CARGO: Carbon-Aware Gossip Orchestration in Smart Shipping
Smart shipping operations increasingly depend on collaborative AI, yet the underlying data are generated across vessels with uneven connectivity, limited backhaul, and clear commercial sensitivity. In such settings, server-coordinated FL remains a we…
Authors: Alex, ros S. Kalafatelis, Nikolaos Nomikos
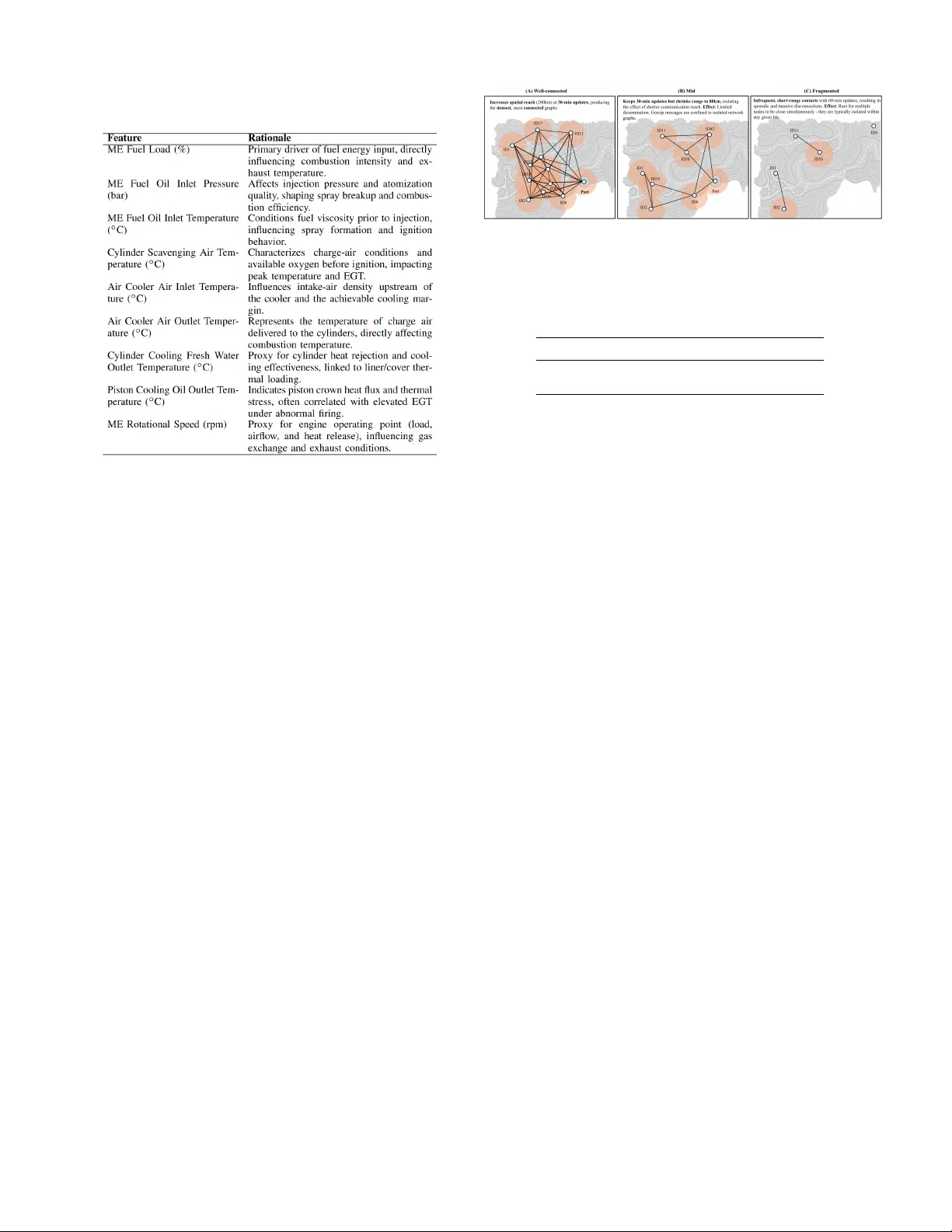
1 CARGO: Carbon-A ware Gossip Orchestration in Smart Shipping Alexandros S. Kalafatelis, Graduate Student Member , IEEE, Nikolaos Nomikos, Senior Member , IEEE, V asileios Nikolakakis, Nikolaos Tsoulakos, and Panagiotis T rakadas Abstract —Smart shipping operations increasingly depend on collaborative AI, yet the underlying data are generated across vessels with uneven connectivity , limited backhaul, and clear com- mercial sensitivity . In such settings, server -coordinated federated learning (FL) remains a weak systems assumption, depending on a reachable aggr egation point and repeated wide-area synchr o- nization, both of which are difficult to guarantee in maritime net- works. A serv erless gossip-based approach theref ore r epresents a more natural approach, but existing decentralized methods still treat communication mainly as an optimization bottleneck, rather than as a resour ce that must be managed jointly with carbon cost, reliability , and long-term participation balance. In this context, this paper pr esents CARGO, a carbon-aware gossip orchestration framework for smart-shipping deployment. CARGO separates learning into a control plane and a data plane. The data plane performs local optimization with compressed gossip exchange, while the control plane decides, at each round, which vessels should participate, which communication edges should be ac- tivated, how aggressi vely updates should be compressed, and when recov ery actions should be triggered. These decisions are guided by compact telemetry that combines predictive utility , carbon-related cost pr oxies, and participation-history signals. W e evaluate CARGO under a predictive-maintenance scenario using operational bulk-carrier engine data and a trace-driven maritime communication protocol that captures client dropout, partial participation, packet loss, and multiple connectivity regimes, derived fr om mobility-aware vessel interactions. Across the tested stress settings, CARGO consistently remains in the high-accuracy regime while reducing carbon footprint and communication ov er- heads, compared to accuracy-competitive decentralized baselines. Overall, the conducted perf ormance evaluation demonstrates that CARGO is a feasible and practical solution for reliable and resour ce-conscious maritime AI deployment. Index T erms —Artificial intelligence, energy management meth- ods, gossip learning, maritime transportation, predictiv e mainte- nance. I . I N T R O D U C T I ON M ARITIME transport underpins global trade, but its digi- talization and decarbonization agendas are no w increas- ingly intertwined. Shipping carries ov er 80% of world trade by volume, while the International Maritime Organization (IMO) has set progressiv ely stricter decarbonization ambitions, including at least a 40% reduction in carbon intensity by 2030 and net-zero greenhouse gas (GHG) emissions from international shipping by 2050 [1], [2]. In parallel, predictiv e maintenance (PdM) is becoming a critical capability for fleet operations, since failures in propulsion and auxiliary systems A. S. Kalafatelis, N. Nomikos, V . Nikolakakis, and P . Trakadas are with the Department of Ports Management and Shipping, National and Kapodistrian University of Athens, 34400 Euboea, Greece, Emails: { alexkalafat,nomikosn,vnikolak,ptrakadas } @uoa.gr . N. Tsoulakos is with Laskaridis Shipping Co. Ltd, 14562, Kifisia Greece, Email: tsoulakos@laskaridis.com . Manuscript received March 29, 2026. directly affect safety , schedule reliability , fuel consumption, and operating cost [3], [4]. For maritime PdM, therefore, it is no longer suf ficient to ask whether a learning system is accurate; one must also ask whether it can be deployed efficiently and robustly across vessels operating under diverse connectivity and resource conditions [5]–[7]. These deployment constraints are particularly acute at fleet scale. V essel data are naturally distrib uted, wide-area commu- nication is heterogeneous and often intermittent, and reliance on a shore-side coordinator is not always possible in real ship- ping operations. This makes decentralized, serverless training especially attracti ve. Classical server -coordinated federated learning (FL) has been highly successful in terrestrial edge settings, yet its star topology depends on a reliably connected aggregation point. In contrast, gossip-style decentralized learn- ing can exploit the peer-to-peer structure of opportunistic maritime contacts and continue training without requiring ev ery round to terminate at a central server [8]–[11]. F or smart- shipping deployment, this is a system-level design choice rather than a minor implementation detail. Howe ver , existing decentralized methods are still insuffi- cient for this setting. Canonical methods, such as decentralized parallel stochastic gradient descent (D-PSGD) and stochastic gradient push (SGP) focus on consensus and con ver gence over a communication graph, but they do not explicitly decide which vessels should participate, which links should be used, or when communication should be curtailed or reinforced un- der operational conditions [12], [13]. Communication-efficient variants reduce payload size through compression, and sparse- gossip methods reduce the number of exchanged peers [14], [15]. Y et these methods still treat communication primarily as a bandwidth or optimization issue. As a consequence, they do not jointly account for predicti ve utility , time-varying carbon conditions, long-term participation balance, and packet losses, lev eraging robust control mechanisms. For maritime PdM, that omission matters, as a method that reaches strong accuracy only through dense synchronization, repeated use of the same fa vorable vessels, or communication under carbon-intensive conditions is difficult to employ under real operational condi- tions. Considering current shortcomings in collaborativ e AI-based smart shipping, this paper presents CARGO, a carbon- aware gossip orchestration frame work for decentralized smart- shipping deployment. CARGO separates learning into a con- trol plane and a decentralized data plane. The data plane retains standard local optimization with compressed gossip exchange, while the control plane decides at each round which vessels should participate, which communication edges should be activ ated, how aggressi vely updates should be compressed, and when reliability actions, such as resynchronization should 2 be triggered. These decisions are guided by a compact teleme- try interface that combines utility-related signals, carbon- and energy-related signals, and participation history signals. In this way , CARGO turns decentralized learning from a fixed communication routine into an online orchestration problem tailored to the decentralized nature of maritime operation. The main contributions of this paper are as follows: 1) W e formulate decentralized maritime operations un- der intermittent connectivity , as an online orchestration problem over a time-varying communication graph, cou- pling predictive utility , carbon-aw are resource use, and participation-aware control. 2) Then, CARGO, a control-plane/data-plane architecture is introduced, jointly scheduling node participation, edge activ ation, communication compression, and recovery actions for compressed gossip learning under maritime operating constraints. 3) A trace-driven v alidation protocol for smart-shipping learning is dev eloped, capturing client-av ailability dropout, partial participation, packet loss, and multiple connectivity re gimes derived from mobility-a ware vessel interaction patterns with port context. 4) An empirical ev aluation on operational bulk-carrier en- gine data under trace-driv en maritime communication stress is presented, sho wing that CARGO maintains competitiv e predicti ve quality while reducing carbon and communication overheads over accuracy-dri ven decen- tralized baselines. The rest of the paper is organized as follows. Section II revie ws related work and positions CARGO with respect to decentralized learning, communication-efficient optimization, carbon-aware systems, and maritime AI. Section III presents the system model and formal problem formulation. Section IV describes the CARGO orchestration framework and its round- wise control policy . Section V details the experimental setup, including the maritime validation protocol and baseline meth- ods. Section VI reports the empirical results, and Section VII concludes the paper . I I . R E L A T E D W O R K This section discusses the current state-of-the-art in areas relev ant to our study , identifying current shortcomings that we aim to address through the proposed CARGO frame work. W e organize the discussion around fi ve themes, i.e., decen- tralized and gossip-based learning, communication-efficient and reliability-aware distributed learning, carbon- and energy- aware ML systems, AI for smart ships and maritime predictive maintenance, and the resulting gap that motiv ates CARGO. The central point is that CARGO is not introduced as another generic optimizer v ariant but as a smart-shipping orchestration method, where communication intermittency , carbon-aware operation, and participation control must be handled jointly . A. Decentralized and Gossip-Based F ederated Learning FL has been a popular decentralized learning approach due to its priv acy-preserving characteristics. In this context, server -coordinated FL is commonly traced to FedA vg, where clients perform local training and a central server periodically aggregates model updates [8]. This architecture has been highly successful in terrestrial edge settings, but its direct transfer to maritime operations is not straightforward. In fleet- scale shipping, communication conditions vary , leading to often intermittent connecti vity with shore-side or cloud-based coordinator nodes [9], [10], [16]. For this reason, the more relev ant methodological neighborhood for the present paper is serverless decentralized learning, and in particular gossip- based learning [11], [17]. Classical decentralized optimization provides the main starting point for serverless decentralized learning. Here, D-PSGD replaces centralized aggregation with neighbor-to- neighbor model mixing over a communication graph and shows that decentralized training can remain competiti ve with centralized parallel SGD [12]. SGP extends this approach to directed or asymmetric communication through push-sum style mixing [13]. CHOCO-type methods reduce payload cost through compressed communication and error-compensated gossip while preserving con ver gence guarantees [14]. These methods are central baselines for CARGO because they define the standard decentralized learning substrate on top of which orchestration can act. A second line studies sparser peer-to-peer information exchange. GossipFL reduces communication by combining decentralization with adaptive sparse communication [15]. More broadly , Heged ˝ us et al. explicitly frame gossip learning as a decentralized alternativ e to federated learning, showing that serverless peer-to-peer learning can be competiti ve with server -based FL in dynamic en vironments [11]. A recent work by T undo et al. further strengthens this perspective in edge settings, where gossip learning is used to improv e robustness, reduce communication ov erheads, and tolerate failures in geographically distributed en vironments [18]. These works support the architectural choice made in CARGO, i.e., for a maritime en vironment characterized by opportunistic contacts and unreliable wide-area connecti vity , serverless peer exchange is not an implementation detail, but a system-level design decision. These works hav e two important gaps. First, existing de- centralized and gossip-based methods are primarily optimizer- centric, i.e., they specify how models should be mixed, but rarely treat node participation, link acti vation, and compression as a joint control problem. Second, they are generally unaware of carbon intensity as a scheduling signal. These are precisely the areas where CARGO departs from the current state-of-the- art. B. Communication-Efficient and Reliability-A ware Distrib uted Learning A large body of work treats communication as the principal bottleneck in distributed learning. One direction reduces pay- load size through quantization and sparsification. Quantized SGD (QSGD) introduces quantized gradient exchange with prov able communication savings [19]. Sparsified SGD with memory shows that aggressi ve sparsification can remain effec- tiv e when accompanied by residual accumulation [20]. Next, error-feedback methods generalize this principle by showing that biased compressors can recover the behavior of full- 3 precision SGD when dropped information is explicitly rein- jected [21]. In decentralized settings, CHOCO-type methods integrate these ideas into compressed gossip updates [14]. Another line of research addresses imperfect communi- cation where time-v arying graphs, packet loss, and partial message delivery affect decentralized con vergence. Here, such effects can be analyzed at the topology/mixing lev el, while another approach would be to modify the optimizer more explicitly . Soft-DSGD is representati ve here, as it models un- reliable decentralized communication, adapting the update to partially received messages and link reliability estimates [22]. This is an important step to wards practical deployment, but its focus remains on robust decentralized optimization rather than on a broader orchestration policy . What remains underdev eloped in this domain is the joint treatment of the operational decisions that matter in a smart- shipping scenario, i.e., who participates, which feasible links are used, ho w aggressively updates are compressed, and when recov ery actions should be triggered. In this area, CARGO goes above current solutions, usually optimizing one or two of these dimensions at a time, treating them instead as coupled control variables within a single round decision process. C. Carbon- and Energy-A war e ML Systems The need to ev aluate machine learning systems beyond predictiv e accuracy is now well-established. Green AI argues that computational cost should be treated as a first-class ev aluation axis rather than as an afterthought [23]. Henderson et al. similarly advocate systematic reporting of energy and carbon footprints so that learning systems can be compared not only by accuracy , but also by their en vironmental cost [24]. These works provide the broader methodological basis for treating sustainability as part of the learning problem. W ithin distributed learning, recent works have moved from general advocacy to explicit footprint modeling. Sav azzi et al. analyze the energy and carbon footprints of centralized learning, server-based FL, and consensus-driv en decentralized learning, and show that communication efficiency strongly affects whether distributed training is environmentally prefer- able [25]. Guerra et al. compare server -based FL, gossip-style FL, and blockchain-enabled FL in terms of accuracy , commu- nication overheads, conv ergence time, and energy cost [26]. On the algorithmic side, energy-aw are client selection and carbon-aware FL configuration ha ve begun to appear in server - coordinated FL, including GREED and Green FL [27], [28], while on the gossip-side, optimized gossip learning (OGL) adapts local training effort, i.e., epochs and exchange be- havior to reduce ener gy consumption [29]. Howe ver , OGL remains energy-a ware rather than carbon-aware, using an infrastructure-assisted orchestrator , and does not address par- ticipation fairness and unreliable communication. This distinc- tion is important for positioning CARGO, since to the best of our knowledge, no prior gossip-learning works e xist, combin- ing carbon-aw are scheduling, fairness control, and pack et-loss- aware maritime deployment. D. AI for Smart Ships and Maritime Pr edictive Maintenance The maritime domain is not merely an application backdrop; it changes the systems assumptions. Maritime communica- tions span coastal terrestrial links, satellite backhaul, and opportunistic ship-to-ship connectivity , and are therefore far more heterogeneous than the connectivity model commonly assumed in terrestrial edge learning [9], [10]. This makes always-on centralized coordination a comparati vely weak sys- tems assumption for fleet-scale analytics. On the application side, recent maritime FL studies hav e established that collaborativ e learning is relev ant for smart- shipping use cases, such as fuel consumption modeling, just- in-time arriv al, and predictiv e maintenance [30], [31]. At the same time, maritime PdM surveys emphasize that propulsion and auxiliary systems are high-value targets for AI-based monitoring, but also highlight the scarcity of openly av ailable datasets and the need for architectures that can be deployed under real communication and systems constraints [32], [33]. This is a major area for CARGO, supporting PdM with a nov el deployment method, i.e., a carbon-aw are decentralized orchestration layer over a gossip-style learning substrate. Importantly , current FL studies remain predominantly server -coordinated and application-focused. T o the best of our knowledge, there are no prior works on gossip-based maritime PdM, jointly addressing decentralized gossip learning, carbon- aware communication control, reliability stress, and fairness- aware participation. E. State-of-the-Art Summary and CARGO P ositioning Stemming from the previous discussion of relev ant works T able I summarizes representativ e methods along the design dimensions that are most relev ant to this paper . This initial comparison highlights the dimensions that are supported by CARGO towards enabling a novel collaborativ e AI framework for smart-shipping. T able I leads to two conclusions. First, the characteristics that CARGO leverages have been separately studied in previ- ous works, i.e., decentralized mixing, compression, sparse peer exchange, fairness-aware learning, reliability-aware communi- cation, and energy/carbon-a ware scheduling. Second, none of the representati ve methods abov e jointly addresses them within one unified control framework, thus highlighting the gap that we aim to fill via CARGO. I I I . S Y S T E M M O D E L A N D P R O BL E M F O R M U L AT I O N A. Deployment Setting and System Assumptions W e consider a smart-shipping decentralized learning system with N vessels, indexed by V = { 1 , . . . , N } . Each vessel i ∈ V stores a local dataset D i and maintains a parameter vector x i ( t ) ∈ R P at communication round t . Communication is constrained by a time-varying graph G t = V , E cand t ) , (1) where E cand t is induced by the trajectory-deriv ed maritime communication topology . T raining proceeds in synchronized rounds where at each round, a subset of vessels performs local optimization and exchanges model information o ver a subset of feasible communication links. The system is subject to three operational constraints. First, connectivity is intermittent, so the feasible neighborhood of a vessel changes ov er time. Second, av ailability is stochastic, in the sense that a vessel in the current topology may still 4 T ABLE I P O SI T I O NI N G O F RE P R E SE N TA T I V E M E T HO D S AG A I NS T T H E M A I N D E S IG N D I ME N S I ON S TA RG E T E D B Y C A R G O. Method Central Peer -to-peer Payload Carbon / energy Unreliable-link Sparse peer Smart-ship coordinator decentralization compr ession aware scheduling handling / recovery communication target FedA vg [8] ✓ – – – – – – D-PSGD [12] – ✓ – – – – – SGP [13] – ✓ – – – – – CHOCO-SGD [14] – ✓ ✓ – – – – GossipFL [15] – ✓ ✓ – – ✓ – Soft-DSGD [22] – ✓ – – ✓ – – q-FFL / q-FedA vg [34] ✓ – – – – – – GREED [27] ✓ – – ✓ – – – GreenFL [28] ✓ – – ✓ – – – OGL [29] – ✓ – ✓ – – – GL for Edge Forecasting [18] – ✓ – – ✓ – – FL for Green Shipping [31] ✓ – – – – – ✓ CARGO (ours) – ✓ ✓ ✓ ✓ ✓ ✓ be unav ailable because of local workload, energy constraints, or operational disruption. Third, communication is imperfect, a link that is feasible at decision time may still experience packet loss during the actual e xchange, so the deli vered com- munication graph can be a strict subset of the graph that was activ ated by the controller . Before each round, the controller , treated here as a logical scheduling module rather than as a parameter server , has access to a lightweight telemetry summary derived from the previous learning state and the current system context. B. Control and Data Plane Separation CARGO is organized as a control plane operating over a decentralized-learning data plane. The data plane follows the standard pattern of local stochastic optimization with neighbor mixing used in decentralized SGD and push-sum style distributed training [12], [13]. The control plane does not alter the predictor architecture or the local optimizer . Instead, it decides which vessels participate, which links are activ ated, how exchanged messages are compressed, and how mixing weights are assigned. This separation is a central ar- chitectural property of CARGO, preserving compatibility with established decentralized learning updates while exposing an explicit orchestration layer that accounts for carbon intensity , participation fairness, and communication conditions. C. Round Interface and T elemetry Here, we provide details on the necessary interface and telemetry , required at each round. Let a i ( t ) ∈ { 0 , 1 } denote the av ailability indicator of vessel i at round t , and let Ω t = { i ∈ V : a i ( t ) = 1 } (2) be the available-node set. When a participation fraction f ∈ (0 , 1] is enforced, the target number of active vessels is K t = min ⌈ f N ⌉ , | Ω t | (3) For each vessel i , the control plane observes the telemetry vector z i ( t ) = ℓ i ( t ) , δ i ( t ) , s i ( t ) , ρ i ( t ) , χ i ( t ) , (4) where ℓ i ( t ) is the latest local loss, δ i ( t ) is a disagreement- related local-state signal, s i ( t ) is the inactivity streak, ρ i ( t ) is the participation rate ov er a sliding window , and χ i ( t ) is the carbon intensity in gCO 2 /kWh. The candidate neighbor set of node i is denoted by N i ( t ) = { j : ( i, j ) ∈ E cand t } . At round t , the control plane emits the decision b undle D t = A t , E t , W t , C t , r t , (5) where A t ⊆ Ω t is the active-node set, E t ⊆ E cand t is the ac- tiv ated edge set, W t = [ w ij ( t )] is the mixing matrix, C t is the compression policy , and r t ∈ { 0 , 1 } is the resynchronization flag. D. Optimization Objective CARGO balances three competing goals at each round, i.e., selecting informativ e vessels for learning, limiting the carbon cost of computation and communication, and prev enting sys- tematic exclusion of particular vessels. W e write the controller objectiv e in the following generic form max D t U t ( D t ) − λ C ( t ) C cost t ( D t ) − λ F ( t ) F t ( D t ) , (6) where U t denotes aggregate learning utility , C cost t denotes the carbon-related cost proxy , and F t denotes the fairness penalty . The nonnegati ve multipliers λ C ( t ) and λ F ( t ) regu- late the trade-off between predictive progress, sustainability , and participation balance. The feasible set is defined by the operational constraints of the current round, i.e., only av ailable vessels may be activ ated, only feasible topology edges may be selected, the communication degree budget must be respected, and the mixing matrix must remain stochastic on the activ ated communication graph. Packet loss does not alter the control decision itself, but affects the deliv ered graph used by the data plane. E. Problem Statement The ov erall problem is to design a sequential control policy Π that maps the current topology , telemetry , and model state to a feasible round decision Π : G t , { z i ( t ) } N i =1 , { x i ( t ) } N i =1 7→ D t , (7) so as to improv e the final predictive performance while controlling cumulativ e carbon expenditure and maintaining participation fairness over the training horizon. Formally , we 5 Fig. 1. CARGO control plane. The CARGO Or chestrator combines utility , carbon, and fairness signals to compute per -node scores { g i ( t ) } i ∈ Ω t over the available set. These scores driv e the P articipation Scheduler , while the T opology Scheduler , Carbon-A ware Compr essor , and Gossip Mixer determine the activ ated graph E t , compression policy C t , and mixing matrix W t , respectiv ely . The controller output at round t is the decision bundle D t = ( A t , E t , W t , C t , r t ) , where r t denotes the resynchronization flag. seek a policy that minimizes terminal v alidation loss, subject to budget and feasibility constraints min Π E [ L ( ¯ x ( T ))] (8) s.t. T X t =1 C tot ( t ) ≤ B C , (9) D t is feasible for all t = 1 , . . . , T (10) Here, ¯ x ( T ) denotes the final consensus (or av erage) model, L ( · ) is the v alidation loss, and B C is a cumulati ve carbon budget. Because this problem is sequential, graph-coupled, and combinatorial, CARGO solves it approximately through a round-wise primal-dual control policy . I V . C A R G O O R C H E S T R A T I O N F R A M E W O R K A. CARGO Overview Below , we provide the overvie w and control logic of the CARGO frame work, clarifying how utility , carbon, and fair- ness signals are integrated to orchestrate node participation, topology formation, and communication efficienc y . Fig. 1 summarizes the CARGO control plane. At the beginning of each round, the CARGO Orchestrator receiv es the current topology context, per-node telemetry , the carbon/energy proxy parameters, and the current dual state. It combines the utility , carbon, and fairness components to produce the per-a vailable- node score set { g i ( t ) } i ∈ Ω t . These scores are consumed by the Participation Scheduler to determine the activ e-node set A t . In parallel, the T opology Scheduler filters candidate links and selects a degree-bounded activ ated graph E t , the Carbon- A w are Compressor assigns the communication mode for acti ve senders, and the Gossip Mixer constructs the corresponding mixing matrix W t . The resulting controller output is the round decision bundle D t = ( A t , E t , W t , C t , r t ) , which is then consumed by the decentralized data plane. B. P articipation Scheduler This subsection introduces the participation scheduling mechanism, determining the set of acti ve nodes at each round by balancing utility , carbon cost, and fairness through adaptive scoring and thresholds. The Participation Scheduler operates on the per-node scores produced by the CARGO Orchestrator . For vessel i at round t , the utility term is U i ( t ) = 1 1 + ℓ i ( t ) + δ i ( t ) , (11) which increases when the vessel remains informative for optimization or consensus. The scheduler estimates the per-round carbon burden of activ ating node i through a compute-side term and a communication-side term. Let F ( t ) denote the estimated workload in FLOPs, τ i the device throughput, and P act i the activ e power . The compute-side proxy is C i, cmp ( t ) = F ( t ) τ i P act i χ i ( t ) 3 . 6 × 10 6 (12) For communication, the transmitted-byte proxy is giv en inline by B i, tx ( t ) = B θ ϱ i ( t ) d max , where B θ is the dense model size, ϱ i ( t ) is the compression ratio, and d max is the commu- nication f anout cap. This induces a communication-side carbon term C i, com ( t ) , and the total proxy is Γ i ( t ) = C i, cmp ( t ) + C i, com ( t ) (13) T o av oid chronic exclusion, the scheduler introduces a fairness penalty Φ i ( t ) = s i ( t ) − S max + 1 + + ρ ⋆ − ρ i ( t ) + , (14) where S max is the maximum tolerated inacti vity streak and ρ ⋆ is the minimum target participation rate. The resulting score passed from the CARGO Orchestrator to the Participation Scheduler is g i ( t ) = U i ( t ) − λ C ( t )Γ i ( t ) − λ F ( t )Φ i ( t ) (15) The initial activ e set is formed through robust thresholding: ϑ t = median { g j ( t ) : j ∈ Ω t } + β , (16) A (0) t = { i ∈ Ω t : g i ( t ) > ϑ t } (17) 6 Fig. 2. Round-level scheduling view . Starting from the av ailable-node set Ω t and the candidate edge set E cand t induced by the current topology snapshot, CARGO first selects the active-node set A t ⊆ Ω t and then activates a degree- bounded communication subgraph E t ⊆ E cand t . Any vessel with inactivity streak at least S max is then forced into the active set: F t = { i ∈ Ω t : s i ( t ) ≥ S max } , A t ← A (0) t ∪ F t (18) If the target cardinality in (3) is not met, the set is filled or trimmed using a secondary ef ficiency ratio based on utility per unit carbon proxy . C. T opology Scheduler , Carbon-A war e Compr essor , and Gos- sip Mixer This subsection includes details on the coordinated design of topology selection, communication compression and de- centralized aggregation, enabling efficient and carbon-aware information exchange across active vessels. a) T opology Scheduler: For each acti ve node i ∈ A t , the candidate communication set is S i ( t ) = N i ( t ) ∩ A t . The T opology Scheduler ranks feasible edges according to an informativ eness-to-cost ratio, ψ ij ( t ) = | ν i ( t ) − ν j ( t ) | κ ij ( t ) + ε , (19) where ν i ( t ) denotes the current node-lev el influence signal used for edge ranking and κ ij ( t ) denotes the communication- side carbon-cost proxy associated with activ ating edge ( i, j ) . Each acti ve node keeps at most d max neighbors with largest ψ ij ( t ) , yielding a degree-bounded acti vated graph E t . Fig. 2 illustrates the distinction between the a vailable-node set, the candidate topology edges, and the final activ ated subgraph used by the controller . b) Carbon-A ware Compressor: The Carbon-A w are Com- pressor selects the payload representation according to the sender’ s carbon intensity . Let χ L and χ H denote the low- and high-intensity thresholds, then C t ( i ) = None , χ i ( t ) < χ L , INT8 , χ L ≤ χ i ( t ) < χ H , T op- K, χ i ( t ) ≥ χ H (20) where None denotes no compression, i.e., dense transmission. c) Gossip Mixer: Given the activ ated graph E t , the Gos- sip Mixer constructs a row-stochastic matrix using Metropolis weights, a standard local rule in distributed averaging and gossip-style consensus [35], [36]: w ij ( t ) = 1 1 + max { deg i ( t ) , deg j ( t ) } , ( i, j ) ∈ E t , i = j , 1 − X j = i w ij ( t ) , i = j, 0 , otherwise (21) D. Data-Plane Update W ith Compressed Gossip Here, details are given regarding the data-plane update process, where compressed gossip-based exchanges are used to propagate model updates while mitigating communication ov erheads and ensuring con vergence. Let h i ( t ) ∈ R P denote the local memory variable used for error compensation. For each active vessel i ∈ A t , local training first produces an intermediate iterate e x i ( t ) . The compressed-gossip step then proceeds as e i ( t ) = e x i ( t ) − h i ( t ) , (22) b e i ( t ) = Q i ( t )( e i ( t )) , (23) h i ( t + 1) = h i ( t ) + b e i ( t ) (24) where Q i ( t ) is the compression operator induced by (20). Packet loss determines the deli vered-edge mixing matrix f W t = [ e w ij ( t )] , obtained from the acti vated matrix W t = [ w ij ( t )] through e w ij ( t ) = w ij ( t ) m ij ( t ) P N k =1 w ik ( t ) m ik ( t ) , (25) whenev er the denominator is nonzero. Otherwise, node i retains full self-weight, i.e., e w ii ( t ) = 1 and e w ij ( t ) = 0 for j = i . Using f W t , the mixed-memory state is ¯ h i ( t + 1) = N X j =1 e w ij ( t ) h j ( t + 1) , (26) and the model update is x i ( t + 1) = e x i ( t ) + γ ¯ h i ( t + 1) − h i ( t + 1) , (27) where γ is the gossip step size and f W t is the deliv ered- edge mixing matrix defined in (25). This update follows the error-feedback principle of compressed decentralized op- timization [14], [21]. Nodes not in A t keep both state and memory unchanged. 7 E. Reliability and Resynchr onization This part clarifies the impact of unreliable communications, introducing mechanisms to handle packet loss and main- tain system stability through proper resynchronization. More specifically , packet loss acts on attempted transmissions and induces a delivered graph that is generally sparser than the activ ated graph selected by the controller . Let m ij ( t ) ∈ { 0 , 1 } denote the delivery indicator on link ( i, j ) . The delivered-edge mixing matrix f W t is defined in (25) and is used directly in the compressed-gossip update. The empirical effecti ve loss ov er a run is reported as p eff = 1 − P t B del ( t ) P t B att ( t ) , (28) where B att ( t ) and B del ( t ) denote attempted and deli vered bytes, respecti vely . T o reduce drift under communication impairment, CARGO exposes resynchronization through the flag r t in (5). In the reported experiments, resynchronization follows a fixed periodic rule, r t = ( 1 , t mo d R = 0 , 0 , otherwise (29) where R denotes the resynchronization interval in rounds. The value of R is set by the runtime preset and remains fix ed within each experiment family . F . Dual Updates Finally , this subsection presents the update rules for the dual variables, dynamically regulating carbon budget and fairness constraints. The CARGO Orchestrator updates the adapti ve multipliers λ C ( t ) and λ F ( t ) using projected subgradient steps. Let C 1: t = t X τ =1 C tot ( τ ) (30) denote cumulativ e carbon and B C the nominal carbon budget. The normalized carbon gap is g C ( t ) = C 1: t − B C B C + ε (31) Similarly , with av erage participation ¯ ρ ( t ) = 1 N P N i =1 ρ i ( t ) , the fairness gap is g F ( t ) = ρ ⋆ − ¯ ρ ( t ) + (32) The dual updates are λ C ( t + 1) = λ C ( t ) + η C g C ( t ) + , (33) λ F ( t + 1) = λ F ( t ) + η F g F ( t ) + (34) V . E X P E R I M E N TA L S E T U P In this section, we describe the experimental setup and implementation details used to ev aluate CARGO. More specif- ically , all experiments were executed on a local workstation featuring an Intel ® Core™ Ultra i9-275HX CPU (2.7 GHz), 32 GB RAM, a 64-bit operating system, and an NVIDIA GeForce R TX 5070 GPU. The experimental pipeline was im- plemented in Python 3.12.3 using PyT orch 2.9.1 (CUD A 12.8). T raining and ev aluation were GPU-accelerated via CUDA Algorithm 1 CARGO at round t Input: Ω t , G t , { z i ( t ) } N i =1 , { x i ( t ) , h i ( t ) } N i =1 , λ C ( t ) , λ F ( t ) Output: D t , { x i ( t + 1) , h i ( t + 1) } N i =1 , λ C ( t + 1) , λ F ( t + 1) 1: for all i ∈ Ω t do 2: Compute U i ( t ) , Γ i ( t ) , Φ i ( t ) , and g i ( t ) using (11)-(15) 3: end for 4: Form A t using (16)–(18) and cardinality correction 5: for all i ∈ A t do 6: Select up to d max neighbors in N i ( t ) ∩ A t using (19) 7: Assign compression mode C t ( i ) by (20) 8: end for 9: Construct E t and W t using (21); set r t 10: for all i ∈ A t do 11: Compute e x i ( t ) by local SGD 12: Compute e i ( t ) , b e i ( t ) , and h i ( t + 1) via (22)-(24) 13: end for 14: Construct f W t from W t and the realized delivery mask using (25) 15: for all i ∈ A t do 16: Compute ¯ h i ( t + 1) and x i ( t + 1) via (26)-(27) 17: end for 18: for all i / ∈ A t do 19: x i ( t + 1) ← x i ( t ) and h i ( t + 1) ← h i ( t ) 20: end for 21: if r t = 1 then 22: perform resynchronization over delivered links 23: end if 24: Update λ C ( t + 1) and λ F ( t + 1) using (33)-(34) (cuDNN 9.10.2). All decentralized e xperiments were run with identical software and measurement settings across all meth- ods to ensure a consistent comparison. A. Data, Pr epr ocessing, F eatur e Engineering , and PdM Model 1) Dataset Description: W e ev aluate CARGO using opera- tional data from a bulk carrier operated by Laskaridis Shipping Ltd., collected from a two-stroke Main Engine (ME) rated at 12,009 HP and previously analyzed in [37]. The dataset con- tains 59,619 high-frequency time-series observ ations acquired from 759 shipboard sensor channels. The learning target is the cylinder-le vel exhaust gas temperature (EGT), a routinely monitored variable in marine PdM that reflects the engine’ s thermal balance and combustion condition, being widely used for early detection of abnormal firing, injection faults, and heat-transfer degradation [38]–[41]. 2) Prepr ocessing, F eatur e Selection & Engineering: T o prev ent temporal leakage, we apply a contiguous 80/20 train/test split before an y scaling, windowing, or feature ranking. Missing predictor values are imputed via forward fill followed by backward fill, while samples with missing target EGT are remov ed. Feature selection is performed on the training split only . In this context, we retain numeric predictors, exclude the target, and rank candidates by absolute Pearson correlation ( s j = | corr( x j , y ) | ), keeping the top- 9 variables (T able II). Then, we augment the selected predictors with lightweight temporal structure, i.e., a one-step target lag y t − 1 and, for each selected x j , the first dif ference ∆ x j,t = x j,t − x j,t − 1 , as well as a 12-sample rolling mean ¯ x (12) j,t . Also, a relativ e time index is included, while rows that are undefined by lagging/dif ferencing are dropped. Predictors and target are standardized with separate StandardScaler transforms fitted on the training split and applied to the test split. Furthermore, supervised samples are formed with sliding windows of length W and horizon H , based on X t = { x t , . . . , x t + W − 1 } , y t = y t + W + H − 1 , where unless stated otherwise, W =30 and H =1 was set, yielding a compact multiv ariate sequence per timestep consisting of the selected raw variables, their dif ferenced and 8 T ABLE II C O RE E N G I NE V A R I AB L E S U S E D F O R M E C Y LI N D E R E G T F O R E CA S T I NG . smoothed counterparts, the lagged target, and the relati ve time index. 3) PdM Model: T o wards ensuring a fair comparison, all decentralized experiments use the same PdM model, imple- mented as a sequence-to-one long short-term memory (LSTM) regressor . The backbone is a tw o-layer LSTM with dropout 0 . 1 between recurrent layers and hidden size h =128 , selected via a small sweep o ver h ∈ { 64 , 128 , 256 } . The output is con verted to a single-step EGT forecast, using a compact two-layer multilayer perceptron (MLP) head, i.e., a linear projection that halves the hidden dimensionality ( h → h/ 2 ), a ReLU nonlinearity , and a final linear layer that maps to one scalar output ( h/ 2 → 1 ). The model is trained by minimizing mean squared error (MSE) between the predicted and ground-truth EGT values, computed in the standardized target space. B. Decentralized V alidation Pr otocol, T opolo gy Re gimes, and Baselines 1) Decentralized Maritime V alidation Pr otocol: W e e val- uate CARGO in a decentralized PdM setting where each vessel acts as a client holding local time-series data and exchanging model updates over an intermittently connected maritime network. Client-side instability is modeled through an a vailability dropout probability p d , which removes a client from a gi ven round, and a participation fraction f , which sub- samples from the available clients. Communication unreliabil- ity is modeled through an independent packet-loss probability p applied to attempted transmissions. This protocol is intended to reflect the coverage gaps, link heterogeneity , and intermit- tent contact opportunities, being representative of maritime communications [9], [10]. T o av oid toy graph families while retaining experimental control, we construct AIS-style vessel trajectories with explicit port calls and derive time-varying contact graphs from vessel positions. Unless otherwise stated, we place N =5 vessels and P =6 ports within a 300 km region, centered at (37 . 0 , − 122 . 0) and simulate 48 base steps at 30- min resolution. Each vessel alternates between an in-port dwell Fig. 3. V isualization of maritime gossip topologies across three regimes: (A) W ell-connected, (B) mid, and (C) fragmented. T ABLE III C O NN E C T IV I T Y S TA T I S T IC S F O R T H E T H R EE T O P OL O G Y R E G IM E S . Regime ∆ t d max Conn. Med. LCR (min) (km) (cnt/rate) comps (mean) W ell-connected 30 200 92/144 (0.639) 1 0.883 Mid 30 80 8/144 (0.056) 2 0.692 Fragmented 60 80 5/72 (0.069) 2 0.686 phase (truncated Normal: mean 4 steps, std 1, minimum 1) and an underway phase towards a uniformly sampled destination port. Underway transit time is computed from great-circle distance and a service-speed draw centered around typical cruising values (mean 28 km/h, std 6, truncated to ≥ 5 km/h). T o reflect reporting irregularity and missingness commonly ob- served in operational AIS feeds, we inject state-dependent gaps (in port versus at sea) and apply conservati ve gap-bridging during topology construction [42]. Connectivity is represented as a sequence of snapshot graphs with bin duration ∆ t . In snapshot t , an undirected edge ( i, j ) is activ e if d ij ( t ) ≤ d max , where d ij is the haversine distance. V essels co-located at the same port are additionally connected as a dense local subgraph to represent near-shore/local infrastructure connecti vity . Brief reporting gaps are handled by hold-last-position for up to one missing bin, without positional jitter . W e ev aluate three connectivity regimes: (i) well-connected (30 min , 200 km) , (ii) mid (30 min , 80 km) , and (iii) fragmented (60 min , 80 km) . The transition well-connected → mid isolates reduced spatial reach at fixed temporal resolution, while mid → fragmented isolates reduced contact opportunities induced by coarser snapshotting at fixed range. Fig. 3 visualizes the regimes, and T able III reports the corresponding connecti vity statistics. These values are used to verify regime separation rather than hypothesis tests. 2) Device Pr ofile: All clients are assigned the same low- power edge-device profile in the accounting model, so that differences in ener gy , carbon, and communication arise from the learning/control policy and network conditions rather than from heterogeneous hardware. In addition, we use a homo- geneous edge profile representativ e of resource-constrained deployments often considered in recent edge studies, such as Jetson Nano-class devices, with active power P activ e =10 W , idle power P idle =1 . 5 W , compute throughput τ dev =2 . 0 × 10 10 FLOPs/s, and uplink/downlink communication cost ϵ =2 . 0 × 10 − 7 J/byte [43], [44]. This choice is intentional, removing hardware heterogeneity as a confounder and allowing the ev aluation to focus on the effect of CARGO’ s orchestration decisions under dropout, packet loss, and changing topology . 9 3) Client-Stress and P acket-Loss Protocol: T o assess ro- bustness to client-side instability , we ev aluate av ailability dropout p d ∈ { 0 . 2 , 0 . 5 } and participation fraction f ∈ { 0 . 25 , 0 . 5 , 1 . 0 } . Then, to e valuate robustness to unreliable communication, we consider packet-loss probability p ∈ { 0 , 0 . 05 , 0 . 1 , 0 . 2 } . Follo wing prior network-impaired FL e val- uations, lossy communication is modeled as independent per- message Bernoulli drops [45]. Messages that are not receiv ed are excluded from mixing, and mixing weights are renor- malized over delivered neighbors, so that each round still uses a valid stochastic combination. W e report both attempted communication, defined as cumulativ e payload bytes before packet-loss masking, and delivered communication, defined as the subset of those bytes actually recei ved after masking. This distinction is important because topology changes can alter effecti ve con vergence through mixing quality without necessarily inducing proportional changes in the attempted payload volume. 4) Decentralized Baseline Schemes: In terms of baseline schemes for comparisons purposes, CARGO is put against four decentralized alternativ es, spanning the main design axes relev ant to our setting. First, D-PSGD is the dense- consensus reference, enabling nodes to e xchange full-precision model information and mix with Metropolis weights over the activ e topology , follo wing the classical decentralized SGD formulation of [12]. Then, SGP replaces symmetric mixing with push-sum style communication and therefore serves as the directed/asymmetric-graph counterpart to D- PSGD [13]. Furthermore, CHOCO-SGD adds communication compression and error-feedback memory , providing a strong compression-aware decentralized baseline without carbon- aware control [14]. Finally , we include a sparse gossip base- line to represent adaptiv e peer-to-peer communication with limited fanout and sparsified exchange, following the general communication pattern studied in [15]. Overall, it should be highlighted that these baselines are complementary in terms of design. D-PSGD tests dense full-precision consensus, SGP tests directed mixing, CHOCO-SGD tests compression with memory-based correction, and Gossip communication tests sparse adaptiv e peer selection. On the other hand, CARGO extends this design space by introducing carbon-aware con- trol over node activ ation, edge activ ation, and compression decisions, while retaining the same underlying decentralized learning substrate. In greater detail, CARGO uses two fixed runtime presets, held unchanged within each experiment family to av oid per- scenario retuning. The standard preset, used for the client- stress and matched-b udget experiments, sets d max = 3 , ( χ L , χ H ) = (300 , 400) , T op-K = 0 . 05 , and R = 2 . The loss- robust preset, used for packet-loss sensitivity across the three topology regimes, sets d max = 2 , ( χ L , χ H ) = (260 , 340) , T op-K = 0 . 02 , and R = 3 . Shared controller terms are fixed throughout β = 0 , ρ ⋆ = 0 . 8 , S max = 2 , η C = η F = 0 . 01 , ϵ = 10 − 6 , and γ = 0 . 5 , with ρ i ( t ) computed over a fixed 8-round sliding window . This separation is intentional, as the standard participation/budget preset ( R = 2 ) defines a less conserv ative operating profile, whereas the loss-rob ust preset ( R = 3 ) uses lower fanout and stronger sparsification. Under harsher packet loss, extra communication and recov ery traffic offer lower expected delivered utility per transmitted byte, so the controller is designed to act more conservati vely . The presets thus separate a standard operating profile from a loss-robust one rather than tuning CARGO per scenario. The matched-budget study retains the standard preset after budget lock, with fixed deliv ered-communication and fixed- carbon targets taken from the common feasible ov erlap across methods and nearest feasible operating points selected under identical seeds and topology/loss traces. 5) Energy and Carbon Accounting: W e use a single analyti- cal accounting model throughout the experiments. Considering a decentralized setting, total cost depends not only on local computation but also on topology-dependent communication, packet loss, compression, and resynchronization, and these ef- fects must be accounted for explicitly . Following standard ML sustainability reporting practice, we compute carbon emissions by combining energy consumption with the corresponding carbon-intensity signal. Specifically , total energy at round t is E tot ( t ) = E comp ( t ) + E comm ( t ) , (35) and the associated carbon emissions are C g ( t ) = E tot ( t ) 3 . 6 × 10 6 CI( t ) , (36) where CI( t ) is expressed in gCO 2 /kWh. This formulation is consistent with the general energy-to-carbon con version adopted in ML carbon-accounting tools and prior reporting framew orks [24], [46]. Compute energy is estimated from model workload, device throughput, and acti ve power E comp ( t ) = FLOPs( t ) τ dev P active , (37) where τ dev denotes device throughput (FLOPs/s) and P active the acti ve po wer draw (W). Communication energy is esti- mated from transmitted and received payload bytes using an energy-per -byte link model, E comm ( t ) = b tx ( t ) ϵ ↑ κ ℓ + b rx ( t ) ϵ ↓ κ ℓ , (38) where b tx ( t ) and b rx ( t ) are transmitted and receiv ed bytes, ϵ ↑ and ϵ ↓ are uplink/downlink energy coefficients, and κ ℓ is a link-efficienc y factor . The same accounting is applied to all methods. This is important in our setting because topology changes may alter communication efficienc y and con vergence behavior even when the nominal degree budget remains fix ed. Since CI( t ) varies across clients and time, carbon reductions need not be proportional to energy reductions. 6) T raining Pr otocol: Clients are locally optimized with Adam, using learning rate 5 × 10 − 4 , batch size 128 , and no weight decay . Each client performs 1 local epoch per participation round, and the learning rate follows a cosine schedule. W e adopt a fixed-compute ev aluation regime in the decentralized setting by constraining the total number of local update steps, typically 84 , 000 , aggregated updates per run) and running periodic ev aluation at fixed update intervals every 7 , 000 updates. 10 Fig. 4. Model fidelity and optimization behavior . (A) Predictiv e performance ( R 2 ) versus cumulativ e compute energy , reported as median with IQR range across seeds/methods. The curve summarizes how quickly each approach reaches the high- R 2 plateau per unit energy . (B) Training and ev aluation loss trajectories (median ± IQR) as a function of cumulative local updates, illustrating stable conver gence without late-stage di vergence. (C) Example time-series segment (median ± IQR) comparing normalized ground truth and predictions, showing that the learned model tracks temporal dynamics and preserves trend changes under uncertainty . 7) Evaluation Metrics: W e report three metric groups. Predictiv e performance is measured through final ev aluation R 2 , root mean square error (RMSE), and MSE loss. Sus- tainability is measured through total energy (J) and total carbon emissions (gCO 2 e), each accounting for both compute and communication. Communication efficienc y is measured through cumulati ve communication volume, with attempted and deliv ered traffic tracked separately under packet loss, together with the empirical ef fective loss p eff = 1 − deliv ered attempted . All reported values are mean ± std ov er fi ve seeds. V I . R E S U LT S Here, we present the performance comparisons between CARGO and the four baseline schemes. Our ev aluation com- prises three axes that reflect the deployment objecti ves of the paper: (i) con vergence efficiency , (ii) robustness to client-side instability , and (iii) robustness to unreliable communication. A. Fidelity and Con ver gence Fig. 4 characterizes predicti ve fidelity and optimization dynamics. In Fig. 4A, the R 2 -energy curves show that the methods reach similar terminal performance lev els, but with different energy trajectories. CARGO reaches the high- R 2 region earlier along the energy axis, indicating improved energy-to-quality efficienc y over the training horizon. The loss trajectories in Fig. 4B decrease smoothly for both training and ev aluation, without late-stage instability . Fig. 4C provides a qualitativ e check on the learned predictor , showcasing that the median prediction follows the median ground-truth trajectory and captures the main trend rev ersals within the reported dispersion. B. P acket-Loss Sensitivity Acr oss Connectivity Re gimes Fig. 5 e valuates sensitivity to increasing packet-loss prob- ability across fragmented, mid, and well-connected regimes. As packet loss increases, RMSE generally rises and variability broadens, especially in the fragmented regime where contact opportunities are limited. Carbon and energy respond through a combination of reduced ef fective information flow and slower progress within a fixed compute budget. W ithin this Fig. 5. P acket-loss robustness across connectivity regimes. Performance and resource profiles under increasing packet-loss probability p ∈ { 0 , 0 . 05 , 0 . 1 , 0 . 2 } for three topology regimes: fragmented, mid, and well- connected. T op row: final RMSE ( × 10 − 3 ); middle row: total carbon footprint (g); bottom row: total energy consumption (J). Error bars indicate variability across seeds. The regimes correspond to distinct encounter opportunities deriv ed from the spatiotemporal contact construction (larger communication radius increases connectivity , while coarser temporal binning reduces effectiv e contacts), enabling a controlled evaluation of learning stability and efficiency as network reliability degrades. Fig. 6. Accuracy-ef ficiency trade-offs under client stress (mid topology). Six panels show R 2 versus carbon footprint for av ailability dropout p d ∈ { 0 . 2 , 0 . 5 } and participation fraction f ∈ { 0 . 25 , 0 . 5 , 1 . 0 } . Circles use the bottom x-axis (carbon, g), while squares use the top x-axis (communication volume, MB), with both markers plotted at the same R 2 for a given method and setting. The figure highlights the practical Pareto structure: CHOCO attains lower carbon/communication at the expense of accuracy , whereas CARGO remains in the high-accuracy region while reducing carbon and communication relative to accuracy-competiti ve decentralized baselines. sensitivity analysis, CARGO maintains competitiv e RMSE while sho wing fav orable carbon and energy profiles relativ e to the baselines, particularly under higher loss and sparser connectivity where orchestration decisions have a larger effect on effecti ve progress. C. Client Str ess via Dr opout and P artial P articipation T able IV quantifies the effect of av ailability dropout p d and participation fraction f on error and resource use. 11 T ABLE IV C L IE N T - S T RE S S G R ID U N D E R M I D T OP O L O GY . Method RMSE Carbon (g) Energy (J) Comm. (MB) p d = 0 . 2 , f = 0 . 25 CHOCO 0 . 0202 ± 0 . 0076 0 . 703 ± 0 . 038 7219 ± 387 146 . 9 ± 6 . 7 D-PSGD 0 . 0094 ± 0 . 0010 0 . 715 ± 0 . 038 7336 ± 387 587 . 7 ± 26 . 9 GOSSIP 0 . 0094 ± 0 . 0010 0 . 725 ± 0 . 039 7448 ± 397 846 . 0 ± 8 . 1 SGP 0 . 0094 ± 0 . 0010 0 . 725 ± 0 . 039 7441 ± 393 587 . 7 ± 26 . 9 CARGO 0 . 0095 ± 0 . 0006 0 . 713 ± 0 . 039 7443 ± 403 470 . 5 ± 17 . 9 p d = 0 . 2 , f = 0 . 50 CHOCO 0 . 0143 ± 0 . 0053 0 . 706 ± 0 . 039 7254 ± 399 297 . 4 ± 1 . 8 D-PSGD 0 . 0099 ± 0 . 0010 0 . 726 ± 0 . 039 7455 ± 398 1189 . 6 ± 7 . 3 GOSSIP 0 . 0098 ± 0 . 0008 0 . 722 ± 0 . 039 7410 ± 404 722 . 0 ± 1 . 4 SGP 0 . 0101 ± 0 . 0011 0 . 736 ± 0 . 039 7557 ± 408 1189 . 6 ± 7 . 3 CARGO 0 . 0094 ± 0 . 0010 0 . 715 ± 0 . 038 7362 ± 399 725 . 0 ± 29 . 0 p d = 0 . 2 , f = 1 . 00 CHOCO 0 . 0145 ± 0 . 0044 0 . 708 ± 0 . 037 7275 ± 383 491 . 2 ± 5 . 5 D-PSGD 0 . 0108 ± 0 . 0019 0 . 737 ± 0 . 037 7573 ± 380 1964 . 7 ± 22 . 1 GOSSIP 0 . 0109 ± 0 . 0014 0 . 715 ± 0 . 037 7346 ± 382 650 . 7 ± 1 . 8 SGP 0 . 0110 ± 0 . 0020 0 . 745 ± 0 . 037 7655 ± 380 1964 . 7 ± 22 . 1 CARGO 0 . 0101 ± 0 . 0009 0 . 713 ± 0 . 038 7344 ± 390 793 . 2 ± 10 . 6 p d = 0 . 5 , f = 0 . 25 CHOCO 0 . 0290 ± 0 . 0101 0 . 700 ± 0 . 038 7209 ± 392 134 . 7 ± 4 . 7 D-PSGD 0 . 0086 ± 0 . 0008 0 . 715 ± 0 . 038 7356 ± 391 538 . 9 ± 18 . 7 GOSSIP 0 . 0086 ± 0 . 0008 0 . 726 ± 0 . 038 7470 ± 392 905 . 5 ± 5 . 2 SGP 0 . 0086 ± 0 . 0008 0 . 724 ± 0 . 037 7450 ± 381 538 . 9 ± 18 . 7 CARGO 0 . 0082 ± 0 . 0009 0 . 709 ± 0 . 039 7307 ± 402 367 . 9 ± 19 . 4 p d = 0 . 5 , f = 0 . 50 CHOCO 0 . 0170 ± 0 . 0093 0 . 705 ± 0 . 038 7229 ± 386 235 . 3 ± 3 . 1 D-PSGD 0 . 0089 ± 0 . 0008 0 . 723 ± 0 . 038 7418 ± 386 941 . 3 ± 12 . 5 GOSSIP 0 . 0087 ± 0 . 0008 0 . 725 ± 0 . 038 7434 ± 384 796 . 6 ± 2 . 5 SGP 0 . 0088 ± 0 . 0007 0 . 732 ± 0 . 041 7510 ± 421 941 . 3 ± 12 . 5 CARGO 0 . 0084 ± 0 . 0005 0 . 711 ± 0 . 039 7313 ± 397 509 . 6 ± 10 . 0 p d = 0 . 5 , f = 1 . 00 CHOCO 0 . 0158 ± 0 . 0057 0 . 706 ± 0 . 038 7243 ± 386 313 . 3 ± 3 . 0 D-PSGD 0 . 0105 ± 0 . 0022 0 . 728 ± 0 . 039 7470 ± 393 1253 . 3 ± 11 . 9 GOSSIP 0 . 0105 ± 0 . 0016 0 . 723 ± 0 . 039 7410 ± 391 763 . 6 ± 2 . 6 SGP 0 . 0106 ± 0 . 0021 0 . 733 ± 0 . 038 7524 ± 384 1253 . 3 ± 11 . 9 CARGO 0 . 0102 ± 0 . 0005 0 . 715 ± 0 . 039 7456 ± 384 541 . 1 ± 12 . 5 Across all settings, CHOCO attains the lowest carbon, en- ergy , and communication volume, but with substantially higher RMSE, consistent with a lower-information operat- ing point. In contrast, the accuracy-competitiv e decentral- ized baselines (D-PSGD, sparse gossip, and SGP) achieve low RMSE at higher communication cost. CARGO re- mains in the high-accuracy regime while reducing resource use relativ e to these accuracy-competitiv e baselines. For example, at ( p d =0 . 5 , f =0 . 25) , CARGO improves RMSE ov er D-PSGD/SGP (0.0082 vs. 0.0086) while reducing car - bon (0.709 vs. 0.715-0.724) and communication volume (367.9 MB vs. 538.9 MB). At ( p d =0 . 2 , f =0 . 5) , it maintains comparable RMSE (0.0094) while reducing carbon relati ve to D-PSGD/SGP (0.715 vs. 0.726-0.736) and substantially reduc- ing communication (725.0 MB vs. 1189.6 MB), with ener gy also reduced (7362 J vs. 7455-7557 J). Fig. 6 summarizes these operating points and makes the trade-off structure explicit, where CHOCO occupies a low-resource/lo w-accuracy region, whereas CARGO shifts the high-accuracy region tow ard lower carbon and communication. D. Matched-Budget Comparison T o complement the Pareto-style view , we also e valuate all methods at matched operating budgets in a controlled mid- topology setting. Specifically , all methods are compared at the same feasible carbon budget, B CO2 = 0 . 6447 gCO 2 e, and the same feasible deliv ered-communication budget, B deliv = T ABLE V M A T C HE D - BU D G E T C O MPA R IS O N A T A S H A RE D C A R BO N B U DG E T A N D A S H AR E D D E L I VE R E D - C O M M UN I C A T I ON B U D GE T . Fixed CO 2 Fixed MB Method R 2 RMSE R 2 RMSE CHOCO 0 . 844 ± 0 . 124 0 . 0166 ± 0 . 0063 0 . 849 ± 0 . 116 0 . 0164 ± 0 . 0060 D-PSGD 0 . 933 ± 0 . 026 0 . 0114 ± 0 . 0021 0 . 811 ± 0 . 031 0 . 0193 ± 0 . 0015 GOSSIP 0 . 934 ± 0 . 021 0 . 0113 ± 0 . 0018 0 . 935 ± 0 . 020 0 . 0113 ± 0 . 0017 SGP 0 . 932 ± 0 . 026 0 . 0115 ± 0 . 0020 0 . 807 ± 0 . 037 0 . 0194 ± 0 . 0018 CARGO 0 . 941 ± 0 . 012 0 . 0108 ± 0 . 0011 0 . 934 ± 0 . 014 0 . 0114 ± 0 . 0012 592 . 7 MB. These budgets are defined from the common feasible intersection across methods and seeds, i.e., the largest budget lev els for which e very method-seed trajectory admits a v alid value under the corresponding budget axis. For each method and seed, the performance metric at budget is obtained by linear interpolation along the recorded trajectory . T able V shows that, at the fixed carbon budget, CARGO attains the strongest mean predictive performance, achieving the highest R 2 ( 0 . 941 ± 0 . 012 ) and the lowest RMSE ( 0 . 0108 ± 0 . 0011 ) among all methods. At the fixed delivered-communication budget, CARGO remains effecti vely tied with the strongest sparse-gossip baseline and clearly outperforms CHOCO, D- PSGD, and SGP . This comparison is important because it shows that the gains of CARGO are not explained solely by additional flexibility in the controller or by spending more budget, i.e., when carbon or delivered communication is explicitly equalized, CARGO remains best at fixed carbon and top-tier at fixed deliv ered communication. E. Complexity Analysis Concerning per-round complexity for each model ev aluated, let N denote the total number of clients, A ≤ N the number of activ e clients in a round (after availability and participation), d the model dimension, | E A | the number of directed edges in the activ e-only adjacency , and | E S | the number of directed edges actually used for communication (method-dependent). All methods share the local training term O ( A C local ( d )) per round; differences arise from mixing, compression, and scheduling. D-PSGD and SGP perform Metropolis or push- sum mixing over the activ e topology , yielding graph-aware update cost O ( | E A | d ) and communication O ( | E A | d ) ; de- pending on the implementation, dense tensor paths may incur an O ( A 2 d ) compute upper bound while transmitted bytes still scale with the realized | E A | . CHOCO follows the same neighbor scope as the activ e topology but communicates compressed deltas, giving O ( | E A | d eff + | E A | C comp ( d, ρ )) mixing/compression cost and O ( | E A | s ( d, ρ )) communication, where d eff = d for dense/int8 and d eff = ρd for T op- K , with C comp ( d, ρ ) bounded by O ( d ) (int8) or O ( d log( ρd )) (T op- K ) and s ( d, ρ ) ∈ { O ( d ) , O ( ρd ) } . The GOSSIP baseline selects one neighbor per activ e node by a local disagreement proxy , so neighbor scoring is O ( | E A | ) and communication is O ( | E S | ρd ) with | E S | ≈ A . CARGO adds a carbon-aware scheduler (score → select activ e → pick edges), i.e., node scoring and thresholding is O ( N log N ) in the worst case, edge scoring and top- k neighbor selection is O ( | E A | log k ) for out-degree cap k , and mixing o ver the selected subgraph 12 costs O ( | E S | d eff ) with | E S | ≈ Ak ; optional resynchronization for waking nodes introduces an amortized O W R d communi- cation term for W resyncing nodes ev ery R rounds. Overall, the results indicate that CARGO tar gets the high- accuracy operating re gion while reducing carbon and commu- nication relativ e to accuracy-competiti ve decentralized base- lines under both client stress and packet loss. The matched- budget analysis strengthens this interpretation by showing that CARGO remains best at a shared carbon budget and top-tier at a shared delivered-communication budget, rather than ben- efiting only from a more fav orable spending profile. CHOCO remains a lower -resource alternativ e when accuracy require- ments are relax ed, highlighting the expected cost-quality trade- off. T aken together, the evidence supports a Pareto-oriented and budget-aw are interpretation of CARGO rather than an “always-best” claim across all metrics and regimes. V I I . C O N C L U S I O N S A N D F U T U R E D I R E C T I O N S This paper presented CARGO, a carbon-aware orchestration framew ork for decentralized learning in smart-shipping en vi- ronments. As maritime learning systems must operate under intermittent connectivity , partial participation, unreliable com- munication, and increasing pressure to account for resource use and emissions novel collaborative AI frameworks must be provided. In this setting, decentralized training should not be treated as a fix ed communication routine, and to wards this end, CARGO separates the learning process into a control plane and a data plane, lev eraging the former to jointly regulate node participation, edge activ ation, compression, and recovery be- havior . Methodologically , we formulated carbon-aware decen- tralized maritime PdM as an online control problem ov er par- ticipation and communication decisions. At the systems le vel, we showed that decentralized learning for smart ships can be improv ed without changing the local predictor or abandoning established gossip-style updates, with the key being to control when, where, and how communication takes place. Perfor- mance ev aluation demonstrated that across client-av ailability stress and packet-loss conditions, CARGO remained in the high-accuracy regime while reducing carbon footprint and communication relati ve to the accuracy-competitiv e decentral- ized baselines. The matched-budget analysis further strength- ened this point, as when methods were compared at the same feasible carbon budget, CARGO achie ved the strongest mean predictiv e performance, and when compared at the same deliv ered-communication budget, it remained top-tier and effecti vely tied with the strongest sparse-gossip baseline. This is important because it shows that the observed advantage is not simply a byproduct of spending more carbon or com- munication budget. Overall, our work highlights that carbon- aware gossip orchestration is a viable direction for maritime AI, and that resource-aware decentralized learning deserves to be treated as a transportation-systems problem rather than as a minor variant of generic federated learning. The present study also has clear scope boundaries. The ev aluation is trace-driven rather than a li ve fleet deployment, focusing on one PdM task and one homogeneous edge-device profile so that differences across methods can be attrib uted to orchestration rather than to hardware v ariability . In addition, the experiments prioritize realistic maritime stressors, i.e., changing topology , dropout, and packet loss, over very-lar ge- fleet scaling. Security and priv acy mechanisms were also kept outside the present scope, so that the effect of orches- tration could be isolated from cryptographic or adversary- robust learning components. Future work will therefore ex- tend the framew ork along three directions: (i) broader fleet- scale ev aluation over larger and more heterogeneous maritime deployments, (ii) richer communication models that capture delay and bursty loss in addition to packet drops, and (iii) inte- gration with secure or adversary-rob ust decentralized learning mechanisms. A C K N O W L E D G M E N T S The authors would like to thank Laskaridis Shipping Co., Ltd., for data provision. R E F E R E N C E S [1] U. N. Trade and D. (UNCT AD), Review of Maritime T ransport 2024: Navigating Maritime Chokepoints . Stylus Publishing, LLC, 2024. [2] R. MEPC, “2023 imo strategy on reduction of ghg emissions from ships, ” 2023. [3] A. L. Ellefsen, V . Æsøy , S. Ushakov , and H. Zhang, “ A comprehensiv e survey of prognostics and health management based on deep learning for autonomous ships, ” IEEE T ransactions on Reliability , vol. 68, no. 2, pp. 720–740, 2019. [4] Q. Liang, K. E. Knutsen, E. V anem, V . Æsøy , and H. Zhang, “ A revie w of maritime equipment prognostics health management from a classification society perspective, ” Ocean Engineering , vol. 301, p. 117619, 2024. [5] W . Jiang, Z. Xiao, L. P . Qian, S. Qin, G. Feng, and Y . W u, “Joint communication and computing resource allocation for energy ef ficient hierarchical federated learning in marine internet of things, ” IEEE T ransactions on Network Science and Engineering , 2025. [6] A. S. Kalafatelis, A. Pitsiakou, N. Nomikos, N. Tsoulakos, T . Syri- opoulos, and P . T rakadas, “Fluid: Dynamic model-agnostic federated learning with pruning and knowledge distillation for maritime predictive maintenance, ” Journal of Marine Science and Engineering , vol. 13, no. 8, p. 1569, 2025. [7] J. Pei, W . Liu, J. Li, L. W ang, and C. Liu, “ A re view of federated learning methods in heterogeneous scenarios, ” IEEE T ransactions on Consumer Electr onics , vol. 70, no. 3, pp. 5983–5999, 2024. [8] B. McMahan, E. Moore, D. Ramage, S. Hampson, and B. A. y Arcas, “Communication-efficient learning of deep networks from decentralized data, ” in Artificial intelligence and statistics . Pmlr, 2017, pp. 1273– 1282. [9] F . S. Alqurashi, A. Trichili, N. Saeed, B. S. Ooi, and M.-S. Alouini, “Maritime communications: A survey on enabling technologies, oppor- tunities, and challenges, ” IEEE Internet of Things Journal , vol. 10, no. 4, pp. 3525–3547, 2022. [10] T . W ei, W . Feng, Y . Chen, C.-X. W ang, N. Ge, and J. Lu, “Hybrid satellite-terrestrial communication networks for the maritime internet of things: Key technologies, opportunities, and challenges, ” IEEE Internet of things journal , vol. 8, no. 11, pp. 8910–8934, 2021. [11] I. Heged ˝ us, G. Danner, and M. Jelasity , “Gossip learning as a decentral- ized alternativ e to federated learning, ” in IFIP International Conference on Distributed Applications and Interoper able Systems . Springer , 2019, pp. 74–90. [12] X. Lian, C. Zhang, H. Zhang, C.-J. Hsieh, W . Zhang, and J. Liu, “Can decentralized algorithms outperform centralized algorithms? a case study for decentralized parallel stochastic gradient descent, ” Advances in neural information pr ocessing systems , vol. 30, 2017. [13] M. Assran, N. Loizou, N. Ballas, and M. Rabbat, “Stochastic gradient push for distributed deep learning, ” in International Conference on Machine Learning . PMLR, 2019, pp. 344–353. [14] A. Kolosk ova, S. Stich, and M. Jaggi, “Decentralized stochastic op- timization and gossip algorithms with compressed communication, ” in International conference on machine learning . PMLR, 2019, pp. 3478– 3487. 13 [15] Z. T ang, S. Shi, B. Li, and X. Chu, “Gossipfl: A decentralized federated learning framework with sparsified and adaptive communication, ” IEEE T ransactions on P arallel and Distributed Systems , vol. 34, no. 3, pp. 909–922, 2022. [16] A. S. Kalafatelis, N. Nomikos, A. Giannopoulos, and P . Trakadas, “ A survey on predictiv e maintenance in the maritime industry using machine and federated learning, ” Author ea Pr eprints , vol. 11, 2024. [17] I. Heged ˝ us, G. Danner , and M. Jelasity , “Decentralized learning works: An empirical comparison of gossip learning and federated learning, ” Journal of P arallel and Distributed Computing , vol. 148, pp. 109–124, 2021. [18] A. Tundo, F . Filippini, F . Regonesi, M. Ciavotta, and M. Savi, “De- centralized edge workload forecasting with gossip learning, ” IEEE T ransactions on Network and Service Management , 2025. [19] D. Alistarh, D. Grubic, J. Li, R. T omioka, and M. V ojnovic, “Qsgd: Communication-efficient sgd via gradient quantization and encoding, ” Advances in neural information pr ocessing systems , vol. 30, 2017. [20] S. U. Stich, J.-B. Cordonnier, and M. Jaggi, “Sparsified sgd with memory , ” Advances in neural information processing systems , v ol. 31, 2018. [21] S. P . Karimireddy , Q. Rebjock, S. Stich, and M. Jaggi, “Error feedback fixes signsgd and other gradient compression schemes, ” in International confer ence on machine learning . PMLR, 2019, pp. 3252–3261. [22] H. Y e, L. Liang, and G. Y . Li, “Decentralized federated learning with unreliable communications, ” IEEE journal of selected topics in signal pr ocessing , vol. 16, no. 3, pp. 487–500, 2022. [23] R. Schwartz, J. Dodge, N. A. Smith, and O. Etzioni, “Green ai, ” Communications of the ACM , vol. 63, no. 12, pp. 54–63, 2020. [24] P . Henderson, J. Hu, J. Romoff, E. Brunskill, D. Jurafsky , and J. Pineau, “T owards the systematic reporting of the ener gy and carbon footprints of machine learning, ” Journal of machine learning r esearc h , vol. 21, no. 248, pp. 1–43, 2020. [25] S. Savazzi, V . Rampa, S. Kianoush, and M. Bennis, “ An energy and carbon footprint analysis of distributed and federated learning, ” IEEE T ransactions on Green Communications and Networking , vol. 7, no. 1, pp. 248–264, 2022. [26] E. Guerra, F . W ilhelmi, M. Miozzo, and P . Dini, “The cost of training machine learning models ov er distributed data sources, ” IEEE Open Journal of the Communications Society , vol. 4, pp. 1111–1126, 2023. [27] R. Albelaihi, L. Y u, W . D. Craft, X. Sun, C. W ang, and R. Gazda, “Green federated learning via energy-aw are client selection, ” in GLOBECOM 2022-2022 IEEE Global Communications Confer ence . IEEE, 2022, pp. 13–18. [28] A. Y ousefpour, S. Guo, A. Shenoy , S. Ghosh, P . Stock, K. Maeng, S.- W . Kr ¨ uger , M. Rabbat, C.-J. Wu, and I. Mironov , “Green federated learning, ” arXiv preprint , 2023. [29] M. A. Dinani, A. Holzer , H. Nguyen, M. A. Marsan, and G. Rizzo, “Context-awa re orchestration of energy-ef ficient gossip learn- ing schemes, ” in 2024 IEEE W orld AI IoT Congress (AIIoT) . IEEE, 2024, pp. 192–198. [30] Z. Zhang, C. Guan, H. Chen, X. Y ang, W . Gong, and A. Y ang, “ Adaptive priv acy-preserving federated learning for fault diagnosis in internet of ships, ” IEEE Internet of Things Journal , vol. 9, no. 9, pp. 6844–6854, 2021. [31] H. W ang, R. Y an, M. H. Au, S. W ang, and Y . J. Jin, “Federated learning for green shipping optimization and management, ” Advanced Engineering Informatics , vol. 56, p. 101994, 2023. [32] A. S. Kalafatelis, N. Nomikos, A. Giannopoulos, G. Alexandridis, A. Karditsa, and P . T rakadas, “T owards predicti ve maintenance in the maritime industry: A component-based overvie w , ” Journal of Marine Science and Engineering , vol. 13, no. 3, p. 425, 2025. [33] P . Zhang, Z. Gao, L. Cao, F . Dong, Y . Zou, K. W ang, Y . Zhang, and P . Sun, “Marine systems and equipment prognostics and health management: a systematic re view from health condition monitoring to maintenance strategy , ” Machines , vol. 10, no. 2, p. 72, 2022. [34] T . Li, M. Sanjabi, A. Beirami, and V . Smith, “Fair resource allocation in federated learning, ” arXiv preprint , 2019. [35] L. Xiao and S. Boyd, “Fast linear iterations for distributed averaging, ” Systems & Contr ol Letters , vol. 53, no. 1, pp. 65–78, 2004. [36] S. Boyd, A. Ghosh, B. Prabhakar , and D. Shah, “Randomized gossip algorithms, ” IEEE transactions on information theory , vol. 52, no. 6, pp. 2508–2530, 2006. [37] A. S. Kalafatelis, V . Nikolakakis, N. Tsoulakos, and P . Trakadas, “Priv acy-preserving hierarchical federated learning over data spaces, ” in Pr oceedings of the 13th IEEE International Confer ence on Big Data , 2025, pp. 6424–6433. [38] M. Cheliotis, I. Lazakis, and G. Theotokatos, “Machine learning and data-driv en fault detection for ship systems operations, ” Ocean Engi- neering , vol. 216, p. 107968, 2020. [39] Z. Ji, H. Gan, and B. Liu, “ A deep learning-based fault warning model for exhaust temperature prediction and fault warning of marine diesel engine, ” Journal of Marine Science and Engineering , vol. 11, no. 8, p. 1509, 2023. [40] B. Liu, H. Gan, D. Chen, and Z. Shu, “Research on fault early warning of marine diesel engine based on cnn-bigru, ” Journal of Marine Science and Engineering , vol. 11, no. 1, p. 56, 2022. [41] A. S. Kalafatelis, G. Levis, A. Giannopoulos, N. Tsoulakos, and P . Trakadas, “Explainable predictive maintenance of marine engines using a hybrid bilstm-attention-kolmogorov arnold network, ” Journal of Marine Science and Engineering , vol. 14, no. 1, p. 32, 2025. [42] T . Emmens, C. Amrit, A. Abdi, and M. Ghosh, “The promises and perils of automatic identification system data, ” Expert Systems with Applications , vol. 178, p. 114975, 2021. [43] R. Anuja and J. Annrose, “End-to-end deep learning for smart maritime threat detection: an ae–cnn–lstm-based approach, ” Scientific Reports , vol. 15, no. 1, p. 36316, 2025. [44] M. Cruz, E. H. T eixeira, S. B. Mafra, and F . A. P . de Figueiredo, “ A multi-faceted approach to maritime security: Federated learning computer vision and iot in edge computing, ” in XLI Brazilian Symposium on T elecommunications and Signal Processing , 2023. [45] G. Cleland, D. Wu, R. Ullah, and B. V arghese, “Fedcomm: Under- standing communication protocols for edge-based federated learning, ” in 2022 IEEE/ACM 15th International Conference on Utility and Cloud Computing (UCC) . IEEE, 2022, pp. 71–81. [46] A. Lacoste, A. Luccioni, V . Schmidt, and T . Dandres, “Quantifying the carbon emissions of machine learning. arxiv 2019, ” arXiv pr eprint arXiv:1910.09700 , 2019. Alexandros S. Kalafatelis (Graduate Student Mem- ber , IEEE) is a Ph.D. candidate at the Dept. of Ports Management and Shipping of the National and Kapodistrian University of Athens (NKUA). He is also a Senior Research Scientist at Four Dot Infinity . He holds a B.Sc. (Hons) in Biomedical Sciences from the Uni versity of East London, as well as a B.Eng. in Electrical Engineering and an M.Sc. in Intelligent Management of Renewable Energy Systems, both from NKUA. Part of his research has been conducted in the framew ork of several Euro- pean funded R&D projects, focusing on Predictive Maintenance applications lev eraging Federated Learning, with an emphasis on developing secure and optimized aggregation methods tailored to the maritime industry . He serves as a peer revie wer for several IEEE venues, including IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY and IEEE ACCESS. He also serves as a committee member for the Ship Maintenance, Repair, and Safety Special Interest Group at the Institute of Marine Engineering, Science and T echnology (IMarEST) and is the recipient of the Stanley Gray Fellowship. Nikolaos Nomikos (Senior Member , IEEE) (Senior Member , IEEE) receiv ed the Diploma in electrical engineering and computer technology from the Uni- versity of Patras, Patras, Greece, in 2009, and the M.Sc. and Ph.D. degrees from the Information and Communication Systems Engineering Department, Univ ersity of the Aegean, Samos, Greece, in 2011 and 2014, respectively . Since 2025, he has been an Assistant Professor of Mobile and Satellite Commu- nications Systems, Department of Information and Communication Systems Engineering, University of the Aegean, Samos, Greece. Moreov er, he is a Project Manager with Four Dot Infinity P .C and a Senior Researcher at the National and Kapodistrian Univ ersity of Athens. His research interests include cooperativ e communica- tions, non-orthogonal multiple access, non-terrestrial networks, and machine learning for wireless networks optimization. Prof. Nomikos is an Editor of IEEE TRANSA CTIONS ON COMMUNICA TIONS and Associate Editor for Frontiers in Communications and Networks. He is a Member of the IEEE Communications Society and the T echnical Chamber of Greece. 14 V asileios Nikolakakis is a Master’s candidate in Intelligent Management of Renewable Energy Sys- tems of the National and Kapodistrian University of Athens (NKUA). He is also a Research Scientist at Four Dot Infinity . He holds a B.Eng in Electrical Engineering from NKU A. His research has been conducted in the framework of several European funded R&D projects focusing on 5G with primary emphasis on 5G and beyond networks, O-RAN ar - chitectures, software-defined networking and secure core network infrastructures. He is also exploring artificial intelligence and machine learning in the scope of network optimiza- tion, anomaly detection and resource orchestration, along with DevOps-driv en deployment strategies for scalable and reproducible telecom environments. Nikokaos Tsoulakos graduated from the School of Engineering at the Merchant Marine Academy of Aspropyrgos, attaining the rank of Engineer C’ Class. He then continued obtaining a MEng in Nav al Architecture and Marine Engineering and a MSc degree in Marine Science and T echnology both from the National T echnical Univ ersity of Athens. Subsequently , he achiev ed his third BSc degree in Maritime Studies from the University of Piraeus. Currently , he serves as the Innovation & T echnology Manager at Laskaridis Shipping Co. L TD., where he is responsible for overseeing the company’ s innov ation strategy . Panagiotis T rakadas received the Dipl.- Ing. degree in electrical and computer engineering and the Ph.D. degree from the National T echnical Univ ersity of Athens (NTUA). In the past, he was worked at Hellenic Aerospace Industry (HAI), as a Senior Engineer , on the design of military wireless telecom- munications systems, and the Hellenic Authority for Communications Security and Priv acy , where he was holding the position of the Director of the Division for the Assurance of Infrastructures and T elecommunications Services Privac y . He is currently a Professor with the National and Kapodistrian University of Athens. He has been actively in volved in many EU FP7 and H2020 Research Projects. He has published more than 170 papers in magazines, journals, and conference proceedings. His research interests include the fields of wireless and mobile communications, wireless sensor networking, network function virtualization, and cloud computing. He is a Re viewer in several journals, including IEEE TRANSA CTIONS ON COMMUNICA TIONS and IEEE TRANSACTIONS ON ELECTROMA GNETIC COMP A TIBILITY journals.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment