Determining the normal subgroups of the automorphism groups of some ultrahomogeneous structures via stabilisers
We show the simplicity of the automorphism groups of the generic $n$-hypertournament and the semigeneric tournament, and determine the normal subgroups of the automorphism groups of several other ultrahomogeneous oriented graphs. We also give a new p…
Authors: Thomas Bernert, Rob Sullivan, Jeroen Winkel
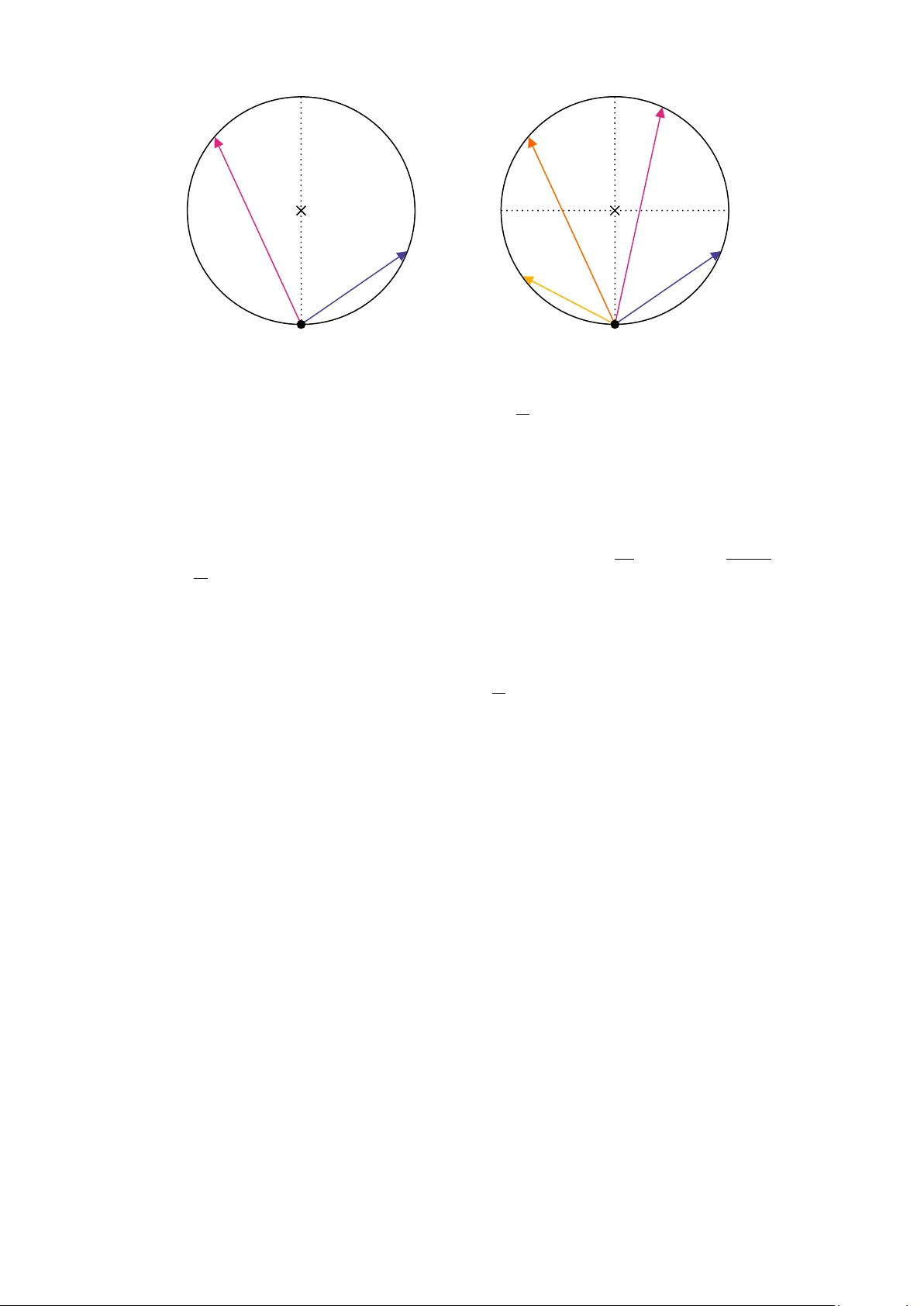
DETERMINING THE NORMAL SUBGR OUPS OF THE A UTOMORPHISM GR OUPS OF SOME UL TRAHOMOGENEOUS STR UCTURES VIA ST ABILISERS THOMAS BERNER T, ROB SULLIV A N, JEROEN WINKEL, AND SHUJIE Y ANG Abstract. W e show the simplicity of the automorphism groups of the generic n -hypertournament and the semigeneric tournamen t, and determine the normal subgroups of the automorphism groups of several other ultrahomogeneous oriented graphs. W e also giv e a new pro of of the simplicity of the automorphism group of the dense 2 π n -local order S ( n ) for n ≥ 2 (a result due to Droste, Giraudet and Macpherson). Previous tec hniques of Li, Macpherson, T ent and Ziegler in v olving stationary weak indep endence relations (SWIRs) cannot be applied directly to these structures; our approach inv olv es applying these tec hniques to a certain expansion of each structure, where the expansion has a SWIR and its automorphism group is isomorphic to a stabiliser subgroup of the automorphism group of the original structure. 1. Introduction Recall that a first-order structure M is ultr ahomo gene ous if ev ery isomorphism b etw een finitely generated sub- structures extends to an automorphism of M . W e call a coun tably infinite ultrahomogeneous structure a F r a ¨ ıss ´ e structur e , and we assume the reader is familiar with the basic theory of these – see [ Ho d93 ], [ Mac11 ] for more bac kground. In this pap er, we determine the normal subgroups of the automorphism groups of certain F ra ¨ ıss´ e structures: the generic n -hypertournament, the semigeneric tournament and several other ultrahomogeneous orien ted graphs from Cherlin’s list ([ Che98 ]). W e also give a new pro of that the automorphism group of the dense 2 π n -lo cal order is simple; this is a result due to Droste, Giraudet and Macpherson. W e use a new v ariation on existing techniques of Li, Macpherson, T ent and Ziegler, as explained b elow. 1.1. Bac kground. Classical results. There is a long history of results determining the normal subgroups of automorphism groups of F ra ¨ ıss´ e structures. Some of the main structures considered are as follows: • a countably infinite pure set: the non-trivial prop er normal subgroups of the symmetric group Sym ω are the group of finite-supp ort permutations and its subgroup of even p ermutations ([ Ono29 ], [ SU33 ], [ Bae34 ]); • ( Q , < ), the dense linear order without endp oints ([ Hig54 ], [ Llo64 ] – see also [ Gla82 ]): the non-trivial prop er normal subgroups of Aut( Q , < ) consist of: the subgroup of left-b ounded automorphisms L = { g ∈ Aut( Q , < ) | ∃ a ∈ Q , g | ( −∞ ,a ) = id } , the subgroup of righ t-b ounded automorphisms R = { g ∈ Aut( Q , < ) | ∃ a ∈ Q , g | ( a, ∞ ) = id } , the subgroup of b ounded automorphisms B = L ∩ R ; • the ω -dimensional vector space V ω o ver a finite field K : see [ Ros58 ] for the normal subgroups of GL( V ω , K ); • the Rado graph: its automorphism group is simple ([ T ru85 ]); • the generic K n -free graph, the random tournament: their automorphism groups are simple ([ Rub88 ]). • 2-homogeneous trees: the automorphism group of each coun tably infinite 2-homogeneous tree has 2 2 ℵ 0 normal subgroups which are pairwise ⊆ -incomparable ([ DHM89 ]); • the generic p oset: its automorphism group is simple ([ GMR93 ]). Date : 31st March 2026. 2020 Mathematics Subje ct Classific ation. 03C15, 20B27, 20E32, 03C45. Key words and phr ases. automorphism group, simple, indep endence relation, hypertournament, semigeneric tournamen t. Thomas Bernert is funded by EPSRC Studentship 2712596. Rob Sulliv an is funded by Pro ject 24-12591M of the Czech Science F oundation (GA ˇ CR). Sh ujie Y ang is funded by the Deutsc he F orsch ungsgemeinschaft (DF G, German Researc h F oundation) under Germany’s Excellence Strategy EXC 2044–390685587, Mathematics M ¨ unster: Dynamics–Geometry–Structure; b y CR C 1442 Geometry: Deformations and Rigidit y; and by the China Scholarship Council (CSC) 202204910109. 1 Mo dern techniques using stationary indep endence relations (SIRs). The most recent tec hniques used to determine the normal subgroups of automorphism groups of F ra ¨ ıss´ e structures are descended from an approac h of Lascar from the early nineteen-nineties via descriptive set theory . Lascar used this to show the simplicit y of Aut( C / Q alg ) – see [ Las92 ], [ Las97 ]. This approac h w as adapted b y Macpherson and T ent in [ MT11 ] to show that the automorphism group of any transitive F ra ¨ ıss ´ e structure with free amalgamation is simple (assuming the structure is not an indiscernible set), as are the automorphism groups of the random tournamen t and the generic n -anticlique-free oriented graph. The techniques of Macpherson and T ent were then further extended b y T en t and Ziegler in [ TZ13b ], [ TZ13a ] to sho w the (abstract) simplicit y of the quotien t of the isometry group of the complete Urysohn space by the normal subgroup of b ounded-displacement isometries, as well as the simplicit y of the isometry group of the b ounded complete Urysohn space. F urther results using the metho ds of [ TZ13b ] can b e found in [ GT14 ], [ EGT16 ], [ EHK + 21 ], [ Y am23 ]. One component of the T ent-Ziegler approach is the axiomatisation of a certain independence relation inspired by forking indep endence for stable theories, called a stationary indep endenc e r elation (SIR) : this is a ternary relation | on the set of finitely generated substructures of a F ra ¨ ıss ´ e structure M , written B | A C for A, B , C ⊆ f . g . M , capturing the follo wing notion: B | A C holds exactly when the substructures B ∪ A and C ∪ A are c anonic al ly amalgamate d ov er A . Here, the canonical amalgam is required to be symmetric: we hav e B | A C ⇔ C | A B . See Theorem 2.2 and Theorem 2.3 for the formal description. F or example, in the Rado graph the canonical amalgam is the free amalgam: we define that B | A C holds when there is no edge b et w een B \ A and C \ A . In the rational Urysohn space U Q (the F ra ¨ ıss´ e limit of the class of all finite metric spaces with rational distances), the canonical amalgam is that which has the maximum p ossible distances while still satisfying the triangle inequality: for A, B , C ⊆ fin U Q with A = ∅ , we define B | A C if, for b ∈ B \ A , c ∈ C \ A , w e ha ve d ( b, c ) = min a ∈ A ( d ( b, a ) + d ( c, a )). Note an imp ortant distinction b et ween these tw o examples which will b e particularly relev an t in the current pap er: for the Rado graph, the indep endence relation | w as defined o ver the empty set, but for the rational Urysohn space w e only defined | o ver non-empty bases A . In the case where | is defined for non-empty base substructures A , we call | a lo c al SIR. The second main comp onent of the T ent-Ziegler approac h is the notion of an automorphism which mov es maximally . Let M b e a F ra ¨ ıss ´ e structure with a (lo cal) SIR. An automorphism g ∈ Aut( M ) moves maximal ly if, for every type p ( ¯ x/ A ) ov er a finitely generated substructure A ⊆ f . g . M which is realisable in M , there is a realisation ¯ b | = p in M with ¯ b | A g ( A ) g ( ¯ b ) and ¯ bA | g ( A ) g ( ¯ b ). (Here, we use the follo wing notation: we write U V to mean the substructure generated by U ∪ V .) The main result of [ TZ13b ] is as follo ws: F act 1.1 ([ TZ13b , Theorem 2.7, Lemma 2.8] – rephrased) . L et M b e a F r a ¨ ıss´ e structur e satisfying one of the fol lowing two c onditions: (i) M has a SIR; (ii) M has a lo c al SIR and Aut( M ) has a dense c onjugacy class. Supp ose g ∈ Aut( M ) moves maximal ly. Then e ach element of Aut( M ) is a pr o duct of ≤ 8 c onjugates of g . By the ab ov e result, giv en such a structure M , in order to show that Aut( M ) is simple it suffices to sho w that an y non-trivial normal subgroup contains an automorphism which mov es maximally . This is in general not immediate, and one usually pro duces such automorphisms via a bac k-and-forth construction, requiring some effort. How ever, if the SIR satisfies an additional axiom (see Theorem 3.2 ) that w e call fr e eness (following [ Con17 ]), then one do es not need to pro duce maximally-moving automorphisms by hand: F act 1.2 ([ TZ13b , Lemma 5.1]) . L et M b e a F r a ¨ ıss ´ e structur e with a fr e e SIR. L et g ∈ Aut( M ) . Supp ose that g satisfies the fol lowing c ondition: for e ach 1 -typ e p ( x/ A ) over A ⊆ f . g . M with infinitely many r e alisations in M , some r e alisation of p ( x/ A ) is not fixe d by g . Then ther e exists h ∈ Aut( M ) such that the c ommutator [ g , h ] moves maximal ly. An y F ra ¨ ıss´ e structure M with free amalgamation has a free SIR, and if Aut( M ) is transitive and M is not an indiscernible set then all non-trivial g ∈ Aut( M ) satisfy the ab ov e condition (see [ TZ13b , Section 5], [ MT11 , Corollary 2.10]). So w e hav e: F act 1.3 ([ TZ13b , Corollary 5.2]) . L et M b e a F r a ¨ ıss´ e structur e with fr e e amalgamation which is not an indisc ernible set, and supp ose that Aut( M ) is tr ansitive. Then, for al l g ∈ Aut( M ) \ { id } , e ach element of Aut( M ) is a pr o duct of ≤ 16 c onjugates of g and g − 1 , and thus Aut( M ) is simple. The recent generalisation of Li. In [ Li19 ] and her PhD thesis [ Li21 ], Yib ei Li generalised the main theorem of [ TZ13b ], Theorem 2.7, so as to b e able to consider asymmetric structures. She defined the notion of a stationary we ak indep endenc e r elation (SWIR) : this is an indep endence relation satisfying the same axioms as a SIR but excluding the assumption of symmetry (see Theorem 2.2 ). F or example, in ( Q , < ) we define B | A C 2 ↶ ↶ ↷ ↷ v 0 v 1 v 2 v 3 Figure 1. An example of a 3-h yp ertournament, usually denoted by H 4 (see [ CHKN21 ]). The curv ed arrows denote an ticlo ckwise/clockwise orientations of each face (the grey arro ws are for the back faces): the an ticlo ckwise edges are ( v 0 , v 1 , v 3 ) , ( v 1 , v 2 , v 3 ) , ( v 2 , v 0 , v 3 ) , ( v 0 , v 2 , v 1 ) and their cyclic p ermutations. if, for all b ∈ B \ A , c ∈ C \ A suc h that there is no a ∈ A with ( b < a < c ) ∨ ( b > a > c ), we hav e b < c . Again, a SWIR corresp onds to a notion of canonical amalgamation (see [ KSW25 , Section 2]). Li likewise generalised the definition of a maximally-moving automorphism as follows. Let g b e an automorphism of a F ra ¨ ıss´ e structure M with SWIR | . W e say that g moves almost R-maximal ly if ev ery type p ( ¯ x/ A ) ov er A ⊆ f . g . M realisable in M has a realisation ¯ b ⊆ M with ¯ b | A g ( ¯ b ), and we sa y that g moves almost L-maximal ly if every type p ( ¯ x/ A ) ov er A ⊆ f . g . M realisable in M has a realisation ¯ b with g ( ¯ b ) | A ¯ b . The generalisation of the main theorem of T ent and Ziegler is then: F act 1.4 ([ Li21 , Thm. 4.0.4, Cor. 4.2.2, Cor. 4.2.4]) . L et M b e a F r a ¨ ıss´ e structur e with a SWIR. L et g ∈ Aut( M ) . Supp ose that at le ast one of the fol lowing c onditions holds: (i) g moves almost R-maximal ly and g − 1 moves almost L-maximal ly; or (ii) g moves b oth almost R-maximal ly and almost L-maximal ly. Then e ach element of Aut( M ) is a pr o duct of ≤ 16 c onjugates of g and g − 1 . (Li only considered relational languages, but her pro of works for any first-order language.) Li used her more general result to show simplicit y of the automorphism groups of several F ra ¨ ıss´ e structures: (i) the generic n -linear order for n ≥ 2 (that is, the F ra ¨ ıss ´ e limit of the class of all finite structures consisting of a set with n linear orders on it); (ii) the generic order expansion of a transitive F ra ¨ ıss´ e structure with free amalgamation which is not an indiscernible set; (iii) most of the “semi-free” examples of Cherlin (see the app endix of [ Che98 ]). Li did not consider lo cal SWIRs, and did not consider freeness. (W e believe Li’s main result should straight- forw ardly generalise to lo cal SWIRs analogously to the T ent-Ziegler result, though w e ha ve not chec k ed this in detail.) In [ KRR25 ], Kaplan, Riahi and Ro dr ´ ıguez F anlo applied Li’s techniques to sho w the simplicity of the automorphism group of the Rado meet-tree: that is, the generic meet-tree expansion of the Rado graph (in fact they show simplicit y for the generic meet-tree expansion of any non-unary free amalgamation structure). A second approach for asymmetric structures can b e found in [ CKT21 ], where Calderoni, Kwiatko wsk a and T ent also show ed simplicity for (ii) in the abov e list; simplicity for (i) was likewise pro v ed by Meißner in her master’s thesis ([ Mei21 ]) using the machinery of [ CKT21 ]. The pap er [ CKT21 ] introduces the notion of a we akly stationary indep endenc e r elation , whose definition differs from that of a SWIR. The authors also sho w the simplicity of Aut( M ) for M equal to the generic tournamen t expansion of a non-trivial transitive free amalgamation structure, as well as for M b eing the generic order/tournament expansion of the rational Urysohn space or the generic p oset. W e do not use this second approach in this pap er. 1.2. New results: n -hypertournaments, a new pro of for 2 π n -lo cal orders. One fo cus of this pap er will b e on tw o key families of F ra ¨ ıss´ e structures: the generic n -hypertournament and the dense 2 π n -lo cal order, for n ≥ 2. W e define these b elow. Definition 1.5. Let n ≥ 2, and let L T n b e a language consisting of a single n -ary relation symbol R . An n -hyp ertournament T is an L T n -structure where the automorphism group of each n -elemen t substructure is the alternating group Alt n . So, a 2-hypertournament is a tournamen t in the usual sense (an oriented complete graph), and a 3-hypertournament is a structure where each triple of points has a cyclic orien tation anticlockwise or clockwise (see Figure 1 ). W e let T n denote the class of finite n -hypertournaments; this is a F ra ¨ ıss´ e class (one 3 b c S (2) S 1 ( a, c ) d S (4) b c e S 3 ( a, e ) S 1 ( a, c ) S 2 ( a, d ) S 0 ( a, b ) S 0 ( a, b ) a a Figure 2. Examples of dense 2 π n -lo cal orders. just adds edges oriented arbitrarily). W e let T n denote the F ra ¨ ıss´ e limit of T n , and call T n the generic n - hyp ertournament . Definition 1.6. Let n ≥ 2, and let L ◦ n = { S j | j < n } b e a binary relational language. Let D b e the set of p oin ts on the unit circle with rational argument (this is a coun table dense subset of the unit circle). W e define an L ◦ n -structure S ( n ) with domain D : for distinct u, v ∈ D and j < n , define that S j ( u, v ) holds when the angle α ( u, v ) subtended at the origin by the anticlockwise arc from u to v satisfies 2 π j n < α ( u, v ) < 2 π ( j +1) n . W e call S ( n ) the dense 2 π n -lo c al or der . See Figure 2 . The structure S ( n ) is ultrahomogeneous: see Theorem 5.2 . W e show the following: Theorem A. L et n ≥ 3 . The automorphism gr oup of the generic n -hyp ertournament T n is simple. W e also give a new pro of of the following, originally sho wn by Droste, Giraudet and Macpherson in [ DGM95 ]: F act B. L et n ≥ 2 . The automorphism gr oup of the dense 2 π n -lo c al or der S ( n ) is simple. (W e lab el this as a F act rather than a Theorem to emphasise that the result was already kno wn, though our pro of is new. In fact, Droste, Giraudet and Macpherson show ed the simplicity of the automorphism groups of certain oriented graphs, which we denote by S ( n ); as the binary structure S ( n ) is interdefinable with the orien ted graph S ( n ), we ha v e Aut( S ( n )) = Aut( S ( n )), giving F act B. See the start of Section 5 .) 1.3. New results: orien ted graphs, including the semigeneric tournamen t. In [ Che98 ], Cherlin gives a classification of all countable ultrahomogeneous oriented graphs. See Section 6 for the detailed descriptions of the oriented graphs from this classification that we consider. W e sho w the following: Theorem C. R e c al l the fol lowing structur es fr om Cherlin ’s list, describ e d in Se ction 6 : • ¨ S (2) : the double c over of the dense lo c al or der S (2) ; • D n : the generic n -p artite tournament; • F : the generic ω -p artite C 4 -tournament; • P (3) : the twiste d p artial or der. We have the fol lowing classific ation of the normal sub gr oups of the automorphism gr oups of these structur es: (i) the only non-trivial pr op er normal sub gr oup of Aut( ¨ S (2)) is the sub gr oup gener ate d by the involution sending e ach p oint to its antip o dal p oint ( 6.1 ); (ii) the normal sub gr oups of Aut( D n ) ar e pr e cisely { π − 1 ( K ) | K ⊴ Sym n } , wher e π is the map sending e ach automorphism to the bije ction it induc es on the set of lab els of the n p arts ( 6.2 ); (iii) the only non-trivial pr op er normal sub gr oup of Aut( F ) is gener ate d by the involution which, for e ach p art, swaps the p air of vertic es within it ( 6.3 ); (iv) Aut( P (3)) is simple ( 6.4 ). The proof of Theorem C uses similar tec hniques to our proof of F act B, just in volving a little additional detectiv e w ork for each structure, and so we do not give more details in this introduction. One of the oriented graphs from Cherlin’s list, the semigeneric tournament, is more difficult to analyse, and we treat it in a separate section of the pap er, Section 7 . The semigeneric tournament S is the F ra ¨ ıss´ e limit of the 4 class of finite ω -partite tournaments (oriented graphs where the “non-edge” relation is an equiv alence relation) satisfying an additional p arity c ondition : for any t w o pairs { u, u ′ } and { v , v ′ } of v ertices in t wo different parts, the num b er of out-edges from { u, u ′ } to { v , v ′ } is even. W e show the following: Theorem D. The automorphism gr oup Aut( S ) of the semigeneric tournament S is simple. Note that F act B and Theorems C and D, together with the previous results mentioned in this introduction (for the coun tably infinite pure set, Q , the random tournament, the generic n -anticlique-free oriented graph, the generic poset and free amalgamation structures), giv e the normal subgroup lattice for the automorphism group of eac h coun tably infinite ultrahomogeneous orien ted graph in Cherlin’s list, with the exception of the orien ted graphs resulting from lexicographic pro ducts of Q , T 2 , S (2) with an anticlique. The automorphism groups of these lexicographic pro ducts are wreath pro ducts of the automorphism groups of the factors, and we imagine it will not b e difficult to determine the normal subgroups for these remaining cases – we did not consider these. 1.4. Wh y these particular structures? A new approach: SWIR expansions. The starting p oint of this pro ject was to consider the generic n -hypertournament T n and the dense 2 π n -lo cal order S ( n ). These are relativ ely well-kno wn F ra ¨ ıss´ e structures whose relations are asymmetric, and the initial aim of the authors was to apply the techniques of Li to show simplicity of their automorphism groups (for S ( n ), we only learnt of the prior result of Droste, Giraudet and Macpherson later on). Ho wev er, as b ecame clear during the pro ject, suc h a direct approac h cannot work. The structures T n for n ≥ 3 and S ( n ) for n ≥ 2 do not hav e SWIRs (see Theorem 4.2 , Theorem 5.3 ), and so it is not p ossible to directly apply the main result of Li (Theorem 1.4 ). In fact, it turns out that their automorphism groups do not even ha ve dense conjugacy classes (Theorem 4.1 , Theorem 5.3 ). This means that, even assuming a generalisation of the main result of Li to the case where M has a lo cal SWIR and Aut( M ) has a dense conjugacy class by analogy with the main T ent-Ziegler result Theorem 1.1 (indeed, the authors b elieve suc h a generalisation should b e straightforw ard to pro ve), it is not p ossible to apply this to Aut( T n ) (for n ≥ 3) or Aut( S ( n )) (for n ≥ 2). T ent and Ziegler give an example showing that the assumption of a dense conjugacy class is necessary ([ TZ13b , Example 2.11]). Th us, to show simplicity of Aut( T n ) and Aut( S ( n )), a different approach is required. The semigeneric tournamen t S in Theorem D do es not hav e a lo cal SWIR (Theorem 7.6 ), likewise meaning that the techniques of Li cannot b e directly applied. (F or the structures mentioned in Theorem C, some hav e lo cal SWIRs and some do not, but w e shall not use the lo cal SWIRs that do exist. See Section 6 .) The new approac h: SWIR expansions and stabiliser subgroups. The new approach w e take in this pap er, for a giv en F ra ¨ ıss ´ e structure M , is the follo wing, which w e refer to as the SWIR exp ansion metho d . • Step 1: First determine an expansion N of M where N has a SWIR and Aut( N ) is isomorphic to a stabiliser subgroup H ≤ Aut( M ), and use the techniques of Li, Macpherson, T ent and Ziegler to find the normal subgroups of Aut( N ) ∼ = H . • Step 2: Show that, for 1 = K ⊴ Aut( M ), w e hav e K ∩ H = 1: here one uses the fact that H is a stabiliser. As K ∩ H ⊴ H and we know the normal subgroups of H from Step 1, w e kno w what K ∩ H can b e. • Step 3: Use this information ab out K ∩ H to determine what K can b e, again using the fact that H is a stabiliser. In the particular case where H is simple, once we hav e sho wn K ∩ H = 1 in Step 2, we ha v e H ⊆ K . W e trace the lineage of this metho d as follows. In the initial stages of the pro ject, when the authors were attempting to show the simplicity of Aut( S (2)), David Ev ans suggested to the second author to inv estigate p oin t-stabiliser subgroups. This idea was the key inspiration for the developmen t of the three-step approach ab o ve. One can also find the idea of considering p oint-stabilisers in the brief pro of sketc h of [ Mac11 , Prop. 4.2.8] (which predates the SIR technology of [ TZ13b ]), where Macpherson sketc hes simplicity for the generic t wo-graph: he uses the fact that each p oint-stabiliser is isomorphic to the automorphism group of the Rado graph, and thus simple. Finally , the results of [ KRR25 ] giving the simplicity of the automorphism group of the Rado meet-tree T R are p erhaps the closest relative in the literature to the SWIR expansion metho d. The Rado meet-tree do es not ha ve a SWIR, and Kaplan, Riahi and Ro dr ´ ıguez F anlo get around this by taking tw o SWIR expansions, one fixing a p oin t and the other set wise-fixing a branch. They show that any automorphism of T R set wise-fixes a branch or is a fan (implying that it fixes a p oin t), meaning one can w ork in one of the tw o expansions, and they then use the techniques of Li to sho w simplicity . A k ey difference from our approach is that [ KRR25 ] uses a “divide-and-conquer” strategy , splitting all automorphisms in to different cases and using a SWIR expansion for each one. In the presen t pap er, we instead take the approach of finding a particular “w ell-b ehav ed” subgroup of automorphisms H , and then using group-theoretic techniques to show that this giv es us enough information to determine the normal closure for automorphisms in general. 5 1.5. The structure of the pap er and an outline of the v arious examples. • Section 2 : SWIRs and automorphisms mo ving almost R-/L-maximally . W e in tro duce SWIRs, giving some examples and basic lemmas, and we in tro duce the notion of automorphisms whic h mov e almost R-maximally/L-maximally . • Section 3 : free SWIRs and the p oint wise-stabiliser lemma. W e introduce the notion of a fr e e SWIR. When a SWIR is free, one do es not hav e to do complicated ad ho c back-and-forths to obtain automorphisms which mov e almost R-/L-maximally: w e hav e a general result giving these, Theorem 3.4 . This mak es simplicity proofs for structures with a free SWIR m uc h more straightforw ard (Theorem 3.5 ). W e also prov e a result which we refer to as the p ointwise-stabiliser lemma : this states that, under certain conditions on the structure, simplicit y of p oint wise-stabiliser subgroups giv es simplicity of the whole automorphism group. • Section 4 : the generic n -h yp ertournament T n . This is our first example of the SWIR expansion metho d. Here we take the p oint wise-stabiliser H of a tuple ¯ a of n − 2 p oin ts. One can use ¯ a to define a random tournamen t on dom( T n ) \ ¯ a : for each pair b, c ∈ dom( T n ) \ ¯ a , define b → c if ( ¯ a, b, c ) is an edge of T n . W e use this idea to show that H is isomorphic to an expansion of T n including a random tournamen t. W e define a free SWIR on this expansion, using the additional tournamen t structure to decide when an edge of T n is canonical, via sign maps and a small amoun t of algebra. This gives the simplicit y of H , and we then carry out Steps 2 and 3 of the SWIR expansion metho d to show the simplicit y of Aut( T n ). • Section 5 : the dense 2 π n -lo cal order S ( n ) . Here each p oint-stabiliser is isomorphic to the auto- morphism group of the generic n -coloured linear order Q n . W e then extend results of Li to find the normal subgroups of Aut( Q n ), generalising the classical result of Higman for Aut( Q ), and use these to sho w simplicity of Aut( S ( n )). • Section 6 : other oriented graphs. Here we consider the four orien ted graphs men tioned in Theorem C. The techniques are similar to those in the previous tw o sections, though the pro ofs are not en tirely straigh tforward. (F or D n w e consider setwise stabilisers, and for P (3) we use the result of Glass, McCleary and Rubin giving the simplicity of the automorphism group of the generic p oset.) • Section 7 : the semigeneric tournamen t S . This is the most in v olv ed example of the pap er. W e find a SWIR expansion S ρ of S , and show that Aut( S ρ ) is simple: as the SWIR is not free, this requires some extra work. W e then show that Aut( S ρ ) is isomorphic to the set wise-stabiliser of a generic tr ansversal of S , and use this to carry out Steps 2 and 3 of the SWIR expansion metho d. • Section 8 : further questions. Here we consider further questions regarding the scop e of the SWIR expansion metho d. 2. St a tionar y weak independence rela tions (SWIRs) and automorphisms moving almost R-/L-maximall y Notation 2.1. Belo w, we write AB to mean the substructure generated by A ∪ B . Let M b e a F ra ¨ ıss ´ e structure, and let A, B , B ′ ⊆ f . g . M . W e write B ≡ A B ′ if there exists f ∈ Aut( M ) with f ( B ) = B ′ and f | A = id A , or equiv alen tly if B , B ′ ha ve the same type ov er A in some enumeration. In the b elo w stationarity axiom, when we write B ≡ A B ′ ⇒ B ≡ AC B ′ , b oth automorphisms agree on B A . Throughout the rest of the pap er, w e will also b e somewhat cav alier with our use of parentheses for the argumen ts of functions: we will often write g a , g A rather than g ( a ), g ( A ) when this do es not imp ede clarit y . Definition 2.2 ([ Li21 , Definition 3.1.1]) . Let M b e a F ra ¨ ıss´ e structure. A stationary we ak indep endenc e r elation (SWIR) on M is a ternary relation | on the set of finitely generated substructures of M , written B | A C , satisfying the following four prop erties: • In v ariance (In v): for all A, B , C ⊆ f . g . M and g ∈ Aut( M ) we ha v e B | A C ⇒ g B | g A g C ; • Existence (Ex): for all A, B , C ⊆ f . g . M , – (LEx): there exists B ′ ⊆ f . g . M with B ≡ A B ′ suc h that B ′ | A C ; – (REx): there exists C ′ ⊆ f . g . M with C ≡ A C ′ suc h that B | A C ′ ; • Stationarit y (Sta): for all A, B , C ⊆ f . g . M , – (LSta): if B | A C ∧ B ′ | A C and B ≡ A B ′ , then B ≡ AC B ′ ; – (RSta): if B | A C ∧ B | A C ′ and C ≡ A C ′ , then C ≡ AB C ′ ; • Monotonicit y (Mon): for all A, B , C, D ⊆ f . g . M , – (LMon): B D | A C ⇒ B | A C ∧ D | AB C ; – (RMon): B | A C D ⇒ B | A C ∧ B | AC D ; W e call a ternary relation | defined on the set of non-empty finitely generated substructures of M a lo c al SWIR if it satisfies the ab ov e axioms. 6 Giv en a SWIR | , we extend | to the set of finite subsets of M by defining B | A C if ⟨ B ⟩ | ⟨ A ⟩ ⟨ C ⟩ . Definition 2.3. Let M b e a F ra ¨ ıss´ e structure, and let | b e a (lo cal) SWIR on M . If in addition | is symmetric, i.e. for all A, B , C ⊆ f . g . M we hav e B | A C ⇔ C | A B , then we call | a (lo cal) stationary indep endenc e r elation (SIR). W e briefly give some examples of F ra ¨ ıss ´ e structures with SWIRs/SIRs (see [ KSW25 , Example 2.7]). Example 2.4. • A relational F ra ¨ ıss ´ e structure M with free amalgamation has a SIR: for A, B , C ⊆ fin M , define B | A C if B A, C A are freely amalgamated o v er A . • The rational Urysohn s pace has a lo cal SIR: define B | A C if, for all b ∈ B \ A , c ∈ C \ A , w e hav e d ( b, c ) = min a ∈ A ( d ( b, a ) + d ( c, a )). • Q has a SWIR: define B | A C if, for all b ∈ B \ A , c ∈ C \ A such that there is no a ∈ A with b < a < c or b > a > c , we hav e b < c . • The random tournament has a SWIR: define B | A C if for all b ∈ B \ A , c ∈ C \ A we ha ve b → c . • The dense 2 π n -lo cal order S ( n ) has a lo cal SWIR: this is a straightforw ard generalisation of [ KSW25 , Prop osition 5.15]. Recall that a F ra ¨ ıss ´ e class K has str ong amalgamation if, for all pairs of em b eddings B 0 ← A → B 1 in K , there exists an amalgam B 0 → C ← B 1 in K such that the images of B 0 , B 1 in tersect exactly in the image of A . (Some authors refer to thi s as disjoint amalgamation .) W e also sa y that a F ra ¨ ıss ´ e limit has strong amalgamation if its age do es. W e collect a num ber of basic prop erties of SWIRs in the b elow Theorem 2.5 . F or pro ofs (whic h are not difficult) see [ KSW25 , Section 2] and [ Li21 , Remark 3.1.2]. Lemma 2.5. L et M b e a F r a ¨ ıss´ e structur e with (lo c al) SWIR | . Then we have: • tr ansitivity (T r): for al l A, B , C, D ⊆ f . g . M , – B | A C ∧ B | AC D ⇒ B | A C D , – B | A C ∧ D | AB C ⇒ B D | A C ; • b ase triviality: for al l A, B ⊆ f . g . M we have A | A B ∧ B | A A , and for al l A, B , C ⊆ f . g . M , – B | A C ⇒ AB | A C , – B | A C ⇒ B | A AC . In the c ase that M has str ong amalgamation: for al l A, B , C ⊆ f . g . M , if B | A C then ( B \ A ) ∩ ( C \ A ) = ∅ . F act 2.6 ([ KR07 , Theorem 1.1]) . L et M b e a F r a ¨ ıss´ e structur e. L et Age( M ) p b e the class c onsisting of p airs ( A, f ) wher e A ∈ Age( M ) and f is a p artial automorphism of A (that is, an isomorphism b etwe en finitely gener ate d substructur es of A ). Then Aut( M ) has a dense c onjugacy class if and only if Age( M ) p has the joint emb e dding pr op erty. Lemma 2.7. L et M b e a F r a ¨ ıss´ e structur e with a SWIR. Then Aut( M ) has a dense c onjugacy class. Pr o of. By Theorem 2.6 , it suffices to show that Age( M ) p has the joint embedding prop ert y . Let ( A, f ) , ( B , f ′ ) ∈ Age( M ) p . As A ∈ Age( M ), we may assume A ⊆ M , and b y (Ex) there is B ′ ⊆ M , B ′ ∼ = B with A | B ′ . Let f ′′ denote the partial automorphism of B ′ corresp onding to f ′ . By (Mon) we hav e dom( f ) | dom( f ′′ ) and im( f ) | im( f ′′ ). By ultrahomogeneity of M there is g ∈ Aut( M ) extending f , so by (Inv) we hav e im( f ) | g (dom( f ′′ )). So by (Sta) the isomorphism g ◦ ( f ′′ ) − 1 extends to an isomorphism h : im( f ) im( f ′′ ) → im( f ) g (dom( f ′′ )) with id im( f ) ⊆ h , and thus f ∪ f ′′ extends to a partial automorphism of AB ′ . □ R emark 2.8 . Kaplan and Simon show ed that if a F ra ¨ ıss ´ e structure M has a weak er notion of indep endence relation called a CIR on its finitely generated substructures, then Aut( M ) has a cyclic al ly dense conjugacy class, which implies Theorem 2.7 . See [ KS19 , Cor. 3.9, Th. 3.12]. Definition 2.9. Let M b e a F ra ¨ ıss´ e structure. W e call a type p ( ¯ x/ A ) ov er A ⊆ f . g . M r e alisable if p has a realisation in M . W e sa y that a realisable type p ( ¯ x/ A ) is exterior if it contains the formula x i = a for each x i ∈ ¯ x and a ∈ A . Notation 2.10. When we write p ( ¯ x/ A ), we will assume that A is a finitely generated substructure of M unless sp ecified otherwise. Of course, one can also view p ( ¯ x/ A ) as a type ov er a finite parameter set by taking a finite set of generators of A , and we are quite relaxed ab out the distinction here. As we only work with F ra ¨ ıss ´ e structures M , we ha v e that ¯ b, ¯ b ′ ⊆ M hav e the same type ov er A ⊆ f . g . M ⇐ ⇒ ¯ b, ¯ b ′ ha ve the same quan tifier-free t yp e ov er A ⇐ ⇒ ¯ b, ¯ b ′ lie in the same orbit of the co ordinate-wise action Aut( M ) ( A ) ↷ M | ¯ x | . (Here Aut( M ) ( A ) denotes the p oint wise-stabiliser of A in Aut( M ).) 7 Definition 2.11 ([ Li21 , Definition 4.0.3]) . Let M b e a F ra ¨ ıss ´ e structure with SWIR | . Let g ∈ Aut( M ). Let p ( ¯ x/ A ) b e a realisable type o v er A ⊆ f . g . M . • W e say that g moves p almost R-maximal ly if there is a realisation ¯ b of p suc h that ¯ b | A g ¯ b . • W e say that g moves p almost L-maximal ly if there is a realisation ¯ b of p suc h that g ¯ b | A ¯ b . W e sa y that g moves almost R-/L-maximal ly if, for an y realisable t ype p ( ¯ x/ A ) (where | ¯ x | is arbitrary), we hav e that g mo v es p almost R-/L-maximally . F act 2.12 ([ Li21 , Lemma 5.0.1]) . L et M b e a F r a ¨ ıss´ e structur e with SWIR | and g ∈ Aut( M ) . Supp ose g moves al l exterior typ es almost R-/L-maximal ly. Then g moves almost R-/L-maximal ly. 3. Free SWIRs and the pointwise-st abiliser lemma T erminology . W e call a F ra ¨ ıss ´ e structure with strong amalgamation a str ong F r a ¨ ıss´ e structur e . Notation. When we write ¯ a ∩ ¯ b or ¯ a ∪ ¯ b , w e mean the intersection or union of the underlying domains of the tuples ¯ a , ¯ b . W e use this notation throughout the rest of this pap er. Lemma 3.1. L et M b e a str ong F r a ¨ ıss´ e structur e. L et g ∈ Aut( M ) . Supp ose that, for any exterior 1 -typ e p , some r e alisation of p is not fixe d by g . Then for any V ⊆ f . g . M , any n ≥ 1 and any exterior n -typ e q , we c an find a r e alisation ¯ b | = q in M with ¯ b ∩ g ¯ b = ∅ and ( ¯ b ∪ g ¯ b ) ∩ V = ∅ . Pr o of. W e use induction on n ≥ 1. Assume the statement for k < n , and let q ( ¯ x, y / A ) b e an exterior n -type o ver some A ⊆ f . g . M with | ¯ x | = n − 1. Let r ( ¯ x/ A ) b e the pro jection of q to ¯ x . Note that r is exterior. By the induction h yp othesis r has a realisation ¯ b ⊆ M \ A with ¯ b ∩ g ¯ b = ∅ and ( ¯ b ∪ g ¯ b ) ∩ V = ∅ . If q contains the form ula y = x i for some i < | ¯ x | , w e are done, so assume not. As M has strong amalgamation, there is c ∈ M with tp( ¯ b, c/ A ) = q and c / ∈ g ( ¯ b ) V g − 1 ( ¯ bV ). Let q ′ = tp( c/ A ¯ bV g ( ¯ b ) g − 1 ( ¯ bV )). Then b y assumption there is a realisation c ′ ∈ M of q ′ with g c ′ = c ′ . W e then hav e tp( ¯ b, c ′ / A ) = q and ( ¯ b, c ′ ) is as required. □ 3.1. F ree SWIRs. Definition 3.2. Let M b e a F ra ¨ ıss ´ e structure with SWIR | . W e sa y that | is fr e e if, for all A, B , C ⊆ f . g . M with B | A C , we hav e B | A ′ C for all ( B C ) ∩ A ⊆ A ′ ⊆ A . The ab ov e definition was giv en for SIRs in [ TZ13b , Lemma 5.1], and first named in [ Con17 ]. Example 3.3. In The orem 2.4 , SWIRs are given for structures with free amalgamation and the random tournamen t: it is straightforw ard to chec k that these are free. The SWIR defined for ( Q , < ) is not free: let a, b, c ∈ Q with b > a > c , and note that b | a c but b, c are not indep endent o ver ∅ . The pro of of the b elow lemma is inspired by [ TZ13b , Lemma 5.1]; some mo difications are required. Lemma 3.4. L et M b e a str ong F r a ¨ ıss´ e structur e with fr e e SWIR | . L et g ∈ Aut( M ) . Supp ose that for any exterior 1 -typ e p , some r e alisation of p is not fixe d by g . Then ther e is h ∈ Aut( M ) such that [ g , h ] moves almost R -maximal ly and [ g , h ] − 1 moves almost L -maximal ly. Pr o of. Let v 0 , · · · b e an enumeration of the elements of M , and let p 0 , · · · b e an enumeration of the exterior realisable types ov er finitely generated substructures of M , where eac h p i has finitely many free v ariables and has parameter set A i ⊆ f . g . M . W e will define an increasing chain h 0 ⊆ · · · of partial isomorphisms of M such that, for i < ω , w e ha ve v i ∈ dom( h i ) ∩ im( h i ) and there is a realisation ¯ b of p i with ¯ b | A i [ g , h i ]( ¯ b ) and [ g , h i ] − 1 ( ¯ b ) | A i ¯ b . T aking h = S i<ω h i , by Theorem 2.12 we will ha ve that h is as required. Supp ose that h 0 , · · · , h i − 1 are already given satisfying the abov e conditions. Extend h i − 1 using the ultrahomo- geneit y of M to a partial isomorphism h ′ with v i ∈ dom( h ′ ) ∩ im( h ′ ), g A i ⊆ dom( h ′ ) and A i ⊆ dom( h ′− 1 ◦ g ◦ h ′ ). Let U = dom( h ′ ). By Theorem 3.1 , there is a realisation ¯ b of p i with ¯ b ∩ g ¯ b = ∅ and ¯ b ∩ ( U ∪ g − 1 U ) = ∅ , and there is a realisation ¯ c of h ′ · tp( ¯ b/U ) with ¯ c ∩ g ¯ c = ∅ and ¯ c ∩ g − 1 ( h ′ ( U )) = ∅ . Let h ′′ b e the extension of h ′ b y the map ¯ b 7→ ¯ c (extending so that dom( h ′′ ) ⊆ f . g . M ). By (Ex) there is ¯ d ⊆ M with tp( ¯ d/U ¯ b ) = h ′′− 1 · tp( g ( ¯ c ) /h ′′ ( U )¯ c ) and g ¯ b | U ¯ b ¯ d . W e let h i b e the extension of h ′′ b y ¯ d 7→ g ¯ c (again extending so that dom( h i ) ⊆ f . g . M ). W e hav e ( g ( ¯ b ) ¯ d ) ∩ ( U ¯ b ) = ∅ . So b y freeness w e hav e g ¯ b | g A i ¯ d and g ¯ b | ( h − 1 i g h i )( A i ) ¯ d . By (Inv) we ha ve ¯ b | A i g − 1 ( ¯ d ) and ¯ b | [ g ,h i ]( A i ) g − 1 ( ¯ d ), and as g − 1 ( ¯ d ) = [ g , h i ]( ¯ b ), we are done (where for the second indep endence we use (In v) once more). □ Com bining the ab ov e lemma with Theorem 1.4 we immediately hav e: Prop osition 3.5. L et M b e a str ong F r a ¨ ıss´ e structur e with fr e e SWIR | . Supp ose that: 8 ( ∗ ) for any g ∈ Aut( M ) \ { id } and any exterior 1 -typ e p , some r e alisation of p is not fixe d by g . Then Aut( M ) is simple. R emark 3.6 . In [ MT11 ], Theorem 3.4(a) states that the following structures hav e simple automorphism groups: transitiv e free amalgamation structures which are not an indiscernible set, the random tournamen t and the generic n -an ticlique-free orien ted graph. A pro of is giv en for transitiv e non-trivial free amalgamation structures, and then the authors sketc h how to t w eak the pro of for the other tw o structures (in fact, the indep endence relation for the random tournament already app ears in [ MT11 ], without the general axiomatisation of SWIRs). Theorem 3.5 enables a (v ery sligh tly) more streamlined presentation of this result: it suffices to show condition ( ∗ ) for each of these structures. F or transitive non-trivial free amalgamation structures, condition ( ∗ ) is given b y [ MT11 , Corollary 2.10]. F or the other tw o structures, see Theorem 4.7 (the pro of of this lemma requires a minor adaptation for the generic orien ted graph omitting n -anticliques: rather than taking ¬ R ( u m , g v ) and ¬ R ( b, g u ), we take R ( g v , u m ) and R ( g u, b )). 3.2. The p oint wise-stabiliser lemma. Notation 3.7. Let M b e a relational structure and let n ≥ 1. W e write ( M ) n for the set of n -tuples in M n whic h consist of distinct elements. W e write [ M ] n for the set of subsets of M of size n . Let G ↷ X be a group action, and let A ⊆ X . W e write G ( A ) for the p oin twise-stabiliser of A : that is, G ( A ) = { g ∈ G | g · a = a for all a ∈ A } . Definition 3.8. Let M b e a relational structure, and let n ≥ 1. W e say that M is n -tr ansitive if the action of Aut( M ) on the domain of M is n -transitive: that is, for all ¯ a, ¯ b ∈ ( M ) n there is g ∈ Aut( M ) with g (¯ a ) = ¯ b . (Note that this implies that all elemen ts of ( M ) n ha ve the same type ov er ∅ .) The b elow Theorem 3.9 sho ws that, under certain conditions, Steps 2 and 3 of the SWIR expansion method are automatic (see Section 1.4 ). Note that in the b elow Theorem 3.9 we only consider relational structures. Lemma 3.9. L et M b e an n -tr ansitive str ong r elational F r a ¨ ıss´ e structur e, and let G = Aut( M ) . Supp ose that the fol lowing hold: (i) for al l ¯ a, ¯ b ∈ ( M ) n with ¯ a ∩ ¯ b = ∅ , ther e is ¯ c ∈ ( M ) n with tp(¯ a, ¯ c ) = tp( ¯ b, ¯ c ) ; (ii) for al l A ⊆ M with | A | = n , the p ointwise-stabiliser G ( A ) is simple. Then G is simple. Pr o of. Let K ⊴ G , K = 1. Let f ∈ K \ { id } , and let v ∈ M with v = f ( v ). T ake C ∈ [ M ] n suc h that { v , f ( v ) } ∩ ( C ∪ f ( C )) = ∅ . As M has strong amalgamation and is relational, there is g ∈ G fixing C ∪ f ( C ) ∪ { v } p oin twise with g ( f ( v )) = f ( v ). Then [ g , f ]( v ) = v , and as [ g , f ] ∈ K ∩ G ( C ) w e hav e K ∩ G ( C ) = 1. As M is n -transitiv e, for eac h A ∈ [ M ] n w e ha v e h ∈ G with h ( A ) = C , so [ g, f ] h ∈ K ∩ G ( A ) . Th us for all A ∈ [ M ] n w e ha ve K ∩ G ( A ) = 1, and as G ( A ) is simple we th us hav e G ( A ) ⊆ K . No w let g ∈ G . If g fixes ≥ n elements of M then by the ab ov e w e hav e g ∈ K . Otherwise g fixes ≤ n − 1 elemen ts of M , and so has infinite supp ort. So there exists ¯ a ∈ ( M ) n with ¯ a ∩ g ¯ a = ∅ . By assumption, there is ¯ c ∈ ( M ) n with tp(¯ a, ¯ c ) = tp( g ( ¯ a ) , ¯ c ). T ake f ∈ G with f (¯ a, ¯ c ) = ( g ( ¯ a ) , ¯ c ). Then as f ( ¯ c ) = ¯ c we hav e f ∈ K , and as g − 1 f ¯ a = ¯ a w e hav e g − 1 f ∈ K , so g ∈ K . Thus K = G , and hence G is simple. □ 4. The generic n -hyper tournament Recall the definition of the generic n -h ypertournament T n from Theorem 1.5 . W e first show that the techniques of Li, Macpherson, T ent and Ziegler cannot b e applied to T n directly . Lemma 4.1. F or n ≥ 3 , the gr oup Aut( T n ) do es not have a dense c onjugacy class. Pr o of. W e use Theorem 2.6 . Let A ∈ Age( T n ) consist of 2 p oints, and let f A ∈ Aut( A ) b e the automorphism sw apping these p oints. Let B ∈ Age( T n ) consist of n − 2 p oints, and let f B = id B . Then there is no ( C, f C ) ∈ Age( T n ) p that ( A, f A ) and ( B , f B ) jointly em bed into. □ Lemma 4.2. F or n ≥ 3 , the generic n -hyp ertournament T n do es not have a SWIR. Pr o of. This follows from Theorem 4.1 and Theorem 2.7 . Alternatively , w e may show this directly . Supp ose for a con tradiction that T n has a SWIR | . T ake ( A, f A ) , ( B , f B ) from the pro of of Theorem 4.1 . By (Ex) w e ma y assume A, B ⊆ T n and A | B . But, as in the pro of of Theorem 2.7 , any pair of automorphisms of A and B m ust extend to an automorphism of AB , by (In v), (Sta) and the ultrahomogeneit y of M – contradiction. □ W e now find an expansion of T n with a free SWIR. 9 Definition 4.3. Let I b e a finite set, and for eac h i ∈ I let n i ≥ 2. Let # — n I = ( n i ) i ∈ I . Let L I = { R i | i ∈ I } b e a relational language where eac h R i , i ∈ I , has arity n i . An # — n I -hyp ertournament T = ( A, ( R T i ) i ∈ I ) is an L I -structure (writing A for the domain and ( R T i ) i ∈ I for the relations) such that, for each i ∈ I , the reduct ( A, R T i ) is an n i -h yp ertournament. W e will not notationally distinguish the structure and its domain, and just write T for b oth. Let T # — n I denote the class of finite # — n I -h yp ertournaments; it is straightforw ard to see that T # — n I has strong amalgamation. W e call the F ra ¨ ıss´ e limit of T # — n I the generic # — n I -hyp ertournament , denoted T # — n I . In the b elow definition, recall Theorem 3.7 . Definition 4.4. Let T b e an # — n I -h yp ertournament. Let i ∈ I . W e define the sign map ρ T i : ( T ) n i → { +1 , − 1 } as follows: ρ T i ( ¯ v ) = ® +1 ¯ v ∈ R T i − 1 ¯ v / ∈ R T i . When T is clear from context w e just write ρ i ( ¯ v ). It is immediate that, given t wo # — n I -h yp ertournaments T , T ′ on the same domain A with ρ T i ( ¯ v ) = ρ T ′ i ( ¯ v ) for all i ∈ I and ¯ v ∈ ( A ) n i , we ha v e T = T ′ . Notation 4.5. W e write Sym n and Alt n for the symmetric group and the alternating group on { 0 , · · · , n − 1 } , and for σ ∈ Sym n w e write ε ( σ ) for the sign of σ in the usual p ermutation group sense: that is, +1 if σ is an ev en p ermutation and − 1 if σ is o dd. The following Theorem 4.6 is immediate. Lemma 4.6. L et A b e a set, and let n ≥ 2 . L et f : ( A ) n → { +1 , − 1 } b e a function such that, for al l σ ∈ Sym n and ( v 0 , · · · , v n − 1 ) ∈ ( A ) n , we have f ( v σ (0) , · · · , v σ ( n − 1) ) = ε ( σ ) f ( v 0 , · · · , v n − 1 ) . Then ( A, { ¯ v ∈ ( A ) n | f ( ¯ v ) = 1 } ) is an n -hyp ertournament (with sign map f ). Lemma 4.7. L et I b e a finite set, and for e ach i ∈ I let n i ≥ 2 . L et # — n I = ( n i ) i ∈ I . L et g ∈ Aut( T # — n I ) \ { id } . L et p b e an exterior 1 -typ e. Then some r e alisation of p is not fixe d by g . Pr o of. Let j ∈ I . Let v ∈ T # — n I with g v = v . As T # — n I has strong amalgamation, there are infinitely many disjoin t ( n j − 1)-tuples ¯ u 0 , · · · consisting of distinct elements of T # — n I suc h that, for each m < ω , w e hav e T # — n I | = R j ( ¯ u m , v ) ∧ ¬ R j ( ¯ u m , g v ) and hence g ¯ u m = ¯ u m . So g has infinite supp ort. Let A b e the parameter set of p . As g has infinite supp ort, there exists an ( n j − 1)-tuple ¯ u ⊆ T # — n I with ¯ u, g ¯ u, A pairwise disjoin t. T aking b ∈ T # — n I with b | = p and T # — n I | = R j ( b, ¯ u ) ∧ ¬ R j ( b, g ¯ u ), w e ha v e g b = b as required. □ Prop osition 4.8. L et I b e a finite set, and for e ach i ∈ I let n i ≥ 2 . L et # — n I = ( n i ) i ∈ I . Supp ose that ther e exists δ ∈ I with n δ = 2 . Then the generic # — n I -hyp ertournament T # — n I has a fr e e SWIR, and Aut( T # — n I ) is simple. Pr o of. Let A, B , C ⊆ fin T # — n I . W e define B | A C if ( B \ A ) ∩ ( C \ A ) = ∅ and the following hold: • for each b ∈ B \ A , c ∈ C \ A we ha ve ρ δ ( b, c ) = 1; • for each i ∈ I and each n i -tuple ¯ v ∈ (( A ∪ B ∪ C )) n i of distinct elements with ( ¯ v ∩ ( B \ A ) = ∅ ) ∧ ( ¯ v ∩ ( C \ A ) = ∅ ), we ha v e ρ i ( ¯ v ) = Y m σ ( y ). Thus the functions f i satisfy the condition of Theorem 4.6 , giving a # — n I -h yp ertournament E extending the # — n I -h yp ertournaments B A , C ′ A . W e may then assume E is em b edded o ver B A in T # — n I using the extension prop ert y , and it is clear that B | A C ′ as required. W e then hav e simplicit y of Aut( T # — n I ) by Theorem 4.7 and Theorem 3.5 . □ Lemma 4.9. L et n ≥ 2 . L et A ⊆ fin T n , | A | = n − 2 . Then the p ointwise-stabiliser Aut( T n ) ( A ) is simple. 10 Pr o of. Recall that we write R T n for the edge relation of the generic n -hypertournament T n , and L T n for the language of this structure. F or eac h A ′ ⊆ A , take an arbitrary ordering ¯ u A ′ of A ′ , and let U = { ¯ u A ′ | A ′ ⊆ A } . F or ¯ u ∈ U , let n ¯ u = n − | ¯ u | . Let # — n U = ( n ¯ u ) ¯ u ∈U and let L U = { R ¯ u | ¯ u ∈ U } be a relational language where the arity of eac h R ¯ u is n ¯ u . Define an L U -structure T ′ as follows: • dom( T ′ ) = dom( T n ) \ dom( A ); • for each ¯ u ∈ U we define R T ′ ¯ u = { ¯ v ∈ (dom( T ′ )) n ¯ u | ( ¯ u, ¯ v ) ∈ R T n } . W e first observ e that T ′ is an # — n U -h yp ertournament: this follo ws from the fact that, in the standard permutation action Alt n ↷ n , the p oint wise-stabiliser of X ⊆ n is the alternating group on the complement of X . T o see that T ′ is isomorphic to the generic # — n U -h yp ertournament T # — n U , we verify that the tw o structures ha v e equal age and that T ′ has the extension property . Let B ′ ⊆ fin T ′ (where potentially B ′ = ∅ ) and let f : B ′ → C ′ b e an embedding in Age( T # — n U ). W e may assume f | B ′ = id B ′ and dom( C ′ ) ∩ dom( A ) = ∅ . Define an L T n -structure E on dom( A ) ∪ dom( C ′ ) b y: for each ¯ u ∈ U and ¯ v ∈ (dom( C ′ )) n ¯ u with ¯ v ∈ R C ′ ¯ u , w e specify σ ( ¯ u, ¯ v ) ∈ R E for all ev en p ermutations σ of the n -tuple ( ¯ u, ¯ v ). Then E is an n -hypertournament extending the n -h yp ertournamen t induced by T n on dom( A ) ∪ dom( B ′ ), which w e denote b y D . So by the extension prop erty of T n w e may realise E in T n extending D , and then b y the definition of T ′ w e hav e that the # — n U -h yp ertournament induced by T ′ on dom( E ) \ dom( A ) is a realisation of C ′ extending B ′ , as required. So T ′ ∼ = T # — n U . It is straightforw ard to see that we hav e an isomorphism Aut( T n ) ( A ) → Aut( T ′ ), g 7→ g | dom( T ′ ) . So Aut( T n ) ( A ) ∼ = Aut( T # — n U ), and the latter is simple b y Theorem 4.8 . □ Theorem A. L et n ≥ 3 . The automorphism gr oup of the generic n -hyp ertournament T n is simple. Pr o of. This follows b y Theorem 3.9 : it is immediate that T n is an ( n − 2)-transitiv e strong F ra ¨ ıss´ e structure, condition (i) is easily verified, and condition (ii) is giv en by Theorem 4.9 . □ 5. The dense 2 π n -local order S ( n ) Recall the language L ◦ n and the L ◦ n -structure S ( n ) from Theorem 1.6 . Before giving a new pro of of F act B, we first discuss the original result of Droste, Giraudet and Macpherson ([ DGM95 ]). The reader ma y b e familiar with lo cal orders in the case n = 2 , 3 defined as orien ted graphs, rather than as the binary relational structures S ( n ). Let D b e the set of p oints on the unit circle with rational argumen t. F or n ≥ 2, let S ( n ) be the orien ted graph with domain D defined as follows: for distinct u, v ∈ D , w e define u → v if the angle subtended at the origin by the anticlockwise arc from u to v is < 2 π n . The orien ted graphs S (2), S (3) are ultrahomogeneous, via an immediate adaptation of Theorem 5.2 , and S ( n ) is not ultrahomogeneous for n ≥ 4 (this is not difficult to see). Nonetheless, for each n ≥ 2, it is straightforw ard to see that S ( n ) and S ( n ) are interdefinable, and th us Aut( S ( n )) = Aut( S ( n )). In [ DGM95 ], Droste, Giraudet and Macpherson show ed the simplicity of Aut( S ( n )) for all n ≥ 2 (without discussing the binary relational structures S ( n )), and th us this result gives the simplicit y of Aut( S ( n )) for all n ≥ 2, which is F act B. W e now b egin our new approach to sho wing F act B, via the SWIR expansion metho d. Definition 5.1. Let U denote the unit circle in the complex plane. F or θ ∈ R we write ρ ( θ ) = e iθ . F or u, v ∈ U , we write α ( u, v ) for the angle subtended at the origin by the anticlockwise arc from u to v , with 0 ≤ α ( u, v ) < 2 π . W e consider U as a L ◦ n -structure containing S ( n ) in the natural manner: for u, v ∈ U and j < n , we define U | = S j ( u, v ) if 2 π j n < α ( u, v ) < 2 π ( j +1) n . W e define op en interv als in U as follows. F or u, u ′ ∈ U with 0 < α ( u, u ′ ) ≤ 2 π n , we define the op en in terv al ⟨ u, u ′ ⟩ := { v ∈ U | S 0 ( u, v ) ∧ S 0 ( v , u ′ ) } ; note that ⟨ u, u ′ ⟩ is linearly ordered by S 0 . W e only use the notation ⟨ u, u ′ ⟩ specifically for op en in terv als of the structure U : when considering substructures V ⊆ U , we will b e careful to write ⟨ u, u ′ ⟩ ∩ V . F or v ∈ U and k ∈ Z , let v ↑ k = e i 2 πk n v , and for A ⊆ U let A ↑ k = { v ↑ k | v ∈ A } . F or u, v ∈ U w e hav e: (5.1) S l ( u, v ) ⇔ S l + k ′ − k (mod n ) ( u ↑ k , v ↑ k ′ ) . F or A ⊆ U , we define ˆ A = S 0 ≤ k 1 is new, though the authors imagine it could b e obtained via classical metho ds as a straightforw ard generalisation of the case n = 1. W e prov e Theorem 5.8 by a new approac h, using the b elow result of Li: Lemma 5.9 (immediate generalisation of [ Li21 , Cor. 5.2.21]) . L et M b e a str ong F r a ¨ ıss´ e structur e with a SWIR, and let M < b e its generic line ar or der exp ansion. L et g ∈ Aut( M < ) b e unb ounde d. Then the normal closur e of g is Aut( M < ) . Li only states and prov es the ab o v e result for the case M < = Q (see [ Li21 , Corollary 5.2.21]), and in this case the result is classical ([ Llo64 ]). The pro of of Li using SWIRs is how ev er new, and her argument directly generalises to give Theorem 5.9 : in the pro of of [ Li21 , Corollary 5.2.21], Li applies Theorem 5.2.12, Lemma 5.2.16 and Corollary 4.2.4 from the same pap er to Q , but these results are actually stated for M < as ab o ve – so her argument immediately generalises, giving Theorem 5.9 . Pr o of of The or em 5.8 . Let g ∈ Aut( Q n ) \ { id } . Let C b e the conv ex closure of supp( g ). W e first sho w that for eac h c ∈ C , there are a, b ∈ supp( g ) with a < c < b : if c / ∈ supp( g ) this is immediate, and if c ∈ supp( g ) we ha ve g c, g − 1 c ∈ supp( g ) and ( g − 1 c < c < g c ) ∨ ( g c < c < g − 1 c ). So g | C ∈ Aut( C ) is unbounded within C , and C is without endp oints. As Q n is colour-dense, so is C by conv exity , and thus C ∼ = Q n . Let θ : C → Q n b e an isomorphism. Then θ induces an isomorphism Θ : Aut( C ) → Aut( Q n ) given by Θ( f ) = θ ◦ f ◦ θ − 1 . As g | C ∈ Aut( C ) is unbounded, we hav e that Θ( g | C ) ∈ Aut( Q n ) is unbounded and so has normal closure Aut( Q n ) b y Theorem 5.9 . So g | C has normal closure Aut( C ). Let K be the normal closure of g in Aut( Q n ). Via the isomorphism Aut( C ) → { h ∈ Aut( Q n ) | supp( h ) ⊆ C } given by f 7→ f ∪ id Q n \ C w e hav e { h ∈ Aut( Q n ) | supp( h ) ⊆ C } ⊆ K . W e now show the follo wing: (i) if g is unbounded then K = Aut( Q n ); (ii) if g is b ounded then K = B ( Q n ); (iii) if g is unbounded ab ov e and b ounded b elow then K = L ( Q n ); (iv) if g is unbounded b elow and b ounded ab ov e then K = R ( Q n ). (i) : As g is unbounded we ha ve C = Q n , and as { h ∈ Aut( Q n ) | supp( h ) ⊆ C } ⊆ K we ha ve K = Aut( Q n ). (ii) : Let a, b ∈ C with a < b . Let f ∈ B ( Q n ), and let a ′ , b ′ ∈ Q n with supp( f ) ⊆ [ a ′ , b ′ ]. Let h ∈ Aut( Q n ) with h ( a ) = a ′ , h ( b ) = b ′ . Then supp( f h ) ⊆ C , so f h ∈ K and thus f ∈ K . As g is itself b ounded and B ( Q n ) ⊴ Aut( Q n ), we ha v e K = B ( Q n ). (iii) : The argument is similar to (ii) . Let a ∈ C . As g is un bounded ab ov e we hav e [ a, ∞ ) ⊆ C . Let f ∈ L ( Q n ), and let a ′ ∈ Q n with supp( f ) ⊆ [ a ′ , ∞ ). Let h ∈ Aut( Q n ) with h ( a ) = a ′ . Then supp( f h ) ⊆ C ; the rest of the argumen t follows (ii) . The pro of of (iv) is likewise similar to (iii) . Note that for any g ∈ L ( Q n ) \ B ( Q n ), f ∈ R ( Q n ) \ B ( Q n ), the composition f g is unbounded, and so w e are done. □ Definition 5.10. Let a ∈ S ( n ). W e define the following subgroups of Aut( S ( n )) a : L a = { g ∈ Aut( S ( n )) a | ∀ k < n ∃ b k ∈ ⟨ a ↑ k , a ↑ k +1 ⟩ ∩ S ( n ) with ⟨ a ↑ k , b k ⟩ ∩ S ( n ) fixed p oint wise by g } ; R a = { g ∈ Aut( S ( n )) a | ∀ k < n ∃ b k ∈ ⟨ a ↑ k , a ↑ k +1 ⟩ ∩ S ( n ) with ⟨ b k , a ↑ k +1 ⟩ ∩ S ( n ) fixed p oint wise by g } ; B a = L a ∩ R a . Note that if g ∈ Aut( S ( n )) a fixes some ⟨ u, v ⟩ ∩ S ( n ) ⊆ ⟨ a, a ↑ 1 ⟩ p oint wise, then for all k < n , as S ( n ) ↑ k is dense in U , w e hav e that g fixes ⟨ u ↑ k , v ↑ k ⟩ ∩ S ( n ) p oint wise, and so L a , R a , B a can also b e describ ed in terms of ⟨ a, a ↑ 1 ⟩ alone: L a = { g ∈ Aut( S ( n )) a | ∃ b ∈ ⟨ a, a ↑ 1 ⟩ ∩ S ( n ) with ⟨ a, b ⟩ ∩ S ( n ) fixed p oint wise by g } ; R a = { g ∈ Aut( S ( n )) a | ∃ b ∈ ⟨ a, a ↑ 1 ⟩ ∩ S ( n ) with ⟨ b, a ↑ 1 ⟩ ∩ S ( n ) fixed p oint wise by g } . Lemma 5.11. F or e ach a ∈ S ( n ) , the non-trivial pr op er normal sub gr oups of Aut( S ( n )) a ar e L a , R a and B a . Pr o of. This is immediate b y Theorem 5.8 and Theorem 5.6 . □ Lemma 5.12. L et K ⊴ Aut( S ( n )) , K = 1 . L et a ∈ S ( n ) . Then K ∩ Aut( S ( n )) a = 1 . 13 Pr o of. T ake f ∈ K \ { id } . If f ∈ Aut( S ( n )) a , then the claim immediately follows. So supp ose f / ∈ Aut( S ( n )) a , and thus there is k < n with S k ( a, f ( a )). Hence S n − 1 − k ( f ( a ) , a ). By replacing f with f − 1 if necessary , w e ma y assume k ≤ n − 1 − k . As we cannot hav e S 0 ( a, f ( a )) ∧ S 0 ( f ( a ) , a ), w e therefore ha ve n − 1 − k > 0 and th us ¬ S 0 ( f ( a ) , a ). Let b ∈ S ( n ) with S 0 ( a, b ) ∧ S k ( b, f ( a )). Then S 0 ( f ( a ) , f ( b )), so { b, f ( b ) } ∩ { a, f ( a ) } = ∅ . If f ( b ) = b , then S 0 ( a, b ) ∧ S 0 ( f ( a ) , b ), which implies k = 0 and hence S 0 ( b, f ( a )), contradiction. So f ( b ) = b . T ake g ∈ Aut( S ( n )) suc h that g fixes eac h of a, f ( a ) , b but do es not fix f ( b ) (the existence of suc h g is straigh tfor- w ard b y ultrahomogeneity of S ( n ) and the fact that Age( S ( n )) has strong amalgamation). W e ha v e [ f , g ]( a ) = a , so [ f , g ] ∈ Aut( S ( n )) a . Also [ f , g ] = f − 1 f g ∈ K , and [ f , g ] = id as [ f , g ]( b ) = b . □ Lemma 5.13. L et K ⊴ Aut( S ( n )) , K = 1 . Then Aut( S ( n )) a ⊆ K for al l a ∈ S ( n ) . Pr o of. By Theorem 5.12 and Theorem 5.11 we hav e B a ⊆ K for each a ∈ S ( n ). Let a ∈ S ( n ) and let f ∈ L a . There is b ∈ ⟨ a, a ↑ 1 ⟩ ∩ S ( n ) such that f fixes ⟨ a, b ⟩ ∩ S ( n ) p oint wise. T ake c ∈ ⟨ a, b ⟩ ∩ S ( n ). Then f is the iden tity on ( ⟨ c, b ⟩ ∪ ⟨ a ↑ 1 , c ↑ 1 ⟩ ) ∩ S ( n ), so f ∈ B c and thus f ∈ K . So for all a ∈ S ( n ) we hav e L a ⊆ K , and b y an analogous argumen t we also hav e R a ⊆ K . So for all a ∈ S ( n ) we hav e K ∩ Aut( S ( n )) a ⊇ L a ∪ R a , and as K ∩ Aut( S ( n )) a ⊴ Aut( S ( n )) a , we therefore ha ve K ∩ Aut( S ( n )) a = Aut( S ( n )) a b y Theorem 5.11 . □ F act B. L et n ≥ 2 . The automorphism gr oup of the dense 2 π n -lo c al or der S ( n ) is simple. Pr o of. Let K ⊴ Aut( S ( n )), K = 1. Let f ∈ Aut( S ( n )) \ { id } be such that there exists a ∈ S ( n ) with S 0 ( a, f ( a )) ∨ S 0 ( f ( a ) , a ). Then there exists b ∈ S ( n ) with S 0 ( a, b ) ∧ S 0 ( f ( a ) , b ), and so by ultrahomogeneity of S ( n ) there exists g ∈ Aut( S ( n )) fixing b with g f ( a ) = a . Then g ∈ Aut( S ( n )) b and g f ∈ Aut( S ( n )) a , so b y Theorem 5.13 w e hav e g ∈ K and g f ∈ K , and th us f ∈ K . W e now sho w by induction on k < n that for all f ∈ Aut( S ( n )) \ { id } suc h that there exists a ∈ S ( n ) with S k ( a, f ( a )), we ha v e f ∈ K . This then immediately implies K = Aut( S ( n )). The case k = 0 has already b een shown. Supp ose k ≥ 1. If a ↑ k +1 = a , then S 0 ( f ( a ) , a ), and again we hav e already dealt with this case. Supp ose a ↑ k +1 = a . T ak e b ∈ S ( n ) with S 0 ( f ( a ) ↑ 1 , b ) ∧ S 0 ( b, a ↑ k +2 ), and write b = a ↑ k +2 e − iθ . T ake b ′ = a ↑ 2 e − iθ ′ ∈ S ( n ) with 0 < θ ′ < θ . Then S 1 ( f ( a ) , b ) ∧ S 1 ( a, b ′ ), and α ( b ′ , b ) = 2 π k n − θ + θ ′ , so S k − 1 ( b ′ , b ). By ultrahomogeneit y of S ( n ), there is g ∈ Aut( S ( n )) with g f ( a ) = a , g ( b ) = b ′ . By the induction h yp othesis, we ha v e g − 1 ∈ K . W e hav e g f ∈ Aut( S ( n )) a ⊆ K and th us f ∈ K , completing the induction. □ 6. Ul trahomogeneous oriented graphs W e now consider several countably infinite ultrahomogeneous orien ted graphs from Cherlin’s list [ Che98 ], de- termining the normal subgroups of their automorphism groups. (See also [ PS20 ], [ JLNVTW14 ] for further discussion of the orien ted graphs in this list.) W e show: Theorem C. R e c al l the fol lowing structur es fr om Cherlin ’s list: • ¨ S (2) : the double c over of the dense lo c al or der S (2) ; • D n : the generic n -p artite tournament; • F : the generic ω -p artite C 4 -tournament; • P (3) : the twiste d p artial or der. We have the fol lowing classific ation of the normal sub gr oups of the automorphism gr oups of these structur es: (i) the only non-trivial pr op er normal sub gr oup of Aut( ¨ S (2)) is the sub gr oup gener ate d by the involution sending e ach p oint to its antip o dal p oint ( 6.1 ); (ii) the normal sub gr oups of Aut( D n ) ar e pr e cisely { π − 1 ( K ) | K ⊴ Sym n } , wher e π is the map sending e ach automorphism to the bije ction it induc es on the set of lab els of the n p arts ( 6.2 ); (iii) the only non-trivial pr op er normal sub gr oup of Aut( F ) is gener ate d by the involution which, for e ach p art, swaps the p air of vertic es within it ( 6.3 ); (iv) Aut( P (3)) is simple ( 6.4 ). W e consider each structure o ccurring in Theorem C in a separate subsection of Section 6 , and so the pro of of Theorem C is split amongst these subsections. See [ KSW25 , Section 5] for a discussion of the SWIR expansions of the structures in Theorem C, whic h we shall not need to directly use, though these inspired the pro ofs in this section. The only structure not cov ered by [ KSW25 ] is P (3): see Theorem 6.19 . W e first establish some notation. 14 Notation 6.1. W e write L → = {→} for the language of oriented graphs. Let A b e an oriented graph (that is, the directed edge relation → is irreflexive and an tisymmetric). F or u, v ∈ A we write u ⊥ v if there is no edge betw een u, v in either direction, and w e write u ∼ v if there is an edge b etw een u, v in some direction. W e write ⊥ A for the relation on A defined by ⊥ : namely ⊥ A = { ( u, v ) ∈ A 2 | u ⊥ v } . Note that ⊥ A is reflexiv e and symmetric. F or U, V ⊆ A , we write U → V if u → v for all u ∈ U , v ∈ V , and we write U ∼ V if u ∼ v for all u ∈ U , v ∈ V . 6.1. The oriented graph ¨ S (2) . Recall the notation in Theorem 5.1 , which we use with n = 2. W e define an orien ted graph ¨ S (2) with domain dom( ‘ S (2)) = dom( S (2)) ∪ dom( S (2)) ↑ 1 as follo ws: for distinct u, v , we define u → v if α ( u, v ) < π . Note that for distinct u, v , we hav e u ⊥ v iff v = u ↑ 1 . (Also observe that ¨ S (2) ma y be alternativ ely defined by extending the oriented graph S (2) defined at the b eginning of Section 5 : we add the an tip o de v ↑ 1 of each vertex v ∈ S (2) and define directed edges as b efore using the an ticlo ckwise arcs.) The orien ted graph ¨ S (2) is denoted in [ Che98 ] by ˆ Q . Man y arguments will b e analogous to the case of S (2), and when there is no significant difference we only pro vide a sketc h. The oriented graph ¨ S (2) is ultrahomogeneous, as may b e seen similarly to Theorem 5.2 : the only change is that for A ⊆ fin ¨ S (2), we define the cuts of ˆ A to consist of the cuts ( u, u ′ ) as previously defined together with the elemen ts of A ↑ 1 \ A . F or a ∈ ¨ S (2), w e define J a to be the linear order with domain ⟨ a, a ↑ 1 ⟩ ∩ dom( ¨ S (2)) = { v ∈ ¨ S (2) | a → v } and with the order given by the directed edge relation → . It is immediate that J a ∼ = Q , and as in Theorem 5.6 we hav e an isomorphism Aut( ¨ S (2)) a → Aut( J a ), g 7→ g | J a . W e define L a , R a , B a as in Theorem 5.10 (fixing elemen ts of ¨ S (2) p oint wise), and by Theorem 5.8 these are the non-trivial prop er normal subgroups of Aut( ¨ S (2)) a . Let σ ∈ Aut( ¨ S (2)) b e the inv olution defined by σ ( v ) = v ↑ 1 , and let Σ = ⟨ σ ⟩ . It is straightforw ard to see that Σ ⊴ Aut( ¨ S (2)). The argument no w differs from that of Theorem 5.12 : Lemma 6.2. L et K ⊴ Aut( ¨ S (2)) , K = 1 , with K = Σ . Then for al l a ∈ ¨ S (2) we have K ∩ Aut( ¨ S (2)) a = 1 . Pr o of. Let f ∈ K \ Σ. Then there is v ∈ ¨ S (2) with f ( v ) / ∈ { v , v ↑ 1 } : if not, then as f = id there is u with f ( u ) = u ↑ 1 , so f has no fixed p oints and thus f = σ , contradiction. By taking f − 1 if necessary , w e ma y assume v → f ( v ). W e claim that there is w / ∈ { v , f ( v ) } with f ( w ) / ∈ { w , w ↑ 1 } : if there is u with v → u → f ( v ) and f ( u ) = u ↑ 1 , then taking w with w → v , w → f ( v ) we ha ve f ( w ) = w , and as w → v we ha ve f ( w ) → f ( v ) and thus f ( w ) = w ↑ 1 . If there is no such u , then tak e w with v → w → f ( v ), and we immediately hav e f ( w ) / ∈ { w , w ↑ 1 } . There is g ∈ Aut( ¨ S (2)) fixing each of v , f ( v ) , w and moving f ( w ); we then ha v e [ f , g ]( v ) = v , [ f , g ]( w ) = w and [ f , g ] ∈ K , so K ∩ Aut( ¨ S (2)) v = 1, and by conjugation we are done. □ F or K ⊴ Aut( ¨ S (2)), K / ∈ { 1 , Σ } , we ha v e Aut( ¨ S (2)) a ⊆ K for all a ∈ ¨ S (2), by the argumen t of Theorem 5.13 . Prop osition 6.3. The only non-trivial pr op er normal sub gr oup of Aut( ¨ S (2)) is Σ , the sub gr oup gener ate d by the involution σ : v 7→ v ↑ 1 . Pr o of. Let K ⊴ Aut( ¨ S (2)), K / ∈ { 1 , Σ } . W e hav e Aut( ¨ S (2)) a ⊆ K for all a ∈ ¨ S (2). Let f ∈ Aut( ¨ S (2)) \ Σ. By the same argument as in the pro of of Theorem 6.2 , there is v ∈ ¨ S (2) with f ( v ) / ∈ { v , v ↑ 1 } , and so there is u ∈ ¨ S (2) with u → v , u → f ( v ). Let g ∈ Aut( ¨ S (2)) with g u = u , g f v = v . Then g ∈ Aut( ¨ S (2)) u ⊆ K and g f ∈ Aut( ¨ S (2)) v ⊆ K , so f ∈ K . W e hav e f σ / ∈ Σ, so f σ ∈ K , and th us also σ ∈ K . Hence K = Aut( ¨ S (2)). □ 6.2. The generic n -partite tournamen t. Definition 6.4. Let n ∈ N ∪ { ω } with n ≥ 2. W e say that an oriented graph A is an n -p artite tournament if ⊥ A is an equiv alence relation with ≤ n equiv alence classes. W e call the equiv alence classes p arts . F or a ∈ A , w e write P a for the part con taining a , and for B ⊆ A we write P B = S a ∈ B P a . Definition 6.5. Let L → n = {→ , ( χ i ) i
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment