Extremum-Based Joint Compression and Detection for Distributed Sensing
We study joint compression and detection in distributed sensing systems motivated by emerging applications such as IoT-based localization. Two spatially separated sensors observe noisy signals and can exchange only a $k$-bit message over a reliable o…
Authors: Amir Weiss, Alej, ro Lancho
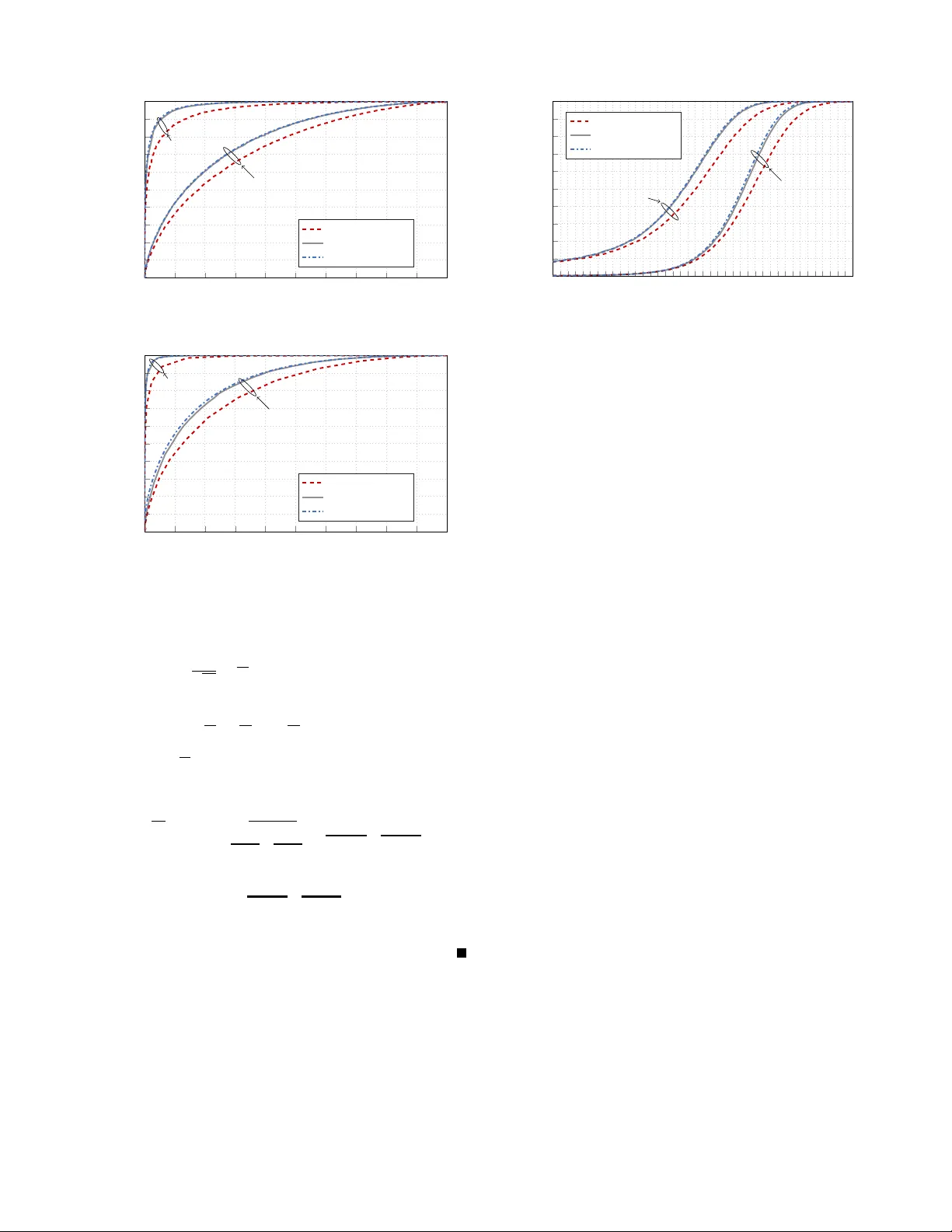
1 Extremum-Based Joint Compression and Detection for Distrib uted Sensing Amir W eiss ⋆ and Alejandro Lancho † ⋆ Faculty of Engineering, Bar -Ilan Univ ersity , Ramat Gan, Israel Signal Theory and Communications Department, Uni versidad Carlos III de Madrid, Leganes, Spain amir .weiss@biu.ac.il, alancho@ing.uc3m.es Abstract —W e study joint compression and detection in dis- tributed sensing systems motivated by emerging applications such as IoT -based localization. T wo spatially separated sensors observe noisy signals and can exchange only a k -bit message over a reliable one-way low-rate link. One sensor compresses its obser vation into a k -bit description to help the other decide whether their observ ations share a common underlying signal or are statistically independent. W e propose a simple extremum- based strategy , in which the encoder sends the index of its largest sample and the decoder performs a scalar threshold test. W e derive exact nonasymptotic false-alarm and misdetection proba- bilities and v alidate the analysis with representati ve simulations. Index T erms —Distributed detection, joint compression and de- tection, communication-constrained sensing, extremum encoding . I . I N T R O D U C T I O N Modern communication and sensing systems operate under growing pressure. The electromagnetic spectrum is increas- ingly crowded, and services compete for bandwidth under stringent demands on latency , reliability , and energy efficienc y . Furthermore, when it comes to distrib uted sensing applica- tions, such as large-scale IoT deplo yments, an additional difficulty arises: each sensor acquires only local, noisy , and incomplete measurements of the environment. When resources are scarce, to meet reliability demands, such partial observa- tions cannot simply be compensated for by sending more data. Communication systems hav e traditionally been designed so that the receiv er can r econstruct the entire transmitted signal , ev en when only a small portion of that information is relev ant for a downstream decision. An illustrative example is image transmission, where compression and channel coding are op- timized to preserve every sample or pixel with high fidelity , ev en if the final task requires only a (possibly tin y) subset of that information. This kind of mismatch becomes particularly limiting in distributed sensing. Exchanging all locally observed data across sensors would be equiv alent to transmitting every pixel of an image just to identify a single object. Under bandwidth, latency , and energy constraints, such strategies are impractical. Hence, classical centralized detectors, which rely on full access to all observ ations to implement procedures such as the generalized likelihood ratio test (GLR T) [ 1 ], become infeasible in these constrained settings. A. Lancho is also with the Gregorio Mara ˜ n ´ on Health Research Institute, Madrid, 28007, Spain. He received funding from the Comunidad de Madrid under Grant Agreements No. 2023-T1/COM-29065 (C ´ esar Nombela program) and TEC-2024/COM-89, and from the Ministerio de Ciencia, Innovaci ´ on y Univ ersidades, Spain under Grant Agreement No. PID2023-148856OA-I00. Motiv ated by these challenges, we study a fundamental in- stance of task-oriented communication in distributed sensing, namely joint compression and detection [ 2 ]–[ 5 ]. In particular , we consider the case where two spatially separated sensors must decide whether their observ ations correspond to noisy , delayed versions of the same underlying signal or whether they are independent, while being restricted to a unidirectional communication b udget of only k bits. This abstraction captures a class of collaborativ e detection problems in which raw data exchange is infeasible but accurate decisions about statistical dependence or source association are still required. Hence, the central question guiding this work is: How can a pair of spatially separated sensors cooperate to perform r eliable detection under tight communication constraints? Driv en by this motiv ation, we develop a joint compression– detection scheme and deriv e exact closed-form expressions for the false-alarm (F A) and misdetection (MD) probabilities, which constitute a detector’ s full statistical characterization. I I . P R O B L E M F O R M U L ATI O N Consider two spatially separated sensors, each of which observes a signal. Sensor 1, the encoder, communicates with Sensor 2, the decoder, over a one-way noiseless link, ov er which it can conv ey a k -bit message. Sensor 2 is co-located with the computing unit and must decide, based on the re- ceiv ed message and its local observ ation, whether the observed signals are statistically independent or noisy , shifted v ersions of a common source (a prerequisite for , e.g., [ 6 ]). Let { x [ n ] } n ∈ Z and { y [ n ] } n ∈ Z denote the observations at the encoder (Sensor 1) and the decoder (Sensor 2), respec- tiv ely . W e model the signals via an underlying source process { s [ n ] } n ∈ Z and noise processes { z 1 [ n ] } n ∈ Z , { z 2 [ n ] } n ∈ Z , where s [ n ] iid ∼ N (0 , σ 2 s ) , z i [ n ] iid ∼ N (0 , σ 2 i ) , i ∈ { 1 , 2 } , (1) and { s [ n ] } , { z 1 [ n ] } , and { z 2 [ n ] } are mutually statistically independent, where iid stands for independent, identically distributed. The detection task consists in deciding between the following two hypotheses: H 0 : ® x [ n ] = z 1 [ n ] y [ n ] = z 2 [ n ] , (the null hypothesis) (2) H 1 : ® x [ n ] = s [ n ] + z 1 [ n ] y [ n ] = s [ n − d ] + z 2 [ n ] , (the alternativ e hypothesis) (3) 2 where d ∈ D ≜ {− d m , . . . , d m } is an unkno wn deterministic time delay , d m ∈ R + being the (absolute) maximal delay , and σ 1 , σ 2 , σ s ∈ R + are deterministic unknowns. By construction, it follows that the conditional cross- correlation between the two observations satisfies E [ y [ n ] x [ n − ℓ ] | H ] = ( 0 , H = H 0 , R ss [ ℓ − d ] , H = H 1 , (4) where R ss [ ℓ ] ≜ E [ s [ n ] s [ n − ℓ ]] = σ 2 s · 1 { ℓ =0 } denotes the autocorrelation of the white process { s [ n ] } n ∈ Z . The encoder observes X N ≜ { x [ n ] } N − 1 n =0 and transmits m = f ( X N ) ∈ { 0 , 1 } k × 1 , (5) a k -bit message, where f : R N × 1 → { 0 , 1 } k × 1 denotes the (block) encoding rule. The decoder observes { y [ n ] } n ∈ Z and the receiv ed message m , and applies a decision rule δ : { 0 , 1 } k × 1 × R N × 1 → {H 0 , H 1 } , (6) so that the final decision is δ ( m , Y N ) , where Y N is a batch of N samples of { y [ n ] } , which can be chosen by the decoder . W e assume equal priors P ( H = H 0 ) = P ( H = H 1 ) = 1 2 and aim to minimize the overall error probability P ( δ ( m , Y N ) = H ) . More specifically , for a prescribed tolerance on the F A prob- ability—declaring H 1 when H 0 holds—we seek to minimize the MD probability—declaring H 0 when H 1 holds. Formally , for a giv en F A lev el α ∈ [0 , 1] , we consider inf f : R N × 1 →{ 0 , 1 } k × 1 δ : { 0 , 1 } k × 1 × R N × 1 →{H 0 , H 1 } P ( δ = H 0 | H 1 ) (7) s . t . P ( δ = H 1 | H 0 ) ≤ α. (8) This Neyman–Pearson formulation serves as a benchmark for designing low-comple xity , k -bit-constrained schemes. I I I . M A I N R E S U LT S W e now present our main results. First, we describe the proposed joint compression–detection scheme operating un- der the k -bit communication constraint, and then dev elop a nonasymptotic performance analysis that characterizes its behavior at finite blocklength. In particular , we derive exact expressions for the resulting F A and MD probabilities, thus providing a full and accurate characterization of our scheme. A. Proposed Joint Compression and Detection Sc heme Below is our proposed, particularly simple, k -bit scheme, referred to as the maximum-index-based detector (MID). At a high lev el, the encoder con veys only the location of its largest sample, and the decoder then inspects a small neighborhood around this location in its own observation and compares the largest aligned sample to a threshold. Scheme definition: Fix a blocklength N = 2 k , an admis- sible delay set D = {− d m , . . . , d m } , and a threshold τ ∈ R + . The scheme operates as follo ws. 1) Encoder (Sensor 1): The encoder observ es the block X N and computes the index of its maximum, j ≜ arg max 0 ≤ n ≤ N − 1 x [ n ] . (9) Under the continuous Gaussian model, this maximum is almost surely unique; otherwise, any fixed tie-breaking rule is used. The encoder then maps j to its k -bit binary representation, and transmits m to the decoder . 2) Decoder (Sensor 2): The decoder receiv es m and recov- ers the index j . Since it observes { y [ n ] } n ∈ Z , it can in particular access the samples Y D N ≜ { y [ n ] } N − 1+ d m n = − d m . (10) The decoder forms the test statistic t MID ≜ max ℓ ∈D y [ j + ℓ ] , (11) i.e., the largest sample of the process y [ n ] in the admis- sible delay set around the reported e xtremum index j . 3) Decision rule: The final decision is obtained by a scalar threshold test: δ MID ( m , Y D N ) ≜ ( H 1 , if t MID ≥ τ , H 0 , if t MID < τ , (12) or , equiv alently , max ℓ ∈D y [ j + ℓ ] H 1 ≷ H 0 τ , (13) where the threshold τ is chosen to meet a prescribed F A lev el, as characterized in the analysis in Section III-C . In the next subsection we dev elop an intuitive interpre- tation of this scheme by relating it to the GLR T without communication constraints: we show that the latter reduces to a threshold test on an empirical cross-correlation statistic, and that our extremum-based rule can similarly be vie wed as a scaled empirical cross-correlation computed under a k -bit constraint. W e then proceed to derive an exact nonasymptotic characterization of the resulting F A and MD probabilities. B. The GLRT in a Constraint-F r ee Communication Setting and Its Relation to the Pr oposed Sc heme Consider an ideal setting, without any communication con- straint, in which a fusion center has full access to both obser- vation blocks X N and Y D N . In this case, a natural benchmark is the GLR T for deciding between independence and a time- shifted common source. For a fixed time-delay d ∈ D , define the aligned pairs { ( x [ n ] , y [ n + d ]) } N − 1 n =0 . From the viewpoint of the fusion center , only the joint second-order statistics (SOSs) of these pairs matter . Under H 0 , they are independent zero-mean Gaussian with some ( a priori unknown) marginal variances and zero correlation; under H 1 with delay d , they are still zero-mean jointly Gaussian, but with a nonzero correlation. Thus, for each d we can write [ x [ n ] y [ n + d ]] T ∼ N 0 , Σ i ( d ) , (14) where, for i ∈ { 0 , 1 } , Σ 0 ( d ) = ï σ 2 x , 0 0 0 σ 2 y , 0 ò , Σ 1 ( d ) = ï σ 2 x , 1 ρ d σ x , 1 σ y , 1 ρ d σ x , 1 σ y , 1 σ 2 y , 1 ò , (15) with σ 2 x , 0 , σ 2 y , 0 , σ 2 x , 1 , σ 2 y , 1 > 0 and ρ d ∈ ( − 1 , 1) treated as unknown nuisance parameters. The only structural assump- tions we impose for the GLR T are that Σ 0 ( d ) is diagonal 3 (independence under H 0 ) and that Σ 1 ( d ) has a free off- diagonal entry (correlation under H 1 ). In our model ( 2 )–( 3 ), the relev ant SOS parameters are Σ 0 ( d ) = ï σ 2 1 0 0 σ 2 2 ò , Σ 1 ( d ) = ï σ 2 s + σ 2 1 σ 2 s σ 2 s σ 2 s + σ 2 2 ò , (16) so that the (population) correlation coefficient at delay d is ρ d = σ 2 s p ( σ 2 s + σ 2 1 )( σ 2 s + σ 2 2 ) . (17) For the GLR T deri vation, ho wever , we only use the generic form Σ 0 ( d ) , Σ 1 ( d ) and treat their entries as unknown SOS parameters consistent with the abo ve structure. Thus, let b σ 2 x ≜ 1 N N − 1 X n =0 x 2 [ n ] , b σ 2 y ( d ) ≜ 1 N N − 1 X n =0 y 2 [ n + d ] , (18) b σ xy ( d ) ≜ 1 N N − 1 X n =0 x [ n ] y [ n + d ] , (19) denote the empirical variances and cross-cov ariance at delay d , respecti vely , and define the empirical correlation coef ficient b ρ ( d ) ≜ b σ xy ( d ) b σ x b σ y ( d ) , b σ x ≜ p b σ 2 x , b σ y ( d ) ≜ » b σ 2 y ( d ) . (20) For each d ∈ D , define the (maximized) likelihood ratio Λ d ( X N , Y D N ) ≜ sup Σ 1 ( d ) p ( X N , Y D N | H 1 , d, Σ 1 ( d )) sup Σ 0 ( d ) p ( X N , Y D N | H 0 , Σ 0 ( d )) , (21) where the numerator optimizes over all positive-definite Σ 1 ( d ) of the form abo ve, and the denominator optimizes ov er diag- onal matrices Σ 0 ( d ) . The GLR T forms the statistic Λ GLR T ( X N , Y D N ) ≜ max d ∈D Λ d ( X N , Y D N ) (22) and compares it to a threshold: Λ GLR T ( X N , Y D N ) H 1 ≷ H 0 η . (23) For Gaussian data, the maximum-likelihood estimates of the covariance matrices in the numerator and denominator coincide, respectiv ely , with b Σ 1 ( d ) = ï b σ 2 x b σ xy ( d ) b σ xy ( d ) b σ 2 y ( d ) ò , b Σ 0 ( d ) = ï b σ 2 x 0 0 b σ 2 y ( d ) ò . (24) Substituting these estimates into the likelihoods under H 0 and H 1 and simplifying shows that, for each d , the ratio Λ d ( X N , Y D N ) is a strictly increasing function of b ρ 2 ( d ) . Con- sequently , the GLR T is equiv alent to a threshold test max d ∈D b ρ ( d ) H 1 ≷ H 0 γ , (25) for some threshold γ chosen to meet a desired F A lev el. In simple words, in the absence of communication constraints , the GLR T reduces to a v ariance-inv ariant correlator: it de- clares H 1 whenev er the maximum normalized empirical cross- correlation between the two sensors e xceeds a threshold. T o highlight the connection with the GLR T , consider the extr emum-based empirical cr oss-corr elation estimator [ 6 ] b ρ MIE ( ℓ ) ≜ y [ j + ℓ ] E [ x [ j ]] , ∀ ℓ ∈ D , (26) where the denominator is the mean of the maximum sample x [ j ] . 1 Each b ρ MIE ( ℓ ) uses precisely one pair ( x [ j ] , y [ j + ℓ ]) and can thus be viewed as a single-sample empirical correlation coefficient built from the (mean of the) encoder’ s maximum sample and the corresponding shifted sample at the decoder . The behavior of b ρ MIE ( ℓ ) as an estimator of the underly- ing correlation is characterized in closely related settings in extremum-encoding-based time-delay estimation in [ 6 ]–[ 8 ]. In particular, for standard jointly Gaussian processes with correlation coefficient ρ and iid samples, one has E b ρ MIE ( ℓ ) = ρ, (27) when E [ x [ n ] y [ n + ℓ ]] = ρ and the variance of b ρ MIE ( ℓ ) decays on the order of 1 /k as the message length k grows. In our model, under H 0 the observations at the two sensors are independent, so E [ x [ n ] y [ n + ℓ ]] = 0 for all ℓ , and hence E b ρ MIE ( ℓ ) | H 0 = 0 , ∀ ℓ ∈ D . (28) Under H 1 with true time delay d , the cross-correlation between the aligned pairs satisfies E [ x [ n ] y [ n + ℓ ] | H 1 ] = σ 2 s · 1 { ℓ = d } , (29) so that the corresponding correlation coefficient is ρ d ( 17 ) for ℓ = d and 0 for ℓ = d . Hence, E b ρ MIE ( ℓ ) | H 1 = ( ρ d , ℓ = d, 0 , ℓ = d. (30) Since E [ x [ j ]] does not depend on ℓ , the test based on t MID can be equiv alently expressed as a threshold test on the maximum of these correlation estimates. Indeed, from ( 13 ) and ( 26 ), max ℓ ∈D y [ j + ℓ ] = E [ x [ j ]] · max ℓ ∈D b ρ MIE ( ℓ ) , (31) so that t MID H 1 ≷ H 0 τ ⇐ ⇒ max ℓ ∈D b ρ MIE ( ℓ ) H 1 ≷ H 0 γ , (32) with γ ≜ τ / E [ x [ j ]] . Thus, our detector ( 12 ) is also a corr elation test : it compares the maximum o ver ℓ of a suitably scaled empirical cross-correlation coefficient to a threshold. Comparing this with the GLR T statistic ( 25 ), we see that, in the absence of communication constraints, the GLR T uses all N aligned samples to form normalized empirical cross- correlations b ρ ( d ) and thresholds max d ∈D b ρ ( d ) , whereas our scheme compresses the observ ation of the encoder into the sin- gle extremum index j and then forms one-sample (extremum- based) empirical correlations b ρ MIE ( ℓ ) at the decoder , threshold- ing max ℓ ∈D b ρ MIE ( ℓ ) . The two rules thus share the same core structure, dif fering only in how the empirical cross-correlation is estimated under the k -bit communication constraint. 1 In the Gaussian setting, this mean can be expressed in closed-form in terms of the variance of x [ n ] and the blocklength N ; see, e.g., related extremum- based correlation estimators in [ 6 ] and references therein. Its exact value is not needed for the structural interpretation that follows. 4 C. Nonasymptotic P erformance Analysis W e now characterize the performance of the extremum- based detector . Specifically , for a fixed threshold τ , we derive nonasymptotic closed-form expressions for the resulting F A and MD probabilities under the statistical model ( 2 )–( 3 ) pre- sented in Section II . Throughout this subsection, we consider the decision rule is gi ven by ( 12 ). F alse-alarm pr obability: Under H 0 , the processes at the two sensors are independent, and the samples { y [ j + ℓ ] } ℓ ∈D used by the detector are iid Gaussian with variance σ 2 2 . The F A event is therefore the event that at least one of these 2 d m + 1 samples exceeds the threshold τ . This yields the following result. Pr oposition 1 (F A pr obability): For the decision rule ( 12 ), the F A probability P F A ( τ ) ≜ P ( δ ( m , Y N ) = H 1 | H 0 ) is giv en by P F A ( τ ) = 1 − Å 1 − Q Å τ σ 2 ãã 2 d m +1 , (33) where Q ( x ) ≜ 1 √ 2 π R ∞ x e − t 2 2 d t is the standard Q -function. Pr oof: W e ha ve P F A ( τ ) = P ( t MID ≥ τ | H 0 ) (34) = P Å max ℓ ∈D y [ j + ℓ ] ≥ τ | H 0 ã (35) = 1 − P Å max ℓ ∈D z 2 [ j + ℓ ] ≤ τ ã (36) = 1 − P ( z 2 [ n ] < τ ) |D| (37) = 1 − Å 1 − Q Å τ σ 2 ãã 2 d m +1 , (38) where we hav e used the fact that, under H 0 , y [ n ] = z 2 [ n ] . Misdetection pr obability: Under H 1 , the analysis is more in volv ed due to the statistical dependence between the trans- mitted e xtremum index j and the samples of y [ · ] in its neighborhood, as well as due to the composite nature of the alternativ e hypothesis (unknown delay d ). Still, we may deri ve an exact expression for the MD probability , as follows. Pr oposition 2 (MD probability): Let σ 2 x ≜ σ 2 s + σ 2 1 , β ≜ σ 2 s σ 2 x , (39) σ 2 MMSE ≜ σ 2 2 + β σ 2 1 , σ 2 eff ≜ β 2 σ 2 x + σ 2 MMSE , (40) M in ( j ) ≜ min( d m , j ) + min( d m , N − 1 − j ) , (41) M out ( j ) ≜ 2 d m − M in ( j ) , (42) and define Φ( · ) as the standard Gaussian cumulative dis- tribution function (CDF), Φ 2 ( · , · ; ρ ) as the CDF of a zero- mean bi variate Gaussian with unit variances and correlation coefficient ρ , and Φ − 1 ( · ) as the in verse of Φ( · ) . Then, for the decision rule ( 12 ), the MD probability P MD ( τ ) ≜ P ( δ ( m , Y N ) = H 0 | H 1 ) is giv en by P MD ( τ ) = 1 Z 0 N u N − 1 1 N N − 1 X j =0 Q β σ x Φ − 1 ( u ) − τ σ MMSE × ñ Φ 2 Φ − 1 ( u ) , τ σ eff ; ρ u ô M in ( j ) î Φ Ä τ σ eff äó M out ( j ) ) d u. (43) Pr oof: Using the linear minimum mean-square error decomposition of s [ n ] based on x [ n ] , we may write y [ n ] = β x [ n − d ] + z [ n ] , (44) with z [ n ] iid ∼ N (0 , σ 2 MMSE ) independent of { x [ n ] } n ∈ Z . By sym- metry , j is uniform on { 0 , . . . , N − 1 } and independent of x [ j ] . Moreov er , given { j = j, x [ j ] = x } , the N − 1 remaining samples are iid as v | v ≤ x with v ∼ N (0 , σ 2 x ) . Therefore, P MD = E ï P Å max ℓ ∈D y [ j + ℓ ] < τ | X N , H 1 ã | H 1 ò (45) = E " Y ℓ ∈D P ( β x [ j + ℓ − d ] − τ < − z [ j + ℓ ] | X N , H 1 ) | H 1 # (46) = E Q Ä β x [ j ] − τ σ MMSE ä | {z } “aligned” · Y ℓ ∈D ℓ = d Q Ä β x [ j + ℓ − d ] − τ σ MMSE ä | {z } “non-aligned” | H 1 . (47) Now , consider the “inside/outside” structure for the non- aligned lags. Fix j ∈ { 0 , . . . , N − 1 } and write r ≜ ℓ − d ∈ D \{ 0 } . Then j + r either falls inside the encoded block { 0 , . . . , N − 1 } , or outside : • Inside lags ( j + r ∈ { 0 , . . . , N − 1 } , r = 0 ) : Conditioned on { j = j, x [ j ] = x } , the M in ( j ) values { x [ j + r ] } inside are iid as v | v ≤ x with v ∼ N (0 , σ 2 x ) . Using ( 44 ), for a generic inside lag, E ï Q Å β x [ j + r ] − τ σ MMSE ã | x [ j ] = x, j = j, H 1 ò (48) = E ï Q Å β v − τ σ MMSE ã | v ≤ x, H 1 ò ≜ B in ( x, τ ) . (49) Since { x [ j + r ] } inside are iid given x , the M in ( j ) (defined in ( 41 )) inside factors multiply to B in ( x, τ ) M in ( j ) . • Outside lags ( j + r / ∈ { 0 , . . . , N − 1 } ) : These x [ j + r ] are independent of X N —and therefore of j and x [ j ] —with law N (0 , σ 2 x ) . Hence, for a generic outside lag, E ï Q Å β x [ j + r ] − τ σ MMSE ã | x [ j ] = x, j = j, H 1 ò (50) = E ï Q Å β v − τ σ MMSE ãò ≜ B out ( τ ) , (51) so the M out ( j ) ( 42 ) factors multiply to B out ( τ ) M out ( j ) . W e now turn to compute B in ( x, τ ) and B out ( τ ) . Let v ∼ N (0 , σ 2 x ) and g ∼ N (0 , 1) independent, and define the utility random variable u ≜ β v − σ MMSE · g ∼ N (0 , σ 2 eff ) . Then, B out ( τ ) = E [ P ( u < τ | v )] = P ( u < τ ) = Φ Å τ σ eff ã . (52) For the inside factor , by Bayes’ rule and standardization, B in ( x, τ ) = P ( u < τ , v ≤ x ) P ( v ≤ x ) = Φ 2 Ä x σ x , τ σ eff ; ρ ä Φ Ä x σ x ä , (53) where ρ ≜ β σ x σ eff is the correlation coefficient between v and u , and Φ 2 ( t 1 , t 2 ; ρ ) ≜ R t 1 −∞ ϕ ( v )Φ Å t 2 − ρv √ 1 − ρ 2 ã d v is the standard biv ariate normal CDF with correlation ρ . 5 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 σ s = 1 , σ 1 = σ 2 = 1 . 5 σ s = 1 , σ 1 = 0 . 85 , σ 2 = 0 . 8 false alarm probability , P F A detection probability , P D 1 -bit (empirical) MID (empirical) Exact (theoretical) Fig. 1: ROC curve for k = 8 and d m = 50 . 0 0.2 0.4 0.6 0.8 1 0 0.2 0.4 0.6 0.8 1 σ s = 1 , σ 1 = σ 2 = 1 . 5 σ s = 1 , σ 1 = 0 . 85 , σ 2 = 0 . 8 false alarm probability , P F A detection probability , P D 1 -bit (empirical) MID (empirical) Exact (theoretical) Fig. 2: ROC curve for k = 12 and d m = 150 . Having established the conditional e xpectations gi ven { j = j, x [ j ] = x } , we are left with the task of averaging over the maximum and the extremum location. Using the standard notation ϕ ( x ) ≜ 1 √ 2 π e − x 2 2 , the probability density function (PDF) of the block maximum x [ j ] is given by p x [ j ] ( x ) = N σ x ϕ Ä x σ x ä Φ Ä x σ x ä N − 1 , x ∈ R , (54) and P ( j = j ) = 1 N for all j . Plugging the “aligned” and “non- aligned” factors into ( 47 ) and a veraging yields P MD ( τ ) = 1 N N − 1 X j =0 ∞ Z −∞ Q Å β x − τ σ MMSE ã | {z } aligned · B in ( x, τ ) M in ( j ) | {z } inside lags × B out ( τ ) M out ( j ) | {z } outside lags p x [ j ] ( x ) d x. (55) Using the change of variables u = Φ( x/σ x ) , hence x = σ x Φ − 1 ( u ) and p x [ j ] ( x ) d x = N u N − 1 d u , giv es ( 43 ). I V . S I M U L A T I O N R E S U LT S W e compare the empirical performance of the MID ( 12 ) with its analytically predicted P F A in ( 33 ) and P MD in ( 43 ), as well as with a 1 -bit-per–sample-based (e.g., [ 9 ]) quantization detector . In all simulations, we choose the admissible max- imum delay d m = { 50 , 150 } for k = { 8 , 12 } , respectively , fix the true delay to d = 32 and set N = 2 k . The receiv er operating characteristic (R OC) curves for k = { 8 , 12 } (Figs. 1 and 2 ) show an ef fectively perfect match between the theoretical and empirical MID performance across all F A -10 -8 -6 -4 -2 0 2 4 6 8 10 0 0.2 0.4 0.6 0.8 1 P F A = 0 . 05 P F A = 10 − 2 SNR [ dB ] detection probability , P D 1 -bit (empirical) MID (empirical) Exact (theoretical) Fig. 3: Probability of detection P D as a function of the SNR in dB for fixed P F A , σ 1 = σ 2 = 1 , k = 8 and d m = 50 . lev els. Additionally , the MID consistently outperforms the 1 - bit-quantization-based detector, especially in the moderate-F A regime. Finally , SNR sweeps at fixed P F A ∈ { 0 . 05 , 10 − 2 } (Fig. 3 ), where σ 1 = σ 2 = 1 so that SNR = σ 2 s , confirm that the empirical results track the theoretical prediction closely , and the 1 -bit scheme continues to incur a consistent SNR penalty , highlighting the adv antages of our proposed scheme. V . C O N C L U D I N G R E M A R K S W e studied joint compression and detection in a distributed sensing setting with a limited k -bit link from a distant sensor to another , co-located with the computing unit. W e proposed a maximum-index-based detector, showed that it can be inter- preted as a correlation test closely related to the centralized GLR T , and deri ved exact nonasymptotic expressions for its F A and MD probabilities. Simulation results corroborate these analytical performance curves, and further indicate that the extremum-based scheme provides competitiv e detection per- formance despite under tight communication constraint. These findings highlight e xtremum encoding as a promising primiti ve for distributed inference under stringent rate limitations. R E F E R E N C E S [1] S. Kay , Fundamentals of Statistical Signal Pr ocessing, V olume II: Detection Theory , Pearson Education, 2009. [2] O. G. Guleryuz and U. C. Kozat, “Joint compression, detection, and routing in capacity contrained wireless sensor networks, ” in Proc. IEEE W orkshop Stat. Signal Process. (SSP) , 2005, pp. 1026–1031. [3] A. L. Chan, S. Z. Der, and N. M. Nasrabadi, “ A joint compression- discrimination neural transformation applied to target detection, ” IEEE T rans. Syst., Man, Cybern. , vol. 35, no. 4, pp. 670–681, 2005. [4] R. V iswanathan and P . K. V arshney , “Distributed detection with multiple sensors part I. fundamentals, ” Pr oceedings of the IEEE , vol. 85, no. 1, pp. 54–63, 2002. [5] J.-F . Chamberland and V . V . V eera valli, “W ireless sensors in distributed detection applications, ” IEEE Signal Pr ocess. Mag. , vol. 24, no. 3, pp. 16–25, 2007. [6] A. W eiss, Y . Kochman, and G. W . W ornell, “Joint data compression and time-delay estimation for distributed systems via extremum encoding, ” IEEE T rans. Signal Pr ocess. , 2025. [7] A. W eiss, Y . Kochman, and G. W . W ornell, “ A joint data compression and time-delay estimation method for distributed systems via extremum encoding, ” in Pr oc. IEEE Int. Conf. Acoust., Speech, Signal Pr ocess. (ICASSP) , 2024, pp. 9366–9370. [8] A. W eiss, Y . K ochman, and G. W . W ornell, “Extremum encoding for joint baseband signal compression and time-delay estimation for distributed systems, ” in Proc. IEEE Int. Conf. Acoust., Speech, Signal Pr ocess. (ICASSP) , 2025, pp. 1–5. [9] A. W eiss and G. W . W ornell, “One-bit direct position determination of narrowband gaussian signals, ” in Pr oceedings of the IEEE W orkshop on Statistical Signal Processing (SSP) , 2021, pp. 466–470.
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment