On four network monitoring parameters in graphs and their gaps
Let \( G \) be a finite simple undirected graph. Four graph parameters related to network monitoring are the \emph{geodetic set}, \emph{edge geodetic set}, \emph{strong edge geodetic set}, and \emph{monitoring edge geodetic set}, with corresponding m…
Authors: Zin Mar Myint, Avikal Srivastava
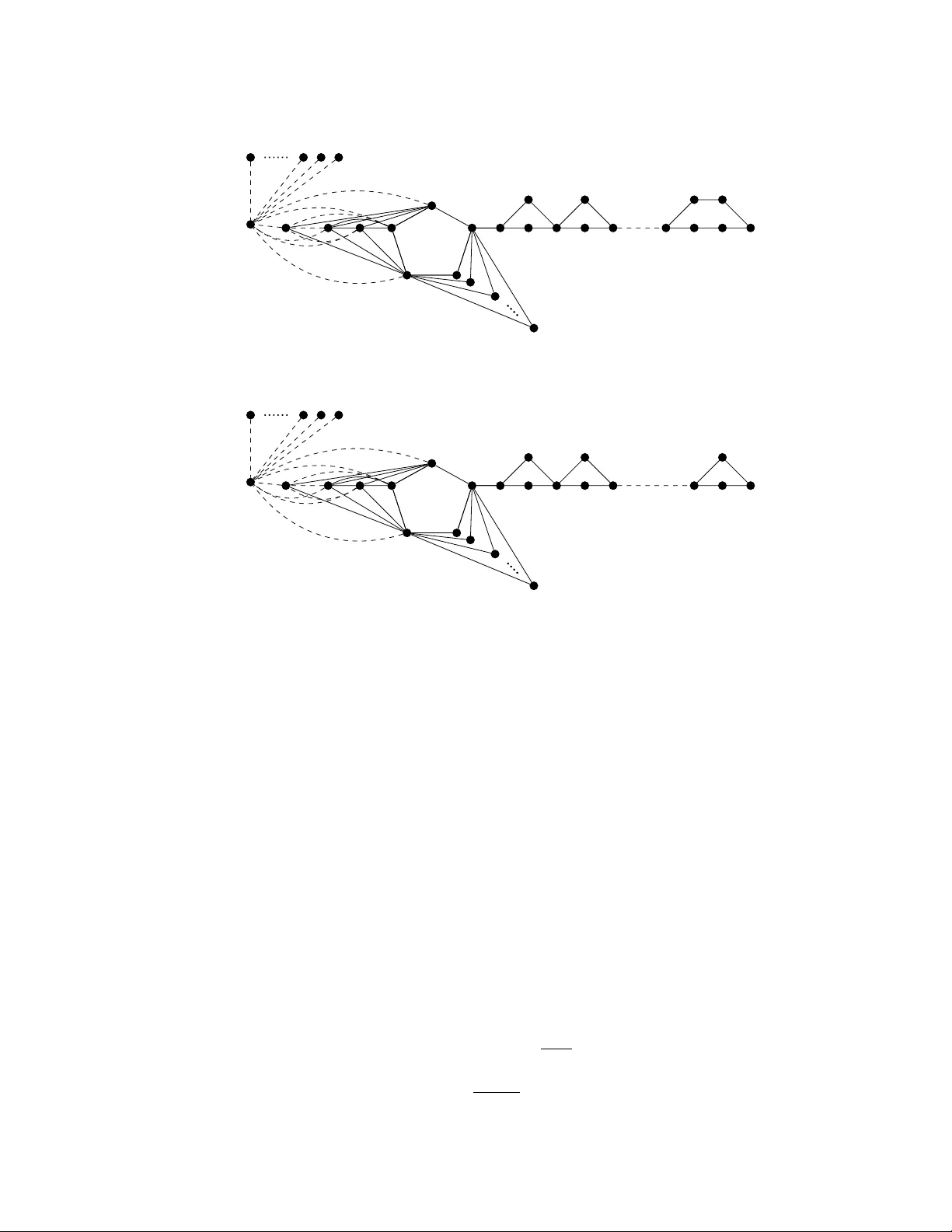
On four net w ork monitoring parameters in graphs and their gaps Zin Mar Myin t 1,2 and A vik al Sriv asta v a 1 1 Indian Institute of T ec hnology Dharw ad, India 2 P olytechnic Univ ersit y (Ky aing T ong), My anmar Abstract Let G b e a finite simple undirected graph. F our graph parameters related to net work monitoring are the ge o detic set , edge ge o detic set , str ong e dge ge o detic set , and monitoring e dge ge o detic set , with corresp onding minim um sizes, denoted by g ( G ) , eg ( G ) , seg ( G ) , and meg ( G ) , resp ectively . These parameters quan tify the minim um num ber of vertices required to monitor all vertices and edges of G under progressively stricter path-based conditions. As established by Floren t et al. (CALD AM 2023), these parameters satisfy the chain of inequalities: g ( G ) ≤ eg ( G ) ≤ seg ( G ) ≤ meg ( G ) . In 2025, Floren t et al. posed the following question: giv en in tegers a, b, c, d satisfying 2 ≤ a ≤ b ≤ c ≤ d , do es there exist a graph G such that g ( G ) = a, eg ( G ) = b, seg ( G ) = c, and meg ( G ) = d ? They partially answered this affirmatively under three sp ecific h yp otheses and gav e some constructions to supp ort it. In this article, w e first identify quadruples of v alues that cannot b e realized by any connected graph. F or all remaining admissible quadruples, w e pro vide explicit constructions of connected graphs that realize the sp ecified parameters. These constructions are mo dular and efficient, with the num ber of vertices and edges growing linearly with the largest parameter, providing a complete and constructive characterization of suc h realizable quadruples. Keyw ords: Netw ork monitoring, Geo detic set, Edge-geo detic set, Strong edge-geo detic set, Monitor- ing edge-geo detic set. 1 In tro duction Distance-based monitoring through graph theoretic mo dels provide a fundamental framew ork for net- w ork path observ ability , fault detection and routing v erification in netw ork problems. A k ey mini- mization problem in this area is to determine the minimal subset of strategically selected vertices such that they rev eal the structure of shortest paths in the graph. T o capture differen t levels of monitoring or fault-detection capability , sev eral v ertex-based parameters hav e been introduced, eac h imposing progressiv ely stronger requiremen ts on how vertices or edges are cov ered by a selected collection of "prob es" whose shortest path interactions exp ose structural information or detect faults in the netw ork. There are four parameters relev an t to the con text of this article, namely , the ge o detic numb er g ( G ) , the e dge-ge o detic numb er eg ( G ) , the str ong e dge-ge o detic numb er seg ( G ) , and the monitoring e dge- ge o detic numb er meg ( G ) . They pla y central roles in measuring the efficiency of probe placement in comm unication netw orks. A set S ⊆ V ( G ) is called a ge o detic set if every v ertex x ∈ V ( G ) lies on an y shortest path b etw een some pair of distinct v ertices in S . The minim um cardinality of a geo detic set is the ge o detic numb er of G , denoted b y g ( G ) . This concept w as first in tro duced by Harary et al. [4]. An e dge-ge o detic set of a graph G is a vertex subset S ⊆ V ( G ) suc h that ev ery edge of G lies on an y shortest path betw een some pair of distinct v ertices in S . The minim um cardinality of an edge-geo detic set is the e dge-ge o detic numb er of G , denoted by eg ( G ) , a notion introduced by Atici et al. [1]. 1 Later, Manuel et al. [5] refined this notion further by defining the strong edge-geo detic set, which states that, instead of allo wing all shortest paths b etw een each pair of selected vertices, one must designate a sp e cific shortest path for each pair, and the union of these chosen paths must co ver all edges of the graph. Hence, a str ong e dge-ge o detic set of the graph G is a vertex subset S ⊆ V ( G ) together with a choice of a sp ecific shortest path P uv for each unordered pair of distinct vertices u, v ∈ S , suc h that every edge of G lies on at least one of these c hosen paths. The minimum cardinalit y of such a set is the str ong e dge-ge o detic numb er , denoted seg ( G ) . The most recen t and most restrictiv e parameter in this family is the monitoring e dge-ge o detic set (MEG-set), introduced b y F oucaud et al. [3] in the con text of fault detection. Here, the requiremen t is that every edge must b e monitored by some pair of vertices in S ⊆ V ( G ) where a pair u, v ∈ S monitors an edge e if e lies on every shortest u – v path in G . The minim um cardinality of such a set is the monitoring e dge-ge o detic numb er of G , denoted meg ( G ) . These four parameters are known [2] to hold the following relation g ( G ) ≤ eg ( G ) ≤ seg ( G ) ≤ meg ( G ) , and each corresp onds to increasingly stringent monitoring conditions capturing a progressively stronger notion of cov erage. Moreov er, the relationships among these four g ( G ) , eg ( G ) , seg ( G ) , and meg ( G ) w ere analyzed in detail in F oucaud et al. [2], where the authors initiated a systematic study of the p ossible differences b etw een them. A central problem p osed in that w ork is the following: In [2], given integers 2 ≤ a ≤ b ≤ c ≤ d , do es there exist a connected graph G such that g ( G ) = a, eg ( G ) = b, seg ( G ) = c, meg ( G ) = d ? In the same pap er, the authors constructed graphs showing that nearly all quadruples 4 ≤ a ≤ b ≤ c ≤ d are realizable, sub ject to a small num b er of exceptional configurations. Their constructions rely on bipartite base graphs with p endent attachmen ts and carefully arranged sub divisions, using interactions among simplicial v ertices, creating the clique and twin structures to control the parameter v alues. Ho wev er, some specific cases, particularly those inv olving smaller v alues or tight equalities betw een consecutiv e parameters (for instance, when d = c + 1 with b = a + 1 ), were excluded b y the constraints of the original construction. Moreo ver, the structural b ehavior of the resulting graphs suggests that further refinement and generalization of the construction migh t bridge these exceptional gaps and lead to a complete c haracterization for all p ositive integers 2 ≤ a ≤ b ≤ c ≤ d . 1.1 Our contributions In this article, we resolve the realizability problem completely . W e introduce a mo dified and structurally flexible construction that pro duces, for every integer quadruple 2 ≤ a ≤ b ≤ c ≤ d, a connected graph G satisfying g ( G ) = a , eg ( G ) = b , seg ( G ) = c , and meg ( G ) = d . Our approac h refines the building of construction that was used in [2], allowing for precise control o ver the roles of simplicial v ertices, t wins, p endant attachmen ts, and sub divided paths, and eliminating all previously unresolv ed cases. This establishes the first complete description of the ac hiev able combinations of the four monitoring- related parameters. (i) Section 2 recalls the corresp onding definitions and known results that will be used throughout the article, including structural lemmas for vertices that must belong to ev ery monitoring edge- geo detic set. (ii) Section 3 is divided into four parts: (a) Section 3.1 shows that there do es not exist any connected graph G a,b,c,d for some sp ecific parameters, (b) Section 3.2 pro vides modified constructions whic h pro ve the realizability of g ( G ) = 2 and eg ( G ) = 3 . 2 (c) Section 3.3 extends the general realization for g ( G ) = 2 and eg ( G ) ≥ 4 , and (d) Section 3.4 generalizes the constructions to arbitrary parameter quadruples and analyze the computational complexity of our construction, showing that G a,b,c,d can b e built in O ( d ) time, with the num b er of vertices and edges gro wing linearly with the largest parameter d . (iii) Section 4 concludes the article with op en directions for future research. 2 Preliminaries and kno wn results Throughout this article, all graphs are finite, simple, and connected. F or a graph G , we denote its v ertex set b y V ( G ) and its edge set by E ( G ) . A v ertex v ∈ V ( G ) is simplicial if its neighborho o d induces a clique in G , and it is called p endent if deg G ( v ) = 1 . A v ertex v is a cut vertex if the graph G \ { v } is disconnected. A clique of G is an induced subgraph that is a complete graph. Lemma 1 ([3]) . L et G b e a gr aph with a cut-vertex u . Then u is never p art of any minimal MEG-set of G . Lemma 2 ([3]) . In a c onne cte d gr aph G with at le ast one e dge, any simplicial vertex b elongs to any e dge-ge o detic set and thus, to any MEG-set of G . It was sho wn in [3] that this implies that all p endan t vertices of a graph G will b e part of any geo detic set, edge-geo detic set, strong edge-geo detic set, and monitoring edge-geo detic set by theorem 2. T w o distinct vertices u, v are op en twins if N ( u ) = N ( v ) , and close d twins if N [ u ] = N [ v ] . In this w ork, we simply refer to them as twins . T wins b ehav e rigidly with resp ect to monitoring. Lemma 3 ([3]) . Every p air of (op en or close d) twins of de gr e e at le ast one b elongs to every MEG-set. An imp ortant structural link betw een MEG-sets and strong edge-geodetic sets w as established in [2]. Prop osition 4 ([2]) . L et S ⊆ V ( G ) b e a vertex subset of a gr aph G and let f b e an assignment of a shortest p ath to e ach p air of vertic es of S . Then S is an MEG-set if and only if S , along with the assignment f , is a str ong e dge-ge o detic set for any choic e of f . Theorem 5 ([2]) . L et G b e a gr aph. A vertex v ∈ V ( G ) is in every MEG-set of G if and only if ther e exists u ∈ N ( v ) such that for any vertex x ∈ N ( v ) , any induc e d 2-p ath uvx is p art of a 4-cycle. Building on these structural observ ations, the next section first determines which parameter quadru- ples can o ccur in connected graphs, and then develops a refined construction that o vercomes all re- maining limitations. In particular, we sho w that every quadruple 2 ≤ a ≤ b ≤ c ≤ d is realizable. 3 Main Results The structural observ ations collected in Section 2 imp ose strong restrictions on how the four parameters g ( G ) , eg ( G ) , seg ( G ) , and meg ( G ) may in teract. Before presenting our constructions, w e b egin to use these constrain ts to eliminate several parameter quadruples that an y connected graph cannot realize. These results form the first step to ward a full characterization. 3.1 Eliminating imp ossible parameter quadruples W e first identify certain parameter combinations that cannot b e realized, clarifying structural limita- tions imp osed by the preliminary results. 3 Theorem 6. F or any inte ger d > 2 , ther e do es not exist a c onne cte d gr aph G satisfying g ( G ) = eg ( G ) = seg ( G ) = 2 and meg ( G ) = d. Pr o of. Assume, for the sak e of con tradiction, that suc h a connected graph G exists . Since g ( G ) = 2 , there must exist a pair of v ertices u, v suc h that every vertex of G lies on some shortest u – v path. No w, eg ( G ) = 2 implies that every edge of G also lies on a shortest path b etw een u and v . Since seg ( G ) = 2 , there exists a set S = { u, v } ⊆ V ( G ) and an assignmen t that selects a particular shortest u − v path P uv suc h that every edge of G lies on the chosen path P uv . In other w ords, the set of edges of G is contained in the edge-set of P uv ; hence every edge of G is an edge of P uv . Consequen tly , there cannot exist any shortest u − v path different from P uv : any alternativ e shortest path would use an edge not in P uv , contradicting that all edges of G lie on P uv . Th us P uv is the unique shortest u − v path in G . As there is a unique shortest u - v path in G and this path cov ers all the v ertices and edges of G , the graph G is precisely P uv . Hence, meg ( G ) = meg ( P uv ) = 2 , contradicting the assumption meg ( G ) = d > 2 . This contradiction shows that no such graph G exists. W e no w exclude another set of parameter quadruples that are incompatible, sp ecifically those with eg ( G ) = seg ( G ) = 3 . Theorem 7. Ther e do es not exist a c onne cte d gr aph G with p ar ameters g ( G ) = 2 , eg ( G ) = 3 , seg ( G ) = 3 , meg ( G ) = d ≥ 3 . In other wor ds, G (2 , 3 , 3 ,d ) gr aphs do not exist. Pr o of. Since g ( G ) = 2 , let { u, v } be a geo detic set of G . Then ev ery v ertex of G lies on some shortest u – v path. Ho wev er, since eg ( G ) = 3 , the pair { u, v } do es not cov er all edges. Therefore, there exists at least one edge xy ∈ E ( G ) whic h does not lie on any shortest u – v path. W e observ e that each of x and y app ears on at least one shortest u – v path, but the edge xy never appears on an y suc h path. Since eg ( G ) = 3 and xy is not con tained in an y shortest u – v path, b oth x and y must be included in the edge-geo detic set to co ver the edge xy . Due to this argument, x and y must b e included in the strong edge-geo detic set as w ell. Since seg ( G ) = 3 , let us say S = { x, y , w } which cov ers all edges. By definition of the strong edge-geo detic n umber, there exist sp ecific shortest paths P xy , P xw , P y w whose union cov ers all edges of G . This structure forces the union P xw ∪ P y w ∪ { xy } to contain at least one cycle. Note that there is no p endent vertex b ecause ev ery panden t v ertex b elongs to the in tersection of all 4 parameters. Hence, u, v , x, y , w are not p endent v ertices. In particular, the edge xy lies on P xy , but P xy do es not in tersect an y shortest u – v path. At the same time, P xw and P y w m ust cov er all remaining edges and pass through all vertices of the graph G . Due to the definition of a strong edge-geo detic set, there are unique shortest paths b etw een x – w and y – w . Without loss of generality , let there be t wo shortest paths betw een x and w , then S cannot cov er all edges of the graph G . Hence, there is a unique shortest path b etw een x – w and y – w . Thus, G is the form as xy · · · w · · · x and it is a cycle in whic h ev ery edge of the cycle must lie on some shortest u – v path. But the cycle con tains the edge xy , which b y assumption lies on no shortest u – v path. Therefore, it is a contradiction that no matter whether ev en or o dd cycle, since g ( G ) = eg ( G ) . This is imp ossible. Therefore, no suc h graph G exists. Ha ving iden tified the parameter quadruples with g ( G ) = 2 and eg ( G ) = 3 that cannot b e realized, w e now turn to the complemen tary task of establishing existence results. 4 3.2 Realizing the case g ( G ) = 2 and eg ( G ) = 3 In this subsection, we construct explicit families of connected graphs realizing all remaining admissible quadruples with g ( G ) = 2 and eg ( G ) = 3 , thereb y completing the analysis for this parameter 2 < 3 < c ≤ d . Lemma 8. L et G b e a c onne cte d gr aph and let u ∈ V ( G ) . If u b elongs to every e dge-ge o detic set of G , then u b elongs to every str ong e dge-ge o detic set of G . Pr o of. Let u b elongs to ev ery edge-geodetic set of G . Supp ose, for contradiction, that there exists a strong edge-geo detic set S ⊆ V ( G ) such that u / ∈ S . By the definition of a strong edge-geodetic set, for every unordered pair { x, y } ⊆ S one specific shortest x – y path P xy is chosen and the union of these paths cov ers all edges of G . Since ev ery edge of G lies on some shortest path b etw een a pair of vertices of S . Hence, S is also an edge-geo detic set of G . This contradicts that u b elongs to every edge-geo detic set. Therefore, u must b elong to every strong edge-geo detic set of G . Lemma 9. L et G b e a c onne cte d gr aph and let u ∈ V ( G ) . If u b elongs to every str ong e dge-ge o detic set of G , then u b elongs to every monitoring e dge-ge o detic set of G . Pr o of. Let u b elong to ev ery strong edge-geo detic set of G . Supp ose, for the sake of contradiction, that there exists a monitoring edge-geo detic set S ⊆ V ( G ) suc h that u / ∈ S . Since S is a monitoring edge-geo detic set, u lies on all shortest paths betw een some pair of vertices in S . Let f b e an assignmen t of a shortest path to eac h pair of vertices of S . Then, by the Theorem 4 that S , along with the assignment f , is a strong edge-geo detic set for any c hoice of f . Th us, there exists a strong edge-geo detic set of G that do es not contain u , contradicting the assumption that u b elongs to ev ery strong edge-geodetic set of G . Therefore, u must b elong to ev ery monitoring edge-geodetic set of G . Corollary 10. L et G b e a c onne cte d gr aph. Any vertex c ontaine d in every e dge-ge o detic set of G is c ontaine d in every monitoring e dge-ge o detic set of G . Pr o of. The result follows immediately from Lemmas 8 and 9. W e no w pro v e that for every c ≥ 4 and every d ≥ c , there exists a connected graph realizing the parameter quadruple ( g , eg , seg , meg ) = (2 , 3 , c, d ) . Theorem 11. F or any inte ger c ≥ 4 , ther e exists a c onne cte d gr aph G 2 , 3 ,c,d such that g ( G 2 , 3 ,c,d ) = 2 , eg ( G 2 , 3 ,c,d ) = 3 , seg ( G 2 , 3 ,c,d ) = c, meg ( G 2 , 3 ,c,d ) = d . Pr o of. The graph G 2 , 3 ,c,d is constructed as sho wn in Figure 1. W e define the v ariable r as follows: r = d − c + 1 , if d − c is odd , d − c, if d − c is even , It consists of c − 2 parallel paths of length r + 4 lab elled x i w i u i u ′ i v i 0 v i 1 · · · v i r for i ∈ { 0 , . . . , c − 3 } , together with edges x i x i +1 and v ir v ( i +1) r for 0 ≤ i ≤ c − 4 . W e add t wins v ′ 0 i to the vertices of the form v 0 i where i = 2 n + 1 and n ∈ { 0 , · · · , r − 2 2 } when d − c > 0 . Finally , a v ertex z is added and joined to w 0 , u 0 and w 1 . In the case wherein d − c > 0 is ev en, we add an additional twin v ′ 1( r − 1) to the vertex v 1( r − 1) . W e define the set V , Y and X as follows: 5 x 0 w 0 u 0 y 0 v 00 v 01 v 02 v 03 v 04 v 0( r − 2) v 0( r − 1) v 0 r x 1 w 1 u 1 y 1 v 10 v 11 v 12 v 13 v 14 v 1( r − 2) v 1( r − 1) v 1 r x 2 w 2 u 2 y 2 v 20 v 21 v 22 v 23 v 24 v 2( r − 2) v 2( r − 1) v 2 r x 3 w 3 u 3 y 3 v 30 v 31 v 32 v 33 v 34 v 3( r − 2) v 3( r − 1) v 3 r z v ′ 1 r − 1 v ′ 01 v ′ 03 v ′ 0( r − 1) x c − 4 w c − 4 u c − 4 y c − 4 v ( c − 4)0 v ( c − 4)1 v ( c − 4)2 v ( c − 4)3 v ( c − 4)4 v ( c − 4)( r − 2) v ( c − 4)( r − 1) v ( c − 4) r x c − 3 w c − 3 u c − 3 u ′ c − 3 v ( c − 3)0 v ( c − 3)1 v ( c − 3)2 v ( c − 3)3 v ( c − 3)4 v ( c − 3)( r − 2) v ( c − 3)( r − 1) v ( c − 3) r Figure 1: The graph G 2 , 3 ,c,d for c ≥ 4 . (The vertex v ′ 1( r − 1) and the dotted edges are added when d − c ≥ 2 is even.) V = { v 1( r − 1) , · · · , v ( c − 3)( r − 1) } , Y = { v 1 r , · · · , v ( c − 3) r } X = { v 0 i , v ′ 0 i : i = 2 n + 1 where n ∈ { 0 , · · · , r − 2 2 }} , if d − c is o dd , { v 0 i , v ′ 0 i : i = 2 n + 1 where n ∈ { 0 , · · · , r − 2 2 }} ∪ { v ′ 1( r − 1) } , if d − c > 0 is even , ∅ , if d − c = 0 This is the construction of G 2 , 3 ,c,d where c ≥ 4 . No w, we calculate the parameter g , eg , seg and meg of this construction graph as follows: Ev ery v ertex of G 2 , 3 ,c,d lies on at least one shortest path of either v 0 r – x c − 3 path or x 0 – v ( c − 3) r path. Hence, either { v 0 r , x c − 3 } or { x 0 , v ( c − 3) r } is a geo detic set and g ( G 2 , 3 ,c,d ) = 2 . Observ e that the edge z w 0 do es not lie on an y shortest either v 0 r – x c − 3 path or x 0 – v ( c − 3) r path. Therefore, it forces the v ertex z must b elong to ev ery edge-geo detic set to co v er all incident edges of z . Moreo ver, since no pair of vertices cov ers all edges of the graph, w e tak e the set with at least 3 v ertices. Let S eg = { z , x 0 , v ( c − 3) r } . W e claim that S eg is an edge-geo detic set. Indeed, the pair { x 0 , v ( c − 3) r } co vers all edges of the la yered structure of the graph, while the pairs { z , x 0 } and { z , v ( c − 3) r } co ver the edges incident with z . Hence, the edge-geo detic num b er of the graph is, eg ( G 2 , 3 ,c,d ) = | S eg | = 3 Since z b elongs to every edge-geo detic set, Lemma 8 implies that z b elongs to every strong edge- geo detic set. F urthermore, the edges of the paths x 0 w 0 z , x 0 – v 0 r and the t win v ertices on the z – v 0 r paths force the inclusion of the v ertices x 0 and v 0 r in the strong edge-geo detic set. F or eac h i ∈ { 1 , . . . , c − 3 } , the edge v i ( r − 1) v ir lies on a unique shortest v i ( r − 1) – v ir path. Hence, at least one of v i ( r − 1) or v ir m ust b elong to any strong edge-geodetic set when d − c is o dd. When 6 d − c is ev en, v ir m ust belong to any strong edge-geo detic set to cov er the v ′ 1( r − 1) v 1 r . Consequen tly , ev ery strong edge-geo detic set has cardinality at least c . On the other hand, the set { x 0 , z , v 0 r } ∪ { v 1 r , . . . , v ( c − 3) r } admits a choice of shortest paths whose union cov ers all edges of G 2 , 3 ,c,d . Therefore, seg ( G 2 , 3 ,c,d ) = |{ x 0 , z , v 0 r }| + | Y | = 3 + c − 3 = c. By Lemma 9, the v ertex z b elongs to ev ery monitoring edge-geo detic set. Moreo ver, for each i ∈ { 1 , . . . , c − 3 } , at least one of v i ( r − 1) or v ir m ust b elong to every monitoring edge-geo detic set. Ho wev er, c ho osing v ir do es not allow all edges to be monitored, whereas the v ertices v i ( r − 1) , together with x 0 , z and vertices of X (as they are twins and by the theorem 3), monitor all edges of the graph. Th us, the set { x 0 , z } ∪ { v 1( r − 1) , . . . , v ( c − 3)( r − 1) } ∪ X is a monitoring edge-geo detic set, and n o smaller such set exists. Hence, meg ( G 2 , 3 ,c,d ) = |{ x 0 , z }| + | V | + | X | = 2 + c − 3 + d − c + 1 = d, if d − c > 0 , |{ x 0 , z , v 00 }| + | V | + | X | = 3 + c − 3 + 0 = c = d, if d − c = 0 This completes the pro of. 3.3 General realization for g ( G ) = 2 and eg ( G ) = 3 The previous Section 3.1 and section 3.2 were dev oted to the detailed analysis of the case g ( G ) = 2 and eg ( G ) = 3 , including b oth non-existence results and explicit constructions realizing all admissible parameter quadruples. W e now mov e beyond this exceptional case and establish a general existence theorem for all remaining admissible quadruples with g ( G ) = 2 . Theorem 12. F or any p ositive inte gers 2 = a ≤ b ≤ c ≤ d , exc ept for b = 3 , ther e exists a c onne cte d gr aph G 2 ,b,c,d with g ( G 2 ,b,c,d ) = 2 , eg ( G 2 ,b,c,d ) = b, seg ( G 2 ,b,c,d ) = c, meg ( G 2 ,b,c,d ) = d. Pr o of. W e construct G 2 ,b,c,d except for b = 3 in three cases dep ending on the parity of d − c . Define r = d − c, d − c o dd , d − c + 2 , d − c > 0 ev en , 0 , d − c = 0 . A t the b eginning, drawing a path P r +4 and lab eling the vertices in order as y , z 1 , w 1 , x 0 , x 1 , . . . , x r . Then, we add b − 3 parallel paths y z i w i x 0 from y to x 0 where i ∈ { 2 , . . . , b − 2 } . Let W = { w 1 , . . . , w b − 2 } , and make W a clique. Next again, adding c − b + 1 additional parallel paths y f i v i x 0 from y to x 0 where i ∈ { 1 , 2 , . . . , c − b + 1 } . F or each i ∈ { 1 , . . . , c − b + 1 } , let V = { v 1 , . . . , v c − b +1 } . F or the last step of the construction, W e distinguish the three cases: (i) If d − c > 0 even , w e add op en twins x ′ 2 i to each v ertex x 2 i , 1 ≤ i ≤ ⌊ d − c − 1 2 ⌋ , and add a parallel path x r − 3 x ′ r − 2 x ′ r − 1 x r . Define X = { x 2 i , x ′ 2 i : 1 ≤ i ≤ d − c − 1 2 } ∪ { x r − 1 , x ′ r − 1 } . 7 y x 0 z 1 w 1 z 2 w 2 z b − 2 w b − 2 f 1 v 1 f 2 v 2 f c − b +1 v c − b +1 (a) 2 , b, c, d where b = 3 and d − c = 0 . y x 0 z 1 w 1 z 2 w 2 z b − 2 w b − 2 f 1 v 1 f 2 v 2 f c − b +1 v c − b +1 x 1 x 2 x 3 x 4 x 5 x r − 2 x r − 1 x r x ′ 2 x ′ 4 x ′ r − 1 (b) 2 , b, c, d where b = 3 and d − c is o dd. y x 0 z 1 w 1 z 2 w 2 z b − 2 w b − 2 f 1 v 1 f 2 v 2 f c − b +1 v c − b +1 x 1 x 2 x 3 x 4 x 5 x r − 3 x r − 2 x r − 1 x r x ′ 2 x ′ 4 x ′ r − 2 x ′ r − 1 (c) 2 , b, c, d where b = 3 , d − c > 0 and d − c is ev en. (ii) If d − c o dd , add op en twins x ′ 2 i to each x 2 i for 1 ≤ i ≤ ⌊ d − c 2 ⌋ . Set X = { x 2 i , x ′ 2 i : 1 ≤ i ≤ ⌊ d − c 2 ⌋} ∪ { x r } . (iii) If d − c = 0 , set X = ∅ . This completes the construction. Now, w e present the calculation of g , eg , seg , and meg is as follo ws: Ev ery vertex of the graph G 2 ,b,c,d is co vered in at least one of the shortest paths b etw een vertices y and x r . Hence, the geodetic set is { y , x r } and the geo detic num b er is g ( G 2 , 2 ,c,d ) = |{ y, x r }| = 2 Observ e that none of the s hortest paths b etw een y and x 0 co vers the edges of the clique W . Thus, w i ∈ W must b e chosen as in our edge-geodetic set. Hence, edge-geo detic set is { y , x 0 } ∪ W and the edge-geo detic num b er of the graph is eg ( G 2 ,b,c,d ) = |{ y, x 0 }| + | W | = 2 + ( b − 2) = b. F or the strong edge-geodetic set, w e notice that the path y z 1 w 1 x 0 x 1 · · · x r in the graph G 2 ,b,c,d is a diametral path. Hence, need to include y and x r as they are the terminal vertices on the opp osite ends of the graph and all the vertices of W to co ver the edges of the clique. Hence, we can assign that a shortest y – x r path can co ver at most one of the c − b + 1 parallel paths y f i v i x 0 . Without loss of generalit y , assume it cov ers y f 1 v 1 x 0 . Thus, to cov er the remaining y f i v i x 0 paths, all remaining v i (for i ≥ 2 ) must b e included. Hence, the strong edge-geo detic set is { y, x r } ∪ W ∪ ( V \ { v 1 } ) and strong edge-geo detic num b er is 8 seg ( G 2 ,b,c,d ) = |{ y, x r }| + | W | + ( | V | − 1) = 2 + b − 2 + c − b + 1 − 1 = c F or the calculation of the monitoring edge-geodetic n umber, w e kno w that all edges of the clique require all w i in W . Then, to monitor all edges that lie on the shortest paths b etw een y and w i , y is required to add to the MEG-set. Moreo v er, to monitor all parallel edges b etw een y and x 0 , each v i is required to monitor those parallel paths. F urthermore, we kno w that all t win vertices m ust b e included in the MEG-set. In this case, we pro ceed with three cases separately as p er the v alues of r , (i) When d − c > 0 even , w e need to tak e twin vertices along with the vertices x r − 1 and x ′ r − 1 to monitor edges of the C 6 formed on the end of the path x 0 x 1 . . . x r . Hence, the MEG-set of G 2 ,b,c,d is { y } ∪ W ∪ V ∪ X and meg ( G 2 ,b,c,d ) = |{ y }| + | W | + | V | + | X | = 1 + b − 2 + c − b + 1 + 2( d − c − 2 2 ) + 2 = d (ii) When d − c is o dd, we need to tak e t win v ertices along with vertex x r to monitor all final edges x ′ r − 1 x r and x r − 1 x r . Hence, the MEG-set of G 2 ,b,c,d is { y } ∪ W ∪ V ∪ X and meg ( G 2 ,b,c,d ) = |{ y }| + | W | + | V | + | X | = 1 + b − 2 + c − b + 1 + 2 ( d − c − 1) 2 + 1 = d (iii) When d − c = 0 , there do es not exist an y t win v ertices and X = ∅ . Hence, y to eac h w i and eac h w i x 0 to eac h x 0 v i and the edges of the clique in W hav e been monitored b y { y } ∪ W ∪ V . Henc e, the v ertex x 0 is not required to tak e as in the MEG-set. Hence, the monitoring edge-geodetic n umber of the graph is, meg ( G 2 ,b,c,d ) = |{ y }| + | W | + | V | = 1 + b − 2 + c − b + 1 = c = d Th us in all cases, meg ( G 2 ,b,c,d ) = d , completing the pro of. While Theorem 12 guaran tees the existence of graphs realizing all admissible parameter quadruples with g ( G ) = 2 and eg ( G ) = 3 , its pro of relies on sev eral case-dep endent arguments. W e now present a general construction framework that subsumes these cases and systematically produces graphs with prescrib ed v alues of the four parameters. 3.4 Generalizing the construction to arbitrary parameters So far, our analysis has focused on graphs with geo detic n umber g ( G ) = 2 . Using the general con- struction framew ork introduced in Section 3.4, we now extend these results to arbitrary v alues of the geo detic num ber. In particular, we sho w that every admissible parameter quadruple ( a, b, c, d ) with 3 ≤ a ≤ b ≤ c ≤ d can be realized by a connected graph. Theorem 13. F or any inte gers 3 ≤ a ≤ b ≤ c ≤ d , ther e exists a c onne cte d gr aph G a,b,c,d satisfying g ( G a,b,c,d ) = a, eg ( G a,b,c,d ) = b, seg ( G a,b,c,d ) = c, meg ( G a,b,c,d ) = d. Pr o of. W e present a unified construction of G a,b,c,d that achiev es the desired parameter v alues. Begin the construction with a 5-cycle whose lab el of vertices (in counterclockwise order) x, y , w 1 , z , v 1 , x. Next, we add either | W | = b − a or | W ′ | = b − a + 1 new v ertices as either W = { w 2 , w 3 , . . . , w b − a +1 } , or W ′ = { w 2 , w 3 , . . . , w b − a +2 } 9 y w 1 z v 1 x w 2 w 3 w b − a +1 w b − a +2 u 1 u 2 u 3 u a − 3 v 2 v 3 v 4 x 1 x 2 x 3 x 4 x 5 x r − 3 x r − 2 x r − 1 x r x ′ r − 2 x ′ r − 1 x ′ 2 x ′ 4 Figure 3: G a,b,c,d sho wing the clique W and extension V when d − c is o dd. y w 1 z v 1 x w 2 w 3 w b − a +1 w b − a +2 u 1 u 2 u 3 u a − 3 v 2 v 3 v 4 x 1 x 2 x 3 x 4 x 5 x r − 2 x r − 1 x r x ′ r − 1 x ′ 2 x ′ 4 Figure 4: G a,b,c,d sho wing the clique W and extension V when d − c is ev en. and make either W ∪ { w 1 } or W ′ ∪ { w 1 } into a clique (if b = a then W = ∅ and no clique edges are added). Place these clique v ertices in the figure b et ween y and z so that eac h w i is adjacent to b oth y and z . In this step, if a = 3 , then we add W and otherwise, we add W ′ . In the third step of construction, add | V | = c − b vertices V = { v 2 , . . . , v c − b +1 } . and for each v i ∈ V insert the tw o edges z v i and v i x . In the next step, add | U | = a − 3 p enden t vertices U = { u 1 , u 2 , . . . , u a − 3 } , and attac h them all to the v ertex either w b − a +1 in W or w b − a +2 in W ′ (if a = 3 then there is no p enden t vertex in the construction graph). No w, we add one more p endent v ertex x r attac hed to the v ertex x as an xx r edge. In the last step of construction, we sub divide the xx r edges by adding r − 1 vertices x 1 , x 2 , · · · , x r − 1 where r = ( d − c + 3 , if d − c is odd , d − c + 1 , if d − c is ev en , and then add the op en twin v ertices x ′ 2 i on each x 2 i as follows: If ( d − c ) is o dd, the twin v ertices x ′ 2 i for i = { 1 , 2 , · · · , ⌊ ( r − 3) 2 ⌋} , let X = { x 2 i , x ′ 2 i : 1 ≤ i ≤ ⌊ ( r − 3) 2 ⌋} ∪ { x r − 1 , x ′ r − 1 } , 10 and add the parallel path from x r − 3 to x r with distance 3 , then we can see it as a 6 c ycle form with the lab eled x r − 3 , x r − 2 , x r − 1 , x r , x ′ r − 1 , x ′ r − 2 , x r − 3 . If ( d − c ) is even, then x ′ 2 i for i = { 1 , 2 , · · · , ⌊ ( r − 1) 2 ⌋} , let X ′ = { x 2 i , x ′ 2 i : 1 ≤ i ≤ ⌊ r − 1 2 ⌋} ∪ { x r } , In this case, w e note that if d − c = 0 , then X ′ = ∅ and r = 1 . This completes the construction of the graph G a,b,c,d . After establishing this construction com- pletely , we now verify the four parameters one by one. First, we verify the geo detic num b er b y considering separately the cases a = 3 and a ≥ 4 . If a = 3 , there are no p endent vertices on the w b − a +1 . Define S g := { y , z , x r } . W e claim that S g is a geodetic set of size 3 . Since every vertex w i is adjacen t to b oth y and z , hence eac h w i lies on every shortest path b etw een y and z . By construction, the shortest paths z − x r and y − x r together cov er all vertices and edges along the branches from x to x r . Moreov er, ev ery vertex v j with 1 ≤ j ≤ c − b + 1 is adjacent to both z and x , so each v j lies on a shortest path betw een z and x r . Consequently , ev ery vertex of G 3 ,b,c,d is contained in some shortest path betw een any t w o vertices of S g , implying g ( G 3 ,b,c,d ) ≤ 3 . Since no nontrivial connected graph satisfies g ( G ) = 1 , and an y t wo vertices, suc h as w i and x r fail to cov er all vertices through their shortest paths in G 3 ,b,c,d , it follows that g ( G 3 ,b,c,d ) ≥ 3 . Com bining this with the upp er b ound established ab ov e, we obtain g ( G 3 ,b,c,d ) = 3 . If a ≥ 4 , the construction in tro duces the p enden t v ertices U = { u 1 , u 2 , . . . , u a − 3 } are attac hed to w b − a +2 . Let S ′ g := { y , z , x r } ∪ U. Due to Lemma 2, U must b elong to all four parameter sets. Hence, each u i lies on a unique shortest paths ending at w b − a + 2 which itself lies on the shortest path b etw een y and z . As before, the paths y – x r and z – x r co ver all v ertices betw een x and x r . Removing an y v ertex from S ′ g lea ves at least one p endent v ertex or in ternal vertex unco vered, so S ′ g is minimal. Hence, g ( G a,b,c,d ) = | S ′ g | = 3 + a − 3 = a. F rom the preceding argumen ts, all p endent vertices U and the terminal v ertex x r m ust belong to ev ery edge-geo detic set. Every shortest path b etw een each pendent v ertices and x r includes the edges of the paths u i w b − a +2 y x · · · x r , thus cov ering all edges along the branches from y and x to x r . Ho wev er, these v ertices alone do not cov er the edges internal to the clique W or those forming as y w i z v j x for 1 ≤ i ≤ b − a + 1 . Therefore, the vertices w i ( 1 ≤ i ≤ b − a + 1 ) m ust also b elong to every edge-geo detic set. Additionally , since z is required to cov er the edges inciden t to each v j , we m ust include z as w ell. Consequen tly , the edge-geo detic set of G a,b,c,d can b e taken as S eg = U ∪ ( W \ { w b − a +2 } ) ∪ { w 1 , z , x r } , Hence, eg ( G a,b,c,d ) = | S eg | = ( a − 3) + ( b − a ) + 3 = b. If a = 3 , there are no p enden t vertices and then w i with 1 ≤ i ≤ b − a + 1 m ust belong to the edge-geo detic set. Therefore the edge-geo detic set reduces to S ′ eg = ( W ∪ { w 1 } ) ∪ { z , x r } , whic h again satisfies eg ( G 3 ,b,c,d ) = | S ′ eg | = ( b − a ) + 1 + 2 = b. 11 W e now determine the strong edge-geo detic num ber of G a,b,c,d . Let S seg b e a strong edge-geodetic set of G a,b,c,d . As established in our construction, w e note that all v ertices of the clique W ∪ { w 1 } must b elong to any strong edge-geodetic set to co ver the edges of W ∪ { w 1 } when a = 3 . Indeed, to monitor the edges in U ∪ W ′ ∪ { w 1 } when a ≥ 4 , U ∪ ( W ′ \ { w b − a +2 } ) ∪ { w 1 } must b elong to any strong edge-geo detic set S seg . T ogether with U ∪ { x r } , these v ertices cov er all p endent branc hes and the edges inciden t to the clique. Ho wev er, each edges inciden t to vertices in V = { v 1 , . . . , v c − b +1 } adjacent to both z and x are not y et cov ered by abov e v ertices even though the vertex z is including in S seg that can cov er one vertex, sa y v 1 b et ween z and x . Hence, to ensure cov erage, w e m ust include all vertices of V . Hence, the strong edge-geodetic set of G a,b,c,d is: If a = 3 , S seg = ( W ∪ { w 1 } ) ∪ { z , x r } ∪ V , and the strong edge-geo detic num b er is seg ( G 3 ,b,c,d ) = | S seg | = | W | + |{ w 1 , z , x r }| + | V | = b − a + 3 + c − b = c. Otherwise, S seg = U ∪ ( W ′ \ { w b − a +2 } ) ∪ { x r } ∪ V , and the strong edge-geo detic num b er is seg ( G a ≥ 4 ,b,c,d ) = | S seg | = | U | + | ( W ′ \ { w b − a +2 }| + |{ w 1 , z , x r }| + | V | = a − 3 + b − a + 3 + c − b = c. Therefore, seg ( G a,b,c,d ) = c. Finally , we determine the monitoring edge-geodetic num b er of G a,b,c,d . F rom the construction and b y Lemma 2, all pendent vertices in U must b elong to an y MEG-set. Then, to monitor all edges of the clique W , the v ertices of the clique either W ∪ { w 1 } or ( W ′ \ { w b − a +2 } ) ∪ { w 1 } m ust belong to an y MEG-set (Note that w b − a +2 is a cut vertex) . Since each vertex v i of V ∪ { v 1 } is an induced 2 -path z v i x form whic h is a part of C 4 , v i m ust b elong to MEG-set by Theorem 5. Moreov er, b y Lemma 3, ev ery pair of op en twins in either X \ { x r − 1 , x ′ r − 1 } or X ′ \ { x r } m ust also b e contained in ev ery MEG-set. Now, we verify for the remaining edges by considering the following: If d − c is even, we hav e r = d − c + 1 . Since X ′ \ { x r } b elongs to every MEG-set, x r − 1 and x ′ r − 1 are also b elong to the ev ery MEG-set of G a,b,c,d . Ho wev er, x r − 1 x r and x ′ r − 1 x r edges still remain to b e monitored. Since x ′ r − 1 x r x r − 1 is an induced 2 -path and it is a part of C 4 , x r m ust be inculded in ev ery MEG-set due to Theorem 5. Hence, the MEG-set of G a,b,c,d for d − c = ev en is either ( W ∪ { w 1 } ) ∪ ( V ∪ { v 1 } ) ∪ X ′ or U ∪ ( W ∪ { w 1 } ) ∪ ( V ∪ { v 1 } ) ∪ X ′ where | X ′ | = 2 r − 1 2 + 1 = 2 d − c 2 + 1 . meg ( G 3 ,b,c,d ) = | ( W ∪ { w 1 } ) | + ( V ∪ { v 1 } ) | + | X ′ | = ( b − 3 + 1) + ( c − b + 1) + 2 d − c 2 + 1 = d and meg ( G a ≥ 4 ,b,c,d ) = | U | + | ( W ′ \ w b − a +2 ) ∪ { w 1 }| + ( V ∪ { v 1 } ) | + | X ′ | = ( a − 3) + ( b − a + 1) + ( c − b + 1) + 2 d − c 2 + 1 = d. If d − c is o dd, we ha ve r = d − c + 3 . Since X \ { x r − 1 , x ′ r − 1 } b elong to ev ery MEG-set, x r − 4 and x ′ r − 4 are also belong to the ev ery MEG-set of G a,b,c,d . How ever, the edges x r − 4 x r − 3 , x r − 3 x ′ r − 4 and 12 the path x r − 3 x r − 2 x r − 1 x r x ′ r − 1 x ′ r − 2 x r − 3 in C 6 form are not monitored yet. As p er construction, if we add only one vertex of C 6 form, it cannot monitor some edges. Hence, we note that the vertices x r − 1 and x ′ r − 1 m ust be in the MEG-set of G a,b,c,d . Then, all remaining edges will b e co vered. Therefore, x r − 1 and x ′ r − 1 m ust b e in the MEG-set of G a,b,c,d . Hence, the MEG-set G a,b,c,d for d − c = odd is either ( W ∪ { w 1 } ) ∪ ( V ∪ { v 1 } ) ∪ X or U ∪ ( W ′ ∪ { w 1 } ) ∪ ( V ∪ { v 1 } ) ∪ X where | X | = 2 r − 4 2 + 2 = 2 d − c − 1 2 + 2 . meg ( G 3 ,b,c,d ) = | ( W ∪ { w 1 } ) | + ( V ∪ { v 1 } ) | + | X | = ( b − 3 + 1) + ( c − b + 1) + ( d − c + 1) = d and meg ( G a ≥ 4 ,b,c,d ) = | U | + | ( W ′ \ w b − a +2 ) ∪ { w 1 }| + ( V ∪ { v 1 } ) | + | X | = ( a − 3) + ( b − a + 1) + ( c − b + 1) + ( d − c + 1) = d. This completes the pro of. Ha ving established the existence of graphs realizing arbitrary admissible parameter quadruples and describ ed an explicit construction for G a,b,c,d , we now briefly analyze the size and computational complexit y of the construction. 3.4.1 Complexity of the construction Let G a,b,c,d b e the graph constructed in Theorem 13. The num b er of vertices and edges in G a,b,c,d gro ws linearly with d . Starting from the base graph realizing g ( G ) = a , w e introduce three types of gadgets: eg-gadget , seg-gadget , and meg-gadget , each of which contributes a constant num b er of v ertices and edges p er increment of the corresponding parameter. The necessary gadgets can b e attached sequen tially to ac hieve the desired parameters ( b, c, d ) . Since adding eac h gadget requires O (1) operations and at most d gadgets are needed, the ov erall construction can b e completed in O ( d ) steps. Therefore, the total size of the graph satisfies | V ( G a,b,c,d ) | = O ( d ) and which we summarize in the follo wing corollary . Corollary 14. Given inte gers a ≤ b ≤ c ≤ d , a gr aph G a,b,c,d r e alizing ( g, eg , seg , meg ) = ( a, b, c, d ) c an b e c onstructe d on O ( d ) . Pr o of. The construction of G a,b,c,d starts from a fixed base graph realizing g ( G ) = a . T o ac hieve the target v alues of eg ( G ) = b , seg ( G ) = c , and meg ( G ) = d , we sequentially attach a collection of gadgets, eac h of which increases exactly one of the parameters by 1 while preserving the previously achiev ed v alues. Eac h gadget consists of a constant num b er of v ertices and edges and can b e attac hed to the existing graph using a constant num b er of op erations. Since at most d gadgets are required to reach the largest parameter meg ( G ) = d , the total num b er of construction steps is O ( d ) and the entire construction can b e p erformed on O ( d ) . 4 Conclusion In this article, w e hav e conducted a systematic study of connected graphs with prescrib ed v alues of four related parameters: the geo detic num b er g ( G ) , the edge-geodetic n umber eg ( G ) , the strong edge-geo detic num b er seg ( G ) , and the monitoring edge-geo detic num b er meg ( G ) . W e first identified combinations of parameters that are imp ossible to realize, pro viding a series of non-existence results for certain parameter quadruples. Next, for all admissible quadruples ( a, b, c, d ) , 13 w e presen ted explicit constructions of connected graphs G a,b,c,d realizing these parameters. Our con- structions are flexible and mo dular, allowing us to generate graphs for arbitrary parameter v alues while main taining linear size and ensuring efficient construction. Moreo ver, w e analyzed the computational complexit y of our construction, demonstrating that G a,b,c,d can b e built in O ( d ) steps, with the num b er of v ertices and edges growing linearly with the largest parameter d . This shows that our approac h is not only constructive but also practical for generating large graphs with desired prop erties. These results complete the characterization of realizable parameter quadruples and pro vide a foun- dation for further in v estigations. F uture work may include studying additional netw ork parameters, exploring extremal prop erties related to graph size and diameter, or extending the analysis to w eigh ted or directed graphs. Data a v ailabilit y This work has no asso ciated data. Declaration Conflict of in terest The authors hav e no comp eting interests. References [1] A tici, M.: On the edge geo detic num b er of a graph. International Journal of Computer Mathematics 80 (7), 853–861 (2003) [2] F oucaud, F., Marcille, C., Myint, Z.M., Sandeep, R., Sen, S., T aruni, S.: Bounds and extremal graphs for monitoring edge-geo detic sets in graphs. Discret. Appl. Math. (2025) [3] F oucaud, F., Nara yanan, K., Ramasubramon y Sulochana, L.: Monitoring edge-geodetic sets in graphs. In: Conference on Algorithms and Discrete Applied Mathematics. pp. 245–256. Springer (2023) [4] Harary , F., Louk akis, E., T souros, C.: The geo detic n umber of a graph. Mathematical and Com- puter Mo delling 17 (11), 89–95 (1993) [5] Man uel, P ., Kla vžar, S., Xavier, A., Arokiara j, A., Thomas, E.: Strong edge geo detic problem in net works. Op en Mathematics 15 (1), 1225–1235 (2017) 14
Original Paper
Loading high-quality paper...
Comments & Academic Discussion
Loading comments...
Leave a Comment