( u, t 2 ) ∈ R C : Since t 1 , t 2 , and u are in ( M , U X ) 4 , b y the case “ u, v are in ( M , U X ) 4 ”, w e hav e that ( t ′ 1 , t ′ 2 ) , ( u ′ , t ′ 2 ) ∈ R ′ C . Since R ′ C is Euclidean, we ha v e that ( t ′ 2 , v ′ ) ∈ R ′ C . Since R ′ C is transitiv e, w e hav e that ( u ′ , v ′ ) ∈ R ′ C . • v is in ( M , U X ) 4 but u is not: ( u, v ) ∈ R C is added in Step 6 and ( v , v ) ∈ R C holds in ( M , U X ) 4 . Then, u is a C -son of t 3 , where either t 3 = v or t 3 is a sibling of v . By the discussion ab ov e, we ha ve that ( t ′ 3 , u ′ ) ∈ R ′ C and ( t ′ 3 , v ′ ) ∈ R ′ C . Since R ′ C is Euclidean, we hav e that ( u ′ , v ′ ) ∈ R ′ C . • u and v are in dieren t submo dels of Step 5: ( u, v ) ∈ R C is added in Step 6. There are t 4 , t 5 in ( M , U X ) 4 suc h that u is a C -son of t 4 , v is a C -son of t 5 , ( t ′ 4 , u ′ ) ∈ R ′ C , and ( t ′ 5 , v ′ ) ∈ R ′ C . There are three p ossible cases: – ( t 4 , t 5 ) ∈ R C : By the case “ u, v are in ( M , U X ) 4 ”, we ha ve ( t ′ 4 , t ′ 5 ) ∈ R ′ C . Since R ′ C is transitiv e, we ha ve that ( t ′ 4 , v ′ ) ∈ R ′ C . Since R ′ C is Euclidean, we hav e that ( u ′ , v ′ ) ∈ R ′ C . A THE DETERRED PR OOFS 47 – ( t 5 , t 4 ) ∈ R C : By the case “ u, v are in ( M , U X ) 4 ”, we ha ve ( t ′ 5 , t ′ 4 ) ∈ R ′ C . Since R ′ C is transitiv e, we ha ve that ( t ′ 5 , u ′ ) ∈ R ′ C . Since R ′ C is Euclidean, w e hav e that ( u ′ , v ′ ) ∈ R ′ C . – There is t 6 in ( M , U X ) 4 suc h that ( t 4 , t 6 ) , ( t 5 , t 6 ) ∈ R C : Since t 4 , t 5 , and t 6 are in ( M , U X ) 4 , we ha v e that ( t ′ 4 , t ′ 6 ) , ( t ′ 5 , t ′ 6 ) ∈ R ′ C . Since R ′ C is Euclidean, w e ha ve that ( t ′ 6 , u ′ ) , ( t ′ 6 , v ′ ) ∈ R ′ C and then ( u ′ , v ′ ) ∈ R ′ C . Therefore, ( u ′ , v ′ ) ∈ R ′ C and the F orth condition is pro ved. Bac k : F or all C ∈ P + ( A ) and all v ′ ∈ S ′ , supp ose ( u ′ , v ′ ) ∈ R ′ C . W e need to prov e that there is v suc h that ( u, v ) ∈ R C and ( v , v ′ ) ∈ ρ . Let’s discuss the cases of u . • u is in ( M , U X ) 4 : Let’s supp ose u ∈ T ∗ B . Let’s discuss the inclusion relationship b et ween C and B . – C ⊆ B : Since R ′ C is transitive, ( s ′ , v ′ ) ∈ R ′ C . Since ( M ′ , s ′ ) ⊨ ξ p , there is ζ ∈ R C ( ξ ) suc h that ( M ′ , t ′ ) ⊨ ζ p . Since ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p , there is η ∈ R C ( γ ) suc h that ( η ↑ ( k + d ) ) p = ( ζ ↑ ( k + d ) ) p . By Step 1, there is v ∈ T ∗ C that is constructed by v ′ and ( v , v ′ ) ∈ ρ . By Step 3, w e ha ve ( u, v ) ∈ R C . – C ⊆ B c : Since ( u ′ , v ′ ) ∈ R C , by Steps 5 and 6, there is v as a C -son of u such that ( u, v ) ∈ R C and ( v , v ′ ) ∈ ρ u ⊆ ρ . – Otherwise: Let C 1 = C ∩ B and let C 2 = C ∩ B c . Because ( s ′ , u ′ ) ∈ R ′ B and ( u ′ , v ′ ) ∈ R ′ C , w e ha ve that ( s ′ , v ′ ) ∈ R ′ C 1 . Consider the construction. ∗ In the base case : By Step 1, there is v ∈ T ∗ C that is constructed b y v ′ and ( v , v ′ ) ∈ ρ , and by Step 2, ( u, v ) ∈ R C 2 . ∗ In the inductive Step : Let’s consider the case of u · u is constructed in Step 1: v constructed in Step 2-1. Then, w e ha v e ( u, v ) ∈ R C 2 . · u is constructed in Step 2-1: There is t that is constructed in Step 1 such that u ∈ R C 2 ( t ) and ( t ′ , u ′ ) ∈ R C . Since ( u ′ , v ′ ) ∈ R ′ C and R ′ C is transitiv e, then ( t ′ , v ′ ) ∈ R C . Then, there is v ∈ T ∗ C 1 ∩ R C 2 ( t ) that is constructed in Step 2-1. By Step 2-2, w e hav e ( u, v ) ∈ R C 2 . Then by Step 3, ( u, v ) ∈ R C 1 . Therefore, ( u, v ) ∈ R C . • u is not in ( M , U X ) 4 : There is t in ( M , U X ) 4 suc h that u is in the submo del ( M t , U t ) . Consider the construction. – In the base case : u is just a cop y of u ′ . Since ( u ′ , v ′ ) ∈ R ′ C , there is a copy v of v ′ in ( M t , U t ) such that ( u, v ) ∈ R C . – In the inductive step : By the inductiv e hypothesis, ρ t : ( M t , U t ) ↔ col p ( M ′ , U t ′ ) and there is v in ( M t , U t ) such that ( u, v ) ∈ R C and ( v , v ′ ) ∈ ρ t ⊆ ρ . Therefore, there is v ∈ S such that ( u, v ) ∈ R C and ( v , v ′ ) ∈ ρ . The Bac k condition is prov ed. Hence, ρ : ( M , U X ) ↔ col p ( M ′ , U ′ X ) . Lemma A.8. If ( M , U X ) is the mo del constructed in Lemma 5.11, then for ev ery B ∈ P + ( X ) , T B is R B ( γ ) ↑ k -complete. Pr o of. Let’s discuss the cases of k . Supp ose k = 0 . By the base case of the construction, for every B ∈ P + ( A ) : A THE DETERRED PR OOFS 48 • F or ev ery t ∈ T B , t is constructed b y η t ∈ R B ( γ ) and M , t ⊨ w ( η t ) . Since η ↑ 0 t = w ( η t ) , w e ha ve M , t ⊨ η ↑ 0 t . • F or every η ∈ R B ( γ ) , since ( ξ ↑ (0+ d +1) ) p = ( γ ↑ (0+ d +1) ) p , there is ζ ∈ R B ( ξ ) such that ( ζ ↑ (0+ d ) ) p = ( η ↑ (0+ d ) ) p . By Step 1, there is t ∈ T ∗ B ⊆ T B that is constructed b y η and M , t ⊨ w ( η ) . Since η ↑ 0 = w ( η ) , we hav e M , t ⊨ η ↑ 0 . Therefore, when k = 0 , for ev ery B ∈ P + ( X ) , T B is R B ( γ ) ↑ k -complete. Supp ose k > 0 . W e will prov e the follo wing fact: F or every l ≥ 0 , every u ∈ S that is constructed but not a copy , M , u ⊨ ( η ↓ h u ) ↑ l Because γ ∈ D P k + h +1 and η u wholly o ccurs in γ , then there is m ∈ { 0 , . . . , k } suc h that η u ∈ D P m + h . Then, η ↓ h u ∈ D P m . Let’s prov e this fact b y induction on l . Base case ( l = 0 ): Similar to the case of “ k = 0 ” and regardless of the v alue of m , M , u ⊨ w ( η u ) . So, M , u ⊨ ( η ↓ h u ) ↑ 0 . Inductiv e step ( l > 0 ): If m < l , since η ↓ h u ∈ D P m , we hav e ( η ↓ h u ) ↑ l = ( η ↓ h u ) ↑ ( l − 1) = η ↓ h u b y Prop osition 3.14. Then, we hav e M , u ⊨ ( η ↓ h u ) ↑ l b y the inductive h yp othesis on l . In the follo wing, we assume m ≥ l . W e ha ve known M , u ⊨ w ( η u ) . It remains to show for an y C ∈ P + ( A ) , M , u ⊨ ∇ C R C ( η ↓ h u ) ↑ ( l − 1) . According to the inductiv e construction, let’s supp ose u is in an exact B -son of some t , namely , u ∈ T t ∗ B . (In particular, when m = k , then T t ∗ B is T ∗ B , u is in ( M , U X ) 4 , and actually , t is s .) Let’s rst pro ve “ M , u ⊨ D C R C ( η ↓ h u ) ↑ ( l − 1) ” . That is to pro v e for every v ∈ R C ( u ) , there is a form ula η v that constructs v , such that ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) and M , v ⊨ ( η ↓ h v ) ↑ ( l − 1) . Let’s discuss the inclusion relationship b etw een C and B . t t 1 u u 1 U t u 2 U t 1 R C T t ∗ B When C ⊆ B t u T t ∗ B u 0 U t v U u v 1 U u 0 R C When C ⊆ B c Figure 12: Any possible C -successor of u , when u is t ’s exact B -son. Supp ose C ⊆ B c . As illustrated in Figure 12, there are four p ossible cases: 1 v is a C -son of u : v is constructed b y some η v ∈ R C ( η u ) ⊆ D P ( m − 1)+ h . 2 v is u : ( u, u ) is added to R C in Step 2-1 of constructing ( M t , U t ) . There is a sibling u 0 of u suc h that u ∈ R C ( u 0 ) . By Step 2-1, η ↓ u ∈ R C ( η u 0 ) = R C ( η u ) . Then, η ↓ u ∈ R C ( η u ) . A THE DETERRED PR OOFS 49 3 v is some sibling of u : η v ∈ D P m + h . There are tw o p ossible cases b y Step 2: • u is constructed in Step 1 and ( u, v ) is added to R C in Step 2-1. Ob viously , η ↓ v ∈ R C ( η u ) . • there is a sibling w of u suc h that u, v ∈ R C ( w ) are added in Step 2-1, and ( u, v ) is added to R C in Step 2-2. Then, η ↓ v ∈ R C ( η w ) = R C ( η u ) . So, η ↓ v ∈ R C ( η u ) . 4 v is a C -son of some sibling u 1 of u : Similar to Case 1 , we ha v e η v ∈ R C ( η u 1 ) . By Step 2, w e ha ve R C ( η u 1 ) = R C ( η u ) . So, η v ∈ R C ( η u ) . In summary: • In Case 1 and Case 4 , η v ∈ D P ( m − 1)+ h , so ( η ↓ h v ) ∈ R C ( η ↓ h u ) and then ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . • In Case 2 and Case 3 , η v ∈ D P m + h , so η ↓ ( h +1) v ∈ R C ( η ↓ h u ) ⊆ D P m − 1 . Since m − 1 ≥ l − 1 , by Prop osition 3.14, ( η ↓ h v ) ↑ ( l − 1) = ( η ↓ ( h +1) v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . By the h yp othesis on l , M , v ⊨ ( η ↓ h v ) ↑ ( l − 1) . Supp ose C ⊆ B . As illustrated in Figure 12, there are four p ossible cases: 5 v is either u or a sibling of u : η v ∈ D P m + h and v ∈ T t C . By the construction, η v ∈ R C ( η t ) . By Prop osition 5.4 (the iden tical successors prop erty), R C ( η u ) = R C ( η ↓ t ) . So, η ↓ v ∈ R C ( η u ) . Similar to Case 3 , we ha ve ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . 6 v is t : Then, ( u, t ) ∈ R C can only added in Step 6 and ( t, t ) ∈ R C . Similar to Case 2 , η ↓ t ∈ R C ( η t ) and then, η ↓ 2 t ∈ R C ( η ↓ t ) . By Prop osition 5.4, we ha ve that R C ( η u ) = R C ( η ↓ t ) . So, η ↓ ( h +2) t ∈ R C ( η ↓ h u ) . Note that η ↓ h t ∈ D P m +1 while η ↓ ( h +2) t ∈ R C ( η ↓ h u ) ⊆ D P m − 1 , and m − 1 ≥ l − 1 ≥ 0 . By Prop osition 3.14, ( η ↓ h t ) ↑ ( l − 1) = ( η ↓ ( h +2) t ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . 7 v is some sibling of t : Similar to Case 3 , w e ha ve η ↓ v ∈ R C ( η t ) . So, η ↓ 2 t ∈ R C ( η ↓ t ) . By Propo- sition 5.4 (the iden tical successors prop erty), R C ( η u ) = R C ( η ↓ t ) . Then, η ↓ ( h +2) v ∈ R C ( η ↓ h u ) . Similar to Case 6 , ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . 8 v is a C -son of some sibling t 1 of t : Similar to Case 5 and Case 7 , w e hav e that R C ( η v ) = R C ( η u ) = R C ( η ↓ t ) = R C ( η ↓ t 1 ) . Since η v ∈ R C ( η t 1 ) , then η ↓ v = R C ( η u ) . So, ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . In summary , ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) and by the hypothesis on l , M , v ⊨ ( η ↓ h v ) ↑ ( l − 1) . Supp ose C 1 = C ∩ B = ∅ and C 2 = C ∩ B c = ∅ . There are tw o p ossible cases: 9 v is u : Combining Case 2 and Case 5 , we hav e ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . 10 v is a sibling of u : Combining Case 3 and Case 5 , w e hav e ( η ↓ h v ) ↑ ( l − 1) ∈ R C ( η ↓ h u ) ↑ ( l − 1) . A THE DETERRED PR OOFS 50 Then, by the hypothesis on l , M , v ⊨ ( η ↓ h v ) ↑ ( l − 1) . Th us, it is prov ed that M , u ⊨ D C R C ( η ↓ h u ) ↑ ( l − 1) . Con versely , we need to prov e “ M , u ⊨ ˆ D C R C ( η ↓ h u ) ↑ ( l − 1) ” . That is to prov e for every η ∈ R C ( η u ) , there is v ∈ R C ( u ) such that M , v ⊨ ( η ↓ h ) ↑ ( l − 1) . Recall that M ′ , u ′ ⊨ ζ p u and there is d 1 suc h that ( η ↑ ( m + d 1 ) u ) p = ( ζ ↑ ( m + d 1 ) u ) p . Let’s discuss the inclusion relationship b et ween C and B . • C ⊆ B c : There is ζ ∈ R C ( ζ u ) such that ( η ↑ ( m + d 1 − 1) ) p = ( ζ ↑ ( m + d 1 − 1) ) p . Since M ′ , u ′ ⊨ ζ p u , there is v ′ ∈ R ′ C ( u ′ ) such that M ′ , v ′ ⊨ ζ . By the inductive construction of ( M u , U u ) , η , ζ , and v ′ construct a world v ∈ T u ∗ C . By Step 6, ( u, v ) ∈ R C . By the hypothesis on l , M , v ⊨ ( η ↓ h ) ↑ ( l − 1) . • C ⊆ B : By Prop osition 5.4 (the iden tical successors prop erty), there is η 0 ∈ R C ( η t ) ⊆ D P m + h suc h that η ↓ 0 = η . There is ζ ∈ R C ( ζ t ) suc h that ( η ↑ ( m + d 1 ) ) p = ( ζ ↑ ( m + d 1 ) ) p . By Step 1 of constructing the mo del ( M t , U t ) , η 0 constructs some v ∈ T t ∗ C ⊆ T t C . By Step 3, ( u, v ) ∈ R C . Note that η ↓ h 0 ∈ D P m , η ↓ h ∈ D P m − 1 , and m − 1 ≥ l − 1 ≥ 0 . By Prop osition 3.14, ( η ↓ h 0 ) ↑ ( l − 1) = ( η ↓ h ) ↑ ( l − 1) . By the hypothesis on l , we ha ve M , v ⊨ ( η ↓ h 0 ) ↑ ( l − 1) . So, M , v ⊨ ( η ↓ h ) ↑ ( l − 1) . • C 1 = C ∩ B = ∅ and C 2 = C ∩ B c = ∅ : There is ζ ∈ R C ( ζ u ) suc h that ( η ↑ ( m + d 1 − 1) ) p = ( ζ ↑ ( m + d 1 − 1) ) p . Since M ′ , u ′ ⊨ ζ p u , there is v ′ ∈ R ′ C ( u ′ ) such that M ′ , v ′ ⊨ ζ . By Step 2-1, there is η 0 ∈ R C 1 ( η t ) ⊆ D P m + h suc h that η ↓ 0 = η and η 0 constructs v ∈ T t ∗ C 1 . Then, w e ha ve ( u, v ) ∈ R C . Note that η ↓ h 0 ∈ D P m , η ↓ h ∈ D P m − 1 , and m − 1 ≥ l − 1 . By Prop osition 3.14, ( η ↓ h 0 ) ↑ ( l − 1) = ( η ↓ h ) ↑ ( l − 1) . By the hypothesis on l , we hav e M , v ⊨ ( η ↓ h 0 ) ↑ ( l − 1) . So, M , v ⊨ ( η ↓ h ) ↑ ( l − 1) . Th us, it is prov ed that M , u ⊨ ˆ D C R C ( η ↓ h u ) ↑ ( l − 1) . In summary , M , u ⊨ C ∈ P + ( A ) ∇ C R C ( η ↓ h u ) ↑ ( l − 1) . Hence, the fact is prov ed: M , u ⊨ ( η ↓ h u ) ↑ l for ev ery l and every constructed u . Consider ( M , U X ) and an y B ∈ P + ( X ) : • F or ev ery t ∈ T B , t is constructed by η t ∈ R B ( γ ) . By Prop osition 3.14, ( η ↓ h t ) ↑ k = η ↓ h t = η ↑ k t . By the fact w e just prov ed, M , t ⊨ ( η ↓ h t ) ↑ k . Therefore, M , t ⊨ η ↑ k t . • F or ev ery η ∈ R B ( γ ) ⊆ D P k + h , since ( ξ ↑ ( k + d +1) ) p = ( γ ↑ ( k + d +1) ) p , there is ζ ∈ R B ( ξ ) such that ( ζ ↑ ( k + d ) ) p = ( η ↑ ( k + d ) ) p . By Step 1, there is t ∈ T ∗ B ⊆ T B constructed b y η . By the fact we just prov ed, M , t ⊨ ( η ↓ h ) ↑ k . By Prop osition 3.14, ( η ↓ h ) ↑ k = η ↓ h = η ↑ k . Therefore, M , t ⊨ η ↑ k . Hence, T B is R B ( γ ) ↑ k -complete for ev ery B ∈ P + ( X ) . Lemma 5.14 (The Construction Lemma for S5 n D ) . Let k , d, h b e natural num b ers such that 0 ≤ k ≤ d ≤ h . Let γ , ξ ∈ D P k + h +1 ( S5 n D ) such that ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p . Let ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an S5 n D -mo del of ξ p . Giv en X ∈ P + ( A ) and the m ulti-p oin ted submo del ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) A THE DETERRED PR OOFS 51 where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed S5 n D -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } such that, • T B is B -equiv alent, for every B ∈ P + ( X ) ; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( γ ) ↑ k -complete, for ev ery B ∈ P + ( X ) . Pr o of. This construction is almost the same as that of Lemma 5.11, except Step 2-2 of the inductive step: Step 2-2 F or every B ∈ P + ( X ) , every t ∈ T ∗ B , add ( t, t ) ∈ R j for every j ∈ A , and subsequen tly , for ev ery i ∈ P + ( B c ) , and ev ery u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . Ob viously , ( M , U X ) 4 is reexiv e. By Lemma A.5, ( M , U X ) 4 is transitiv e, Euclidean, and reexive. Then b y the inductive hypothesis, every concatenated submo del in Step 5 is also reexiv e. Then, w e can rep eat the discussion of Lemma A.5 by replacing “quasi- i -equiv alen t” with “ i -equiv alent” . By Prop osition 5.7, ( M , U X ) is reexive. By Lemma A.6, ( M , U X ) is also transitiv e and Euclidean. Therefore, ( M , U X ) is an S5 n D -mo del, and T B is B -equiv alent in ( M , U X ) for ev ery B ∈ P + ( X ) . The pro of of collective p -bisimulation is analogous to Lemma A.7, and we only need to add the follo wing discussion in the F orth condition: F or all C ∈ P + ( A ) and all v ∈ S , supp ose ( u, v ) ∈ R C : • v is u : Since ( M ′ , s ′ ) is reexiv e, then ( u ′ , u ′ ) ∈ R ′ C Therefore, ( M , s ) ↔ col p ( M ′ , s ′ ) . W e still need to sho w T B is R B ( γ ) ↑ k -complete. This pro of rep eats the one of Lemma A.8. W e only need to c hange the following case in that proof. 2 v is u : By Lemma 4.2, η ↓ u ∈ R C ( η u ) . T B is R B ( γ ) ↑ k -complete. The construction lemma for S5 n D is prov ed. Lemma 5.19. Let δ ∈ D P k +1 ( L 2 ) for k ≥ 0 and ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an L 2 -mo del of δ p . Giv en X ∈ P + ( A ) and ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed L 2 -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } , and ρ ⊆ S × S ′ , such that, • T B is B -equiv alent in ( M , U X ) , for ev ery B ∈ P + ( X ) ; • ρ : ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( δ ) -complete, for every B ∈ P + ( X ) . A THE DETERRED PR OOFS 52 Pr o of. Let’s slightly mo dify the construction in Lemma 5.11. Recall that the parameters d and h are needed in Lemma 5.11. Let’s x d = h = 0 . Let ξ b e any mem b er in D P k +1 ( L ) suc h that ( δ ↑ ( k +0+1) ) p = ( ξ ↑ ( k +0+1) ) p , namely δ p = ξ p . The Greek letter η ranges ov er the d-canonical form ulas that wholly o ccur in δ , while the Greek letter ζ ov er those in ξ . Base case ( k = 0 ): the construction is the same as the Base case of Lemma 5.11. Since k ≤ d = 0 , the L 2 -mo del ( M , U X ) δ,ξ, 0 , 0 is constructed. Inductiv e step ( k > 0 ): Steps 1, 3, 4, and 6 are the same as those of Lemma 5.11. W e only sho w Steps 2 and 5. Note that Lemma 5.11 required the condition “ k ≤ d ” for Steps 2 and 5, but here k > d = 0 . Step 2-1 F or ev ery B ∈ P + ( X ) , C ∈ P + ( A ) suc h that B ∩ C = ∅ and B c ∩ C = ∅ , ev ery t ∈ T ∗ B and ev ery u ′ ∈ R ′ C ( t ′ ) , since ( η ↑ k t ) p = ( ζ ↑ k t ) p , consider the follo wing: Since A = { 1 , 2 } , B is a singleton and C = A . Denote by i and j the only members of B and B c resp ectively . By Prop osition 5.18, there exists u ∈ T ∗ i that is constructed b y u ′ and η u ∈ R i ( δ ) in Step 1 suc h that – η ↓ u ∈ R C ( η t ) , – R j ( η u ) = R j ( η t ) , – M ′ , u ′ ⊨ η p u , Then add ( t, u ) , ( u, u ) to R j . (Note that this Step 2-1 do es not add an y new worlds to S .) Step 2-2 F or ev ery B ∈ P + ( X ) , every t ∈ T ∗ B , (if L 2 is S5 2 D , add ( t, t ) ∈ R j for every j ∈ A , and subsequen tly ,) for every i ∈ P + ( B c ) , and ev ery u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . Step 5 F or every B ∈ P + ( X ) where B = A , since B is a singleton, denote b y i the only mem b er of B and by j the only mem b er of B c . If R ′ j ( t ′ ) = ∅ , consider the m ulti-p oin ted submo del ( M ′ , U t ′ { j } ) where T t ′ j = R ′ j ( t ′ ) and U t ′ { j } = { T t ′ j } . By the inductiv e hypothesis, a multi-pointed L -mo del ( M t , U t { j } ) η t ,ζ t , ( k − 1) , 0 , where U t ′ { j } = { T t ′ j } , has b een constructed suc h that – T t j is j -equiv alent; – T t j is R j ( η t ) -complete; – ( M t , U t { j } ) η t ,ζ t , ( k − 1) , 0 ↔ col p ( M ′ , U t ′ { j } ) . A dd ( M t , U t B c ) η t ,ζ t , ( k − 1) , 0 to ( S, R, V ) . With the other steps, the construction is nished. Let ( M , U X ) = ( M , U X ) δ,δ ,k , 0 . Observ e that, as long as ( M , U X ) is constructed, none of Lemma A.6, Lemma A.7, and Lemma A.8 requires the condition “ k ≤ d ≤ h ” . Therefore, w e can conclude that ( M , U X ) is an L 2 -mo del such that • T B is B -equiv alent; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( δ ) -complete. A THE DETERRED PR OOFS 53 Prop osition 6.2. Consider the context of a mo dal system L . Let δ ∈ C P k ( L ) where k ∈ N . F or ev ery ϕ of L D PC suc h that dep ( ϕ ) ≤ k and P ( ϕ ) ⊆ P , either δ ⊨ ϕ or δ ⊨ ¬ ϕ . Pr o of. Let’s prov e by induction on the construction of ϕ . Similar to the pro of of Prop osition 3.8, w e only consider the case ϕ = C ψ . Note that δ is in the form δ = w ( δ ) ∧ B∈ P + ( A ) ∇ B R B ( δ ) ∧ ∇ Φ There are t wo possible cases: • There is η 0 ∈ TC ( δ ) such that η 0 ⊨ ¬ ψ : In this case, for any ( M , s ) , if M , s ⊨ δ , then by the subform ula M , s ⊨ ˆ C TC ( δ ) , there exists t 0 ∈ TC ( s ) such that M , t 0 ⊨ η 0 . By η 0 ⊨ ¬ ψ , M , t 0 ⊨ ¬ ψ . So, M , s ⊨ ˆ C ¬ ψ . Therefore, M , s ⊨ ¬ C ψ • F or an y η ∈ TC ( δ ) , η ⊨ ψ : In this case, for any ( M , s ) , if M , s ⊨ δ , then b y the subformula M , s ⊨ C TC ( δ ) , for any t ∈ TC ( s ) , there exists γ ∈ TC ( δ ) suc h that M , t ⊨ γ . As “for an y η ∈ TC ( δ ) , η ⊨ ψ ”, w e ha ve that γ ⊨ ψ . (In the sp ecial case where TC ( δ ) = ∅ , ∇ TC ( δ ) = C ⊥ . As ⊨ ⊥ → ψ , we ha ve ⊨ C ( ⊥ → ψ ) . According to Axiom K , we hav e that ⊨ C ⊥ → C ψ .) So, M , s ⊨ C ψ . Therefore, either δ ⊨ ϕ or δ ⊨ ¬ ϕ . Prop osition 6.3. Let ( M , s ) b e a p ointed mo del and k ∈ N . Then, there exists a unique δ ∈ C P k suc h that M , s ⊨ δ . Pr o of. Let’s pro ve b y induction on k , and we only need to rene the base case. Supp ose k = 0 . F or every t ∈ TC ( s ) ∪ { s } , let ζ t = p ∈ P and M,t ⊨ p p ∧ p ∈ P and M,t ⊨ p ¬ p Let w ( δ ) = ζ s and Φ = { ζ t | t ∈ TC ( s ) } Then, δ = w ( δ ) ∧ ∇ Φ . Obviously , this δ is unique w.r.t. ( M , s ) . The inductive step is the same as that of Prop osition 3.9. Hence, the proposition is prov ed. Prop osition 6.4. Consider the context of a mo dal system L . Let ϕ ∈ L D PC , k ≥ dep ( ϕ ) , and P = P ( ϕ ) . Then, there exists a unique set Φ ⊆ C P k ( L ) such that ϕ ≡ Φ . Pr o of. Since we hav e pro v ed Prop osition 6.3, this pro of is in parallel with the pro of of Prop osition 3.10. Prop osition 6.5. Let P ⊆ P b e nite and let δ ∈ C P k . Then, for any l < k and B ∈ P + ( A ) , R B ( δ ↓ l ) = R B ( δ ) ↓ l . A THE DETERRED PR OOFS 54 Pr o of. The pro of is analogous to Prop osition 3.13 b ecause pruning do es not inuence common kno wledge. Prop osition 6.6. Consider the context of a mo dal system L . F or ev ery δ ∈ C P k ( L ) and k , l ∈ N , if k ≥ l , then the following prop erties hold: 1. δ ⊨ δ ↓ l . 2. δ ↓ l ∈ C P k − l ( L ) . 3. δ ↑ l ∈ C P l ( L ) . 4. F or ev ery h ∈ N and γ ∈ C P k + h ( L ) , γ ↓ h = γ ↑ k = ( γ ↓ h ) ↑ k . 5. F or k 1 , k 2 ∈ N , if l ≤ min { k, k 1 , k 2 } , then ( δ ↑ k 1 ) ↑ l = ( δ ↑ k 2 ) ↑ l . Pr o of. The pro of is analogous to Prop osition 3.14 b ecause pruning do es not inuence common kno wledge. Prop osition 6.7. F or ev ery satisable δ ∈ C P k where k ≥ 1 and every l ≥ 1 , TC ( δ ↑ l ) = B∈ P + ( A ) η ∈ R B ( δ ) { w ( η ↑ ( l − 1) ) } ∪ TC ( η ↑ ( l − 1) ) Pr o of. By the denition, δ ↑ l = δ when l ≥ k , while if l < k , then δ ↑ l ∈ C P l and R B ( δ ↑ l ) ⊆ C P l − 1 for ev ery B ∈ P + ( A ) . Therefore, it is sucien t to only prov e TC ( δ ) = B∈ P + ( A ) η ∈ R B ( δ ) { w ( η ) } ∪ TC ( η ) . Denote the right side of the equation by Φ . Since δ is satisable, there is ( M , s ) such that M , s ⊨ δ . Observ e that TC ( s ) = B∈ P + ( A ) t ∈ R B ( s ) { t } ∪ TC ( t ) Denote the righ t side b y T . It is easy to see that TC ( s ) is TC ( δ ) -complete while T is Φ -complete. Both TC ( δ ) and Φ consist of min terms of P . Therefore, TC ( δ ) = Φ . Theorem 6.8. F or ev ery k ≥ 0 and ev ery δ ∈ C P k ( L ) , if the follo wing holds: There is l ≥ k suc h that for every γ ∈ C P l ( L ) and every L -mo del ( M ′ , s ′ ) of γ p , if γ ↑ k = δ , then there is ( M , s ) suc h that • M , s ⊨ δ , • ( M , s ) ↔ col p ( M ′ , s ′ ) . Then, d f org et L ( δ, p ) ≡ L { γ ∈ C P l ( L ) | γ ↑ k = δ } p . Pr o of. This proof is analogous to that of Theorem 3.18. Lemma 6.10. Let δ ∈ C P k ( T n DPC ) for k ≥ 1 . Let l ∈ { 1 , . . . , k } . Then, for all B ∈ P + ( A ) , w e ha ve • δ ↓ l ∈ R B ( δ ↓ ( l − 1) ) , A THE DETERRED PR OOFS 55 • δ ↑ ( l − 1) ∈ R B ( δ ↓ l ) , • w ( δ ) ∈ TC ( δ ) . Pr o of. The pro of is in parallel with that of Lemma 4.2. W e only need to show that w ( δ ) ∈ TC ( δ ) . Let M , s b e an y T n DPC -mo del of δ . Since it is reexiv e, s ∈ TC ( s ) . Since M , s ⊨ ∇ TC ( s ) , there is a min term ζ in TC ( δ ) such that M , s ⊨ ζ . This ζ is exactly w ( δ ) . Lemma 6.11 (Lemma for T n DPC ) . Let δ ∈ C P k ( T n DPC ) . F or any T n DPC -mo del ( M ′ , s ′ ) , if M ′ , s ′ ⊨ δ p , then there is a T n DPC -mo del ( M , s ) suc h that M , s ⊨ δ and ( M , s ) ↔ col p ( M ′ , s ′ ) . Pr o of. The pro of is similar to that of Lemma 4.3. By Lemma 6.9, there is a mo del ( M ∗ , s ∗ ) suc h that M ∗ , s ∗ ⊨ δ and ( M ∗ , s ∗ ) ↔ col p ( M ′ , s ′ ) . W e construct ( M , s ) by adding edges R i to every world of ( M ∗ , s ∗ ) as we did in Lemma 4.3. It is easy to see that ( M , s ) ↔ col p ( M ′ , s ′ ) . W e still need to sho w that M , s ⊨ δ . Let’s prov e for every t in ( M , s ) , if t is constructed b y some dp c-canonical form ula η t , then M , t ⊨ η ↑ l t for every l ≥ 0 . • When l = 0 , η ↑ 0 t = w ( η t ) ∧ ∇ TC ( η t ) . W e hav e known M ∗ , t ∗ ⊨ w ( η t ) ∧ ∇ TC ( η t ) . By Lemma 6.10, w ( η t ) ∈ TC ( δ ) . So, M , t ⊨ w ( η t ) ∧ ∇ TC ( η t ) . • Supp ose l ≥ 0 . W e hav e kno wn that M , t ⊨ w ( η t ) ∧ ∇ TC ( η t ) . F or every u ∈ R B ( t ) , if u = t , b y the hypothesis, M , u ⊨ η ↑ ( l − 1) u ; if u = t , by Lemma 6.10, η ↑ ( l − 1) t ∈ R B ( η ↑ l t ) and by the h yp othesis, M , t ⊨ η ↑ ( l − 1) t . Con versely , for every η ∈ R B ( η t ) , there is a constructed u ∈ R B ( t ) suc h that M , u ⊨ η ↑ ( l − 1) u b y the hypothesis. Therefore, M , t ⊨ η ↑ l t Therefore M , s ⊨ δ . Hence, the lemma is prov ed. Lemma 6.16 (The Construction Lemma for S5 n DPC ) . Let k , d, h b e natural n umbers suc h that 0 ≤ k ≤ d ≤ h . Let γ , ξ ∈ C P k + h +1 ( S5 n DPC ) such that ( γ ↑ ( k + d +1) ) p = ( ξ ↑ ( k + d +1) ) p . Let ( M ′ , s ′ ) = ( S ′ , R ′ , V ′ , s ′ ) b e an S5 n DPC -mo del of ξ p . Giv en X ∈ P + ( A ) and the m ulti-p oin ted submo del ( M ′ , U ′ X ) = ( S ′ , R ′ , V ′ , U ′ X ) where U ′ X = { T ′ B | T ′ B = R ′ B ( s ′ ) for B ∈ P + ( X ) } , there is a multi-pointed S5 n DPC -mo del ( M , U X ) = ( S, R, V , U X ) where U X = { T B ⊆ S | B ∈ P + ( X ) } such that, • T B is B -equiv alent in ( M , U X ) , for ev ery B ∈ P + ( X ) ; • ( M , U X ) ↔ col p ( M ′ , U ′ X ) ; • T B is R B ( γ ) ↑ k -complete, for ev ery B ∈ P + ( X ) . Pr o of. This construction inherits the steps of Lemma 5.11, and w e only need to mo dify the follo wing steps: Base case : A THE DETERRED PR OOFS 56 Step 5 F or ev ery B ∈ P + ( X ) such that B = A and ev ery t ∈ T ∗ B , consider the m ulti-p ointed submo del ( M ′ , U t ′ B c ) , where U t ′ B c = { R ′ D ( t ′ ) | D ∈ P + ( B c ) } . Construct ( M t , U t B c ) as follows: Initially , let S t , V t , ρ t , and ev ery edge b e empty . – F or ev ery u ′ ∈ TC ( t ′ ) and ev ery minterm χ ∈ TC ( η t ) , if M ′ , u ′ ⊨ χ p , then construct u in S such that for ev ery q ∈ P , q ∈ V ( u ) if and only if χ ⊨ q . Let ( u, u ′ ) ∈ ρ t . – F or ev ery C ∈ P + ( A ) and ev ery u, v in S t , if ( u ′ , v ′ ) ∈ R ′ C , add ( u, v ) to R i for i ∈ C . – F or ev ery D ∈ P + ( B c ) , let U t ∗ D = { u | ( u, u ′ ) ∈ ρ t and u ′ ∈ R D ( t ′ ) } and U t D = D⊆D 0 U t ∗ D 0 Let U t B c = { U t D | D ∈ P + ( B c ) } . – F or all the w orlds u ′ in ( M ′ , s ′ ) that are unreachable from t ′ , add the induced submo del ( M ′ , u ′ ) to S t as copies, and this submo del inherits their relations and v aluation in M ′ and ( v , v ′ ) ∈ ρ t for every v ′ and its copy v in the copied submo del. F or con venience, let’s still call all the worlds in ( M t , U t B c ) the c opies of their coun terparts in M ′ , and call ( M t , U t B c ) a copy of ( M ′ , U t ′ B c ) . Observ e that ( M t , U t B c ) is still an S5 n DPC -mo del and ev ery set U t D is D -equiv alen t. Recall that we denote the set R TC ( t, R i ∪ R − 1 i ) within ( M , U X ) γ ,ξ , 0 , 0 4 b y R TC ( t, R i ∪ R − 1 i ) 4 . Step 6 F or ev ery B ∈ P + ( X ) , ev ery t ∈ T ∗ B , ev ery i ∈ B c , ev ery u ∈ R TC ( t, R i ∪ R − 1 i ) 4 , U u i in ( M u , U u ) is an i -equiv alen t set. Then, merge all these sets U u i and R TC ( t, R i ∪ R − 1 i ) 4 . Inductiv e step : Step 2-2 F or every B ∈ P + ( X ) , ev ery t ∈ T ∗ B , add ( t, t ) ∈ R j for every j ∈ A , and subsequen tly , for ev ery i ∈ P + ( B c ) , and ev ery u 1 , u 2 ∈ R i ( t ) , then add ( u 1 , u 2 ) to R i . Th us, the mo del ( M , U X ) is constructed. Observ e Step 5 of the base case and w e hav e that for ev ery B = A , every t ∈ T ∗ B , and every u ′ in ( M ′ , U t ′ B c ) , • if it is unreachable from t ′ , then there is a copy u ∈ S t suc h that ( u, u ′ ) ∈ ρ t ; • if u ′ ∈ TC ( t ′ ) , since M ′ , t ′ ⊨ ζ p t and TC ( η t ) p = TC ( ζ t ) p , there is a minterm χ ∈ TC ( η t ) that constructs a u in ( M t , U t B c ) such that M , u ⊨ χ and ( u, u ′ ) ∈ ρ t . Then, it is easy to see that ρ t : ( M t , U t B c ) ↔ col p ( M ′ , U t ′ B c ) . Then, repeating the pro of of Lemma A.7, w e conclude that ( M , U X ) ↔ col p ( M ′ , U ′ X ) . Note that Steps 1 and 3 are the same as Lemma 5.11, so T B is B -equiv alen t in ( M , U X ) for ev ery B ∈ P + ( X ) . If ( M ′ , s ′ ) is transitive, Euclidean, and reexive resp ectiv ely , ( M t , U t B c ) is also transitiv e, Eu- clidean, and reexiv e resp ectively . Then, rep eating the proofs of Lemma A.6, w e ha ve that ( M , U X ) is an S5 n DPC -mo del. It remains to prov e that T B is R B ( δ ) ↑ k -complete. The pro of is also analogous to that of Lemma A.8 and Lemma 5.14. It is augmen ted b y pro ving the fact that for every constructed w orld u , M , u ⊨ ∇ TC ( η u ) . Let’s rst pro v e M , u ⊨ ˆ C TC ( η u ) . That is to prov e for every mintern χ ∈ TC ( η u ) , there is v such that M , v ⊨ χ . Suppose η u ∈ D P m + h for m ∈ { 0 , . . . , k } . Let’s prov e by induction on m REFERENCES 57 • Base case ( m = 0 ): Supp ose u is an exact B -son of some t . – B = A : By Step 5 of the base case of constructing ( M t , U t ) , the submodel ( M u , U u ) exists and for ev ery min tern χ ∈ TC ( η u ) , there is v in ( M u , U u ) such that M , v ⊨ χ . – B = A : F or ev ery i ∈ A , η u ∈ R i ( η t ) and there is u 0 in T t ∗ i that is also constructed b y η u . Observ e that TC ( u ) = TC ( u 0 ) . Similar to the case ab o ve, there is v in ( M u 0 , U u 0 ) suc h that M , v ⊨ χ . • Inductive step ( m > 0 ): Similar to the base case, w e assume u is an exact B -son of some t but B = A , and by Step 5, ( M u , U u ) exists. F or ev ery mintern χ ∈ TC ( η u ) , – χ is w ( η ) for some successor η of η u : By the inductive construction, there is v constructed b y η as a son of u in ( M u , U u ) , such that M , v ⊨ w ( η ) . Note that v ∈ TC ( u ) . – χ ∈ TC ( η ) for some successor η of η u : Note that η ∈ D P ( m − 1)+ h . By the inductiv e construction, there is w constructed b y η as a son of u in the submo del ( M w , U w ) . By the inductiv e hypothesis on m , there is v in ( M w , U w ) suc h that M , v ⊨ χ . Note that v ∈ TC ( w ) ⊆ TC ( u ) . Therefore, for ev ery mintern χ ∈ TC ( η u ) , there is v ∈ TC ( u ) suc h that M , v ⊨ χ . W e still need to prov e M , u ⊨ C TC ( η u ) ., that is, for every v ∈ TC ( u ) , there is a mintern χ ∈ TC ( η u ) such that M , v ⊨ χ . Let’s discuss v . • v is constructed: Since every constructed world is actually constructed b y a dp c-canonical form ula that wholly o ccurs in γ , then by Prop osition 6.13, TC ( γ ) = TC ( η u ) = TC ( η v ) . Observ e that by Proposition 6.7, w ( η v ) ∈ TC ( γ ) . So, w ( η v ) ∈ TC ( η u ) and M , v ⊨ w ( η v ) . • v is a copy: There is a constructed world w such that η w ∈ D P 0+ h and v is in the submo del ( M w , U w ) . By Step 5 of the base case, v ∈ TC ( w ) and there is χ ∈ TC ( η w ) such that M , v ⊨ χ . Since every constructed w orld is actually constructed b y a dp c-canonical form ula that wholly o ccurs in γ , then b y Prop osition 6.13, χ ∈ TC ( η w ) = TC ( γ ) = TC ( η u ) . Therefore, for ev ery v ∈ TC ( u ) , there is a mintern χ ∈ TC ( η u ) such that M , v ⊨ χ . Therefore, for every constructed world u , M , u ⊨ ∇ TC ( η u ) . Th us, T B is R B ( δ ) ↑ k -complete. Hence, the Construction Lemma for S5 n DPC is prov ed. References [ÅA G22] Thomas Ågotnes, Natasha Alechina, and Rustam Galimullin. Logics with group an- nouncemen ts and distributed knowledge: completeness and expressive p ow er. Journal of L o gic, L anguage and Information , 31(2):141–166, 2022. [AIJ22] Amirhossein {Akbar T abatabai}, Rosalie Iemho, and Raheleh {Jalali Keshav arz}. Uniform Lyndon in terp olation for in tuitionistic monotone mo dal logic. In A dvanc es in Mo dal L o gic , v olume 14, pages 77–96. College Publications, 2022. [A TIJ24] Amirhossein Akbar T abatabai, Rosalie Iemho, and Raheleh Jalali. Uniform Lyndon in terp olation for basic non-normal mo dal and conditional logics. Journal of L o gic and Computation , 35(6):exae057, 11 2024. REFERENCES 58 [Å W17] Thomas Ågotnes and Yì N. W áng. Resolving distributed knowledge. A rticial Intel li- genc e , 252:1–21, 2017. [Bí07] Marta Bílk ov á. Uniform interpolation and prop ositional quantiers in mo dal logics. Studia L o gic a: A n International Journal for Symb olic L o gic , 85(1):1–31, 2007. [CvDR V23] Armando Castañeda, Hans v an Ditmarsc h, David A. Rosenblueth, and Diego A. V elázquez. Communication pattern logic: epistemic and top ological views. Journal of Philosophic al L o gic , 52(5):1445–1473, 2023. [DH00] Gio v anna D’agostino and Marco Hollenberg. Logical questions concerning the µ - calculus: In terp olation, Lyndon and łoś-T arski. The Journal of Symb olic L o gic , 65(1):310–332, 2000. [DL06] Gio v anna D’Agostino and Giacomo Lenzi. On mo dal µ -calculus with explicit inter- p olants. Journal of A pplie d L o gic , 4(3):256–278, 2006. [EKI19] Thomas Eiter and Gabriele Kern-Isb erner. A brief surv ey on forgetting from a knowl- edge represen tation and reasoning p ersp ective. KI-K ünstliche Intel ligenz , 33(1):9–33, 2019. [F GGS24] Hugo F érée, Iris v an der Giessen, Sam v an Go ol, and Ian Shillito. Mechanised uniform in terp olation formodal logics K, GL, andiSL. In Christoph Benzmüller, Marijn J.H. Heule, and Renate A. Sc hmidt, editors, Pr o c e e dings of the 13th International Joint Confer enc e on A utomate d R e asoning (IJCAR 2024) , pages 43–60. Springer, 2024. [FHMV95] Ronald F agin, Joseph Y. Halpern, Y oram Moses, and Moshe Y. V ardi. R e asoning ab out know le dge . The MIT Press, 1995. [FLvD19] Liangda F ang, Y ongmei Liu, and Hans v an Ditmarsc h. F orgetting in multi-agen t mo dal logics. A rticial Intel ligenc e , 266:51–80, 2019. [FW Q + 23] Reny an F eng, Yisong W ang, Ren Qian, Lei Y ang, and Panfeng Chen. Kno wledge for- getting in prop ositional µ -calculus. A nnals of Mathematics and A rticial Intel ligenc e , 91(1):1–43, 2023. [Ghi95] Silvio Ghilardi. An algebraic theory of normal forms. A nnals of Pur e and A pplie d L o gic , 71(3):189–245, 1995. [GKLR23] Éric Goubault, Roman Kniazev, Jérém y Leden t, and Sergio Ra jsbaum. Semi-simplicial set mo dels for distributed kno wledge. In Pr o c e e dings of the 38th A nnual A CM/IEEE Symp osium on L o gic in Computer Scienc e (LICS 2023) , pages 1–13, 2023. [GZ95] Silvio Ghilardi and Marek Zaw ado wski. Undenabilit y of prop ositional quantiers in the mo dal system S4. Studia L o gic a , 55:259–271, 1995. [Hen63] Leon Henkin. An extension of the Craig-Lyndon interpolation theorem. Journal of Symb olic L o gic , 28(3):201–216, 1963. [HM90] Joseph Y. Halp ern and Y oram Moses. Kno wledge and common knowledge in a dis- tributed environmen t. Journal of the A CM , 37(3):549–587, 1990. REFERENCES 59 [HO03] Joseph Y. Halp ern and Kevin R. O’Neill. Anonymit y and information hiding in m ulti- agen t systems. In Pr o c e e dings of the 16th IEEE Computer Se curity F oundations W ork- shop (CSF 2003) , pages 75–88. IEEE, 2003. [Iem19] Rosalie Iemho. Uniform in terp olation and the existence of sequent calculi. A nnals of Pur e and A pplie d L o gic , 170(11):102711, 2019. [JW95] Da vid Janin and Igor W alukiewicz. A utomata for the mo dal µ -calculus and related results. In Jiří Wiedermann and Petr Há jek, editors, Mathematic al F oundations of Computer Scienc e 1995 (MF CS 1995) , pages 552–562. Springer, 1995. [KS15] P atrick Koopmann and Renate Schmidt. Uniform in terp olation and forgetting for ALC on tologies with ABo xes. In Pr o c e e dings of the 29th AAAI Confer enc e on A rticial Intel ligenc e (AAAI 2015) , volume 29. AAAI Press, 2015. [LQR17] Alessio Lomuscio, Hongyang Qu, and F ranco Raimondi. MCMAS: an op en-source mo del chec ker for the v erication of multi-agen t systems. International Journal on Softwar e T o ols for T e chnolo gy T r ansfer , 19(1):9–30, 2017. [L W11] Y ongmei Liu and Ximing W en. On the progression of kno wledge in the situation calcu- lus. In Pr o c e e dings of the Twenty-Se c ond International Joint Confer enc e on A rticial Intel ligenc e (IJCAI 2011) , page 976–982. AAAI Press, 2011. [Mos07] Lawrence S. Moss. Finite mo dels constructed from canonical formulas. Journal of Philosophic al L o gic , 36(6):605–640, 2007. [MS20] R yo Murai and Katsuhik o Sano. Craig interpolation of epistemic logics with distributed kno wledge. In Andreas Herzig and Juha K on tinen, editors, F oundations of Information and K now le dge Systems (F oIKS 2020) , pages 211–221. Springer In ternational Publish- ing, 2020. [MS22] R yo Murai and Katsuhik o Sano. In tuitionistic epistemic logic with distributed knowl- edge. Computación y Sistemas (CyS) , 26(2):823–834, 2022. [P at13] Dirk Pattinson. The logic of exact co vers: completeness and uniform interpolation. In Pr o c e e dings of the 28th A nnual A CM/IEEE Symp osium on L o gic in Computer Scienc e (LICS 2013) , pages 418–427. IEEE Computer Society , 2013. [Pit92] Andrew M. Pitts. On an interpretation of second order quan tication in rst order in tuitionistic prop ositional logic. Journal of Symb olic L o gic , 57(1):33–52, 1992. [QLF + 24] Junming Qiu, W enqing Li, Liangda F ang, Quanlong Guan, Zhanhao Xiao, Zhao-Rong Lai, and Qian Dong. On the role of logical separability in kno wledge compilation. A rticial Intel ligenc e , 328:104077, 2024. [Ro e07] Floris Ro elofsen. Distributed knowledge. Journal of A pplie d Non-Classic al L o gics , 17(2):255–273, 2007. [Sha93] Vladimir Y u Sha vruko v. Sub algebr as of diagonalizable algebr as of the ories c ontaining arithmetic . P olska Akademia Nauk, Instytut Matemat yczny W arsaw, 1993. REFERENCES 60 [SMS21] Y ouan Su, R yo Murai, and Katsuhik o Sano. On artemo v and protop op escu’s in tu- itionistic epistemic logic expanded with distributed kno wledge. In Sujata Ghosh and Thomas Icard, editors, L o gic, R ationality, and Inter action (LORI 2021) , pages 216– 231. Springer, 2021. [SSP17] F atemeh Seifan, Lutz Schröder, and Dirk P attinson. Uniform in terp olation in coal- gebraic mo dal logic. In Filipp o Bonchi and Barbara König, editors, 7th Confer enc e on A lgebr a and Co algebr a in Computer Scienc e (CALCO 2017) , volume 72 of L eibniz International Pr o c e e dings in Informatics (LIPIcs) , pages 21:1–21:16. Schloss Dagstuhl – Leibniz-Zentrum für Informatik, 2017. [Stu09] Thomas Studer. Common knowledge do es not hav e the b eth prop ert y . Information Pr o c essing L etters , 109(12):611–614, 2009. [vdGJK23] Iris v an der Giessen, Raheleh Jalali, and Roman Kuznets. Extensions ofK5: pro of the- ory anduniform Lyndon in terp olation. In Rev an tha Ramanay ak e and Josef Urban, ed- itors, A utomate d R e asoning with A nalytic T able aux and R elate d Metho ds (T ABLEA UX 2023) , pages 263–282. Springer, 2023. [vdGJK24] Iris v an der Giessen, Raheleh Jalali, and Roman Kuznets. Uniform interpolation via nested sequents and h yp ersequen ts. Journal of L o gic and Computation , 35(6):exae053, 12 2024. [vDGLR22] Hans v an Ditmarsc h, Éric Goubault, Jérém y Leden t, and Sergio Rajsbaum. Kno wledge and simplicial complexes. In Björn Lundgren and Nancy Abigail Nuñez Hernández, editors, Philosophy of Computing , v olume 143 of Philosophic al Studies Series (PSSP) , pages 1–50. Springer, 2022. [Vis96] Alb ert Visser. Uniform interpolation and la yered bisimulation. In L o gic al founda- tions of mathematics, c omputer scienc e and physics—K urt Gö del’s le gacy (Gö del ’96) , v olume 6, pages 139–164, 1996. [W Å11] Yì N. W áng and Thomas Ågotnes. Public announcement logic with distributed kno wl- edge. In Hans v an Ditmarsch, Jérôme Lang, and Shier Ju, editors, L o gic, R ationality, and Inter action (LORI 2011) , pages 328–341. Springer, 2011. [W ol98] F rank W olter. F usions of modal logics revisited. In Marcus Krac ht, Maarten de Rijk e, Heinric h W ansing, and Mic hael Zakhary aschev, editors, A dvanc es in Mo dal L o gic ’96 , v olume 1, pages 361–379. CSLI Publications, 1998.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment